
Совершенствование технологии раздачи сухих кормов с разработкой качающегося транспортера
| Вид материала | Автореферат |
- Инструкция по охране труда № при приготовлении и раздаче кормов, 1057.29kb.
- Пленки для упаковки стиральных порошков, сухих кормов, удобрений, 252.3kb.
- Косолапова Валентина Геннадьевна совершенствование чёрно-пёстрого скота на основе улучшения, 768.05kb.
- 10 раз, труда в раз, себестоимости зерна и кормов для молочного животноводства в раза, 131.11kb.
- Влияние экструдирования и химического способа "защиты" протеина кормов на обмен веществ, 458.71kb.
- Липаев В. В. Управление разработкой программных средств: Методы, стандарты, технология, 253.42kb.
- Информатика и ЭВМ в психологии, 322.7kb.
- Критерии оценки исследовательских работ социально-гуманитарного цикла, 63.81kb.
- Бланк заказа ленточного транспортёра, 48.3kb.
- Ное положение на рынке фасовочного оборудования для сухих строительных смесей и материалов,, 144.32kb.
На правах рукописи
Кропоткин Олег Николаевич
СОВЕРШЕНСТВОВАНИЕ ТЕХНОЛОГИИ РАЗДАЧИ СУХИХ КОРМОВ С РАЗРАБОТКОЙ КАЧАЮЩЕГОСЯ ТРАНСПОРТЕРА
Специальность 05.20.01 - технологии и средства механизации
сельского хозяйства
АВТОРЕФЕРАТ
диссертации на соискание ученой степени
кандидата технических наук
Мичуринск-наукоград 2010
работа выполнена в Государственном научном учреждении –
Всероссийский научно-исследовательский институт использования техники и нефтепродуктов Российской академии
сельскохозяйственных наук (ГНУ ВНИИТиН Россельхозакадемии)
| Научный руководитель: | Кандидат технических наук, доцент Михеев Николай Владимирович |
| Официальные оппоненты: | Доктор технических наук, профессор Мухин Виктор Алексеевич Кандидат технических наук, доцент Хмыров Виктор Дмитриевич |
| Ведущая организация: | Тамбовский государственный технический университет |
защита состоится 25 ноября 2010 года в 1200 на заседании диссертационного совета ДМ 220.041.03 при Федеральном государственном образовательном учреждении Мичуринского государственного аграрного университета по адресу: 393760, г. Мичуринск, Тамбовская обл., ул. Интернациональная, д. 101, зал заседаний диссертационного совета.
С диссертацией можно ознакомиться в библиотеке Мичуринского государственного аграрного университета.
Автореферат разослан 22 октября 2010 г. и размещен на сайте http://www.mgau.ru
| Ученый секретарь диссертационного совета, кандидат технических наук, доцент | Н.В. Михеев |
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность темы. Потребление мяса в России значительно ниже медицински обоснованных норм. Государственной программой развития сельского хозяйства до 2012 г. предусмотрено довести потребление мясопродуктов до 70 кг на одного человека. Выполнение этой напряженной программы возможно за счет, в частности, развития малого и среднего бизнеса в наиболее эффективной отрасли животноводства – свиноводстве. Для экономичного производства свинины на фермах с ограниченным поголовьем необходимы современные средства механизации раздачи кормов, широко используемые за рубежом. Однако, зарубежные технологии чрезвычайно дороги, требуют высокой квалификации персонала, соблюдения условий хранения кормов, обладают избыточной производительностью применительно к свиноводческим фермам до 1000 голов, что снижает их уровень использования.
Вместе с тем, известные отечественные автоматизированные системы раздачи кормов содержат значительный потенциал модернизации. Поиск этих резервов, направленный на упрощение конструкций элементов системы и удешевление их производства составляет актуальность настоящей работы.
Работа выполнялась по заданию головной организации в области механизации технологических процессов в животноводстве (ГНУ ВНИИМЖ Россельхозакадемии) – «Разработать систему автоматизированного распределения корма внутри помещений».
Цель работы. Повышение эффективности автоматизированной системы раздачи сухих кормов свиньям путем совершенствования транспортирующего органа, самокормушки и средств контроля уровня корма.
Объект исследований. Процесс функционирования автоматизированной системы раздачи сухих кормов.
Предмет исследований. Закономерности транспортировки, распределения и истечения кормов в корыта из бункеров самокормушек.
Методы исследований. Теоретические исследования базируются на основе законов математики, физики и теоретической механики. Экспериментальные исследования проводились на экспериментальных образцах качающегося транспортера, самокормушки и датчиков контроля уровня корма в соответствии с типовыми методиками и отраслевыми стандартами. Результаты экспериментальных исследований обрабатывались на персональном компьютере.
Научная новизна
- теоретически обоснованы новые конструктивно-технологические схемы базовых элементов автоматизированной системы раздачи кормов - качающегося транспортера, самокормушки, датчиков контроля уровня;
- определены взаимосвязи расходных характеристик качающегося транспортера с величиной угла наклона кормопровода, частоты и амплитуды тянущих воздействий привода на кормопровод, высоты корма в загрузочном бункере, расстояния его транспортировки;
- определены конструктивные параметры самокормушки с шарнирно закрепленным бункером и исследованы закономерности зависания корма в зависимости от времени его выдержки, влажности и величины усилия подпрессовки;
- обоснованы конструктивные параметры датчиков контроля верхнего и нижнего уровней корма в самокормушке, исследована взаимосвязь погрешности контроля с интенсивностью и смещением подаваемого потока.
