
Управление судном при плавании во льдах
| Вид материала | Документы |
- Особенности плавания судна во льдах. Общее положение, 44.54kb.
- Курсовая работа по управлению судном, 128.72kb.
- Рабочая программа итоговой государственной аттестации выпускников для специальности, 240.91kb.
- Василий И. Снопков Россия, Санкт-Петербург Март 18. 2010 Управление судном в шторм,, 110.35kb.
- Курс и скорость судна при плавании в штормовых условиях зависит от мореходных качеств, 24.09kb.
- Предотвращение загрязнения нефтью с судов при плавании в особых районах, 73.46kb.
- Конспект лекций по курсу «управление качеством», 1507.97kb.
- Конспект лекций по курсу «управление качеством», 1487.57kb.
- Курсовая работа по психодиагностике, 680.47kb.
- Непал или Заметки девушки в одиночном плавании, 4520.79kb.
Прямолинейное движение судна во льдах. Общий вид уравнения, описывающего неустановившееся прямолинейное движение судна во льдах,
 , (1.7)
, (1.7)где M — масса судна вместе с присоединенными массами воды и льда, т;
RC — сопротивление воды и ветра движению судна, кН;
Rлч — чистое ледовое сопротивление движению судна, кН;
Ре — упор винта, кН;
V — скорость судна, м/с;
n — частота вращения винта, рад/с;
Нв — шаг винта, м.
При решении уравнения (1.7) принимается допущение о квазистационарности процесса движения судна. В силу того, что процесс движения судна в действительности не стационарный, величина чистого ледового сопротивления движению судна Rлч будет случайным образом колебаться относительно некоторого среднего значения вследствие неоднородности льда и нестабильности силового контакта с ним. Поэтому инерционные характеристики, определяемые по формуле (1.7) с детерминированными составляющими, следует рассматривать как средние по множеству их возможных значений.
При пассивном торможении
 , (1.8)
, (1.8)Установлено, что количество ударных импульсов, возникающих при контакте корпуса судна со льдом, подчиняется закону распределения Пуассона.
Среднеквадратическую погрешность S в определении величины выбега можно определить из следующей зависимости:
 , (1.9)
, (1.9)где S — выбег судна во льдах, м;
x — средняя плотность распределения ударных импульсов о лед во времени.
Величина x для рассматриваемых стационарных и близких к ним режимов постоянна. Ее можно выразить как
 , (1.10)
, (1.10)где
 — средняя скорость судна, м/с;
— средняя скорость судна, м/с;x — длина ледяных сегментов, образующихся при ломке сплошного ледяного покрова бортами судна, м.
Эмпирически показано, что x связана с толщиной льда h линейной зависимостью x = ah.
Тогда
 , (1.11)
, (1.11)где а — эмпирический коэффициент (а = 2030).
Величина x в сплошных льдах зависит от толщины льда, формы носовой оконечности судна и обычно составляет 3–5 м.
Отсюда x 0,2–0,3 с–1. В битых льдах x обратно пропорциональна среднему размеру льдины r. В мелкобитых льдах r 10 м, так что x 0,1 с–1. Таким образом, разброс значений длины выбегов в битых льдах больше, чем в сплошных.
Вероятность превышения уровня S = 3S составляет 0,28 %, а 2S — 4,56 %.
При активном торможении длина среднего значения тормозного пути
 , (1.12)
, (1.12)а среднеквадратическое отклонение от среднего значения Sт
 , (1.13)
, (1.13)т.е. при активном торможении существенно уменьшается тормозной путь и значение разброса.
Решение дифференциальных уравнений (1.7) и (1.8) требует накопления статистических натурных данных для различных типов судов при движении их во льдах.
Определение чистого ледового сопротивления движению судна в битых льдах. Полное сопротивление Rл при плавании судна во льдах принято делить на сопротивление воды движению судна (на чистой воде) RС и чистое ледовое сопротивление Rлч:
 , (1.14)
, (1.14)Процесс движения судна в битых льдах очень сложен, составить его аналитическое описание не представляется возможным. Поэтому расчетные зависимости, связывающие сопротивление судна в битых льдах со скоростью движения, размерениями и параметрами льда, создавались на основании эмпирических данных, полученных в ходе натурных экспериментов. Основываясь на исследованиях, чистое сопротивление движению судна в битых льдах представим в следующем виде:
 (1.15)
(1.15)где r — протяженность битого льда, м;
h — толщина битого льда, м;
— плотность льда, т/м3;
fт — коэффициент трения борта о лед (fт = 0,08÷0,15);
— коэффициент полноты действующей ватерлинии;
н — коэффициент полноты носовой части действующей ватерлинии;
0 — угол входа носовой ветви действующей ватерлинии, град;
 — безразмерные коэффициенты (табл. 1.5);
— безразмерные коэффициенты (табл. 1.5);Sсж — сила сжатия, баллы;
g — ускорение свободного падения, м/с2.
