
Спутниковые навигационные системы
| Вид материала | Документы |
- Заседание Зал «Большой», 330.26kb.
- Приборы навигации Область исследования, 34.88kb.
- Проект «Навигационные системы, технологии и услуги», 249.93kb.
- И. В. Потуремский, Д. А. Бородавкин, ОАО "Информационные спутниковые системы" им ак., 31.3kb.
- Рабочей программы дисциплины Спутниковые и наземные системы радиосвязи по направлению, 35.36kb.
- Положение о проведении Научно-технической конференции молодых специалистов, 99.67kb.
- Спутниковые системы местоопределения, 329.88kb.
- Роль телекоммуникационных систем связи и передачи данных в современном мире нельзя, 22.06kb.
- Темы конференции: Антенно-фидерные устройства систем спутниковой связи Космические, 24.79kb.
- Цель и тематика конференции, 83.49kb.
1. краткий обзор спутниковых систем навигации
Запуск первого в мире советского искусственного спутника Земли (ИСЗ) состоялся 4 октября 1957 г.
В 1959 г. на орбиту выведен американский первый навигационный искусственный спутник Земли, а в 1964 г. вступила в эксплуатацию низкоорбитальная система Transit («Транзит») для обеспечения американских атомных ракетных подводных лодок «Поларис».
В 1967 года в СССР был выведен на орбиту первый навигационный спутник «Космос-192» с целью создания низкоорбитальной системы СНС «Циклон». Полностью система введена в эксплуатацию в 1976 г. в составе шести космических аппаратов. В 1976 был разработан гражданский вариант навигационной системы для нужд торгового морского флота, получивший название «Цикада».
Первый спутник системы GPS США был выведен на орбиту 22 февраля 1979 г. Создание группировки GPS было закончено в 1989 г.
Первый спутник системы ГЛОНАСС был запущен в СССР 12 октября 1982 г. Официальное введение системы ГЛОНАСС в действие состоялось 24 сентября 1993 г. В январе 1994 г. система состояла из 24 спутников. В период 1995 – 2004 годы количество уменьшалось до 12. В 2004 г. началось восстановлении группировки.
Галилео (Galileo) — европейский проект СНС. Европейская система предназначена для решения навигационных задач для любых подвижных объектов с точностью менее одного метра. Ожидается, что Галилео войдёт в строй в 2013 г., когда на орбиту будут выведены все 30 запланированных спутников (27 операционных и 3 резервных). Космический сегмент будет дополнен наземной инфраструктурой, включающей в себя два центра управления и глобальную сеть передающих и принимающих станций. Первый опытный спутник системы Галилео был запущен 28 декабря 2005 г. на расчётную орбиту высотой более 23000 км с наклонением 56°.
Ни одно государство не может и не хочет в своем развитии зависеть в какой-либо области от другого, хотя и дружественного в данный момент, государства. Поэтому поиск альтернативы GPS и ГЛОНАСС привел к созданию GALILEO.
14 апреля 2007 г. состоялся первый запуск китайского навигационного спутника "Бэйдоу" (Большая Медведица) для создания СНС Compass. 14 апреля 2009 г. орбиту был выведен второй навигационный спутник на геостационарную орбиту. Развертываемая Китаем подсистема GNSS, предназначенная для использования только в этой стране. Завершить создание космической навигационной системы КНР намеревается к 2015 г. Космический сегмент СНС будет сформирован из 5 спутников на геостационарной орбите и 30 спутников на средней земной орбите. Система будет полностью совместима с российской "ГЛОНАСС", Европейской "Галилео" и американской GPS.
Индийская региональная навигационная спутниковая система (Indian Regional Navigation Satellite System), сокращённо IRNSS. Первый спутник запущен в 2008 г. Спутниковая группировка IRNSS будет состоять из семи спутников на геосинхронных орбитах. Причем четыре спутника из семи в IRNSS будут размещены на орбите с наклонением в 29о по отношению к экваториальной плоскости. Проектная дата завершения работ 2011 г. IRNSS будет обеспечивать только региональное покрытие самой Индии и частей сопредельных государств.
