
В. И. Сысун К. В. Гостев 2009 г. 2009 г. Ооо «Плазмалаб» удк регистрационный № Инв. № Отчет
| Вид материала | Отчет |
- Отчет кб «природа» (ооо) о финансовом положении за 31 декабря 2009 года, 3568.88kb.
- Моу сош №45 с углубленным изучением иностранного языка, 86.88kb.
- Рассмотрено Согласовано Утверждаю на заседании мо заместитель директор учителей музыки, 221.3kb.
- Годовой отчет ОАО «туймазинский завод автобетоновозов» за 2009 год, 1313.01kb.
- Правила, 1751.07kb.
- Годовой отчет ОАО «Мосметрострой» за 2009 год, 823.26kb.
- Отчет председателя вро ООО «Ассоциация юристов России» о деятельности отделения, 332.79kb.
- Отчёт о работе мк им. К. Цеткин за 2010-2011 учебный год, 1968.71kb.
- Всоставе краткосрочных финансовых вложений на 31. 12. 2009 отражены депозиты в ОАО, 1336.83kb.
- Отчет о финансовом положении по состоянию на 31 декабря 2009 года 4 Отчет о прибылях, 1168.36kb.
УТВЕРЖДАЮ УТВЕРЖДАЮ
Декан _________ факультета Директор ООО «Плазмалаб»
М.П М.П.
_______________ В.И.Сысун _______________ К.В. Гостев
«____» _____________ 2009 г. «____» _____________ 2009 г.
ООО «Плазмалаб»
УДК
Регистрационный №
Инв. №
ОТЧЕТ
о выполнении НИОКР по теме:
«Разработка лабораторного образца беспроводной системы автоматизации научных исследований в области низкотемпературной плазмы»
(государственный контракт № ______________________ )
Этап № 4. «Исследование характеристик лабораторного образца. Отладка схемотехнических решений. Отладка ПО. Опытная эксплуатация. Изучение допусков и условий функционирования. Подготовка документации.»
(Заключительный)
Руководитель работ А.Д.Хахаев
ПЕТРОЗАВОДСК 2009
СПИСОК ИСПОЛНИТЕЛЕЙ
Научный руководитель темы ________________ А.Д. Хахаев
________________ А.Е. Гоголев
Реферат
Отчет 23 с., 13 рис.
ХОЛОДНАЯ ПЛАЗМА, БЕСПРОВОДНЫЕ ТЕХНОЛОГИИ
В ходе второго года выполнения проекта были пройдены четыре этапа:
Первый этап включал в себя выбор среды для разработки ПО, выбор схемотехнического решения для системы в целом и для управляющего модуля в частности, разработку ПО для управляющего модуля и отладку взаимодействия ПО и управляющего модуля.
Второй этап включал в себя выбор схемотехнических решений, разработку ПО, проверку совместимости ПО для УМ и РМ и отладку работы самих модулей.
Третий этап включал в себя выбор схемотехнических решений, разработку ПО, проверку совместимости ПО для УМ и РП и отладку работы самих модулей.
Четвёртый этап включал в себя отладку ПО для всех модулей системы, проверку работы и отладку схемотехнических решений, опытную эксплуатацию, определение условий и допусков к эксплуатации системы и подготовку документации.
Содержание
1. Цели и задачи, ставившиеся при выполнении этапов НИОКР 5
2. Описание хода работ 6
3. Краткое описание работ по первому этапу 6
4. Краткое описание работ по второму этапу 10
5. Краткое описание работ по третьему этапу 13
6. Краткое описание работ по четвёртому этапу 16
7. Тестовая эксплуатация и доработки 20
8. Использованные компоненты, и анализ результатов. 21
9. Внедрение системы и дальнейшее развитие проекта 22
10. Выводы 23
1. Цели и задачи, ставившиеся при выполнении этапов НИОКР
Первый этап:
- Выбор схемотехнического решения для лабораторного образца системы беспроводной автоматизации эксперимента.
- Выбор схемотехнического решения для управляющего модуля системы.
- Выбор среды для разработки ПО.
- Начальная разработка ПО и отладка взаимодействия ПО и управляющего модуля.
Второй этап:
- Выбор схемотехнического решения радиопередающего модуля для лабораторного образца системы беспроводной автоматизации эксперимента.
- Разработка ПО для радиомодуля.
- Проверка совместимости ПО для УМ и РМ и отладка взаимодействия самих модулей.
Третий этап:
- Выбор схемотехнического решения регистрирующей подсистемы для лабораторного образца системы беспроводной автоматизации эксперимента.
- Разработка ПО для регистрирующей подсистемы.
- Проверка совместимости ПО для УМ и РП и отладка взаимодействия самих модулей.
Четвёртый этап:
- Отладка ПО для всех модулей системы.
- Проверка и отладка работы совместной работы схемотехнических решений.
- Организация опытной эксплуатации системы,
- Определение условий работы и допусков к эксплуатации системы.
- Подготовка документации на использование системы.
2. Описание хода работ
В ходе выполнения всех этапов были последовательно выполнены все необходимые, ранее запланированные работы, результатом выполнения которых стал лабораторный образец беспроводной системы автоматизации эксперимента.
3. Краткое описание работ по первому этапу
На первом этапе НИОКР на основании разработанных ранее требований было выбрано схемотехническое решение как для лабораторного образца системы беспроводной автоматизации эксперимента в целом так и в части управляющего модуля. Также в ходе этапа была выбрана среда для разработки ПО, была проведена разработка ПО и отладка взаимодействия ПО и управляющего модуля.
