
Программно-вычислительный комплекс дина в системе matlab для решения задач управления плазмой токамака в. Э. Лукаш
| Вид материала | Документы |
СодержаниеСтруктурная схема расчета эволюции плазмы в коде дина Simulink-версия кода дина Список литературы |
- Обзор средств matlab и ToolBox'ов для приближения данных, 622.57kb.
- Многофункциональный вычислительный комплекс для обработки радиолокационных сигналов, 99.08kb.
- Решение инженерных задач в системе matlab практическое пособие по курсу "Информатика", 407.62kb.
- Т. Н. Зайченко Россия, Томск, Томский государственный университет систем управления, 85.43kb.
- «использование системы компьютерной математики matlab для решения задач лазерной физики», 383.81kb.
- Учебно-методический комплекс для студентов заочного обучения специальности Прикладная, 63.23kb.
- Программа Вычислительный, 23.44kb.
- Тема: «Автоматизированная система управления предприятием (асуп), интегрированная, 43.36kb.
- В. М. Трембач московский авиационный институт (государственный технический университет), 33.33kb.
- Утверждаю, 103.77kb.
УДК 533.951
ПРОГРАММНО-ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС ДИНА
В СИСТЕМЕ MATLAB ДЛЯ РЕШЕНИЯ ЗАДАЧ УПРАВЛЕНИЯ ПЛАЗМОЙ ТОКАМАКА
В.Э. Лукаш (ИЯС РНЦ «Курчатовский институт»), В.Н. Докука,
Р.Р. Хайрутдинов (ГНЦ РФ ТРИНИТИ)
Рассматриваются принципы построения программно-вычислительного комплекса в рамках системы инженерных и научных расчетов MATLAB на основе Simulink-версии плазмофизического кода ДИНА, используемого для проведения численного анализа работы регуляторов положения, формы и величины тока плазмы как на действующих токамаках, так и в проектах будущих токамаков-реакторов. Приведен пример применения созданного программного комплекса для моделирования процесса управления плазмой с помощью системы обратных связей в проекте реактора КТМ.
SIMULATION CODE DINA INTO MATLAB ENVIRONMENT FOR DEVELOPMENT OF TOKAMAK PLASMA CONTROL DESIGN. V.E. LUKASH, V.N. DOKUKA, R.R. KHAYRUTDINOV. Construction of Simulink-version of plasma-physic DINA simulation code in the MATLAB environment is considered. Such version of thecode is used for the numerical analysis of plasma position, shape and current controllers in the both existing tokamaks and projects of future tokamak-reactors. Application of such version of the code for the modeling of plasma control system in the project of tokamak-reactor KTM is presented.
ВВЕДЕНИЕ
В связи с активной деятельностью по созданию международного термоядерного реактора ИТЭР в настоящее время значительное внимание уделяется вопросам проектирования систем управления физическими процессами в плазме токамака и самим плазменным шнуром с помощью обратных связей. Управление положением, формой и величиной тока плазмы осуществляется с помощью полоидальных магнитных полей, создаваемых обмотками управления и равновесия, а управление
профилями температуры, концентрации и плотности тока плазмы происходит с использованием источников дополнительного нагрева и токов увлечения, а также бутстреп-тока. Разработка любого алгоритма управления как для новой плазменной конфигурации, так и для совершенствования системы управления плазмой в существующей экспериментальной установке требует интенсивного предварительного численного анализа, что связано в первую очередь с высокой стоимостью эксперимента. Для проведения такого анализа необходима численная модель, правильно описывающая поведение объекта управления во всей области изменения контролируемых параметров. Приоритетной является модель, с помощью которой поведение плазменной конфигурации токамака в реальных экспериментах можно описывать с необходимой точностью самосогласованно с полоидальной магнитной системой.