Практическая значимость работы заключается в разработке структурно-технологической схемы стационарной автоматизированной системы кормораздачи, обеспечивающей улучшение качественных характеристик кормления, повышение технологической надежности, упрощение и удешевление конструкции.
Реализация результатов исследований. На основе результатов исследований разработана автоматизированная технология раздачи сухих кормов для свиноферм на 500 и 1000 голов. Конструкторская документация передана головной организации по механизации технологических процессов в животноводстве – ГНУ ВНИИМЖ Россельхозакадемии. Разработанные качающиеся транспортеры внедрены в ОНО ОПХ «Ракшинское» Моршанского района Тамбовской области.
Апробация работы. Основные положения диссертации были доложены и одобрены на Международной научно-практической конференции «Перспективные технологии и технические средства в АПК» (Мичуринск 2007 г.), на конференции молодых ученых в ГНУ ВИИТиН 2007 г, на XII Международной научно-практической конференции «Научно-технический прогресс в животноводстве – стратегия машинно-технологического обеспечения производства продукции животноводства на период до 2020 г.» (Москва – Подольск, ВНИИМЖ Россельхозакадемии 2009 г.), на заседаниях Ученого совета ГНУ ВНИИТиН Россельхозакадемии 2007-2009 гг.
Публикация результатов работы. По материалам диссертации опубликовано 20 работ, в том числе 2 работы в изданиях, рекомендованных ВАК РФ. Техническая новизна работы подтверждена тремя решениями о выдачи патентов РФ на изобретения.
На защиту выносятся следующие основные положения:
- теоретический анализ транспортирующей способности перспективных рабочих органов;
- конструктивно-технологическая схема и параметры качающегося транспортера с симметричным приводом тянущего воздействия на полуветви кормонесущих желобов, размещенных на гибких подвесках;
- конструктивно-технологическая схема и параметры самокормушки с датчиками контроля нижнего и верхнего уровней корма в ней с шарнирно закрепленным бункером в верхней части, исключающим зависание кормов за счет динамического воздействия животных на нижнюю часть;
- закономерности изменения производительности качающегося транспортера от длины транспортирования, частоты колебаний вибропривода, амплитуды колебаний и угла наклона кормонесущего органа;
- закономерности уплотнения корма в бункере самокормушки и его истечение от времени выдержки, влажности корма и величины усилия подпресовки;
- взаимосвязь погрешностей контроля уровня корма в самокормушке с интенсивностью подачи корма с асимметрией потока.
Структура и объем работы. Диссертация состоит из введения, пяти глав, общих выводов, списка использованных источников и приложений. Работа изложена на 190 листах, содержит 118 страниц основного текста, 74 рисунка, 15 таблиц и 9 приложений. Список использованных источников включает 123 наименования.
СОДЕРЖАНИЕ РАБОТЫ
Во введении обоснована актуальность темы, отмечена ее связь с программой ГНУ ВНИИМЖ Россельхозакадемии и изложены основные научные положения, выносимые на защиту.
В первой главе «СОСТОЯНИЕ ВОПРОСА, ЦЕЛЬ И ЗАДАЧИ ИССЛЕДОВАНИЙ» представлен анализ проблем производства свинины, способов кормления, эффективности функционирования автоматизированных систем раздачи сухих кормов и их элементов.
Повышению эффективности функционирования автоматизированных систем раздачи кормов посвящены работы отечественных и зарубежных ученых: Морозова Н.М., Артюшина А.А., Грачевой Л.И., Коба В.Г., Сыроватка В.И., Завражнова А.И., Вагина Б.И., Брагинеца Н.В., Булавина С.А., Тишанинова Н.П., Коновалова В.В., Доценко С.М.и др. В их работах обоснованы принципы построения структурно-технологических схем кормораздатчиков, определены рациональные режимы работы и параметры функциональных блоков, выявлены основные резервы повышения эксплуатационно-технологических показателей.
Выполненный анализ работ позволил установить, что для раздачи сухих кормов наиболее перспективны стационарные кормораздатчики с тросо-шайбовым и спиральным безосевым рабочими органами. Однако эти кормораздатчики дороги и в условиях межотраслевого диспаритета цен, имеют узкие границы применения по объемам и эффективности производства. Установлено, что для малых ферм необходимо совершенствование систем раздачи сухих кормов в части упрощения их конструкции и удешевления производства. Основное направление совершенствования систем раздачи сухих кормов заключается в возможности применения качающихся транспортеров с симметричным виброприводом тянущего воздействия на кормонесущие желоба, снабженных возвратными пружинами и размешенных на гибких подвесках для распределения кормов по фронту и самокормушек со средствами контроля корма в них.
Исследования Преображенского П.А., Каптура З.Ф., Спиваковского А.О., Дьячкова В.К., Зуева Ф.Г., Красникова В.В. и других авторов по процессам транспортировки и распределения сыпучих материалов не позволяют в полной мере реализовать резервы модернизации автоматизированной системы раздачи кормов.