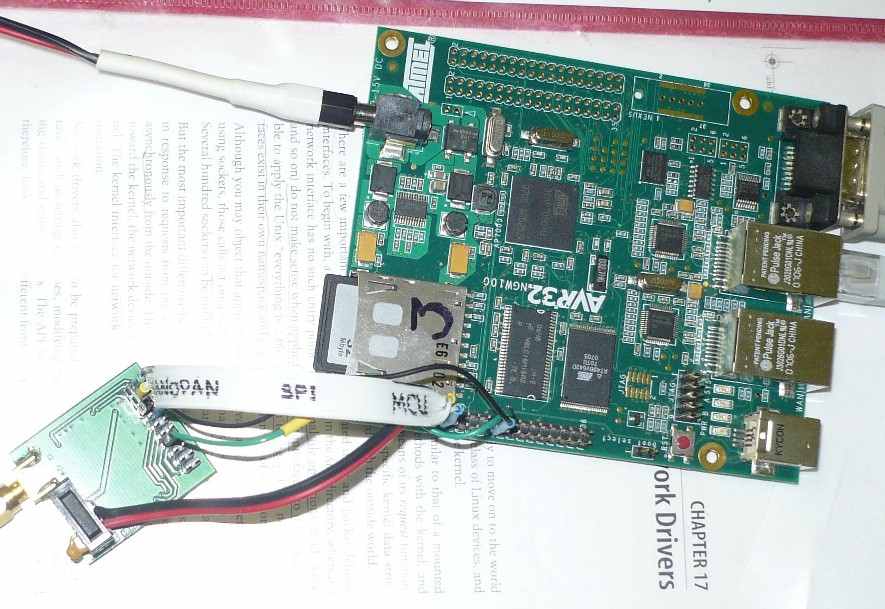
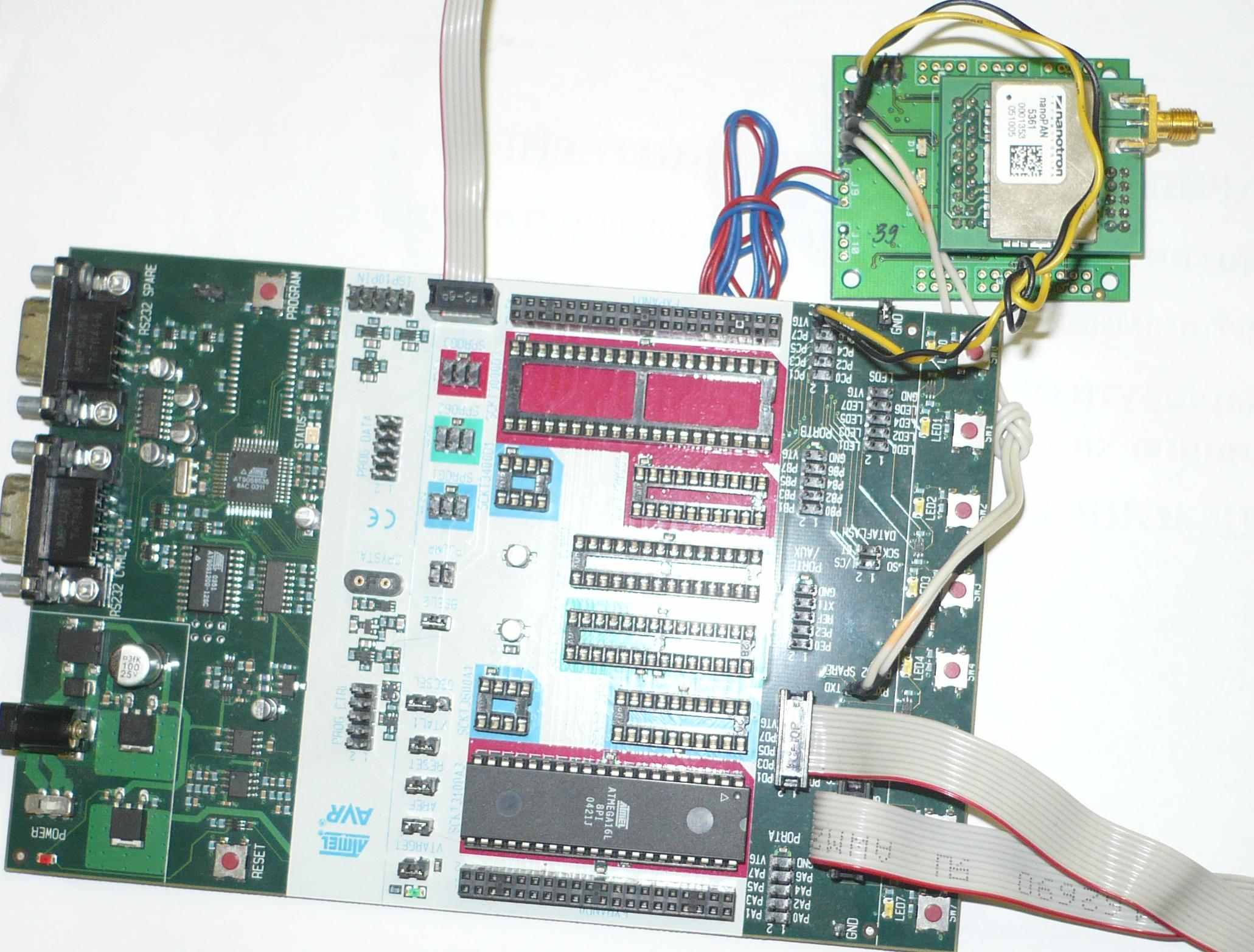
В предыдущем этапе была предложена альтернатива изначально разрабатывавшейся схеме организации модулей системы, с использованием платы разработки NGW-100 производства фирмы ATMEL вместо ранее разработанной платы с предустановленным микроконтроллером ATMega 32L (см. рис. 3.1). Плата NGW- 100 представляет собой микрокомпьютер с возможностью установки ОС Linux и подключения внешних устройств.
Функциональность NGW- 100 достаточна для проведения широкого спектра экспериментов по исследованию плазменно- пылевых образований и не требует дополнительных схемотехнических решений для агрегирования с внешним оборудованием. Однако после анализа необходимых для перехода на новое решение действий по настройке ПО, выбору, установке и компиляции ОС, с последующей разработкой специализированных под ОС Linux драйверов, было принято решение отказаться от подобного перехода. Основным критерием для подобного решения является возможность разработки готового прототипа для конкретных целей в рамках соответствующего технического задания. При использовании NGW-100, время необходимое для разработки системы вырастает в несколько раз, не позволяя уложиться в рамки календарного плана.
Выбор схемотехнического решения для управляющего модуля таким образом разрешился в пользу платы разработки ООО «Лаб127», которая обладает необходимым для организации системы функционалом и имеет низкое собственное энергопотребление.