Плазмофизический код ДИНА [1] в течение долгого времени систематически проходит тестирование по моделированию эволюции плазмы в реальных экспериментах на токамаках DIII-D [2] и TCV [3, 4], показывая хорошее соответствие между результатами моделирования и экспериментальными данными. Код ДИНА принят в качестве основного симулятора законов управления для проведения проектно-исследовательских работ по выбору регуляторов в системе контроля положения, формы и величины тока плазмы реактора ИТЭР. Для тестирования контроллеров, а также для моделирования разрядов в токамаках с учетом реально используемых в эксперименте систем управления была разработана Simulink-версия кода ДИНА в виде программно-вычислительного комплекса в рамках среды программирования MATLAB. Такая среда применяется для инженерных и научных расчетов, а также инструментального приложения (toolbox) Simulink [5], используемого для моделирования динамических управляемых систем. В настоящее время созданный комплекс успешно используется для моделирования процессов управления плазмой токамака TCV в экспериментах с электронно-циклотронным нагревом [6], с генерацией мод, локализованных на границе плазмы (ELM) [7], а также для выбора регуляторов в системе обратных связей для плазмы в проекте материаловедческого токамака КТМ [8].
Представленная работа включает в себя общее описание программно-вычислительного комплекса ДИНА в системе MATLAB для решения задач управления плазмой токамака, приводится структурная схема организации расчета эволюции плазмы в численном коде ДИНА, описываются принципы редукции кода ДИНА с целью включения его в виде S-функции в систему MATLAB, а также показан пример использования созданного программного комплекса для моделирования процесса управления плазмой токамака КТМ, приведены выводы.
СТРУКТУРНАЯ СХЕМА РАСЧЕТА ЭВОЛЮЦИИ ПЛАЗМЫ В КОДЕ ДИНА
Код ДИНА [1] является полуторамерным плазмофизическим кодом, моделирующим двумерное аксиально-симметричное равновесие плазмы со свободной границей во внешних магнитных полях и одномерные уравнения транспорта (усредненные по магнитным поверхностям), включающие в себя баланс энергии электронов и ионов, диффузию частиц и перенос полоидального магнитного потока . Эволюция плазмы моделируется совместно с решением электромагнитной задачи для индуктивно связанной системы окружающих плазму аксиально-симметричных проводников. К этой системе относятся короткозамкнутые витки, моделирующие окружающую плазму, пассивную электропроводящую структуру (PS) и электромагнитные катушки (PFC), создающие полоидальное магнитное поле. При этом катушки полоидального магнитного поля подключены к внешним источникам электрической мощности. Кроме того, код включает в себя полную структуру магнитной диагностики токамака, к которой относятся датчики полоидального магнитного поля (Вр) и петли для измерения полоидального магнитного потока (l).
Рис. 1. Структурная схема расчета параметров плазмы с помощью кода ДИНА в момент времени tk+1
На рис. 1 показана общая структурная схема расчета эволюции плазменной конфигурации с помощью кода ДИНА в пределах одного шага по времени между моментами tk и tk+1. Здесь использованы следующие обозначения: Ip — ток плазмы,
 — нормализованный малый радиус плазмы, где — тороидальный магнитный поток, заключенный внутри магнитной поверхности (величина max равна суммарному потоку на границе плазмы), величины j, Te, Ti и n представляют собой, соответственно, плотность тороидального электрического тока в плазме, электронную и ионную температуру, а также плотность плазмы.
— нормализованный малый радиус плазмы, где — тороидальный магнитный поток, заключенный внутри магнитной поверхности (величина max равна суммарному потоку на границе плазмы), величины j, Te, Ti и n представляют собой, соответственно, плотность тороидального электрического тока в плазме, электронную и ионную температуру, а также плотность плазмы.Система управления внешними по отношению к плазме полоидальными магнитными полями представляется рядом функционально связанных блоков, отмеченных на схеме серым цветом. Представленный пример системы управления относится к случаю, в котором по данным магнитной диагностики Вр и l (входные параметры для системы управления) в соответствии с некоторым алгоритмом рассчитывается вектор напряжений (UPFC), подаваемых на катушки полоидального магнитного поля. Коэффициент Cp представляет собой вектор контролируемых параметров, который в каждый момент времени по заданному алгоритму сравнивается с вектором предписанных параметров (Cp ref), результат сравнения посылается в контроллер К, он производит необходимые вычисления и вырабатывает вектор добавочных напряжений UPFC. Для получения напряжений на обмотках полоидального поля (UPFC) вектор добавочных напряжений UPFC складывается с вектором заданных корректирующих напряжений Uff. При этом вектор контролируемых параметров Cр связан функциональной зависимостью с данными магнитной диагностики Вр и l и, как правило, с величинами токов в катушках полоидального магнитного поля. Компонентами вектора Cр обычно являются параметры, отражающие форму плазмы (внутренняя и внешняя треугольность плазмы, ее вытянутость), ток плазмы, координаты «характерных» точек на внешней магнитной поверхности (например, координаты Х-точки, точки пересечения внешней магнитной поверхности с контуром первой стенки). Такой схематический вариант системы управления положением, формой и величиной тока плазмы используется почти на всех действующих токамаках (DIII-D, TCV, ASDEX-U, JT-60U). На этих установках в качестве функциональных связей между данными магнитной диагностики и вектором контролируемых параметров Cр используются функциональные зависимости, выведенные в результате численной обработки экспериментальной базы данных.