ЗАДАЧИ ИССЛЕДОВАНИЙ
- исследовать аналитическим путем взаимосвязь расходных характеристик перспективных транспортирующих органов с их параметрами, продолжительностью заполнения самокормушек и кратностью включения;
- обосновать теоретически параметры: качающегося транспортера с тяговым воздействием привода на кормонесущий желоб; самокормушки с шарнирно закрепленным бункером, датчика контроля уровня корма с изолированным кожухом;
- исследовать экспериментально расходные характеристики качающегося транспортера в зависимости от угла наклона кормопровода, частоты и амплитуды колебаний, расстояния транспортирования корма;
- исследовать процесс сводообразования корма в бункере самокормушки в зависимости от времени его выдержки, влажности и величины усилия подпрессовки.
- исследовать рабочий процесс датчика контроля уровня корма в самокормушке.
Во второй главе «ТЕОРЕТИЧЕСКОЕ ОБОСНОВАНИЕ ПАРАМЕТРОВ СИСТЕМЫ РАЗДАЧИ СУХИХ КОРМОВ» предложена гибкая авторегулируемая с двухпозиционным срабатыванием система управления. Она построена из условий: а) при симметричном приводе полуветвей транспортера интенсивность поедания корма под каждой из них отличается несущественно; б) управление процессом возможно при контроле уровня корма в крайней (дальней от накопителя) кормушке без риска нарушения постоянного доступа к корму; в) отклонения контроля уровня корма в самокормушках и разницы в интенсивности поедания корма по станкам могут быть компенсированы резервом полезного объема самокормушек.



КС – крайняя самокормушка; ДВУ – датчик верхнего уровня; ДНУ – датчик нижнего уровня; БУ – блок управления; ТР – транспортер; УО – управляемый объект; ПУ – подсистема управления; ИС – информационная система; ИО – исполнительный орган; W(t) – производительность транспортера; Нб,σq,Фк – высота корма в бункере-накопителе, среднеквадратическое отклонение интенсивности поедания корма животными и физико-механические свойства кормов (внешние воздействия); Нв(t), Нн(t) – действительные значения верхнего и нижнего уровней корма в самокормушке; ±ΔНв(t), ±ΔНн(t) – управляющие воздействия; Н0в(t), Н0н(t) – нормируемые значения верхнего и нижнего уровней корма в самокормушке; nст – число станков; qжс – средняя интенсивность поедания корма животными в станке
Рисунок 1 – Схема управления процессом раздачи сухих кормов
Принцип действия подсистемы управления: при достижении уровня корма в крайней самокормушке (Н0н(t)±ΔН0н(t)) срабатывает датчик нижнего уровня, подает сигнал на БУ и транспортер включается; по мере заполнения крайней самокормушки до уровня (Н0в(t)±ΔН0в(t)) срабатывает датчик верхнего уровня, подает сигнал на БУ и транспортер отключается.
Анализ применимости спирального транспортирующего органа показал, что уже при диаметре трубы 0,07 м и шаге спирали 0,04 м продолжительность суточного включения при обслуживании 1000 голов свиней составляет лишь 0,28…0,56 часа. Это крайне низкий уровень использования транспортера по времени при весьма высокой цене. Транспортирующая способность предложенного качающегося транспортера определялась на основе анализа баланса сил, действующих на частицу корма, рисунок 2.

1 – кормонесущий желоб; 2 – подвески; 3 – вибропобудитель
Рисунок 2 – Расчетная схема качающегося транспортера (угол α условно увеличен относительно реального значения)
Из рисунка 2 видно, что при прямом и обратном ходе кормонесущего желоба воздействия на частицу корма сил инерции (Fи) и трения (Fтр) частично нивелируются. Движение частицы корма по желобу происходит от воздействия однонаправленной (вниз) скатывающей силы (Fск).
Поэтому производительность (W) качающегося транспортера можно определить по формуле:
W=60NэКтhкbжρ
 , (1)
, (1)где Nэ – частота вращения эксцентрика вибропривода, об/мин;
Кт – коэффициент текучести материала в желобе; hк – высота слоя корма в желобе, м; вж – ширина желоба, м; α – угол наклона желоба, град;
 - величина пути перемещения частицы корма.
- величина пути перемещения частицы корма.Расчет по формуле (1) для (Nэ=400 об/мин; hк=0,04 м; вж=0,08 м; ρ=600 кг/м3) показывает, что W=264 кг/ч. Принятые режимы работы и параметры качающегося транспортера вполне могут быть обеспечены в реальных условиях при снижении материалоемкости и обеспечении простоты конструкции транспортирующего органа. При этом для обеспечения 1000 голов свиней с суточной потребностью в комбикормах 3000 кг два качающихся транспортера (4 полуветви при двухрядном размещении станков и самокормушек) необходимо их 3-х разовое включение с продолжительностью работы в цикле – 1 час, что не противоречит зоотехническим требованиям. Для обслуживания меньшего состава поголовья условия работы качающегося транспортера будут более облегченными.