Таблица 1.5
Значения коэффициентов
| Коэффициенты | Сплоченность льда, баллы | |||
| 4 | 6 | 8 | 10 | |
 (при Пk 10) (при Пk 10) | 0 | 0 | 7 10–2 | 7,4 10–2 |
 | 0,93 | 2,54 | 5,70 | 8,2 |
 | 4,3 | 4,3 | 4,3 | 4,3 |
 | – | – | – | 30 10–2 |
Здесь Пk — относительная ширина поля битого льда, т. е. отношение ширины канала к ширине судна.
Чистое ледовое сопротивление Rлч при движении судна в битых льдах слагается из составляющих:
 , (1.10)
, (1.10)где R1 — статическая составляющая сил сопротивления, не зависящая от скорости судна во льду;
R2 — диссипативные силы сопротивления, возникающие вследствие сопротивления воды раздвиганию льдин и трения льдин друг о друга;
R3 — импульсивное сопротивление, обусловленное потерей кинетической энергии судна при ударах его о льдины;
R4 — сила сопротивления, обусловленная работой, затрачиваемой на притапливание, поворачивание льдин, возникающее при этом волнообразование и изменение посадки судна.
Транспортное судно будет испытывать большее сопротивление, чем ледокол из-за наличия цилиндрической вставки.
Поэтому ледовое сопротивление судна можно выразить:
 , (1.17)
, (1.17)где Rлч — ледовое сопротивление, рассчитанное без учета влияния цилиндрической вставки, т;
lцв — длина цилиндрической вставки, м;
L — длина судна, м;
Kцв — коэффициент, равный 0,4.
1.5. Расчет технической скорости движения судна
в природных льдах и прокладка каналов
на криволинейных участках
Для определения технической скорости построим алгоритм движения судна в различных ледовых условиях. Основными параметрами, определяющими возможность движения судна в природных льдах будет льдопроходимость и скорость.
Как описано выше, значение льдопроходимости определяется решением квадратного уравнения, связывающего ледовое сопротивление и тягу гребных винтов вблизи швартовного режима.
Для определения упора гребных винтов можно использовать формулу:
 , (1.18)
, (1.18)где D — диаметр винта, м;
Vс — скорость судна, уз;
Np — мощность на валу, л.с.;
п — количество винтов;
m1, m2 — коэффициенты, значения которых определяются по прототипу, в первом приближении могут быть использованы их статистические значения m1 = 71,4; т2 = 15,3.
Расчет скорости движения судна в канале за ледоколом в ровных сплошных льдах:
 , (1.19)
, (1.19)где Vл — скорость движения судна в канале, уз;
h — толщина преодолеваемого льда, м;
Vчв — скорость хода на чистой воде, уз;
h0 — льдопроходимость судна в ровных сплошных льдах
(в рассматриваемом выше материале обозначали как hnp).
где
 — относительная ширина судна, вычисляемая по формуле:
— относительная ширина судна, вычисляемая по формуле: (1.20)
(1.20)где Вс — ширина судна, Вл — ширина ледокола.
Льдопроходимость судна при его движении в канале за ледоколом (hk) определяется через льдопроходимость судна при плавании в сплошном льду и соотношения размеров ледокола и судна по формуле:
hk = h0 / Kс.
Воспользумся этой формулой для определения фактической льдопроходимости судна, как показателя его технического состояния и способности плавания во льдах на примере работы одного из судов проекта СА-15 с атомным ледоколом в арктическую навигацию 2003 года.
Допустим, что судно может идти по каналу за ледоколом во льду толщиной 180 см с минимальной устойчивой скоростью 2 узла.
h0 = hkKc = 180 0,29 = 52 см. (1.21)
Практически при плавании по каналу во льдах 180 см судно требовало постоянных околок, значит можно сделать предположение, что фактическая льдопроходимость судна была менее 50 см, т. е. более чем в 2 раза отличалась от льдопроходимости, заявленной в паспорте судна.
Действительно, суммируя факторы — судно в балласте, мятый шероховатый корпус от остатков краски «Инерта», отсутствие ПОУ, разрегулированные, в плохом техническом состоянии главные двигатели и ограничение судовладельцем их мощности на 20 % оказали существенное влияние на ухудшение ледовой ходкости и снизили льдопроходимость судна, более чем в 2 раза.
Предположим, что судно вышло в рейс с построечной льдопроходимостью — 100 см тогда, воспользовавшись формулой (1.19) мы получим Vл = 9,7 узла.