При отсутствии базы экспериментальных данных (случай разрабатываемых проектов токамаков-реакторов, например, ИТЭР, КТМ) для определения геометрических характеристик плазмы предполагается использовать результаты численного восстановления формы плазмы в реальном времени с использованием данных магнитной диагностики. При этом в качестве части набора контролируемых параметров могут рассматриваться, например, отклонения значений параметров внешней магнитной поверхности от предписанных величин в заранее выбранных контрольных точках. На рис. 2 представлен вариант расположения контрольных точек для плазмы реактора ИТЭР. Кроме отклонений g1—g6 в набор контролируемых параметров входят еще ток плазмы и токи в катушках полоидального магнитного поля [9].
Структурная схема расчета эволюции плазмы в коде ДИНА (рис. 3) полностью отражает систему организации управления в реальном эксперименте. При этом на каждом шаге по времени (см. рис. 1) определяется магнитная конфигурация плазмы в соответствии с решением уравнения Грэда—Шафранова, самосогласованно с решением транспортных уравнений для полоидального потока, энергии и частиц. Многочисленные тестовые расчеты процессов управления плазмы с помощью кода ДИНА в ранее проведенных разрядах на токамаке TCV [3] дали хорошее совпадение экспериментальных и численных результатов и доказывают надежность модели плазмы в коде ДИНА.
Рис. 2. Контрольные точки (g1—g6), в которых рассматриваются отклонения внешней магнитной поверхности плазмы ИТЭР от первой стенки
g1
g2
g3
g4
g5
g6
б
Рис. 3. Вариант а — общая схема системы управления в эксперименте, б — численная реализация системы управления с помощью кода ДИНА
 П
П а
ри стандартном процессе моделирования новой установки и/или нового контроллера необходимо выполнить достаточно большой объем работ по созданию программного интерфейса между кодом и уникальным для каждой установки оборудованием и элементами системы управления. Этот процесс является достаточно длительным и требует тщательной проверки, при этом не всегда удается создать адекватную «математическую модель» реальной системы управления, в частности, в силу ее высокой сложности и закрытости для общего доступа. Кроме того, созданный код оказывается очень сложным и неудобным для использования «обычным» потребителем, и в случае возникновения какой-либо модернизации, например, контроллера или появления нового элемента диагностики требуется непосредственное вмешательство разработчиков кода. При этом иногда процесс такой модернизации может приводить к переделке кода. Естественно возникает идея о разделении процесса моделирования установки на две части: на моделирование собственно плазменных процессов и «всего остального», а именно контроллера, т.е. системы управления со связанным с ней оборудованием, при этом необходимо использовать специальное обеспечение для обмена информационными потоками между обеими частями (см. рис. 3, б). Реализованный таким образом в коде ДИНА подход позволяет достаточно быстро настроить код на любую моделируемую установку и создает возможность проведения расчетов эволюции плазмы для реально используемой в эксперименте системы управления. Причем изменения как в систему управления, так и в контроллер могут вноситься независимо от кода ДИНА, который можно рассматривать в качестве модели реального токамака как объекта управления.
На установках DIII-D и TCV существуют модели системы управления, реализованные с использованием различных сред и инструментов программирования, например, на DIII-D используются MATLAB, IDL и С, на TCV — MATLAB. Пакет MATLAB традиционно использовался при разработке и тестировании систем управления плазмой в токамаках. Возможность реализации принципа разделения программного обеспечения плазма—система управления возникает с появлением в рамках пакета MATLAB системы визуального моделирования Simulink и обеспечением процедур интерфейса с написанными на разных языках программирования кодами, что позволяет использовать в системе MATLAB уже имеющиеся коды для моделирования процессов в объектах управления. Сложный объект управления, реализованный на языках Fortran или С, включается в Simulink в виде блока S-функции. Применительно к моделированию системы управления положением, формой и величиной тока плазмы модель плазмы в токамаке была реализована на основе новой версии кода ДИНА, которая организована как S-функция системы Simulink.