Японская Quasi-Zenith навигационная система (QZSS). Планируемая дата запуска первого спутника в августе 2010 г. Всего в спутниковый сегмент войдут 3 спутника, орбиты которых будут выбраны таким образом, чтобы их подспутниковые точки описывали на земной поверхности одну и ту же траекторию с одинаковыми временными интервалами. При этом, по крайней мере, один спутник будет виден под углом места более 70º в любое время на территории Японии и Кореи. Эта особенность и определила название навигационной системы - Quasi-Zenith («Квази-зенитная»). Эта особенность важна для гористой местности или городов с высокими зданиями.
В ближайшей перспективе будут одновременно работать три глобальных навигационных спутниковых системы GPS, ГЛОНАСС и GALILEO. Практически во всех странах в настоящее время широко используется только GPS, нормальное функционирование которой целиком зависит от правительства США.
Использование спутниковых навигационных систем (СНС) для целей навигации приносит значительные преимущества по сравнению с обычными навигационными средствами.
СНС характеризуются более высокой точностью по сравнению с эксплуатируемыми в настоящее время системами. В сочетании с системами передачи данных “воздух-земля” СНС позволяет осуществлять автоматическое зависимое наблюдение (ADS) в любом районе воздушного пространства. Внедрение СНС и возможное в будущем снятие с эксплуатации наземных навигационных средств позволит существенно повысить регулярность, эффективность, экономичность и безопасность полетов воздушного транспорта.
В связи с тем, что в практической деятельности используется GPS и ГЛОНАСС, то далее они будут рассмотрены подробно.
- Основные принципы определения места воздушного судна
2.1. Физико-технические принципы функционирования СНС
В основу определения координат ВС положен принцип измерения дальностей до навигационных спутников.
Геометрическая интерпретация реализации этого принципа может быть объяснена следующим образом. Предположим, что в любой момент времени позиции спутников в околоземном пространстве известны, и могут быть измерены первичные навигационные параметры – дальности до спутников, находящихся в поле зрения приемника СНС. Измеренная дальность
 до одного спутника определяет поверхность положения в виде сферы с радиусом, равным измеренной дальности (рис. 2.1). [2]
до одного спутника определяет поверхность положения в виде сферы с радиусом, равным измеренной дальности (рис. 2.1). [2]
Рис. 2.1. Определение позиции ВС по спутникам
Дальности D1 и D2 до двух спутников определяют две поверхности положения, пересечение которых определяет линию положения в виде окружности. Поверхность положения, полученная с помощью третьего спутника в виде сферы с радиусом
 может иметь пересечение с линией положения в виде окружности, полученной от первых двух спутников, только в двух точках М1 и М2. Таким образом, измеренные дальности до трех спутников ограничивают возможную позицию двумя возможными точками. Методом логического исключения определяется, какая из двух точек является позицией приемника СНС. Например, если одна из точек слишком далеко от поверхности Земли, или имеет слишком большую скорость перемещения относительно земной поверхности, или находится на очень большом удалении от ранее определенной позиции, то такая точка не может быть искомой позицией. В компьютеры бортовой аппаратуры заложено несколько алгоритмов, позволяющих отличить правильную позицию от ложной.
может иметь пересечение с линией положения в виде окружности, полученной от первых двух спутников, только в двух точках М1 и М2. Таким образом, измеренные дальности до трех спутников ограничивают возможную позицию двумя возможными точками. Методом логического исключения определяется, какая из двух точек является позицией приемника СНС. Например, если одна из точек слишком далеко от поверхности Земли, или имеет слишком большую скорость перемещения относительно земной поверхности, или находится на очень большом удалении от ранее определенной позиции, то такая точка не может быть искомой позицией. В компьютеры бортовой аппаратуры заложено несколько алгоритмов, позволяющих отличить правильную позицию от ложной.Определение дальности D от спутника до приемника СНС выполняется в результате измерения времени прохождения радиосигнала от спутника до потребителя СНС сигналов по формуле:
D = c t,
где: c - скорость распространения радиосигнала;
t - время прохождения радиосигнала.
Для дальностей порядка D = 21000 км и скорости c = 300000 км/сек время прохождения сигнала t = 0,07 сек. Поэтому в аппаратуре потребителя должно быть обеспечено высокоточное измерение весьма малых промежутков времени.
Для определения времени прохождения радиосигнала от спутника до приемника сигналов использован метод сравнения псевдослучайных кодов, генерируемых в аппаратуре спутника и приемника СНС.