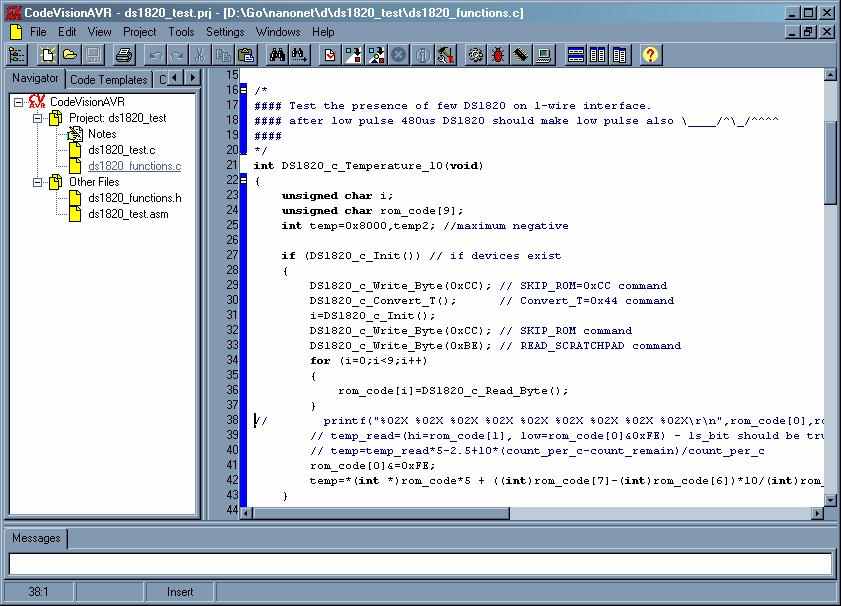
Выбор среды разработки ПО определялся интерфейсом предполагаемого радиомодуля (SPI) и интерфейсом взаимодействия с управляющим микроконтроллером (SPI), стоимостью и доступностью ПО. Исходя из вышеперечисленных параметров был произведен выбор и доступных средств разработки: CodeVision AVR (см. рис. 3.2), AVR Studio и компонента WinAVR. Первая из сред предполагает автоматический доступ к программатору и позволяет на основании заранее сконфигурированных предустановок генерировать часть исполняемого кода, существенно сокращая время разработки. Вторая среда является бесплатной для пользователя и характеризуется большей стабильностью работы, что немаловажно, учитывая работу с прошивкой кода в МК. С использованием особого драйвера, третья компонента предполагает возможность обмена данными с МК без использования программатора, через USB, которым снабжены экспериментальные управляющие модули.
Рис. 3.1. Плата NGW-100, с подключенным радиомодулем.
Благодаря встроенным функциям среды разработки, в AVR Studio также существует возможность автономного генерирования части программного кода на основе заранее выбранных предустановок, благодаря которой длительность разработки кода также может сократиться, однако в сравнении с CodeVision это свойство реализована менее эффективно.
Рис. 3.2. CodeVision AVR, среда разработки.

Рис. 3.3. Программатор (набор разработчика) AVR STK-500 Starter Kit.

Таким образом, для начальной разработки были взяты сразу несколько сред, с последующим отсевом наименее удобных и обладающих более узким функционалом для работы с периферийными устройствами управляющей платы.
Для тестирования системы к персональному компьютеру с установленной средой разработки посредством интерфейса RS-232 был подключен программатор STK- 500 (см. рис. 3.3), к которому по SPI подключалась плата управляющего модуля. На основе бесплатного демонстрационного драйвера от фирмы Nanotron были разработаны настроечные модули программы, код программы и основной цикл, имитирующий работу системы, в контрольных точках программы были вставлены метки, сигнализирующие о ходе выполнения программы кратковременным включением светодиодов на плате. Отладочное тестирование показало работоспособность системы.
4. Краткое описание работ по второму этапу
На втором этапе НИОКР на основании выбранного решения для УМ, был выбран радиомодуль, совместимый с управляющим модулем. Для выбранного РМ было разработано тестовое программное обеспечение, произведена отладка работы ПО с РМ. Также был осуществлен контроль совместимости ПО для РМ и УМ, и проведена серия экспериментов для отладки совместной работы радиомодуля и управляющего модуля.
В первом этапе было выбрано решение для УМ на основе платы разработки ООО «Лаб127», которая обладает необходимым для организации системы функционалом и имеет низкое собственное энергопотребление, при сопутствующей более низкой стоимости, чем ранее планировавшееся решение на модуле ATMEL NGW-100.
Также были выбраны среды разработки, позволяющие разработать и отладить работу ПО, ими стали: CodeVision AVR, AVR Studio и компонента WinAVR.
Кроме ранее указанных свойств, среда CodeVision AVR позволяет организовать канал связи с программируемым микроконтроллером посредством протокола RS232, для одностороннего обмена данными, для контроля работы МК (см. рис.3). Таким образом, в программное обеспечение МК были встроены средства мониторинга, позволяющие отследить все события в тестируемой системе.
Из существующих решений на основе технологии NanoNet выбирались модули, совместимые с интерфейсом SPI, и обладающие минимальной стоимостью при обеспечении необходимой функциональности.