Пересчитаем эту формулу для льда 2,2 метра, т. е. на пределе льдопроходимости ледокола. Получим: Vл = 7,8 узла, но скорость ледокола (в этом случае) не будет превышать 2 узлов. Действительно, когда эти суда были молодые, в канале за ледоколом в сплошных льдах шли «ходом» с запасом мощности. Остановки могли быть только в ледовых пробках после работы ледокола «набегами», т. е. во льдах за пределами льдопроходимости ледокола.
Анализируя научные работы о ледовой ходкости, основным и практически единственным путем оценки скоростей движения судов и ледоколов в природных льдах, с учетом многообразия их характеристик является использование данных натурных наблюдений.
Следует заметить, что определенное количество и объем натурных наблюдений для ограниченного сочетания характеристик ледяного покрова уже собран и может быть использован на практике.
Принято, что натурные наблюдения за движением ледокола в сплошных льдах используются в качестве реперных, а влияние характеристик природного льда представляется в виде эмпирических поправок к ним.
Уравнение ледовой ходкости судна и ледокола в ровных сплошных льдах записывается в виде:
 , (1.22)
, (1.22)где Vл — скорость хода во льдах, уз;
Vчв — скорость хода на чистой воде, уз;
h — толщина льда, м;
 ; (1.23)
; (1.23)h0 — льдопроходимость судна, или ледокола.
При толщинах льда, больших расчетной льдопроходимости, движение осуществляется набегами. Зависимость движения от толщины льда при этом описывается уравнением:
 . (1.24)
. (1.24)Поправочных коэффициенты, позволяющие учесть характеристики льда.
Влияние разрушенности льда учитывается путем введения поправочного коэффициента к льдопроходимости в сплошных льдах Kн. Его численное значение определяется по формуле:
Kн = 0,75/(0,75 – 0,065 R KP), (1.25)
где R — разрушенность льда, баллы;
KP — коэффициент, учитывающий отличие в разрушенности льда разного возраста:
| KР | Многолетние льды | Двухлетние льды | Однолетние льды |
| 0,6 | 1,0 | 1,33 |
Льдопроходимость при этом рассчитывается по формуле:
Движение в сплоченных льдах условно рассматривается как движение, происходящее на чистой воде и во льдах, приведенных к сплоченности 10 баллов. При этом сплоченность интегрируется как соотношение расстояния, пройденного в десяти-бальных льдах к общему пути.
Скорость движения во льдах сплоченностью i определяется по формуле:
 , (1.26)
, (1.26)где S10, S0 — относительная протяженность пути во льдах, сплоченностью десять баллов и по чистой воде соответственно;
V10, V0 — скорости движения в десяти-бальных льдах и по чистой воде соответственно.
Значения S10 зависят от сплоченности льда и его относительной толщины.
Скорость движения в смешанных льдах различного возрастного состава определяется аналогично:
 (1.27)
(1.27)где Sлi, Vлi — относительная протяженность пути и скорость во льдах i-й возрастной градации, соответственно;
п — число возрастных градаций льда на участке пути.
Влияние торосистости ледового покрова на скорость движения учитывается путем увеличения фактической толщины льда. Значение этого коэффициента рассчитывается с помощью зависимости:
где Т — торосистость ледяного покрова, баллы;
Влияние заснеженности льда на скорость движения учитывается введением дополнительного слоя льда определенной толщины.
Значение поправки к толщине ледового покрова определяется по формуле:
где Нс — толщина снежного покрова, см.
Таким образом, толщина льда на отрезке пути с учетом торосистости и заснеженности корректируется по формуле:
h = hKT + h; (1.28)
Приведенный выше алгоритм позволяет рассчитать технические скорости автономного движения судна, или ледокола, либо тандема в природных льдах.
Из опыта известно, что часть времени суда и ледоколы плавают по чистой воде, используя при этом мощность ЭУ частично. Для отражения этого явления производится расчет экономической скорости хода и в соответствии с ее величиной определяется снижение уровня используемой мощности.
В наших расчетах под экономической скоростью хода понимается скорость, соответствующая минимуму эксплуатационных затрат на милю пути. В первом приближении можно принять, что мощность, необходимая для движения пропорциональна скорости в третьей степени.
В этом случае экономическая скорость хода может быть определена:
 , (1.29)
, (1.29)где а — суточные эксплуатационные затраты без стоимости топлива, руб / сут;
b — суточные затраты на топливо, отнесенные к значению куба скорости полного хода, руб / сут уз3.
Прокладка ледовых каналов на криволинейных участках. Чтобы выполнить основную задачу — обеспечить проводку судов во льдах в кратчайшие сроки, необходимо особое внимание уделять прокладке канала определенной ширины и радиуса кривизны в местах изменения курсов, так как именно на криволинейных участках наиболее часто происходят повреждения и остановка проводимых судов. Они не вписываются в канал, «зарезаются» в его кромки и останавливают весь караван. В некоторых случаях предпочтительнее преодолеть участок более труднопроходимого льда, чем делать крутые повороты, а затем производить околку застрявших судов.