В самых общих чертах данный метод состоит в следующем. Аппаратура спутников и приемников синхронизирована с очень высокой точностью. И на спутниках, и в приемниках одновременно генерируются одинаковые последовательности весьма сложных цифровых кодов. Эти коды настолько сложны, что внешне выглядят как длинные цепочки случайных импульсов, которые принято называть псевдослучайными кодами. А так как аппаратура спутников и приемников генерирует одинаковые коды в одни и те же моменты времени, то время прохождения сигнала от спутника до приемника определяется по задержке принятого кода (рис. 4.2). Генерируемые псевдослучайные коды повторяются каждую микросекунду, т.е. через каждые
 сек.
сек.
Рис. 2.2. Измерение времени прохождения сигнала от спутника
Большинство СНС приемников обеспечивают измерение времени с точностью до Δt = 10-9 сек (т.е. до одной наносекунды).
Для высокоточного определения позиции ВС необходимо, чтобы точность синхронизации часов на спутниках и в аппаратуре потребителей соответствовала потребной точности измерения времени прохождения радиосигнала от спутника до приемника.
На спутниках устанавливаются комплекты из четырех высокоточных атомных часов и, кроме того, эти часы корректируются наземными станциями управления. В СНС приемниках устанавливаются сравнительно неточные кварцевые часы.
Погрешность определения момента времени t по часам приемника по сравнению с отсчетом на часах спутников определяется компьютером аппаратуры потребителя в результате вычисления по специальному алгоритму.
Предположим, что спутники и приемник СНС находятся в одной плоскости. Если t = 0, т.е. нет погрешностей в измерении времени прохождения радиосигнала одновременно от трех спутников, то линии положения пересекутся в одной точке. В тех же случаях, когда погрешность t , то вычисленные линии положения будут отстоять от фактических линий положения на величину ct и образовывать некоторую область возможных положений приемника СНС (область погрешностей). Размеры этой области определяются величиной ct и углами пересечения линий положения. По специальному алгоритму в компьютере приемника СНС после серии измерений обеспечивается вычисление величины t, которая становится третьей координатой, определяющей позицию приемника на плоскости (рис. 2.3).
Рис. 2.3. Влияние на определение позиции ВС погрешности во времени
Для вычисления погрешности в определении времени по часам приемника СНС и местоположения приемника СНС в пространстве (т.е. в системе трех координат) необходимо одновременное измерение расстояний до четырех спутников. При этом погрешность во времени t является некоторой четвертой координатой, и, следовательно, четыре поверхности положения в виде сфер с радиусами, равными соответствующим дальностям от четырех спутников, определяют некоторую область возможных положений приемника СНС.
Таким образом, для высокоточного определения позиции ВС в реальном масштабе времени необходимо сочетание многоканального приемника и быстродействующего компьютера. Приемник обеспечивает одновременный прием сигналов от четырех спутников, компьютер вычисляет погрешность часов t и координат приемника в выбранной системе координат.
В тех случаях, когда возможен прием сигналов только от трех спутников, то в алгоритмах аппаратуры потребителей СНС в качестве четвертого спутника принимается центр Земли, следовательно, одной поверхностью положения является сфера с радиусом, равным расстоянию от центра Земли до ВС (до приемника СНС). Расстояние от центра Земли до поверхности общеземного эллипсоида вычисляется компьютером аппаратуры потребителя СНС, а расстояние от поверхности эллипсоида до ВС (абсолютная высота) вводится в компьютер автоматизировано или вручную от бортовых систем ВС.
Высокоточное определение местоположения ВС возможно только при условии точного вычисления координат навигационных спутников на момент измерения расстояний до спутников. Рабочие орбиты спутников выбраны такими, чтобы была обеспечена высокая точность сохранения спутниками заданных орбит и периода обращения относительно центра Земли. Эфемериды спутников (параметры, определяющие их положение на орбите) определяются и уточняются с помощью наземного командно-измерительного комплекса. Информация об эфемеридах всех спутников в виде так называемого "альманаха" вводится в память компьютера аппаратуры потребителя СНС сигналов. И, следовательно, компьютер обеспечивается данными для вычисления координат спутников на любой момент времени. Но так как под воздействием гравитационных пульсаций Луны и Солнца и давления солнечного излучения на поверхность спутника возникают изменения в эфемеридах спутника, то на наземном командно-измерительном комплексе определяются эфемеридные ошибки, которые передаются на спутник. В сигналах, передаваемых спутником, содержится информация об эфемеридных ошибках данного спутника.