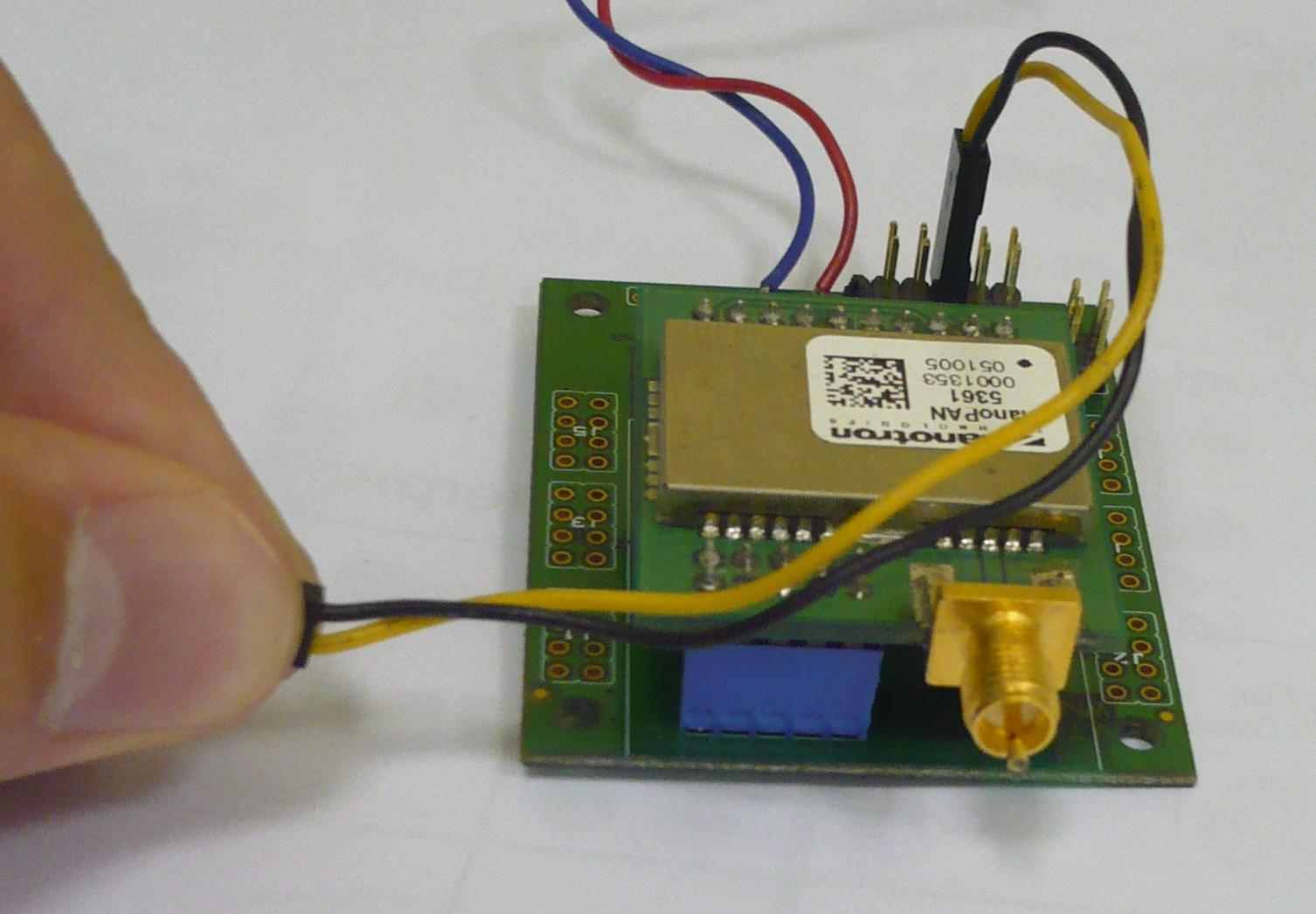
Из совместимых модулей (NanoPan 5375, NanoPan 5361, NanoPan 5361 RF TM), был выбран NanoPan 5361 RF TM (см. рис. 4.1), как снабженный платой с распаянным SPI и невысокой ценой, благодаря отсутствию функции NanoLOC.
Для выбранного модуля были разработаны библиотеки настроек, описаны типы основных процедур формирования и передачи пакета, которые далее были реализованы в виде комплексного ПО, зашиваемого в МК в виде части ПО для самого УМ.
Рис. 4.1. NanoPan 5361 RF TM.
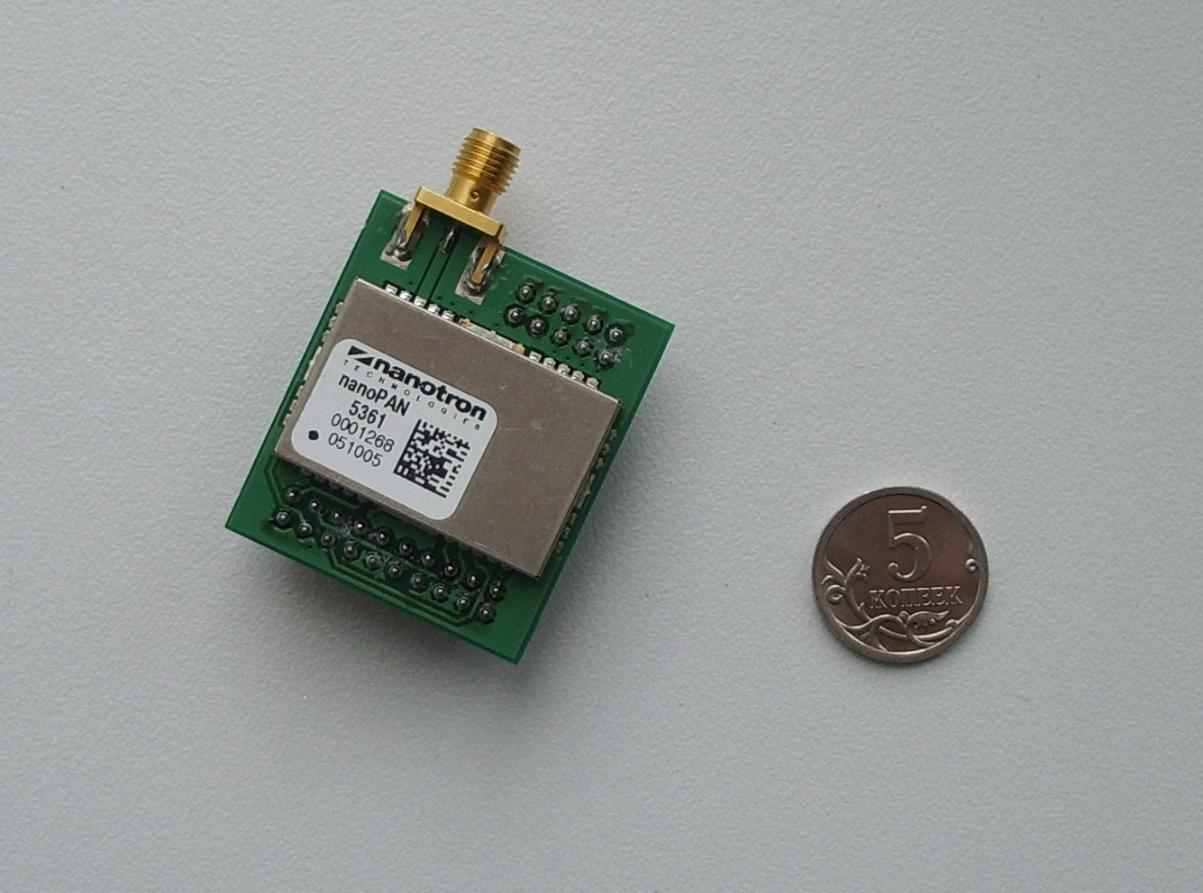
Рис.4.2. Отладочные модули, подключаемые к ПК.
