
Предложены критерии качества алгоритмов обнаружения смены состояния в динамических системах
| Вид материала | Документы |
Содержание1 вероятности для дополнительной 2 Список литературы |
- Юркевич Валерий Дмитриевич лекции, 22.95kb.
- Системы обнаружения утечек из трубопроводов, 170.88kb.
- А. А. Грабко научный руководитель В. С. Горбатов, к т. н., доцент Московский инженерно-физический, 29.26kb.
- Тарасюк А. П., Спасский, 109.74kb.
- 1 Анализ динамических процессов систем управления, 45.71kb.
- Темы рефератов по курсу: Критерии приемлемости риска, 54.24kb.
- «Критерии оценки защищенности информации в компьютерных системах от несанкционированного, 187.64kb.
- Математическое моделирование динамических процессов на горных склонах (снежные лавины,, 9.02kb.
- Учебная программа профилирующей дисциплины теория автоматического управления, 36.13kb.
- Петербургский Государственный Университет Телекоммуникаций имени профессора М. А. Бонч-Бруевича, 727.89kb.
Критерии эффективности алгоритмов обнаружения манёвров динамических объектов
А
.В. СОРОКИН, С.Ю. САМСОН1, Ю.Г. ДРЕВС
Московский инженерно-физический институт (государственный университет)
1ОАО “Московский научно-исследовательский институт
приборной автоматики”
КРИТЕРИИ ЭФФЕКТИВНОСТИ АЛГОРИТМОВ ОБНАРУЖЕНИЯ МАНЁВРОВ ДИНАМИЧЕСКИХ ОБЪЕКТОВ
Предложены критерии качества алгоритмов обнаружения смены состояния в динамических системах. На примере задачи обнаружения манёвра объектов, сопровождаемых по радиолокационным измерениям, выработано четыре критерия эффективности алгоритмов обнаружения. Описана методика применения разработанных критериев при решении задач сравнительного анализа и оптимизации алгоритмов обнаружения манёвра. Приведён пример оптимизации конкретного алгоритма обнаружения манёвра при помощи имитационного моделирования.
При решении задач обработки информации о воздушных объектах в радиолокационных системах требуется определять, маневрирует цель или нет. Решающее правило, с помощью которого определяется момент начала и конца манёвра, если манёвр действительно происходит, носит название алгоритма обнаружения манёвра [1]. Решение принимается на основе дискретной выборки измерений координат цели. Для сравнительного анализа существующих и синтеза новых алгоритмов обнаружения манёвров необходимо руководствоваться некоторыми численными критериями их оценки [2]. Однако в настоящее время в литературе не удалось найти определённых критериев эффективности алгоритмов обнаружения манёвров динамических объектов. В представляемой работе предложена система критериев эффективности, позволяющая производить рациональный анализ и синтез алгоритмов обнаружения манёвров.
Качество обнаружения манёвра, проводимого в соответствии с определённым алгоритмом, зависит от условий сопровождения воздушного объекта (положения, скорости движения, интенсивности маневрирования объекта, характеристик ошибок измерения его параметров). Поэтому разрабатываемые критерии должны характеризовать эффективность алгоритма относительно конкретных условий сопровождения.
Очевидно, что в основе критериев эффективности алгоритмов обнаружения должна лежать минимизация частоты выдачи алгоритмом неправильных решений о факте маневрирования в заданный момент времени. Проблема разработки критериев обусловлена тем, что при одних и тех же условиях сопровождения вероятность неправильного решения по моментам фактического начала маневрирования и по моментам начала движения без манёвров (переходные участки сопровождения) зависит от времени и является большей, нежели вероятность для установившихся участков. На рис. 1 представлен пример временной зависимости вероятности признака «манёвр» на выходе обнаружителя
 . Для переходных участков сопровождения сравнительно высока вероятность неправильных решений по нескольким соседним моментам времени, а следовательно, случаются задержки в обнаружении начала и окончания манёвра. Из сказанного следует, что ошибки обнаружения манёвра по моментам, с
. Для переходных участков сопровождения сравнительно высока вероятность неправильных решений по нескольким соседним моментам времени, а следовательно, случаются задержки в обнаружении начала и окончания манёвра. Из сказанного следует, что ошибки обнаружения манёвра по моментам, с 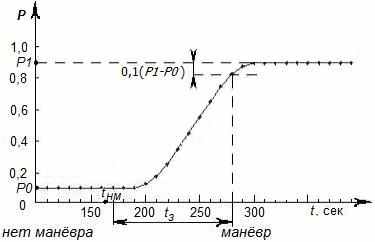
Рис. 1. Определение задержки обнаружения
оответствующим различным участкам траектории, обладают разными характеристиками. Поэтому требовалось выработать правило, при помощи которого оценки характеристик ошибок по различным участкам можно свести к одному или нескольким критериям. Отметим, что критерии, традиционно применяемые в задачах проверки статистических гипотез [3], не могут быть использованы здесь в полной мере. Это обусловливается тем, что данные критерии не учитывают случаи проверки гипотез по переходному участку, для которого статистические характеристики выборки зависят не только от определяемого состояния характеристики системы в заданный момент времени (факт наличия манёвра), но и от её состояния в предыдущие или последующие моменты времени.
