
Разработана схема механизма самонастройки, позволяющего вести его оперативную переналадку на обработку рыб различных видов
| Вид материала | Документы |
Содержание14, и выходное звено, которым является подвижный корпус 15, кинематически связанный с кулачком 14 Список литературы |
- Урок по теме: многообразие рыб. Класс костные рыбы. Цель, 59.64kb.
- Задачи расширить знания школьников об особенностях организации рыб как водных позвоночных;, 35.61kb.
- Лекция 12 Тема: Состав и количество основного оборудования в непоточном производстве, 602.73kb.
- Основные группы рыб, их роль в природе и практическое значение, 29.02kb.
- Характеристики отрядов, подотрядов и семейств рыб, их многообразие в зависимости, 587.95kb.
- Конспект открытого урока биологии в 7 классе по теме: «класс хрящевые рыбы», 48.22kb.
- Программа "1С: Бухгалтерия 8" позволяет вести: Учет хозяйственной деятельности нескольких, 49.27kb.
- Методика комплексной оценки состояния сообществ и популяций доминирующих видов или, 1278.81kb.
- Урок по теме «Многообразие рыб», 183.29kb.
- Он работает в области производства различных видов флоат-стекла и стеклоизделий, 10.91kb.
УДК 664.95
РАЗРАБОТКА И АНАЛИЗ МЕХАНИЗМА ДЛЯ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ НОЖА РЫБОРАЗДЕЛОЧНОЙ МАШИНЫ
А.С. Горлатов, М.А. Вайшвилас
Многообразию технологических операций при разделке рыб различных видов соответствует большое число механизмов, обеспечивающих автоматическую настройку (самонастройку) рабочих органов на размеры обрабатываемого сырья. Использование в новых рыборазделочных машинах известных и хорошо зарекомендовавших себя механизмов самонастройки рабочих органов - это аспект не только экономический, но и социальный. Разработана схема механизма самонастройки, позволяющего вести его оперативную переналадку на обработку рыб различных видов.
рыба, рабочий орган, настройка, биологический коэффициент, производительность
Известны кинематические схемы ряда механизмов настройки рабочих органов рыборазделочных машин, используемых при разделке рыб различных видов [1 - 7]. Основным недостатком данных систем настройки рабочих органов является усложненность их обмеряющих, передающих и настраивающих (исполнительных) механизмов, содержащих большое число подвижных звеньев (движущихся масс) и кинематических пар. Это снижает точность настройки рабочих органов, ограничивает скорости движения звеньев, уменьшает частоту повторения рабочих циклов и производительность рыборазделочных машин.
В машине проекта 407 для разделки сельди используется устройство, реализующее косвенный метод измерения - зависимость между длиной головы и толщиной рыбы в плоскости линии резания [3]. Устройство содержит обмеряющий механизм в виде укрепленного на оси одноплечего рычага - скользящей планки для измерения толщины рыбы, движущейся в кассетах транспортера, передающий механизм в виде рычага с роликом, укрепленного на оси обмеряющего рычага, исполнительный механизм в виде поворотного кронштейна с корпусом для вала с укрепленным на валу рабочим органом - ножом и привод. Основным недостатком устройства является то, что при взаимодействии с рыбой вращающийся дисковый нож занимает положение, при котором плоскость ножа, а следовательно, и плоскость резания, оказывается под острым углом относительно хребтовой кости обрабатываемой рыбы. Другими словами, непосредственно при отрезании головы каждого экземпляра обрабатываемой рыбы не обеспечивается перпендикулярного положения ножевого диска и хребтовой кости рыбы. Это связано с тем, что при настройке нож совершает движение по дугообразной траектории, кривизна которой зависит от длины поворотного кронштейна. Такое положение плоскости резания приводит к потерям пищевого рыбного сырья. Вместе с головами рыб в отходы идет часть пищевого сырья, при этом потери сырья растут с увеличением длины обрабатываемой рыбы.
Более предпочтительным с точки зрения возможности значительного уменьшения потерь пищевого сырья при обработке рыбы является механизм автоматической настройки рабочего органа, описанный в работе [7]. Однако переналадка такого механизма на обработку рыбы других видов несколько усложнена.
Разработанное устройство для автоматической настройки ножа рыборазделочной машины содержит обмеряющий механизм 1, передающий механизм 2, исполнительный механизм 3 и привод 4 (рисунок).