SIMULINK-ВЕРСИЯ КОДА ДИНА
Принципиальной основой построения модели физического объекта в рамках программного комплекса Simulink является упорядоченный в соответствии с логикой функционирования объекта обмен входными и выходными потоками данных между составляющими модель блоками. Одним из таких блоков в задаче управления является модифицированная версия кода ДИНА, в которой в отличие от прежних версий не предполагается обращения к внешним файлам, содержащим необходимые для работы кода данные, связанные как с собственно компонентами установки, так и с используемым контроллером. В соответствии с архитектурой комплекса Simulink в системе MATLAB интерфейс между кодами, написанными на алгоритмических языках Fortran, C, С++, ADA, и данными из рабочей области выполняется специально разрабатываемой для каждого кода S-функцией. При этом обращение из S-функции к основной подпрограмме кода происходит через формальные параметры. При обмене данными из рабочей области MATLAB сама S-функция допускает использование как статических, так и динамических типов переменных. Статический обмен данными происходит через формальные параметры S-функции, загрузка которых происходит на стадии процедуры инициализации. Возможно построение S-функции, учитывающей изменение значений статических формальных параметров (если таковое необходимо) в процессе моделирования, что иногда требуется. Динамический обмен данными в процессе моделирования происходит через специальные входы и выходы, которые на схеме блока S-функции изображены, соответственно, как входящие и выходящие стрелки. На схеме, приведенной на рис. 4, в качестве примера использования описываемого программного комплекса для моделирования процесса управления плазмой токамака КТМ блок S-функции изображен прямоугольником с надписью «DINA» (код ДИНА).
Рис. 4. Пример программного комплекса ДИНА в системе MATLAB для моделирования процесса управления плазмой материаловедческого токамака КТМ
В процессе инициализации, которая выполняется при запуске модели средствами S-функции, производится проверка формальных статических параметров и последующая их загрузка из рабочей области MATLAB в соответствующие массивы кода, которые в течение процесса моделирования не меняются. Используемые формальные статические параметры условно можно разделить на две группы. К первой группе отнесены параметры, касающиеся конфигурации изучаемой установки: например, параметры полоидальной магнитной системы, координаты контура первой стенки и лимитера установки и т.д. В созданной версии кода эти параметры сгруппированы в виде массивов переменных рабочего пространства MATLAB.
Во вторую группу включены формальные статические параметры, которые можно изменять в зависимости от характера поставленной задачи. Они представлены как векторы переменных рабочего пространства MATLAB и включают в себя, например, такие начальные плазмофизические параметры, как коэффициенты для задания профилей плотности тока, температуры и плотности плазмы, координаты магнитной оси плазмы, величину тока плазмы, температуру и среднюю плотность плазмы на ее оси и т.д.
Блок S-функции ДИНА, представленный на рис. 4, имеет три динамических группы входов и восемь выходов. Первая группа входных параметров (Parameters) передает из рабочего пространства MATLAB в код ДИНА величины зависящих от времени переменных. Основными динамическими переменными этой группы являются:
— усредненная электронная плотность плазмы;
— фактор аномального сопротивления плазмы;
— отношение величин плотностей плазмы на ее границе и в центре;
— относительный радиус зоны поглощения мощности дополнительного нагрева;
— аномальный фактор для электронной теплопроводности;
— критическое значение запаса устойчивости на магнитной оси по отношению к возбуждению внутренних срывов.
Вторая группа входов обеспечивает передачу динамических переменных (Additional heating) о внешних источниках нагрева плазмы и генерации токов увлечения. Плотности распределения для соответствующих параметров могут быть получены с помощью других численных кодов и использованы здесь как входные параметры задачи.
Третий динамический вход (PF Voltage) представляет собой вектор напряжений от источников питания, подаваемых на обмотки, создающие полоидальные магнитные поля для равновесия и управления плазменным шнуром в установке.