Анализируя поставленную таким образом задачу, были приняты во внимание следующие факты:
- как правило, отсутствуют априорные сведения о соотношениях между длительностями манёвров воздушных объектов и длительностями участков без манёвра и о соотношениях между длительностями переходных участков сопровождения и длительностями установившихся;
- невозможно сопоставить значимость правильности обнаружения манёвров для различных участков сопровождения, которые зависят от характера использования результатов работы обнаружителя;
- показатели ошибок обнаружения, взятые в отдельности для участков наличия, отсутствия манёвров, начала манёвра и движения без манёвра, лучше одной обобщённой величины отражают сущность процесса обнаружения и характеризуют базовые свойства обнаружителя.
На основании данных утверждений было решено рассматривать систему четырёх самостоятельных критериев эффективности обнаружения манёвра:
- Вероятность ошибки первого рода (
 ).
).
- Вероятность ошибки второго рода (
 ).
).
- Показатель задержки обнаружения окончания манёвров (
 ).
).
- Показатель задержки обнаружения начала манёвров (
 ).
).
Вероятность ошибки первого рода
характеризует частоту выдачи алгоритмом ложной информации о наличии в некий момент времени манёвра при его фактическом отсутствии. Вероятность ошибки второго рода оценивает частоту выдачи ложной информации об отсутствии манёвра при его наличии. При определении данных вероятностей и рассматриваются только те моменты времени, которые достаточно удалены от момента смены вида движения, и для которых поэтому вероятность принятия обнаружителем неправильного решения не зависит от времени (установившиеся участки сопровождения) (см. рис. 1).Введённые показатели задержек обнаружения начала и окончания манёвров отражают эффективность обнаружения относительно моментов, соответственно, начала маневрирования и начала движения без манёвров. Они характеризуют вероятности неправильного решения для переходных участков и задержки в обнаружении начала и окончания манёвра.
Математически определять показатель задержки обнаружения предложено на основе временного ряда вероятностей решения о наличии в соответствующий момент времени манёвра. При этом за непосредственное время задержки
 принят временной отрезок от момента фактической смены типа движения (
принят временной отрезок от момента фактической смены типа движения ( или
или  ) до момента достижения вероятностью установившегося значения (см. рис. 1). Рассматривались различные варианты зависимостей показателя задержки от времени задержки, от средней вероятности неправильного решения на участке задержки и от установившихся вероятностей неправильного решения для предшествующего (
) до момента достижения вероятностью установившегося значения (см. рис. 1). Рассматривались различные варианты зависимостей показателя задержки от времени задержки, от средней вероятности неправильного решения на участке задержки и от установившихся вероятностей неправильного решения для предшествующего ( , рис. 1) и обнаруживаемого (
, рис. 1) и обнаруживаемого ( , рис. 1) типов движения. Формула показателя, при использовании которой достигалось наилучшее соответствие между соотношениями значений критериев и соотношениями экспертных оценок качества обнаружения для нескольких характерных временных рядов вероятности, выбрана для математического определения показателя задержки обнаружения. Она имеет следующий вид:
, рис. 1) типов движения. Формула показателя, при использовании которой достигалось наилучшее соответствие между соотношениями значений критериев и соотношениями экспертных оценок качества обнаружения для нескольких характерных временных рядов вероятности, выбрана для математического определения показателя задержки обнаружения. Она имеет следующий вид:  ,
,где

 – средняя вероятность неправильного решения на участке задержки;
– средняя вероятность неправильного решения на участке задержки;  – установившееся значение вероятности неправильного решения для обнаруживаемого типа движения;
– установившееся значение вероятности неправильного решения для обнаруживаемого типа движения;  – время задержки обнаружения начала/конца манёвра.
– время задержки обнаружения начала/конца манёвра.В общем случае, значения критериев зависят от положения цели и направления её движения и маневрирования относительно источника информации, а также от ошибок измерения. Каждый эксперимент по исследованию алгоритма обнаружения манёвра проводится на траектории, удовлетворяющей требуемому для исследования расположению и направлению движения цели и содержащей участки, позволяющие оценить искомые критерии эффективности алгоритма.
Следует стремиться к выбору траектории таким образом, чтобы временная зависимость вероятности признака «манёвр» на выходе обнаружителя
 была константной для участка траектории одного типа вне интервала задержки обнаружения. Пример такой зависимости представлен на рис. 2. В этом случае можно использовать более простую, первую, схему расчёта оценок критериев. Вычисления производятся на основе оценок величин, приведённых на графике, k – индекс порядкового номера манёвра воздушного объекта.