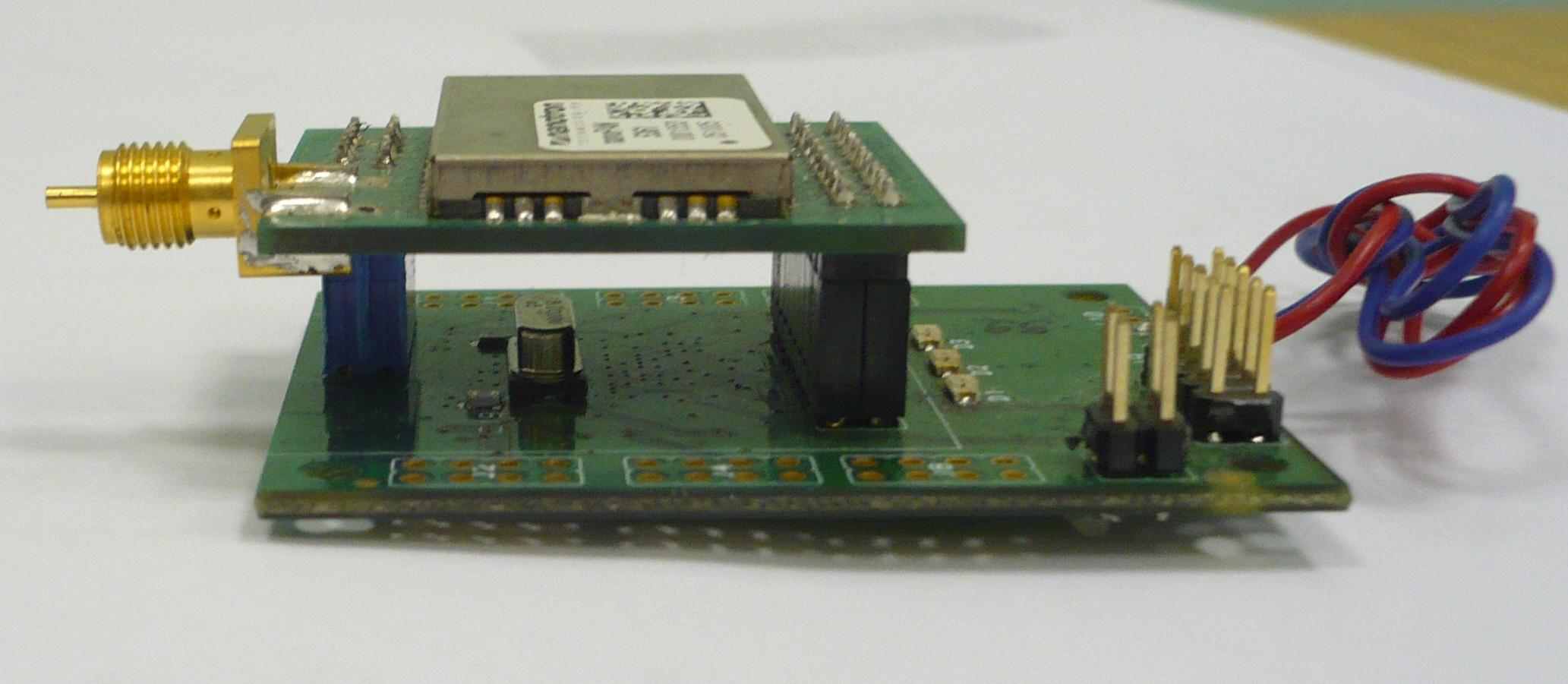
Для тестирования системы были собраны два отладочных модуля, подключаемых к ПК, между которыми организовывался обмен пакетами данных (см. рис. 4.2). Тестируемым модулям присваивались адреса фиксированной длины, с использованием которых и происходила передача данных. Таким образом, двух модулей системы достаточно для тестирования алгоритмов обмена данными для системы с любым количеством узлов, при адресной рассылке данных.
Рис.4.3. CodeVision AVR, данные с модуля системы.
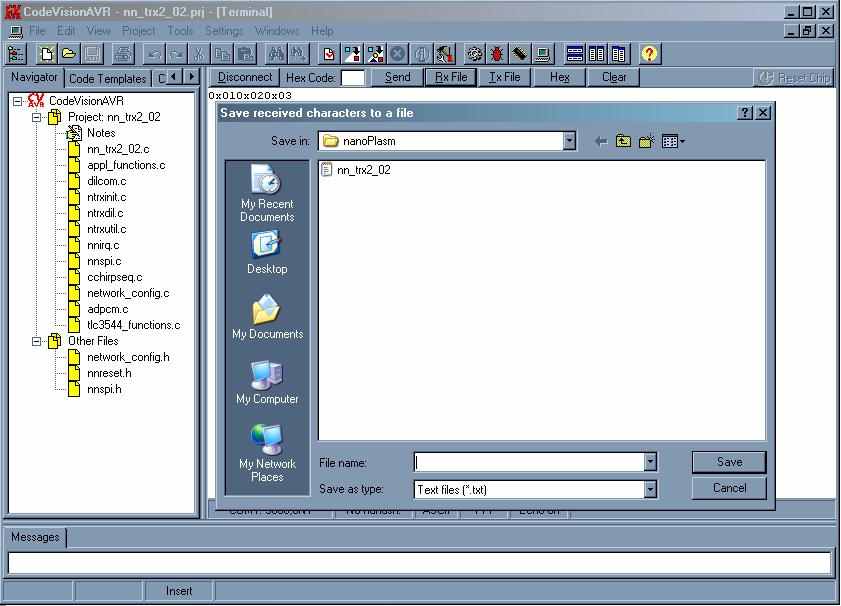
Рис.4.4. Набор разработчика AVR STK-500 Starter Kit, с подключенным УМ, агрегированным с РМ.