Функциональное назначение выходов из блока S-функции ДИНА состоит в передаче необходимой текущей информации в рабочую область системы MATLAB для выполнения вычислений в системе управления положением и формой плазмы, а также получения диагностической информации о состоянии основных параметров установки. Вся поступающая через выходы информация сохраняется на время моделирования в соответствующих массивах, названия которых указаны в рамках, и доступна пользователю в процессе моделирования, что позволяет вести постоянный визуальный контроль состояния любого параметра, включенного в список вывода. Этот список текущей информации для рассматриваемой S-функции включает в себя:
— значения величин токов в полоидальных обмотках;
— значения величин токов в элементах вакуумной камеры;
— значения полоидальных потоков магнитного поля в магнитных петлях установки;
— значения магнитной индукции в магнитных зондах;
— величины напряжений в магнитных петлях, индуцированных плазменным шнуром;
— радиальные профили ряда физических параметров;
— значения некоторых параметров плазмы;
— координаты границы плазмы.
Схема управления положением плазмы токамака-реактора КТМ, представленная на рис. 4, реализована следующим образом. Поступающие с выхода сигналы Rmag и Zmag, характеризующие текущее положение плазменного шнура, сравниваются с заранее предписанными значениями Rref и Zref, после чего их разности поступают на соответствующие ПД-регуляторы R- и Z-State Space. В регуляторах вырабатываются сигналы, управляющие работой исполнительных устройств R или Z-control. Исполнительные устройства формируют необходимые добавки к напряжениям V_contr, которые, суммируясь с вектором предписанных напряжений U0, дают в результате вектор напряжений V_tot для обмоток полоидального магнитного поля.
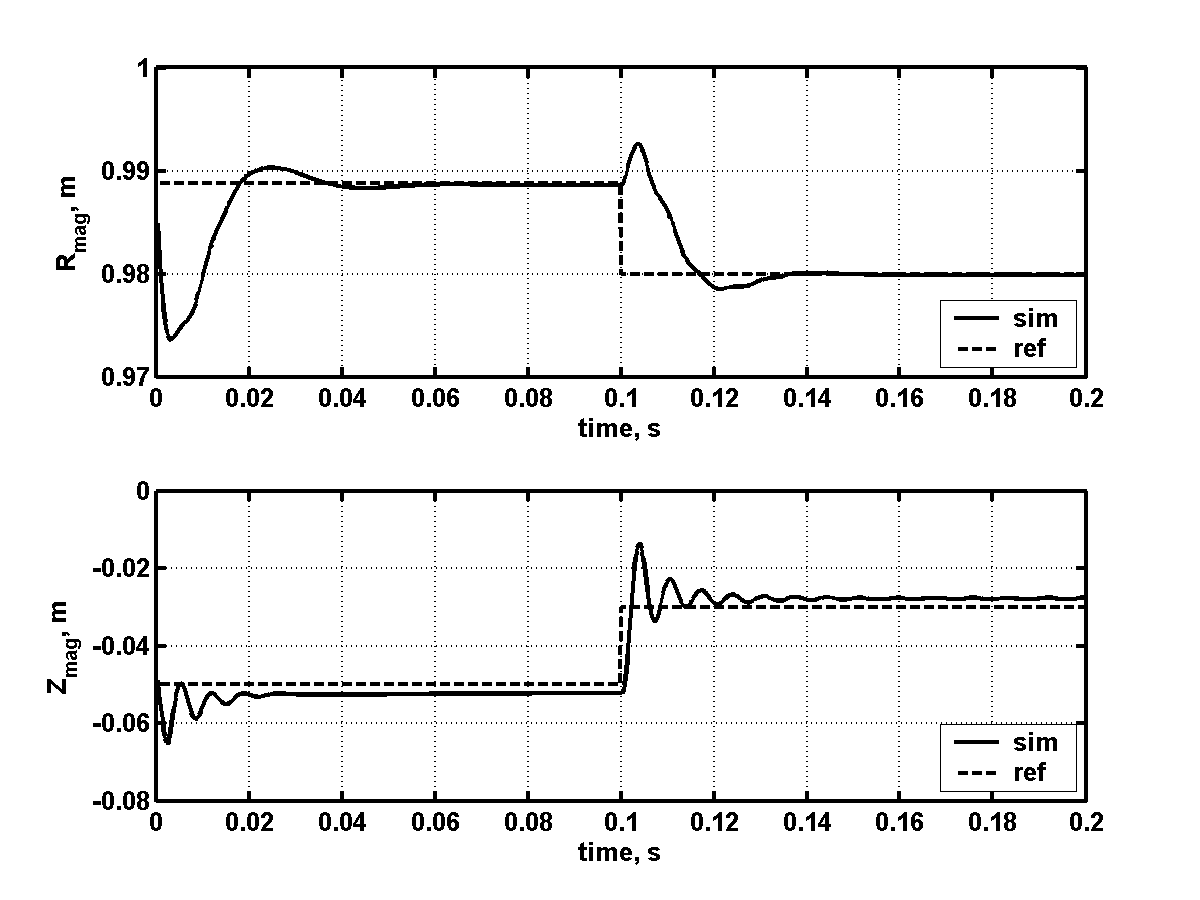
Рис. 5. Эволюция координат магнитной оси Rmag и Zmag плазмы токамака КТМ в процессе скачкообразного изменения возмущающего воздействия от функций Rref и Zref
На рис. 5 в качестве примера показана эволюция координат магнитной оси Rmag и Zmag плазмы токамака КТМ в процессе скачкообразного изменения функций Rref и Zref, полученная моделированием с помощью рассматриваемого программно-вычислительного комплекса.
ЗАКЛЮЧЕНИЕ