Данные об эфемеридах спутника, содержащиеся в альманахе, и информация об эфемеридных ошибках обеспечивают высокоточное вычисление координат спутника компьютером приемника СНС.
Возможная точность измерения расстояния до спутника оценивается суммарной средней квадратической погрешностью в определении расстояния до спутника
 = 5-10 м. Точность определения координат позиции приемника СНС определяется не только величинами погрешностей в измерении расстояний до спутников, но и взаимным расположением поверхностей положения приемника СНС, т.е. взаимным расположением спутников.
= 5-10 м. Точность определения координат позиции приемника СНС определяется не только величинами погрешностей в измерении расстояний до спутников, но и взаимным расположением поверхностей положения приемника СНС, т.е. взаимным расположением спутников.Предположим, что два спутника и приемник СНС расположены в одной плоскости (рис. 4.4). Обе линии положения определяются с погрешностью D. Тогда область возможного положения приемника СНС будет значительно меньше при угле пересечения линий положения, близком к (рис. 2.4 а), чем при угле пересечения, близком к (рис. 2.4 б). Возможная погрешность в определении координат за счет так называемого "геометрического фактора" может возрасти в несколько раз.
Рис. 2.4. Влияние на определение позиции ВС “геометрического фактора”
При измерении расстояний до четырех спутников погрешности D также определяют область возможного нахождения приемника СНС, и точность определения координат находится в большой зависимости от взаимного расположения спутников. Если в поле зрения антенны приемника СНС находится более четырех спутников, то по определенному алгоритму могут быть выбраны четыре спутника, взаимное расположение которых обеспечивает в данный момент наибольшую точность вычисления позиции ВС.
Для оценки влияния взаимного расположения спутников и приемника СНС на точность определения координат используется критерий GDOP – Geometric Delution of Precision (Геометрическое снижение точности, "геометрический фактор"). Геометрический фактор GDOP, как правило, обозначается аббревиатурой DOP (в некоторых приемниках СНС этот критерий обозначается PDOP - Position Delution of Precision).
Геометрическое снижение точности (GDOP) – относительная величина ошибки определения местоположения с помощью системы, формирующей несколько семейств боковых поверхностей положения. Точнее говоря, это - отношение среднеквадратической ошибки определения местоположения к среднеквадратическому значению ошибок измерения в предположении, что все составляющие ошибки измерения статистически независимы, имеют нулевое математическое ожидание и одно и то же стандартное распределение. GDOP представляет собой показатель совершенства, с точки зрения наблюдателя, геометрических характеристик расположения источников сигналов, формирующих указанные боковые поверхности положения. Низкое значение GDOP является желательным, высокое - нет.
Величина критерия DOP определяется из следующих соображений. Если позиции четырех спутников: S1, S2, S3, S4, и потребителя M (рис. 2.5) рассматривать как вершины многогранника, соединив их прямыми линиями, то будет очерчен некоторый объем V. И чем лучше взаимное расположение спутников для пеленгования, тем будет больше объем V такого многогранника, определяющий величину DOP.
Рис. 2.5. Многогранник, определяющий “геометрический фактор”
Величина критерия DOP принимается обратно пропорциональной объему V с учетом некоторого коэффициента пропорциональности k:
DOP = k /V.
Величина DOP, как правило, колеблется от единицы до 10. Считается, что при DOP 4 обеспечивается высокая точность определения позиции ВС. Используя сведения из Альманаха, компьютер в аппаратуре потребителя непрерывно вычисляет критерий DOP, определяя лучшую четверку, как правило, из шести-восьми спутников.
Средняя квадратическая радиальная погрешность в определении позиции ВС с учетом геометрического фактора может быть оценена по формуле:
где
 - средняя квадратическая радиальная погрешность при DOP = 1,0.
- средняя квадратическая радиальная погрешность при DOP = 1,0.За счет оптимального выбора для пеленгования четырех спутников из находящихся в поле зрения антенны, как правило, шести-восьми спутников, точность определения позиции ВС повышается в четыре-шесть раз.