Для тестирования и отладки системы была проведена серия опытов в различных условиях, имитирующих работу предполагаемого образца системы автоматизации эксперимента, с отправкой, получением пакетов, передачей эмуляции полезной информации в пакетах различной длины на битовых скоростях 500кбит/с, 1мбит/с, 2 Мбит/с при различных уровнях мощности.
Полученные результаты позволяют говорить о совместимости ПО для РМ и УМ, слаженной совместной работе самих модулей, и уверенной передаче данных как на открытой местности, так и в условиях закрытых лабораторных помещений, при соответствующей мощности сигнала.
5. Краткое описание работ по третьему этапу
На третьем этапе НИОКР на основании разработанных ранее требований и выбранного решения для УМ, был выбран сенсорный модуль на основе интерфейса one-wire, легко агрегируемого с портами SPI, размещенными на плате радиомодуля, на примере температурного датчика. Для выбранного модуля было разработано тестовое программное обеспечение, произведена отладка работы ПО с температурным датчиком. Также был осуществлен контроль совместимости ПО для РМ и УМ, и проведена серия экспериментов для отладки совместной работы регистрирующей подсистемы и управляющего модуля.
В предыдущих этапах было выбрано решение для УМ на основе платы разработки ООО «Лаб127», на которой распаяны разъёмы для работы по протоколу SPI, позволяющие как организовать взаимодействие платы с ПК так и с дочерними устройствами, такими как радиомодуль и регистрирующая подсистема.
Из существующих решений выбирались модули, совместимые с интерфейсом SPI, и обладающие минимальной стоимостью при обеспечении необходимой функциональности.
Из совместимых модулей был выбран температурный датчик, работающий по интерфейсу 1-wire фирмы Dallas Semiconductors DS-1820(см. рис. 5.1), при цене порядка 5 долларов, имеющий демонстрационный свободно доступный программный код, позволяющий осуществлять обмен данными в режиме реального времени
Для выбранного модуля были разработаны адаптирующие по конкретный микроконтроллер библиотеки настроек, описаны типы основных процедур передачи данных, которые далее были реализованы в виде комплексного ПО, зашиваемого в МК в виде части ПО для самого УМ.
Рис. 5.1. Температурный датчик DS-1820.
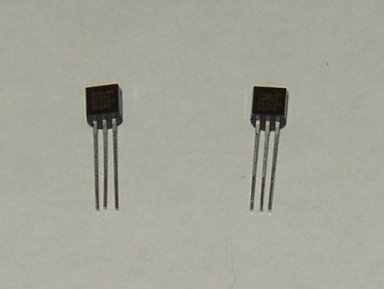
Рис. 5.2. Отладочный модуль, подключаемый к ПК.
Для тестирования системы был собран отладочный модуль, подключаемый к ПК, и организовывался обмен данными (см. рис. 5.2) в различных условиях. В ходе экспериментов проверялось адекватность работы ПО, вводились поправки на нормировку получаемой с датчиков температуры, отлаживались программные функции получения данных по интерфейсу one-wire.
Рис. 5.3. CodeVision AVR, фрагмент кода регистрирующей подсистемы.
Для тестирования и отладки была проведена серия опытов в различных условиях, имитирующих работу предполагаемого образца системы автоматизации эксперимента, с получением данных, передачей полезной информации в пакетах различной длины на битовых скоростях 500кбит/с, 1мбит/с, 2 Мбит/с, при различных уровнях мощности.
Полученные результаты позволяют говорить о совместимости ПО для РП и УМ, слаженной совместной работе самих модулей, и уверенном получении и передаче данных как на открытой местности, так и в условиях закрытых лабораторных помещений, при соответствующей мощности сигнала.
6. Краткое описание работ по четвёртому этапу
На четвертом этапе НИОКР на основании разработанных ранее ПО и схемотехнических решений, была произведена сборка и запуск системы, для опытной эксплуатации и отладки.
Отладка включала в себя как модификацию ПО, так и модернизацию алгоритмов работы схемотехнических решений.
В ходе тестовой эксплуатации были проведены испытания работы системы в различных условиях, имитирующих реальные лабораторные(см. рис. 6.1) и иные условия эксплуатации (см. рис. 6.2):
Для организации работы система агрегировалась как с блоком питания постоянного тока, так и с аккумуляторами ёмкостью 1100 мА*ч.
Тестовые испытания проводились как в автономном режиме работы – система автоматически регистрирует показания с температурного датчика, пересылает на узловую станцию, с сохранением в базу данных, так и в ручном режиме, когда пользователь произвольно выбирает момент регистрации данных.
Проверка системы проводилась в режимах «точка-точка», «точка-многоточка».
Автономный режим эксплуатации:
Система инициализируется, запускаются основные программные модули, рассылаются широковещательные пакеты обнаружения узловой точки (подключенной к серверу), после обнаружения узловой точки, синхронизируется внутреннее время модулей, выбирается очередность передачи данных от модулей до узловой точки, выбирается продолжительность режима энергосбережения («сон» между последовательными процедурами регистрации-передачи данных), адаптируется мощность сигнала. После инициализации регистрирующие узлы уходят в режим энергосбережения, и в соответствии со своим расписанием регистрируют и передают узловой точке данные.
Рис. 6.1. Регистрирующий узел, смонтированный на вакуумной установке.