Обмеряющий механизм 1 включает вертикально расположенный толкатель 5, зубчатую рейку 6, щуп 7 и силовой упругий элемент 8. Толкатель 5 установлен в неподвижных направляющих 9, рейка 6 жестко укреплена на толкателе, силовой упругий элемент 8 выполнен в виде пружины растяжения, один конец которой укреплен на толкателе, другой -на направляющей 9. На толкателе 5 укреплен пластинчатый ограничитель 10 с продольным пазом 11 для фиксирования толкателя в заданном нижнем положении, при котором щуп 7
отстоит от поверхности дна кассеты транспортера на расстоянии, равном толщине рыбы минимальной длины. Фиксированное положение ограничителя 10 на толкателе обеспечивается посредством пальца с резьбовым концом, сопрягаемого с пазом 11 в теле ограничителя и с резьбовым отверстием в толкателе. При отсутствии рыбы под щупом 7, либо при нахождении под щупом рыбы минимальной длины, пружина 8 поднимает ограничитель 10 к неподвижной направляющей 9, при этом толкатель оказывается в нижнем положении.
Передающий механизм 2 включает цилиндрическое зубчатое колесо 12, укрепленное на конце вала 13, при этом колесо 12 сопряжено с зубчатой рейкой 6 толкателя 5 обмеряющего механизма, на другом конце вала 13 укреплен дисковый кулачок 14, рабочий профиль которого выполнен в виде Архимедовой спирали.
Исполнительный механизм 3 включает ведущее звено, которым является укрепленный на валу 13 передающего механизма кулачок 14, и выходное звено, которым является подвижный корпус 15, кинематически связанный с кулачком 14 посредством ролика 16, смонтированного на корпусе и сопряженного с рабочим профилем 17 кулачка 14. Корпус 15 выполнен пустотелым, внутри корпуса соосно его продольной оси размещен трубчатый ножевой вал 18, смонтированный в двух подшипниках качения, установленных по концам корпуса. На одном конце вала 18 укреплен рабочий орган - дисковый нож 19, другой конец вала подвижно сопряжен с концом вала привода.
Подвижный корпус 15 смонтирован в прямолинейных направляющих, каждая из которых содержит укрепленное на стойке нижнее основание 20 и укрепленное на наружной поверхности корпуса 15 верхнее основание 21, сопряженные между собой посредством тел качения. По длине оснований выполнены канавки для тел качения, при этом канавки 22 нижнего основания выполнены глухими (тупиковыми), а канавки 23 верхнего основания - сквозными.
Сопряжение ножевого вала 18 с валом привода 4 включает шлицевые зубья на внутренней поверхности в концевой части ножевого вала и продольные канавки, выполненные в концевой части вала привода для шлицевых зубьев ножевого вала.
Устройство для автоматической настройки ножа рыборазделочной машины работает следующим образом.
Предварительно устанавливают пластинчатый ограничитель 10 в положение, при котором расстояние между щупом 7 и поверхностью дна кассеты будет равным толщине рыбы минимальной длины. Рыба укладывается в кассеты транспортера с упором в планку так, чтобы ее приголовок при обмере оказался под щупом. При работе привода 4 ножевой вал 18 обеспечивает вращение дискового ножа 19 с частотой близкой к п = 10с-1 (600 об/мин).
При обработке рыбы минимальной длины вращающийся дисковый нож не совершает поступательного движения, поскольку он предварительно установлен на линию реза рыбы такой длины, а щуп при этом не взаимодействует с рыбой. В результате отрезанию головы рыбы минимальной длины не предшествует поступательное движение ножа.
При обработке рыбы, длина которой больше минимальной, щуп взаимодействует с рыбой по всей его длине, при этом вал 18 с ножом совершает поступательное движение, и в момент окончания взаимодействия щупа с рыбой нож оказывается на линии отрезания головы данного экземпляра рыбы. По окончании реза взаимодействие ножа с рыбой прекращается, пружина 8 возвращает толкатель 5 в крайнее нижнее положение, при этом система рейка 6 - колесо 12 - вал 13 - кулачок 14 обеспечивает возвращение подвижного корпуса 15 с валом 18 и ножом 19 в начальное положение.
В процессе отрезания головы рыбы положение ножа на линии резания обеспечивается влиянием на его боковые поверхности усилий от массы обрабатываемой рыбы, занимающей фиксированное положение в кассете транспортера. По окончании реза действие этих сил прекращается, при этом сила пружины 8 становится достаточной для возвращения толкателя 5 в крайнее нижнее положение.