Первый опыт эксплуатации плазмофизического кода ДИНА в рамках системы MATLAB—Simulink при решении задач численного анализа работы регуляторов положения, формы и величины тока плазмы как действующего токамака TCV, так и разрабатываемого проекта КТМ показал высокую эффективность комплекса при использовании его различными пользователями (не только разработчиками кода ДИНА). Очевидным преимуществом представленного вычислительного комплекса является очень простой доступ средствами MATLAB к блокам системы управления физическим процессом. Разработанный комплекс допускает дальнейшее развитие за счет возможности вынесения за пределы блока S-функции кода ДИНА по желанию пользователя произвольных блоков, в которых сам пользователь может расположить написанную на языке MATLAB собственную программу расчета интересующего его физического явления в плазме. Такими параметрами могут быть, например, коэффициенты теплопроводности плазмы, бутстреп-ток, радиус перемешивания плазмы при пилообразных колебаниях и т.д.
СПИСОК ЛИТЕРАТУРЫ
- Khayrutdinov R.R., Lukash V.E. — J. Comp. Phys., 1993, vol. 109, p. 193.
- Humphreys D.A., Kellman A.G., Khayrutdinov R.R., Lukash V.E. Time-dependent simulation of DIII-D plasma evolution and control scenarios. — APS, 1995, vol. 40, p. 1191.
- Khayrutdinov R.R., Lister J.B., Lukash V.E., Wainwright J.P. — Plasma Phys. Control. Fusion, 2001, vol. 43, p. 321.
- Favez J.-Y., Khayrutdinov R.R., Lister J.B., Lukash V.E. — Ibid., 2002, vol. 44, p. 171.
- Simulink Dynamic System Simulation for MATLAB. The Mathworks Inc., 2000.
- Lukash V.E., Raju D., Dokouka V.N. et al. — Fusion Eng. and Design, 2003, vol. 66—68, p. 767.
- Degeling A.V., Martin Y.R., Lister J.B. et al. — Plasma Phys. Control. Fusion, 2003, vol. 45, p. 1637.
- Dokuka V.N., Khayrutdinov R.R. The use of DINA code for controllers testing at KTM device in the frame of MATLAB-Simulink environment. — In: 30th EPS Conf. on Controlled Fusion and Plasma Physics. Sankt-Petersburg, Russia, July, 2003, P-4.168.
- Mondino P.-L., Gribov Yu.V., Lukash V.E. et al. Plasma Current and Shape Control for ITER. — In: 20th SOFT, Marseilles, France, September, 1998, vol. 1, p. 595—598.
Статья поступила в редакцию 17 марта 2004 г.
Вопросы атомной науки и техники.
Сер. Термоядерный синтез, 2004, вып. 1, с. 40—49.