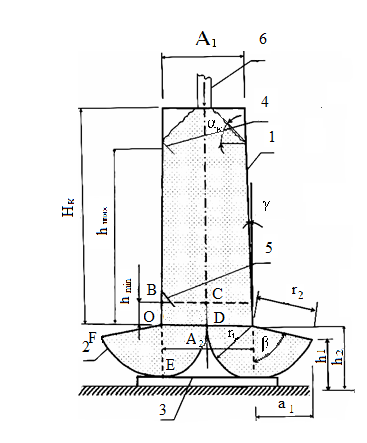
При обосновании параметров самокормушки ряд размерных характеристик корыта 2 (Рисунок 3) определен с учетом зоотехнических требований: а1 = 0,3 м; h1 = 0,165 м. Для указанных определяющих размеров корыта 2 производные его размеры будут: r1 = 0,15 м; h2 = 0,2 м; r2 = 0,31 м; β = 750.
Если принять высоту бункера 1, равную 1 м, то необходимость размещения датчиков контроля верхнего 4 и нижнего 5 уровней корма будет определять размеры: hmin = 0,1 м; hmax = 0,8 м. ширина бункера 1 у основания А2 = 2 r1 = 0,3 м.
Для предотвращения зависания корма в бункере 1 его стенки должны быть расположены под отрицательным углом наклона (γ > 0) относительно центральной оси. Поэтому А2>А1 = 0,26 м.
С учетом принятых и обоснованных параметров самокормушки необходимо было проверить:
- достаточность минимального количество (Qmin) корма в крайней кормушке по условию:
Qmin 3σqtц + Qp, (2)
где σq – среднеквадратическое отклонение интенсивности поедания (qжс) корма группами животных, кг/с; tц – время цикла использования самокормушек от hmax до hmin (время между включениями транспортера), с; Qp – резервное количество корма в кормушке (рисунок 3), кг
Д
 ля принятых и обоснованных параметров самокормушки, следует, что: Qmin = 80, 4 кг. Чтобы оценить величину tц (время между включениями транспортера) и затем – правую часть соотношения (2), определяли количество корма в бункере (Qб), находящуюся выше уровня hmin:
ля принятых и обоснованных параметров самокормушки, следует, что: Qmin = 80, 4 кг. Чтобы оценить величину tц (время между включениями транспортера) и затем – правую часть соотношения (2), определяли количество корма в бункере (Qб), находящуюся выше уровня hmin:
З
1 – бункер; 2 – корыто; 3 – салазки; 4 – датчик верхнего уровня; 5 – датчик нижнего уровня; 6 – питатель
Рисунок 3 - Общий вид автоматизированной самокормушки
ная значения параметров самокормушки, получили для (к=450) Qб=90 кг.
Из выполненного анализа видно, что величина QБ на 7 % превышает суточную потребность животных (28 гол.), содержащихся в одном станке и обслуживаемых одной самокормушкой при норме кормления 3 кг/гол.
Очевидно, что для оценки tц необходимо брать одноразовое заполнение кормушек в сутки с учетом доли времени активного кормления животных.
Поэтому для W = 750 кг/ч величина:
tц = (0,75Тс – tвк)∙3600 =61200с, (4)
где – tвк продолжительность включенного состояния транспортера, ч; Tc=24 часа
Принимая во внимание, что tвк = t3 = 3600 с (t3 продолжительность разового заполнения кормушек) при W = 750 кг/ч, правая часть соотношения (2) будет справедлива для σq = 5%:
3σq qжс tц + Qр = qжс(3σq tц + t3) =16,6 кг (5)
Из проведенного анализа следует, что:
- для технологически обоснованных параметров корыта величина Qmin почти в 5 раз превышает уровень необходимого резервирования корма на неравномерность его поедания животными в различных станках (самокормушках) при σq = 5%;
- доля резерва, приходящаяся на скармливание корма в процессе заполнения (1 час), составляет 28% при σq = 5%;
- для σq = 5% максимальная разница интенсивности поедания корма животными, содержащимися в разных станках составляет 15%.
При суточной величине времени активного кормления (0,75 Тс = 18 часов) расчетные циклы времени между заполнениями кормушек составляют 17,8 и 5 ч, которые соответствуют 1-но, 2-х и 3-х разовому заполнению в сутки. Сохраняя продолжительность разового заполнения кормушек (t3 = 1 ч) во всех случаях изменения кратности, возможно использовать питающие транспортеры с производительностью соответственно 750, 500 и 250 кг/ч.
Обоснование параметров датчика контроля уровня корма в самокормушке выполнено из условия равновесия коромысла 6, рисунок 4.