Таким образом, высокая точность определения позиции приемника СНС обеспечивается на основе следующих основных принципов:
- использования в качестве первично определяемого навигационного параметра дальности до спутника;
- определения времени прохождения сигнала от спутника с помощью специального генерируемого на спутниках и в аппаратуре потребителя псевдокода;
- обеспечения точной синхронизации часов на спутниках и в аппаратуре потребителя;
- вычисления в аппаратуре потребителя с помощью Альманаха и эфемеридных поправок координат спутника;
- оптимального выбора спутников для пеленгования с учетом их взаимного расположения.
Очень важно представлять, что для определения места ВС желательно принимать сигналы тех спутников, которые выше горизонта. В этой связи существует понятие “угол маски”.
Угол маски. Фиксированный угол возвышения относительно горизонта пользователя, ниже которого спутники игнорируются программным обеспечением приемника. Углы маски применяются в основном при анализе характеристик GNSS и используются в некоторых моделях приемников. Угол маски определяется характеристиками приемника, мощностью передаваемого сигнала при малых возвышениях, чувствительностью приемника и допустимыми при малых возвышениях ошибками.
Минимальный применяемый угол маски. Минимальный угол возвышения спутника относительно горизонта пользователя, при котором данный спутник можно надежно использовать для навигационных расчетов. Изменение минимального применяемого угла маски зависит от окружающей среды, конструкции и размещения антенны, от высоты и углового положения воздушного судна.
Использование псевдослучайного кода в СНС обусловлено не только необходимостью обеспечения высокоточного измерения времени прохождения радиосигнала от спутника до приемника СНС, но и необходимостью принимать и обрабатывать очень слабые радиосигналы от спутника.
Сигналы от навигационных спутников настолько слабы, что не могут быть зарегистрированы на фоне естественного радиоизлучения Земли. Естественный радиошум Земли – это случайные вариации электронных пульсаций. В то время как принимаемый псевдослучайный код – это строго определенная последовательность электронных импульсов. А так как псевдослучайный код повторяется каждую микросекунду, то с помощью быстродействующего компьютера представляется возможным выполнять многократное сравнение принимаемых сигналов и выделять псевдослучайный код на фоне естественного радиошума Земли. В результате приемник СНС может иметь очень маленькую антенну, а в целом аппаратура потребителя сравнительно небольшие габариты и вес и, кроме того, относительно небольшую стоимость. А это, в свою очередь, способствует превращению СНС в систему массового использования.
Одна из важнейших причин применения псевдослучайного кода в СНС – это целесообразность использования всеми спутниками одной и той же несущей частоты в своих передатчиках. Но так как каждый спутник передает только ему присущий код, приемник легко может отличить сигналы конкретного спутника, и спутники не "забивают" друг друга, работая на одной и той же частоте.
Применение псевдослучайного кода в СНС позволяет также собственнику системы контролировать режим доступа к системе.
Так в американской GPS применяются два вида кодов:
- C/A-code (Clear/Acquisition-code – код свободного использования);
- P-code (Protected-code – защищенный код).
P-code засекречен и доступ к нему имеет только министерство обороны США. C/A-code является общедоступным. Но в процесс использования C/A-code может быть введен режим S/A (Selective Availability – ограниченного доступа), который предназначен для снижения точности пеленгования простым "загрублением" сигналов времени, передаваемых спутником. Может написать, что он действовал, а сейчас отменен?
Для повышения точности определения координат ВС, например, при выполнении захода на посадку, в СНС предусмотрен дифференциальный режим (см. п. 5.1).
2.2. Основные уравнения в алгоритмах СНС
Навигационный спутник вращается относительно центра масс Земли практически по круговой орбите высотой, примерно, 20000 км и его положение может быть указано относительно центра Земли, а позицию потребителя СНС сигналов необходимо указывать относительно поверхности Земли в принятой геодезической системе координат.
Положение навигационного спутника относительно центра масс Земли определяется в прямоугольной абсолютной геоцентрической системе координат OXYZ, связанной с текущими экватором и точкой весеннего равноденствия (рис. 2.6).