В разработанном устройстве реализуется косвенный метод измерения, в соответствии с которым длину головы рыбы определяют по толщине рыбы в месте ее приголовка. Метод базируется на постоянстве отношений между отдельными частями тела рыбы одного вида [ 1-3]. В соответствии с этим обмер рыбы ведут по ее толщине, а нож настраивают на линию резания по длине головы. Численно эти параметры не являются равными, но их отношения для рыб одного вида оказываются постоянными. Так, например, для сельди североатлантической свежей имеем
 ( 1)
( 1)где
 - биологический коэффициент; Н - толщина рыбы в месте приголовка;
- биологический коэффициент; Н - толщина рыбы в месте приголовка;  - длина головы рыбы.
- длина головы рыбы.В разработанном устройстве преобразование значения толщины рыбы, полученного в результате ее обмера, в соответствующее значение длины головы обеспечивается передающим и исполнительным механизмами. Линейный ход ножевого вала 18 не равен линейному ходу толкателя 5. Из зависимости (1) следует, что ход ножевого вала с рабочим органом должен быть равен
 Если принять толщину тела рыбы 3,8 см, то ход ножевого вала должен составлять
Если принять толщину тела рыбы 3,8 см, то ход ножевого вала должен составлять  см.
см.При подаче под щуп рыбы, длина которой больше минимальной, толкатель 5 с рейкой 6 совершает подъемное движение, угол поворота зубчатого колеса 12 при этом соответствует выражению
где
 - угол поворота зубчатого колеса 12, соответствующий ходу толкателя 5;
- угол поворота зубчатого колеса 12, соответствующий ходу толкателя 5;  - подъем (ход) толкателя; D - диаметр делительной окружности зубчатого колеса 12.
- подъем (ход) толкателя; D - диаметр делительной окружности зубчатого колеса 12.Поскольку колесо 12 и кулачок 14 занимают на валу 13 фиксированное положение, их углы
поворота будут равновеликими. Ведущий кулачок 14 при повороте на угол обеспечивает ход подвижного корпуса с ножевым валом на величину  .
.Это условие обеспечивается, поскольку в интервале поворота кулачка на угол
радиус-векторы его рабочего профиля, выполненного в виде Архимедовой спирали, линейно увеличиваются на величину биологического коэффициента .Следовательно, зная диаметр зубчатого колеса 12 и значение биологического коэффициента
, можно оперативно выполнить переналадку разработанного устройства на обработку рыб других видов. Переналадка предполагает наличие (набор) кулачков, рабочие профили которых выполнены для различных значений коэффициента , т. е. для рыб различных видов.Применение разработанного устройства в рыбообработке обеспечит повышение точности настройки ножей рыборазделочных машин, уменьшит потери пищевого рыбного сырья. Устройство применимо для обработки рыб различных видов.
СПИСОК ЛИТЕРАТУРЫ
1. Пазенко В.Т, Механизмы настройки рабочих органов рыборазделочных машин / В.Т. Пазенко // M: Пищ. пром-сть, 1966. - 64 с.
2. Терентьев А.В. Основы комплексной механизации обработки рыбы / А.В. Терентьев. - М.: Пищ. пром -сть, 1969. - 434 с.
3. Романов А.А. Основные направления создания и совершенствования рыборазделочных машин. Обзорная информация. Сер. 4. ТОРП / А.А. Романов. - М., 1974. Вып. 2. - 86 с.
4. Горлатов А.С. Расчет механизма автоматической настройки ножа рыборазделочной машины / А.С. Горлатов // Материалы XXXVIII юбилейной отчетной науч. конф. за 1999 год. Часть 2. Секция процессов, машин и аппаратов хим. и пищ. произв. / ВГТА, Воронеж, 2000. - С. 84-90.
5. Горлатов А.С. Расчет механизма автоматической настройки рабочего органа рыборазделочной машины / А.С. Горлатов // Становление современной науки – 2006: I междунар. науч.-практ. конф. - Т. 1. Технические науки: материалы.- Днепропетровск: Наука и образование, 2006. - С. 8-14.
6. Горлатов А.С. Графоаналитический расчет механизма автоматической настройки ножа рыборазделочной машины на линию реза обрабатываемой рыбы /А.С. Горлатов// Научное обозрение. - М.: Наука, 2006. - № 6. - С. 36-41.
7. Горлатов А.С. Разработка и анализ механизма для автоматической настройки рабочего органа рыборазделочной машины / А.С. Горлатов, М.А. Вайшвилас // Известия КГТУ. - 2009. - № 15. - С. 96-101.