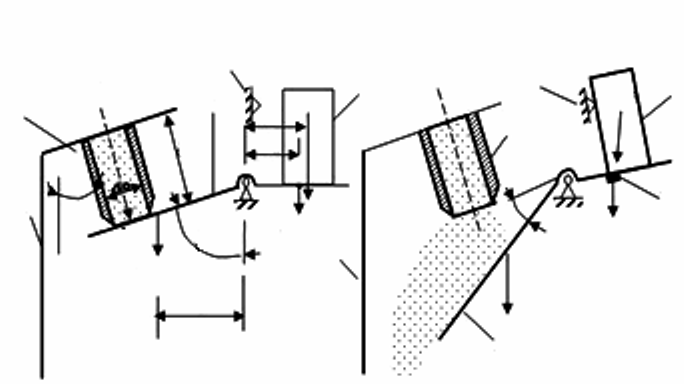

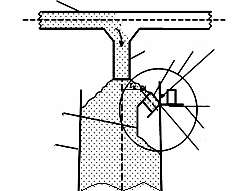
1 – кормонесущий желоб; 2 – отвод; 3 – бункер самокормушки; 4 – защитный кожух; 5 – отвод; 6 – коромысло; 7 – МУК; 8 – упор; 9 – шарнир; 10 – противовес
рисунок 4 – Расчетная схема датчика контроля уровня
На рисунке 4 показан верхний датчик уровня, работа которого осложнена большей неопределенностью его взаимодействия с сыпучим материалом (кормом). Условие равновесного состояния коромысла 6 можно записать в следующем виде:
F(ℓ1/sin1 +d0/2) - m1gℓ1 = m2gℓ2 + m3gℓ3 + Мтр, (6)
где F – сила давления корма на плоское коромысло 6, H; m1 – масса правой части коромысла, кг; m2 – масса правой части коромысла совместно с противовесом, кг; m3 – масса магнитоуправляемого контакта (МУК), кг; Мтр – момент трения в шарнире. Срабатывание датчика на отключение качающегося транспортера обеспечивается при условии:
πd02l0ρqKpcosβ>F (7)
Условие возврата коромысла в исходное положение можно представить в следующем виде для ситуации, когда корм на коромысле отсутствует:
g(m2 ℓ2 + m3 ℓ3)cosγ > m1gSin (1 – γ). (8)
на основе изложенных теоретических предпосылок обоснованы параметры коромысла, отвода, защитного кожуха.
В третьей главе «МЕТОДИКА ЭКСПЕРИМЕНТАЛЬНЫХ ИССЛЕДОВАНИЙ» изложена программа экспериментальных исследований, приводится описание лабораторных установок и методики проведения опытов.
Программой экспериментальных исследований предусматривалось определение: влияния конструктивно-режимных параметров качающегося транспортера на производительность; взаимосвязи процессов усадки корма и последующего сводообразования на технологическую надежность самокормушки; стабильности срабатывания верхнего датчика в зависимости от интенсивности и асимметрии подаваемого потока. Для реализации программы исследований были разработаны и изготовлены экспериментальные установки, рисунок 5.
В качестве измерительных средств использовались приборы частотного преобразователя, весы ВЭЛ-500, мерные линейки, стандартный решетный классификатор. Влажность корма определяли по известной методике выпариванием влаги из проб корма в сушильном шкафу. Обработку результатов экспериментов проводили с использованием традиционных статистических методов. Насыпная плотность, влажность и модуль помола определялись по методикам, изложенным в ГОСТ–10840-64; 8770-58; 13586.5-85.

а)

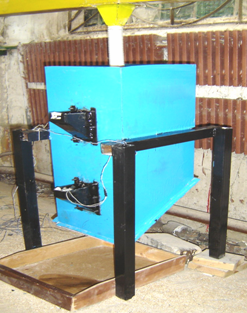
б) в)
а) – качающийся транспортер, б) – самокормушка, в) – установка для исследований датчиков уровня корма в самокормушке
Рисунок 5-Экспериментальные установки
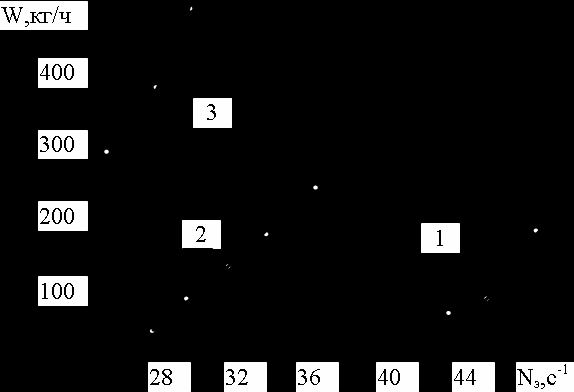
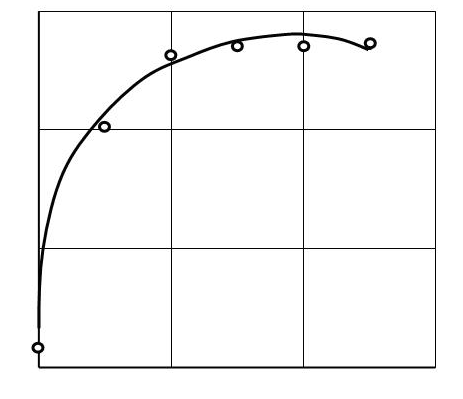
В четвертой главе «РЕЗУЛЬТАТЫ ЭКСПЕРИМЕНТАЛЬНЫХ ИССЛЕДОВАНИЙ» выявлены основные параметры качающегося транспортера, исследованы процессы истечения и условия зависания корма в самокормушке, изучены процессы срабатывания датчиков контроля уровня. На первом этапе экспериментальных исследований были определены зависимости производительности качающегося транспортера от угла наклона желоба для различных величин эксцентриситета и частоты вращения эксцентрика, рисунок 6.
Из рисунка 6 видно, что в диапазоне изменения эксцентриситета (ε) вибропобудителя от 5 до 15 мм производительность качающегося транспортера увеличивается в 7 раз при вынужденном снижении частоты его вращения (Nэ) с 45 с-1 до 29 с-1. Влияние частоты вращения эксцентрика на производительность в наибольшей степени проявляет себя при росте угла наклона (α) кормонесущего органа к горизонту. При α = 1,450 увеличение частоты колебаний эксцентрика на 17% сопровождается ростом производительности в 1,73 раза.