Рис. 2.6. Геоцентрические координаты спутника
Закон движения i-го навигационного спутника задается: прямоугольными координатами
 и скоростью их изменения
и скоростью их изменения  , относящимися к некоторому определенному моменту времени
, относящимися к некоторому определенному моменту времени  . Если известны силы, действующие на спутник, то могут быть составлены уравнения движения спутника. И, следовательно, для любого момента времени t координаты i-го спутника и скорости их изменения могут быть определены в результате интегрирования уравнений движения спутника при некоторых начальных условиях.
. Если известны силы, действующие на спутник, то могут быть составлены уравнения движения спутника. И, следовательно, для любого момента времени t координаты i-го спутника и скорости их изменения могут быть определены в результате интегрирования уравнений движения спутника при некоторых начальных условиях.В результате определения дальности
 до i-го спутника может быть составлено следующее уравнение (рис. 4.7):
до i-го спутника может быть составлено следующее уравнение (рис. 4.7):
где:
 – координаты приемника СНС относительно центра масс Земли;– координаты i-го спутника относительно центра масс Земли.
– координаты приемника СНС относительно центра масс Земли;– координаты i-го спутника относительно центра масс Земли.
Рис. 4.7. Геоцентрические координаты спутника и ВС
Предполагая, что погрешность в измерении времени прохождения сигнала от спутника до приемника СНС t = 0, по результатам приема сигналов от трех спутников может быть составлена система из трех уравнений:
 (2.1)
(2.1)и определены координаты x, y, z потребителя СНС сигналов относительно центра масс Земли. Затем геоцентрические прямоугольные координаты переводятся в геодезические.
Связь координат x, y, z с широтой B, долготой L и высотой Н может быть задана следующей системой уравнений:
 (2.2)
(2.2)где: x, y, z – прямоугольные координаты;
В, L, Н – геодезические координаты (соответственно широта и долгота, рад, и высота, м);
N – радиус кривизны первого вертикала, м;
е – эксцентриситет эллипсоида.
Значения радиуса кривизны первого вертикала и квадрата эксцентриситета эллипсоида вычисляют соответственно по формулам:
 (2.3)
(2.3) (2.4)
(2.4)где: а – большая полуось эллипсоида, м;
a – сжатие эллипсоида.
Уравнения (2.1) и (2.2) только в общих чертах характеризуют алгоритмы, решаемые в вычислителях бортовой аппаратуры СНС. Кроме того для определения координат СНС приемника должна быть вычислена погрешность в измерении времени t прохождения сигнала от спутников до приемника СНС.
При определении места ВС с использованием GPS задача решается во всемирной геодезической системе координат 1984 г. (WGS-84 – World Geodetic System – 1984), а при использовании ГЛОНАСС – в системе геодезических координат Параметры Земли 1990 г., версия 2000 г.
На рис. 2.1 представлена графическая интерпретация, отличия координат WGS-84 от ПЗ-90.02 (в горизонтальном плане) из которой видно, что при определении местоположения в системе координат WGS-84 они будут отличаться от координат в системе координат ПЗ-90.02 максимум на 0.5 м в районе Калининграда и в этой связи их можно практически считать идентичными.
При осуществлении точного захода на посадку (с вертикальным наведением) с использованием СНС необходимо учитывать волну геоида для посадочного порога ВПП в связи с тем, что высота ВС определяется в системе координат WGS-84 или ПЗ-90.02, а посадку ВС производит на ВПП, абсолютная высота которой отсчитывается от среднего моря, т.е. от геоида.
Авиационные спутниковые навигационные системы обеспечивают не только определение координат места ВС, но и определение путевого угла и путевой скорости ВС. Для определения путевого угла и путевой скорости измеряется сдвиг частот в сигналах от каждого спутника.