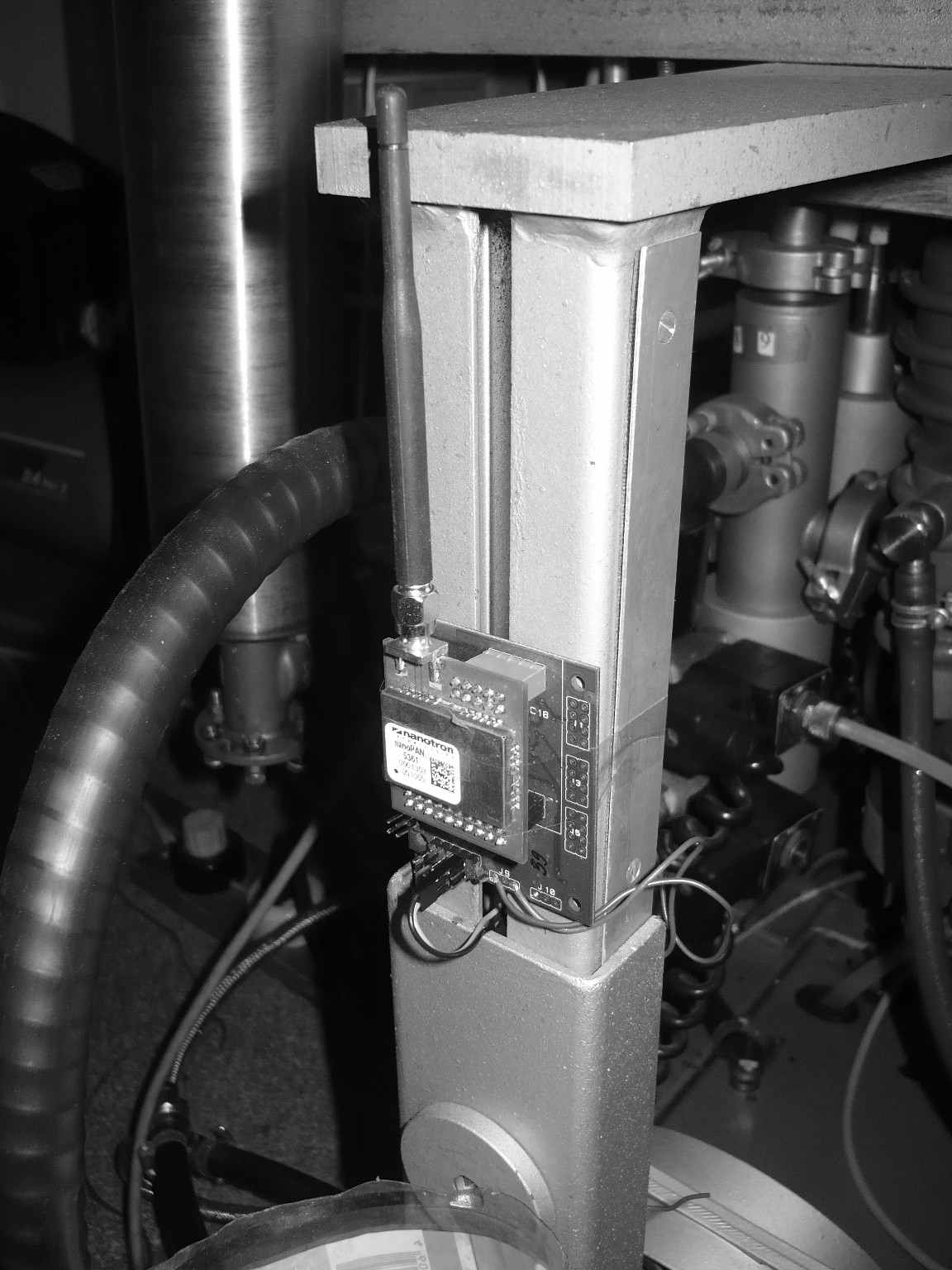
В таком режиме эксплуатация проводилась в лаборатории физики пылевой плазмы с размещением регистрирующих узлов среди экспериментального оборудования и вне здания, с размещением регистрирующих узлов в лесу, на расстоянии порядка 100м от здания.
В режиме ручного управления, после включения и самосинхронизации датчиков относительно узловой точки, регистрирующие модули не переходят в режим энергосбережения а остаются ждущем режиме, анализируя входящие управляющие пакеты, отвечая на них регистрацией данных с датчика и отсылкой пакетов данных на узловую точку.
Рис.2. Регистрирующий узел, закрепленный на дереве, в лесном массиве.

В таком режиме эксплуатация также проводилась как в лабораторных условиях, так и на открытой местности.
По результатам тестовой эксплуатации, в обоих режимах эксплуатации были предусмотрены дополнительные периоды автоматической самосинхронизации регистрирующих узлов относительно узловой точки, для ликвидации последствий несинхронности хода внутренних таймеров устройств.
Также был адаптирован алгоритм адаптации уровня передающего сигнала, для сокращения времени, требующегося на подстройку и увеличения эффективность работы.
Кроме того, в системное и прикладное ПО были внесены модули, отвечающие за использование управляющих пакетов данных, позволяющих по требованию пользователя получать информацию о работе системы, инициировать процесс самосинхронизации, проводить ручную настройку внутренних параметров регистрирующих узлов, не прерывая работу системы.
Рис. 6.3. Пример лога в командной строке при запуске и работе системы.
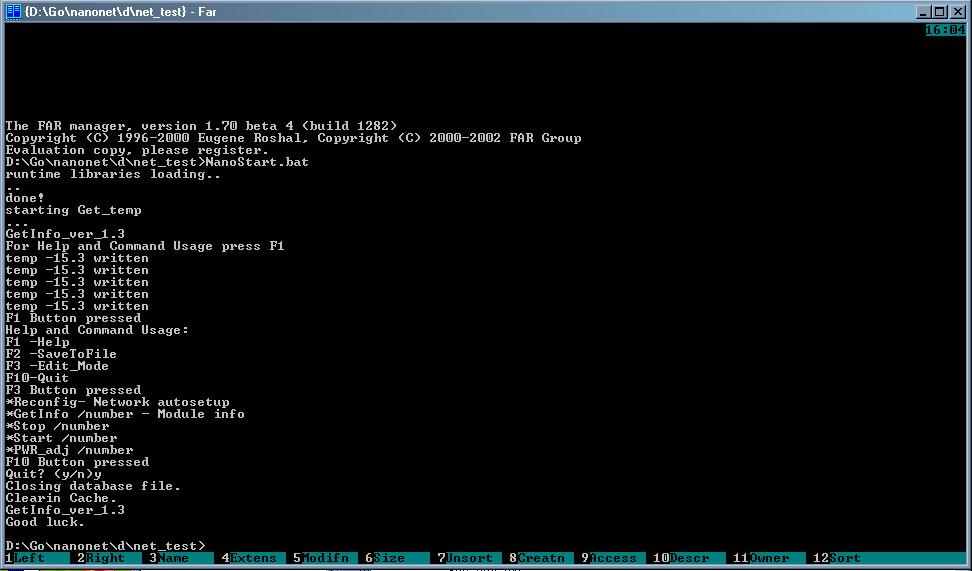
Разработанное прикладное ПО включило в себя все необходимые изменения, позволяя управлять работой системы реализуя все разработанные механизмы.