0

а) б)
а) 1 - ε=5 мм, Νэ = 45с-1;
2 - ε=10мм, Νэ = 33,36с-1;
3 - ε=15мм, Νэ = 29,1с-1.
б) 1 - ε = 5мм, α = 0°;
2 - ε = 10мм, α = 0°;
3- ε = 15мм, α = 1,45°.
Рисунок 6 - Зависимость производительности (W) качающегося транспортера от частоты колебаний (Nэ), угла его наклона (α) и эксцентриситета (ε)
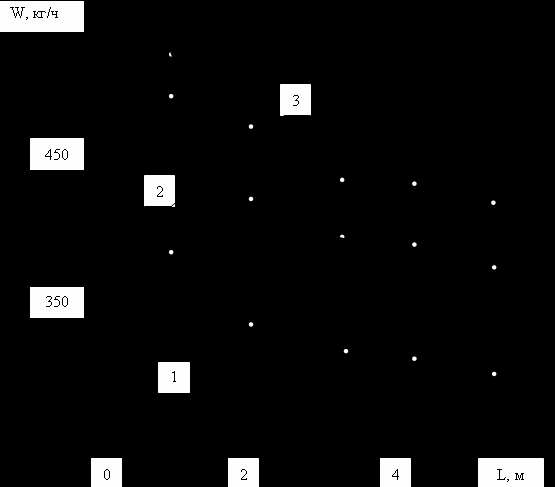
0
1) α = 0°; 2) α = 1°; 3) α = 1,7°
Рисунок 7 – Зависимости производительности (W) качающегося транспортера от длины транспортирования (L), от высоты материала (Н) в загрузочном бункере при Nэ=29,1с-1, ε=15мм.
Зависимость W качающегося транспортера от длины транспортирования при ε=15мм усиливается с уменьшением угла наклона желоба: при α = 1,70 - в 1,16…1,19 раза; при α = 10 - в 1,25…1,28 раза; при α = 0° W уменьшается в 1,84 раза. Это свидетельствует о том, что нулевой угол наклона кормонесущего желоба к горизонту не приемлем для раздачи кормов в габаритных помещениях. Увеличение длины транспортирования корма > 5,5 м не сопровождается дальнейшим снижением производительности.
На втором этапе экспериментальных исследований, были исследованы процессы усадки корма, сводообразования и его истечения в корыто самокормушки. Влияние естественной усадки корма нормативной влажности на качество его истечения из бункера в корыто выявлено не было. Материал в корыто поступал стабильно без образования сводов по мере его отбора. Поэтому в дальнейшем использовалась искусственная подпрессовка и увлажнение корма для моделирования реальных условий производства.


Рисунок 8 – Влияние влажности исследуемого корма на площадь разрушения уплотненного слоя (ΔS) по мере отбора объема (ΔV).
При выдержке 24 ч и догружении кормового монолита массой Мг = 19,8 кг усадка увеличилась в 5 раз. Темпы усадки с ростом времени выдержки снижается от 1 мм/ч до 0,2 мм/ч. С ростом влажности до 21,37% величина его усадки возрастает в 3…4 раза, что приводит к формированию уплотненной поверхности и ее случайному разрушению при отборе корма из корыт, но темпы обрушения всегда опережают темпы отбора (Рисунок 8), что гарантирует технологическую надежность работы самокормушки.
В третьей серии экспериментов контролировались массы корма, подаваемого в бункер имитирующей самокормушки и выгружаемого из нее, а также масса, перетекающая в дополнительную емкость. Стабильность срабатывания верхнего датчика под воздействием стекающих слоев корма (при размыкании контактов реле (ЗКРВ)) характеризуется средним временем срабатывания tВср = 218,5 с, среднеквадратичным отклонением σt = 7,3 с и средней массой, загруженной в бункер МЗср = 22,77 кг при ее среднеквадратичном отклонении σ = 1,48 кг.
В
 ерхняя поверхность сформировавшегося монолита корма в бункере представляет собой смещенный относительно центра бункера конус, показанный на рисунке 9. Сформировавшийся конус характеризуется следующими средними размерами: acр = 89,8 мм при σa = 17,54 мм и bcр = 111,8 мм при σb = 19,03 мм; h1 = 88,67 мм при σh = 3,27 мм; h2 = 120,73 мм при σh = 4,43 мм и h3 = 185,2 мм при σh = 6,2 мм.
ерхняя поверхность сформировавшегося монолита корма в бункере представляет собой смещенный относительно центра бункера конус, показанный на рисунке 9. Сформировавшийся конус характеризуется следующими средними размерами: acр = 89,8 мм при σa = 17,54 мм и bcр = 111,8 мм при σb = 19,03 мм; h1 = 88,67 мм при σh = 3,27 мм; h2 = 120,73 мм при σh = 4,43 мм и h3 = 185,2 мм при σh = 6,2 мм. 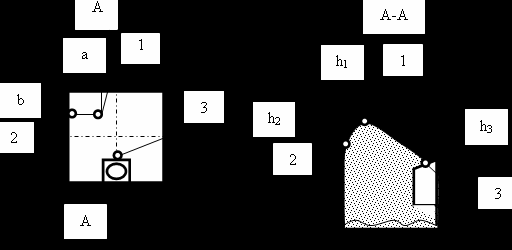
a, b – координаты вершины поверхности корма относительно стенок бункера; 1, 2, 3 – точки замера высоты от поверхности корма до верхней кромки бункера; h1, h2, h3 – замеряемые высоты; 4 – бункер.