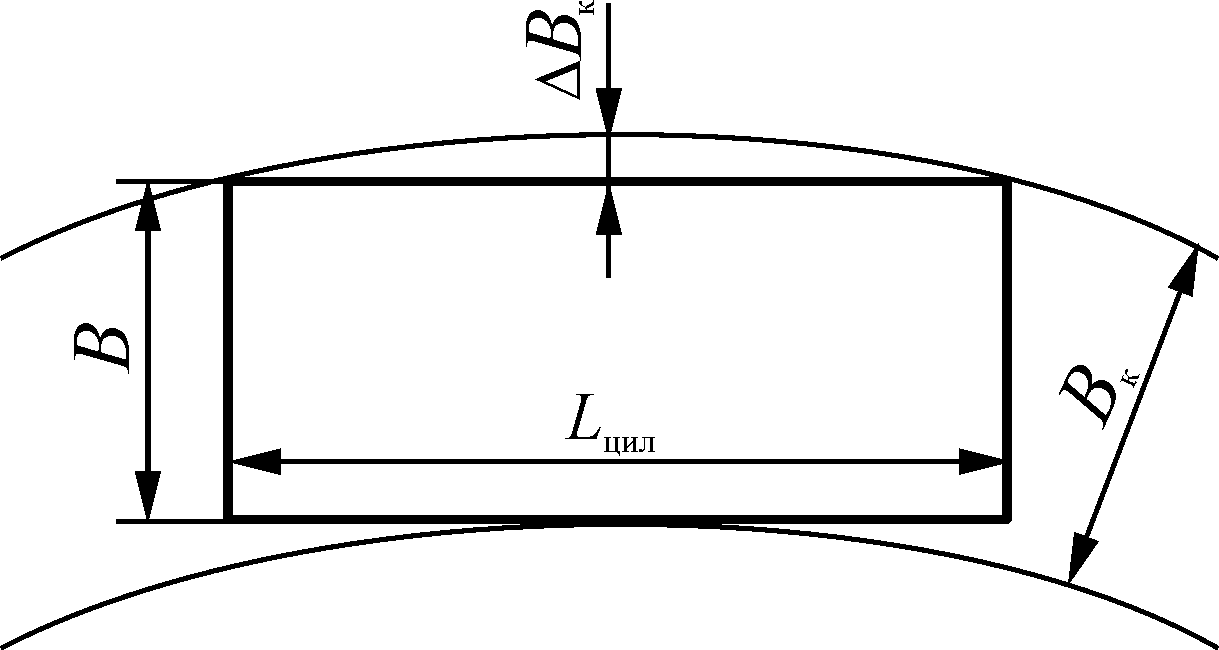
Рис. 6.13. Схематизированная модель движения судна на криволинейной
траектории в ледовом канале
В основу схематизированной модели (рис. 6.13) движения проводимого судна можно принять условие прохождения цилиндрической вставки корпуса в ледовом канале минимального радиуса кривизны при определенных разностях в ширине канала, проложенного ледоколом и корпусом проводимого судна.
Радиус кривизны канала, в который впишется цилиндрическая часть корпуса, лимитирующего проводимого в караване судна, может быть определен из выражения
 , (1.30)
, (1.30)где Lцил — длина цилиндрической вставки судна, м;
Вк — разность между шириной канала и шириной проводимого судна, м.
Задаваясь различными значениями Lцил и Вк, по формуле (6.30) составлена таблица (табл. 1.6) минимальных значений необходимого радиуса кривизны ледового канала, которая охватывает размерения судов дедвейтом от 3 до 100 тыс. тонн.
Таблица 1.6
Значения минимальных радиусов R кривизны ледовых каналов
| Lцил | Вк, м | |||||
| 1 | 2 | 3 | 4 | 5 | 6 | |
| 80 | 800 | 401 | 268 | 202 | 162 | 136 |
| 100 | 1250 | 626 | 418 | 314 | 252 | 211 |
| 120 | 1800 | 901 | 602 | 452 | 363 | 303 |
| 140* | 2450 | 1226 | 818 | 615 | 493 | 411 |
* Ширина судна значительно превышает ширину ледокола.
При проводке каравана судов капитан ледокола должен иметь информацию о циркуляции проводимых судов с тем, чтобы ориентироваться на судно с наибольшими параметрами циркуляции.
При проводке на мелководье необходимо учитывать и увеличение радиуса циркуляции из-за соотношения осадки и глубины проводимых судов. Должно также приниматься в расчет и влияние ветра и течения.