Управление работой системы реализовано в виде управляющих команд, результат выполнения которых выводится на экран пользователю и сохраняется в Log- файлах базы данных.
База данных не шифрованного типа, хранит информацию в текстовом виде, с использованием XML-форматирования и доступна к просмотру при помощи встроенных текстовых, табличных и редакторов баз данных (От «NotePad» до «MySQL»).
При опытной эксплуатации системы также фиксировался уровень энергопотребления регистрирующего модуля: при температурах от 10 до -10 градусов Цельсия энергопотребление достаточно низкое, чтобы обеспечивать работу модуля от двух аккумуляторов ёмкостью 1100мА*ч типоразмера АА, в течение минимум трёх месяцев. При дальнейшем понижении температуры (испытания проводились вплоть до -30 градусов Цельсия) полезная ёмкость аккумуляторов резко снижается, при этом энергопотребление самого модуля меняется слабо.
По результатам тестовой эксплуатации можно заявить, что система отвечает заявленным характеристикам по дальности работы, помехоустойчивости, энергопотреблению и функциональности.
7. Тестовая эксплуатация и доработки
На четвертом этапе НИОКР на основании разработанных ранее ПО и схемотехнических решений, была произведена сборка и запуск системы, для опытной эксплуатации и отладки.
Отладка включала в себя как модификацию ПО, так и модернизацию алгоритмов работы схемотехнических решений.
По результатам тестовой эксплуатации были предусмотрены дополнительные периоды автоматической самосинхронизации регистрирующих узлов относительно узловой точки, для ликвидации последствий несинхронности хода внутренних таймеров устройств.
Также был модернизирован алгоритм адаптации уровня передающего сигнала, для сокращения времени, требующегося на подстройку и увеличения эффективности работы.
Кроме того, в системное и прикладное ПО были внесены модули, отвечающие за использование управляющих пакетов данных, позволяющих по требованию пользователя получать информацию о работе системы, инициировать процесс самосинхронизации, проводить ручную настройку внутренних параметров регистрирующих узлов, не прерывая работу системы.
По результатам тестовой эксплуатации можно заявить, что система отвечает заявленным характеристикам по дальности работы, помехоустойчивости, энергопотреблению и функциональности.
8. Использованные компоненты, и анализ результатов.
В ходе этапа были использованы:
Модуль NGW-100.
Программатор из комплекта разработчика AVR STK-500 Starter Kit.
Модуль управляющей платы с МК ATMega 32L, разработки lab127.
Модуль NanoPan 5361 RF TM.
Переходник RS-232-SPI собственного изготовления, для подключения управляющей платы к программатору.
Программная среда разработки CodeVision AVR, AVR Studio, компонента WinAVR.
Модуль температурного датчика производства Dallas Semiconductors –DS1820.
Свободно распространямый демонстрационный код к температурному датчику, технические регламенты на программирование МК ATMega 32L и DS-1820.
Аккумуляторы типоразмера АА, ёмкостью 1100мА*ч и лабораторный БП с напряжением питания 3В при токе 0.01А.
Ранее было заявлено, что система сможет осуществлять сбор информации на расстояниях до 70 метров в помещениях и свыше 500 метров на открытых пространствах, на скоростях до 2Мбит/с с энергопотреблением порядка милли- и микроампер.
Разработанный образец по результатам замеров в ходе опытной эксплуатации показал параметры соответствующие ранее заявленным. Максимальное число опрашиваемых системой узлов равно 128 и ограничено программными средствами, с возможностью дальнейшего масштабирования.
В ходе разработки было разработано несколько программных модулей, обслуживающих соответствующие схемотехнические решения и нужды пользователя:
ПО для управляющего модуля
ПО для радиопередающего модуля
ПО для сенсорной части
ПО для взаимодействия с ПК
ПО пользователя, включающее в себя средства отладки и мониторинга сети.
Программный код разрабатывался на основе свободно распространяемого ПО с использованием некоммерческих средств разработки.
Таким образом можно заявить, что в результате работы за год были выполнены поставленные задачи. Опытная эксплуатация выявила ряд недостатков, которые были устранены в ходе отладки.
Разработанные модули системы показали полную работоспособность и соответствие заявленным требованиям, а поставленные эксперименты показали согласованную работу узловых точек и регистрирующих узлов под управлением разработанного ПО.
9. Внедрение системы и дальнейшее развитие проекта
Разработанная система была развёрнута в лаборатории пылевой плазмы физико-технического факультета Петрозаводского государственного университета.
В настоящий момент система стабильно работает и фиксирует данные о температуре плазмы в составе АРМ «Плазменный кристалл».
В ходе разработки системы были наработаны новые алгоритмы сбора, передачи и обработки данных, создано уникальное ПО, которое в дальнейшем может быть адаптировано для использования в беспроводных сенсорных сетях сбора данных.
По результатам выполнения проекта подготовлена заявка на разработку мобильно беспроводной системы в рамках программы «СТАРТ», заявка 10-2-Н1.5-0076 (см. протоколы вскрытия и рассмотрения по лоту 1 на сайте ссылка скрыта ), в настоящий момент ведутся переговоры с возможными международными партнерами о совместных НИОКР в данной области.
10. Выводы
В результате проделанной работы по второму году и проекту в целом:
- Разработаны новые алгоритмы сбора, передачи и анализа данных.
- Разработано уникальное системное и прикладное ПО.
- Разработанная система развёрнута в лаборатории пылевой плазмы ФТФ ПетрГУ.
- Подготовлена документация на использование системы.
- Подготовлена заявка на создание беспроводной мобильной системы сбора данных на конкурс «СТАРТ 2010».
- Инициированы переговоры с потенциальными партнерами о выполнении совместных НИОКР в данной области.
Результаты работ по второму году проекта показывают соответствие разработанной системы заявленным требованиям.
Выполненные работы полностью соответствуют техническому заданию и календарному плану НИОКР №______