Рисунок 9 – Схема замеров сформировавшей поверхности корма в бункере после отключения верхнего датчика
При работе датчиков контроля уровня корма среднеквадратичное отклонение накопленной массы не превышает 10%, что вполне перекрывается резервным объемом самокормушки. Полученные результаты свидетельствуют о стабильности срабатывания верхнего датчика. Результаты экспериментальных исследований подтверждают обоснованность выбора конструктивно-технологической схемы датчиков контроля уровня корма в самокормушке.
В пятой главе «ЭКОНОМИЧЕСКАЯ ОЦЕНКА РЕЗУЛЬТАТОВ ИССЛЕДОВАНИЙ И РАЗРАБОТОК» была дана экономическая оценка предложенной системы автоматизированной раздачи сухих кормов в сравнении с зарубежным аналогом по эксплуатационным затратам. Оценка показала, что сравниваемый вариант проигрывает базовому по затратам электроэнергии из-за меньшей производительности, а по затратам на оплату труда, амортизацию и текущий ремонт имеет существенные преимущества. Годовой экономический эффект от использования предложенной системы раздачи сухих кормов (в расчете на 1000 голов свиней) составляет 353677 руб. за счет экономии эксплуатационных затрат в сравнении с технологией фирмы Big Dutchman.
ОБЩИЕ ВЫВОДЫ
1. Одной из основных причин низкого уровня производства и потребления мяса в России (53 кг/год на 1 человека) является технологическое отставание животноводства. Выполнение государственной программы до 2012 года о доведении производства мяса на душу населения до 70 кг может быть обеспечено за счет развития наиболее перспективной подотрасли животноводства - свиноводства на новой технологической основе.
2. Уровень технологии в значительной мере определяют средства механизации процесса раздачи кормов – наиболее трудоемкого и значимого относительно конечных результатов производства. Перспективные зарубежные средства механизации этого процесса дороги, требуют высоких стандартов качества обслуживания и свойств транспортируемых кормов, обладают избыточной производительностью применительно к малым фермам.
3. Проведенный анализ позволил выявить существенные технические и экономические резервы от применения для раздачи кормов качающихся транспортеров с симметричным виброприводом тянущего воздействия на кормонесущие желоба, снабженных возвратными пружинами и размещенных на гибких подвесках с производительностью полуветви около 250 кг/ч, которые подают корм в модернизированные, технологически надежные самокормушки упрощенной конструкции.
4. Двухсторонняя самокормушка длинной 1 м с переменным радиусом корыт (0,15…0,31м) и высотой резервного слоя 0,1 м обеспечит постоянный доступ животных к корму по всему фронту кормления даже при двухкратной разнице интенсивности поедания корма в станках при трехкратном включении качающегося транспортера (на 1 час каждый раз), что создает предпосылки контролировать корм только в крайних кормушках ряда – существенно удешевить систему раздачи кормов.
5. В диапазоне изменения эксцентриситета (ε) вибропобудителя от 5 до 15 мм производительность качающегося транспортера увеличивается в 7 раз даже при вынужденном снижении частоты его вращения (Nэ) с 45 с-1 до 29 с-1.
6. Влияние частоты вращения эксцентрика на производительность в наибольшей степени проявляет себя при росте угла наклона (α) кормонесущего органа к горизонту. При α = 1,450 увеличение частоты колебаний эксцентрика на 17% сопровождается ростом производительности в 1,73 раза.
7. Зависимость производительности (W) качающегося транспортера от длины транспортирования усиливается с уменьшением α: при α = 1,70 - в 1,16…1,19 раза; при α = 10 - в 1,25…1,28 раза; при α = 0° W уменьшается в 1,84 раза. Увеличение длины транспортирования корма > 5,5 м не сопровождается дальнейшим снижением производительности.
8. Риск зависания корма влажностью 13,4% в бункере предложенной самокормушки отсутствует. При выдержке 24 ч и догружении кормового монолита массой Мг = 19,8 кг усадка увеличилась в 5 раз. Темпы усадки с ростом времени выдержки снижается от 1 мм/ч до 0,2 мм/ч. С ростом влажности до 21,37% величина его усадки возрастает в 3…4 раза, что приводит к формированию уплотненной поверхности и ее случайному разрушению при отборе корма из корыт, но темпы обрушения всегда опережают темпы отбора, что гарантирует технологическую надежность работы самокормушки.
9. При работе датчиков контроля уровня корма среднеквадратичное отклонение накопленной массы не превышает 10%, что вполне перекрывается резервным объемом самокормушки.
10. Годовой экономический эффект от использования предложенной системы раздачи сухих кормов (на 1000 голов) составляет 353677 руб за счет экономии эксплуатационных затрат в сравнении с системой фирмы Big Dutchman. Срок окупаемости капитальных вложений - 3,96 года.