была константной для участка траектории одного типа вне интервала задержки обнаружения. Пример такой зависимости представлен на рис. 2. В этом случае можно использовать более простую, первую, схему расчёта оценок критериев. Вычисления производятся на основе оценок величин, приведённых на графике, k – индекс порядкового номера манёвра воздушного объекта.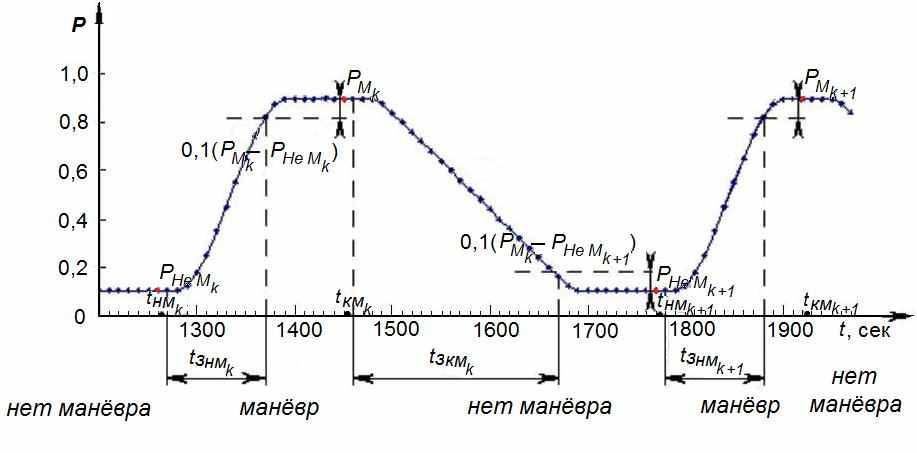
Рис. 2. Расчёт критериев качества обнаружителя по первой схеме
Е
сли для рассматриваемой траектории вероятность признака манёвра на выходе обнаружителя изменяется от донесения к донесению, то определить конец переходного участка на основании получаемой зависимости
затруднительно, так как после завершения переходного процесса вероятность признака манёвра на выходе обнаружителя продолжает изменяться. Поэтому используется вторая схема расчёта с построением вспомогательной траектории 2 движения цели (рис. 3, а). Вторая часть этой траектории 2 совпадает с той частью исходной траектории 1, по которой движется объект после смены типа движения. Первая же часть вспомогательной траектории 2 соответствует тому же типу движения (манёвр/не манёвр), что и вторая её часть, и обладает теми же параметрами движения. Время задержки рассчитывается как временной отрезок от момента фактической смены типа движения до момента достижения вероятностью для исходной траектории 1 вероятности  для дополнительной 2 (рис 3, б).
для дополнительной 2 (рис 3, б).
Рис. 3. Расчёт критериев качества обнаружителя по второй схеме: а – вспомогательная траектория,
б – временные зависимости вероятностей для исходной и вспомогательной траекторий
Методика проведения отдельного эксперимента по оценке качества обнаружителя манёвра включает в себя:
- формулирование требований к условиям сопровождения воздушного объекта для оценки данных критериев качества обнаружения;
- задание траектории, содержащей участки, удовлетворяющие этим требованиям;
- проведение исследований на заданной траектории и получение выходных данных по работе обнаружителя;
- получение на основе этих данных временной зависимости вероятности появления на выходе обнаружителя сигнала о наличии манёвра;
- расчёт необходимых критериев качества работы обнаружителя на основе временной зависимости в соответствии с первой либо второй расчётной схемой.
Выполняя данную последовательность действий для различных параметров алгоритма и условий сопровождения, можно получить набор оценок четырёх критериев, позволяющий провести сравнительный анализ либо оптимизацию алгоритма обнаружения манёвра.
Выработанные критерии и методика их применения были использованы для нахождения рациональных значений параметра алгоритма обнаружения, основанного на оценивании отклонения курса движения. Вначале множество всевозможных комбинаций расстояний от источника информации до воздушного объекта с направлением движения объекта было разбито на 10 групп, для которых каждый из критериев обладает близкими значениями. Для одной из групп при помощи имитационной модели [4,5] были найдены рациональные значения параметра алгоритма. Поиск производился путём экспериментального оценивания критериев в соответствии с разработанной методикой для различных значений параметра, сопоставления полученных значений критериев и выбора на его основе наиболее подходящего значения параметра алгоритма.
Разработанные критерии и методика их оценки могут использоваться не только применительно к задаче обнаружения манёвра, но и для исследования любого алгоритма проверки статистических гипотез относительно состояний динамического объекта в различные моменты времени.
СПИСОК ЛИТЕРАТУРЫ
- Фарина А. Цифровая обработка радиолокационной информации. Сопровождение целей /
А. Фарина, Ф. Студер; пер. с англ. М.: Радио и связь, 1993.
- Вентцель Е.С. Введение в исследование операций / Е.С. Вентцель. М.: Сов. радио, 1964.
- Левин Б.Р. Теоретические основы статистической радиотехники / Б.Р. Левин. – 3-е изд., переработ. и доп. М.: Радио и связь, 1989.
- Сорокин А.В. // Научная сессия МИФИ – 2008. Сборник научных трудов. М., Т. 13 : Автоматизированные системы обработки информации и управления. – 2008. С. 53.
- Сорокин А.В. // Вопросы радиоэлектроники. Сер. СОИУ. 2009. Вып. 1. С. 60.
I
SBN 978-5-7262-1179-4. НАУЧНАЯ СЕССИЯ МИФИ-2009. Том V