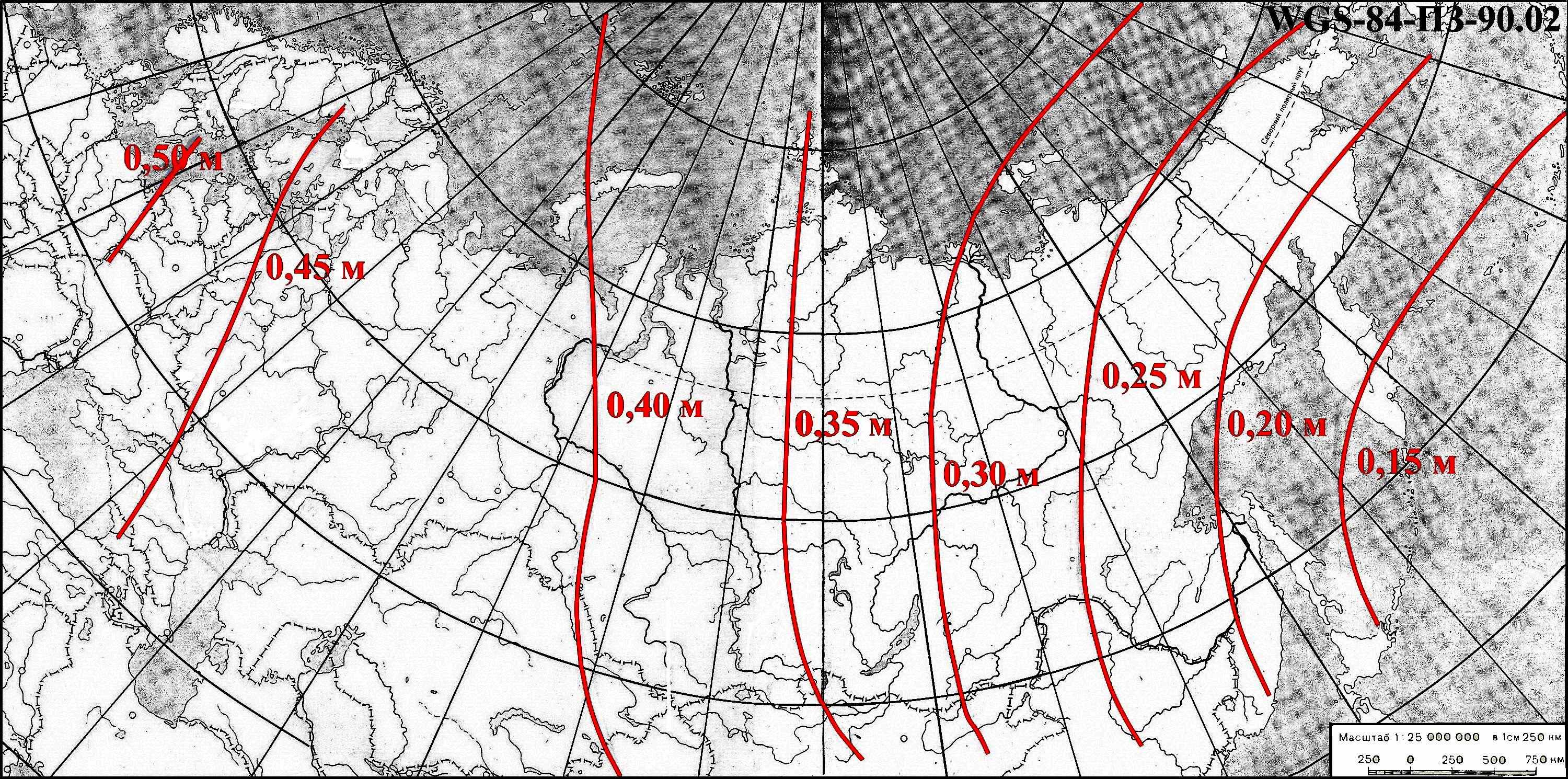
Рис. 2.1. Графическая интерпретация отличия координат ПЗ-90.02 от WGS-84
Полный алгоритм определения координат, путевой скорости и путевого угла воздушного судна (потребителя СНС сигналов) обеспечивает:
- вычисление с помощью Альманаха и эфемеридных поправок расчетных значений координат каждого из четырех спутников:и скоростей изменения этих координат:;
- измерение времени
 прохождения сигнала от спутников;
прохождения сигнала от спутников;
- вычисление погрешностей
 в измерении времени прохождения сигналов от спутников;
в измерении времени прохождения сигналов от спутников;
- вычисление расстояний
 до спутников;
до спутников;
- вычисление геодезических координат широты и долготы воздушного судна, а также путевой скорости и путевого угла ВС.