Основные положения диссертации изложены
в изданиях, рекомендованных ВАК:
1. Кропоткин О.Н. Электрифицированная тележка кормораздатчик [Текст] / Уткин А.А., Тишанинов Н.П., Амельянц А.Г, Кропоткин О.Н. // Сельский механизатор №5, 2009,с.30
2. Кропоткин О.Н. Автоматизированная установка раздачи корма для свиноферм [Текст]/ Тишанинов Н.П., Амельянц А.Г, Кропоткин О.Н. // Механизация и электрификация сельского хозяйства №5 2010, с.18-20
в других изданиях:
3. Кропоткин О.Н. Совершенствование автоматизированной системы раздачи сухих кормов [Текст]/ Михеев Н.В., Тишанинов Н.П., Кропоткин О.Н. //- Тамбов: ГНУ ВНИИТиН Россельхозакадемии, 2010. - с.115.
4. Кропоткин О.Н. Состояние и перспективы развития животноводства России [Текст]/ Тишанинов Н.П., Кропоткин О.Н. // Повышение эффективности использования сельскохозяйственной техники: Сборник науч. трудов ГНУ ВИИТиН, Вып. 9, 2006.
5. Кропоткин О.Н. Опыт производства свинины в ЗАО «Раненбургское» [Текст] / Кропоткин О.Н. // Повышение эффективности использования сельскохозяйственной техники: Сборник науч. трудов ГНУ ВИИТиН, Вып. 13, 2007, с. 67…76
6. Кропоткин О.Н. Производство комбикорма в ЗАО «Раненбургкомплекс» [Текст] / Кропоткин О.Н. // там же, с. 76…81
7. Кропоткин О.Н. Экспериментальные исследования качающегося транспортера [Текст] / Тишанинов Н.П., Амельянц А.Г., Кропоткин О.Н. // Перспективные технологии и технические средства в АПК: Матер. Междунар. науч.-практ. конф. ФГОУ ВПО МичГАУ, 2008, с. 72…75
8. Кропоткин О.Н. Обоснование параметров автоматизированной самокормушки для свиней [Текст] / Тишанинов Н.П., Кропоткин О.Н. // Повышение эффективности использования сельскохозяйственной техники: Сборник науч. трудов ГНУ ВИИТиН, Вып. 14, 2008, с. 72…82
9. Кропоткин О.Н. Обоснование конструкции датчика контроля уровня сыпучих материалов [Текст] / Тишанинов Н.П., Кропоткин О.Н. // там же, с. 82…91
10. Кропоткин О.Н. Блок автоматического управления процессом раздачи кормов [Текст] / Амельянц А.Г., Кропоткин О.Н. // там же, с. 91…94
11. Кропоткин О.Н. Методика исследований рабочего процесса качающегося транспортера [Текст] / Амельянц А.Г., Кропоткин О.Н. // там же, с. 94…111
12. Кропоткин О.Н. Влияние параметров шибера, длины транспортирования комбикорма и частоты колебания желоба на степень его заполнения и производительность [Текст] / Тишанинов Н.П., Амельянц А.Г., Портнов Н.Е., Кропоткин О.Н. // там же, с. 112…129
13. Кропоткин О.Н. Анализ состояния производства и потребления мяса свинины в России [Текст] / Кропоткин О.Н. // Повышение эффективности использования сельскохозяйственной техники: сборник научных трудов ГНУ ВНИИТиН Россельхозакадемии. Выпуск №17. / ГНУ ВНИИТиН Россельхозакадемии. – Тамбов: Издательство Першина Р.В., 2010 г. – с. 67-70.
14. Кропоткин О.Н. Анализ способов и средств кормления свиней [Текст] / Кропоткин О.Н. //там же, с 70-79.
15. Кропоткин О.Н. Методика исследований самокормушки с шарнирной подвеской [Текст] / Тишанинов Н.П., Амельянц А.Г., Анашкин А.В., Кропоткин О.Н. // там же, с. 79-86.
16. Кропоткин О.Н. Результаты исследований рабочего процесса самокормушки с шарнирной подвеской [Текст] / Тишанинов Н.П., Амельянц А.Г., Анашкин А.В., Кропоткин О.Н. // там же, с. 86-97.
17. Кропоткин О.Н. Исследования технологической надежности контроля уровня корма в самокормушке [Текст] / Тишанинов Н.П., Амельянц А.Г., Анашкин А.В., Кропоткин О.Н. // там же, с. 97-104.
Патенты
18. Решение о выдаче патента на изобретение: «Устройство для контроля уровня сыпучих материалов» / Кропоткин О.Н., Тишанинов Н.П., Амельянц А.Г., Ведищев С.М. // Письмо от 22 марта 2010 г № 2009129704/28(041373)
19. Решение о выдаче патента на изобретение: «Вибрационный конвейер» / Кропоткин О.Н., Тишанинов Н.П., Амельянц А.Г., Ведищев С.М. // Письмо от 17 мая 2010 г № 2009108904/11(011918)
20. Решение о выдаче патента на изобретение: «Устройство для разделения потока сыпучих материалов» / Кропоткин О.Н., Тишанинов Н.П., Ведищев С.М., Тишанинов К.Н. // Письмо от 28 сентября 2010 г № 2009118684/21(025697)