INVESTIGATION, DEVELOPMENT AND CALCULATION OF MECHANISM FOR AUTOMATIC TUNING OF KNIFEOF FISH DRESSING
A.S. Gorlatov, M.A. Vaishvilas
Large number of machinery provided with automatic tuning (self- tuning) of working members on dimensions of work raw materials to the technological process variety during dressing of different kinds of fish. Using in fish dressing machine famous and tried-and-trie machinery for self tuning of working members- it is not only an economic aspect, but also a social. Mechanism scheme was developed, was received relations permissive it is revamping to process different kinds of fish.
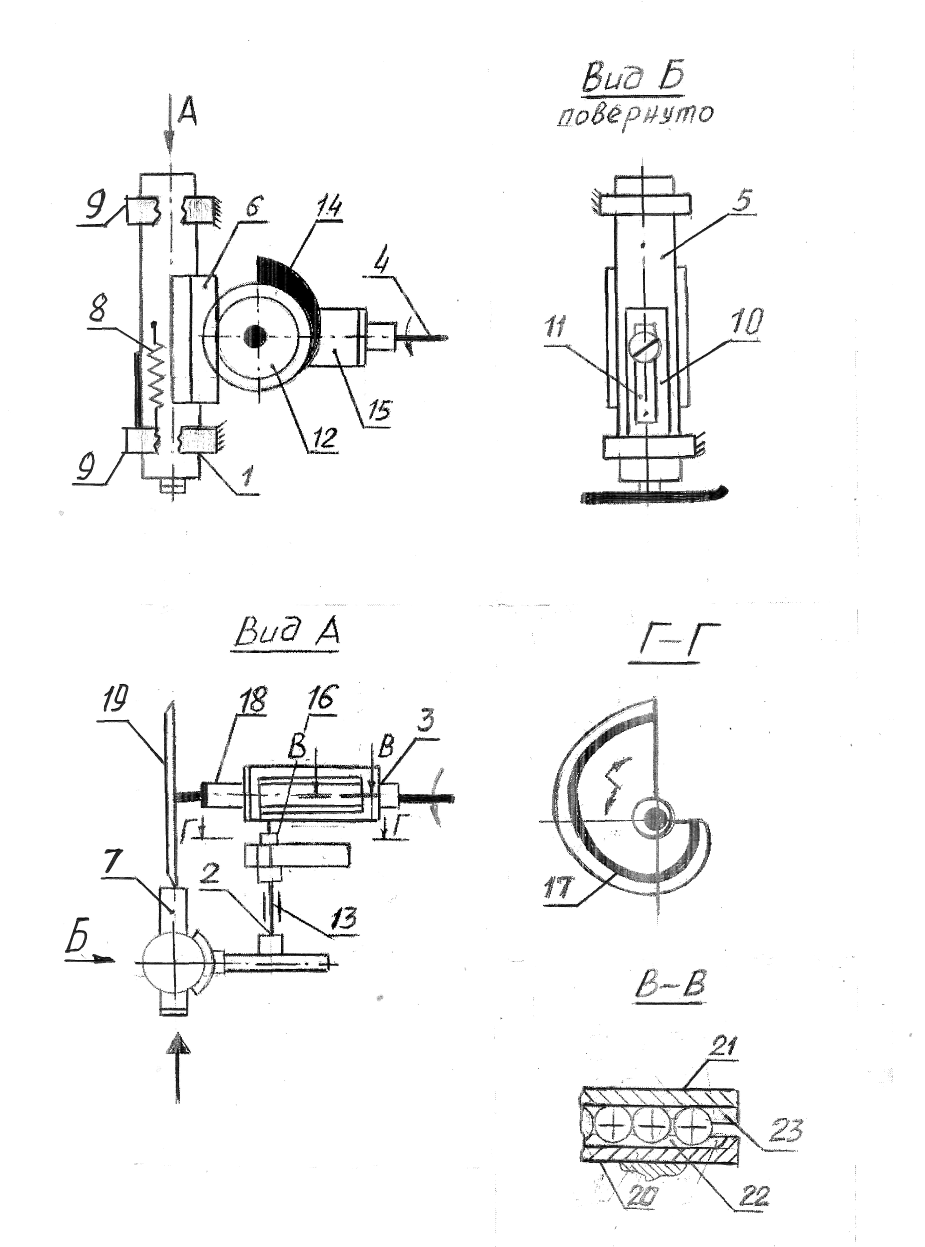
Рис. Кинематическая схема устройства для автоматической настройки ножа рыборазделочной машины