В тех случаях, когда аппаратурой потребителя "захвачены" только три спутника и, следовательно, высота приемника СНС относительно среднего уровня моря вводится вручную или автоматически (в навигационных комплексах), то радиальная ошибка в позиции ВС может в два раза превышать ошибку в высоте. Так, например, если абсолютная высота введена с ошибкой
 = 100 м, то радиальная погрешность в позиции ВС может достигнуть величины σr = 200 м.
= 100 м, то радиальная погрешность в позиции ВС может достигнуть величины σr = 200 м.Фактические путевой угол и путевая скорость могут быть определены с высокой точностью только в тех случаях, когда скорость приемника СНС (скорость ВС) превышает 30 узлов (55,6 км/ч). При этом средняя квадратическая погрешность в определении фактической путевой скорости, примерно,
 = 0,1 узла (0,2 км/ч).
= 0,1 узла (0,2 км/ч).2.3. Основные преимущества СНС
Одним из основных направлений использования искусственных спутников Земли в авиации является их применение для навигации воздушных судов (ВС). СНС обладают рядом преимуществ перед традиционными радиотехническими системами (РТС) навигации:
- большая высота полета ИСЗ позволяет создать глобальную зону действия радиотехнических средств, установленных на спутниках, при использовании достаточно простых антенных устройств, как на спутнике, так и на ВС;
- с помощью созвездия ИСЗ обеспечивается создание навигационной системы, охватывающей территорию земного шара;
- нахождение спутника в пределах прямой видимости в любой точке зоны действия его радиотехнических средств позволяет использовать наиболее помехоустойчивые диапазоны радиоволн и передавать сигналы с наименьшими искажениями;
- обеспечивается практически неограниченная пропускная способность СНС;
- обеспечивается относительная простота и дешевизна бортового оборудования СНС на ВС, обусловленная отсутствием передатчика и современными технологиями обработки сигналов;
- возможно при дальнейшем развитии СНС комплексное использование спутниковых систем для решения задач навигации, связи и наблюдения.
Навигационные спутники в современных СНС, используемых для целей навигации, находятся практически на круговых орбитах высотой порядка 20000 км. Установлено, что при движении спутников на таких высотах силы, действующие на спутники и создающие отклонения от расчетных орбит, отличаются высокой стабильностью, что позволяет точно прогнозировать движение ИСЗ на несколько месяцев вперед.
Отмеченные достоинства СНС позволяют, при их внедрении, существенно облегчить решение ряда задач по обеспечению воздушного движения. Наиболее важными из них являются:
- повышение уровня безопасности полетов;
- повышение точности навигации, особенно в районах со слаборазвитой структурой наземного оборудования навигационных РТС и над водными пространствами;
- уменьшение интервалов эшелонирования ВС и увеличение пропускной способности воздушного пространства;
- спрямление воздушных трасс.
Помимо косвенной выгоды за счет повышения точности и надежности навигации ВС значительно снижаются прямые расходы государств по обеспечению воздушного движения.
Ввиду неоспоримых технических и экономических преимуществ спутниковых систем ИКАО было принято решение о создании всемирной спутниковой системы связи, навигации, наблюдения и организации воздушного движения – CNS/ATM (Communication, Navigation and Surveillance /Air Traffic Management) с использованием глобальной навигационной спутниковой системы GNSS, функционирующей на основе GPS и ГЛОНАСС. Специально созданным комитетом ИКАО была разработана концепция будущих аэронавигационных систем CNS/ATM. По масштабу производимых изменений переход к системам CNS/ATM является самой крупной программой, которую когда-либо приходилось решать авиационному сообществу.
Предполагается, что GNSS постепенно заменит все навигационные системы, используемые в настоящее время и станет единственным средством, обеспечивающим навигацию на всех этапах полета, включая обеспечение точного захода на посадку.
Разработанная ИКАО концепция Performance base navigation (PBN) – навигация, основанная на характеристиках, определяют требования к точности выдерживания навигационных параметров на различных этапах полета и в различных районах воздушного пространства в контексте активного использования GNSS.
Внедрение CNS/ATM кроме непосредственного использования GNSS предполагает использование целого ряда функциональных расширений, как локального, так и глобального типа. Так, например, предполагается использование геостационарных спутников, не входящих в состав GNSS, для обеспечения наблюдения и связи в отдельных районах. Также предполагается использование дифференциального режима GNSS, значительно повышающего точность навигации и позволяющего выполнять точные заходы на посадку по III категории.