
Лабораторная работа №4
| Вид материала | Лабораторная работа |
СодержаниеВведение в работу Порядок проведения работы |
- Методические указания к лабораторным работам Лабораторная работа, 357.24kb.
- Лабораторная работа №3 кпк лабораторная работа №3 Тема: карманный персональный компьютер, 173.34kb.
- Методические возможности стенда Особенности работы на стендах уилс-1 Ознакомительное, 1487.3kb.
- Лабораторная работа по курсу «Физические основы микроэлектроники», 136.21kb.
- Лабораторная работа, 166.92kb.
- Самостоятельная работа по учебным пособиям, 471.48kb.
- Конспект урока в 9 классе по теме: «Магний», 84.54kb.
- Лабораторная работа №1 Введение в Windows. Работа с окнами и приложениями в Windows, 67.41kb.
- Знакомство c Excel, 1212.51kb.
- Лабораторная работа, 105.21kb.
Санкт-Петербургский государственный морской технический университет
КАФЕДРА СУДОВОЙ АВТОМАТИКИ И ИЗМЕРЕНИЙ
Лаборатория моделирования динамических систем
ДИСЦИПЛИНА : "Теория автоматического управления"
Лабораторная работа № 4
Моделирование и исследование системы автоматического регулирования
( машина - двигатель, управляемая регулятором Ф. Дженкина ).
Условие устойчивости Д. К. Максвелла.
ЦЕЛЬ РАБОТЫ : получить практические навыки в исследовании устойчивости состояний
равновесия простейших астатических систем автоматического
регулирования.
ВВЕДЕНИЕ В РАБОТУ
Систему автоматического регулирования условно можно представить в виде объекта регулирования ( машина-двигатель ) и регулятора, замкнутых в единый контур с внешним возмущением ( изменением нагрузки ), воздействующим на этот контур извне.

Математической моделью машины-двигателя, управляемой астатическим регулятором является система дифференциальных уравнений следующего вида :
 | (1) |
где f(t) внешнее возмущающее воздействие ;
t) регулируемая величина ( входной сигнал регулятора ) ;
(t) регулирующее воздействие ( выходной сигнал регулятора ).
ПРИМЕЧАНИЕ : (t) для системы уже не является внешним воздействием ( как это было
при рассмотрении машины-двигателя ), а является присущей системе
переменной вместе со своими производными
 , определяющей
, определяющей состояние системы.
Представленную систему дифференциальных уравнений можно записать в виде одного уравнения :
а) относительно переменной t)
 (2)
(2)б) относительно переменной (t)
 (3)
(3)Внешний вид левой части уравнений (2) и (3) при смене переменных t),(t) не изменяется, характеристическое уравнение системы определяется выражением :

где
 корни этого характеристического уравнения.
корни этого характеристического уравнения.Состояние равновесия системы определяются как

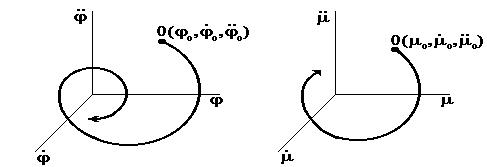
Свободное движение системы ( движение, возникающее при f = 0 и ненулевых значениях начальных условий ) может быть представлено в пространстве состояния системы ( фазовом пространстве )

Состояние равновесия считается устойчивым, если свободное движение системы с течением времени приближается к нему и наоборот неустойчивым, если удаляется от него.
Состояние равновесия данной системы будет устойчивым, если удовлетворяется условие :
 ( Условие Максвелла ).
( Условие Максвелла ).Структурная математическая модель системы имеет следующий вид :

Обратите внимание на минус в главном контуре ( контуре регулирования ) отмеченный значком .
Запомните основное правило регулирования сигнал, обходя контур регулирования, должен поменять знак.

ПОРЯДОК ПРОВЕДЕНИЯ РАБОТЫ :
1. Используя ранее заданные параметры объектов получите графики переходных процессов

 (t)
(t) (t) на одном поле.
 (t)
(t) 2. Постройте фазовые портреты () и
 ()
()3. Определите основное свойство системы – устойчива, неустойчива.
4. Используя условие Максвелла изменяя параметры регулятора переведите систему в другое качественное состояние.
5. Получите графики:
(t), (t), (t),  (), ().
(), ().6. Сделайте необходимые выводы.