
Содержание общие вопросы метрологического обеспечения измерительных систем 9 Брюханов В. А. 9
| Вид материала | Доклад |
СодержаниеСпособ снижения температурной погрешностиоптических датчиков S суммарного сигнала U Пивкин А.Г. |
- Вопросы по дисциплине «Метрология, стандартизация и сертификация» для подготовки, 69.28kb.
- Организационной основой метрологического обеспечения ОАО «Теплоприбор» является Центр, 31.48kb.
- Совершенствование метрологического обеспечения инклинометрии нефтегазовых скважин 25., 254.4kb.
- Решение IX семинара по вопросам метрологического обеспечения топографо-геодезического, 201.85kb.
- Эталонный комплекс для метрологического обеспечения акустических измерений в твердом, 58.45kb.
- Экзаменационные вопросы по дисциплине «Измерительная техника», 40.7kb.
- Методика приемки из наладки в эксплуатацию измерительных каналов информационно-измерительных, 235.63kb.
- Отдел метрологического обеспечения измерений физико-химических величин, 18.17kb.
- Рабочая программа дисциплины мерительные устройства систем управления, 448.87kb.
- Анализ и синтез измерительных преобразователей с частотным выходным сигналом для информационно-измерительных, 675kb.
Способ снижения температурной погрешности
оптических датчиков
Для измерений различных механических величин в жестких условиях ракетно-космической техники широко используют оптические методы. Существенным недостатком многих оптических датчиков (ОД) является зависимость мощности источников излучения (ИИ), интегральной чувствительности и внутреннего сопротивления приемников излучения (ПИ) от температуры [1]. Так, например, у серийно выпускаемых светодиодов типа 3Л107Б излучающая способность может меняться в интервале температур 50 С на 20–30 %, а у фотодиодов ФД-19КК, ФД 20-32К, КФДМ разброс по чувствительности может достигать 10–15 %. Подобный разброс энергетических характеристик приводит к значительным температурным погрешностям (от 10 до 50 %), если не принять специальных мер для их снижения.
Использование амплитудно-фазового способа преобразования сигналов дает возможность снизить температурную погрешность оптических датчиков, если в основу их принципа действия положен компенсационный метод [2, 3]. На рис. 1 приведена наиболее общая структурная схема такого датчика, а на рис. 2 векторная диаграмма сигналов, поясняющая амплитудно-фазовое преобразования сигналов. Отличительной особенностью предложенной схемы ОД является наличие дополнительного компенсационного канала. Рефлексометрический измерительный преобразователь (РИП) датчика с компенсационным каналом представляет собой приемо-передающую оптическую систему, состоящую из ИИ и ПИ: рабочего (РПИ) и компенсационного (КПИ).
Световой поток ИИ модулируется синусоидальным напряжением U
 низкой частоты генератора (Г
низкой частоты генератора (Г ). Световой поток, отраженный от диффузной поверхности, изменяющей свое положение в соответствии с изменением измеряемой физической величины Х, поступает на РПИ, где преобразуется в электрический сигнал Uр(Х). Часть светового потока ИИ поступает непосредственно на КПИ, где преобразуется в постоянный электрический сигнал UК.
). Световой поток, отраженный от диффузной поверхности, изменяющей свое положение в соответствии с изменением измеряемой физической величины Х, поступает на РПИ, где преобразуется в электрический сигнал Uр(Х). Часть светового потока ИИ поступает непосредственно на КПИ, где преобразуется в постоянный электрический сигнал UК.Сигналы Uр(Х) и UК подвергаются определенному масштабированию до уровней U1(Х) и U2 на масштабных преобразователях МП1 и МП2 соответственно, и сдвигаются с помощью фазосдвигающей цепи Фц на угол φ12 относительно друг друга.
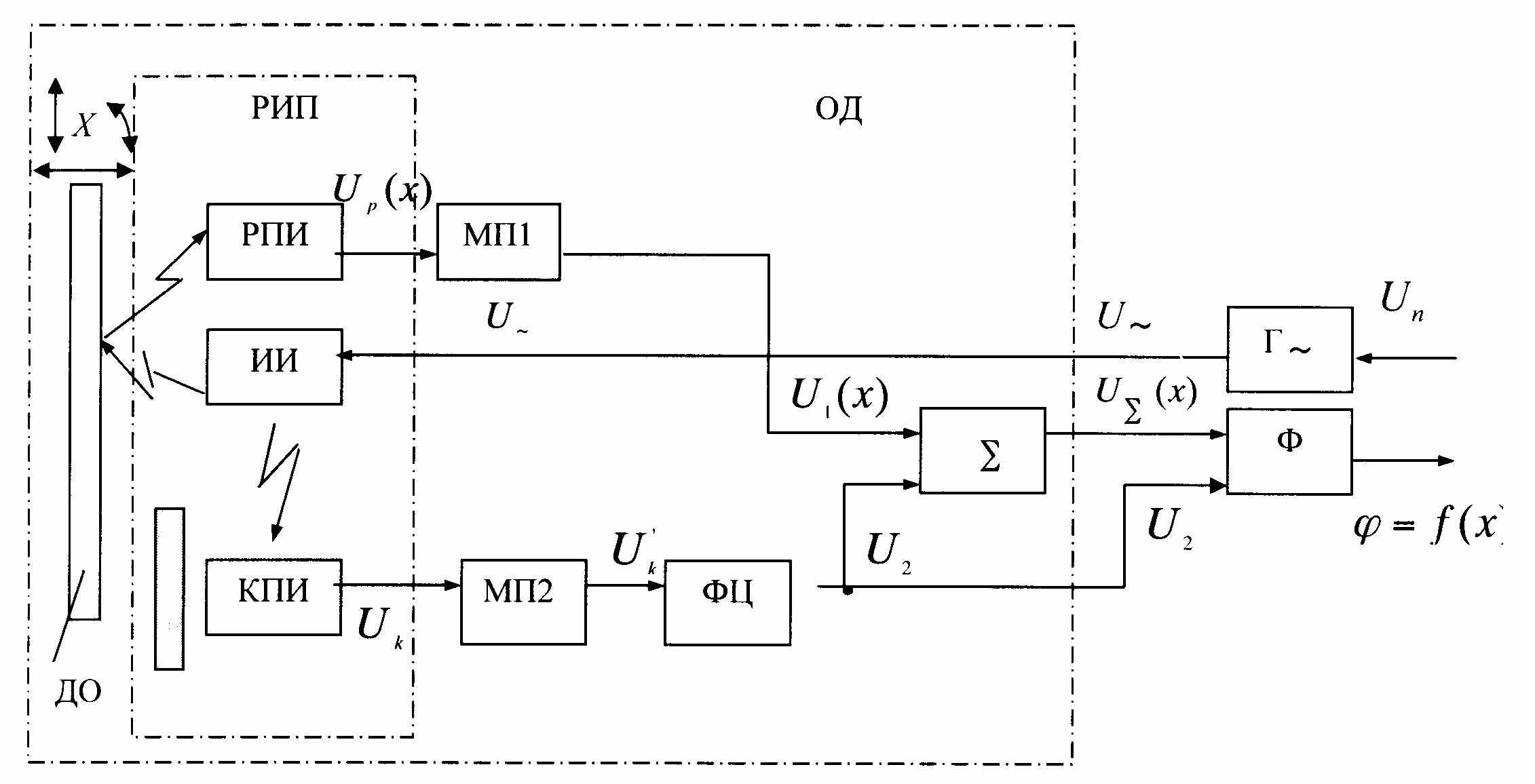
Рис. 1. Обобщенная структурная схема ОД
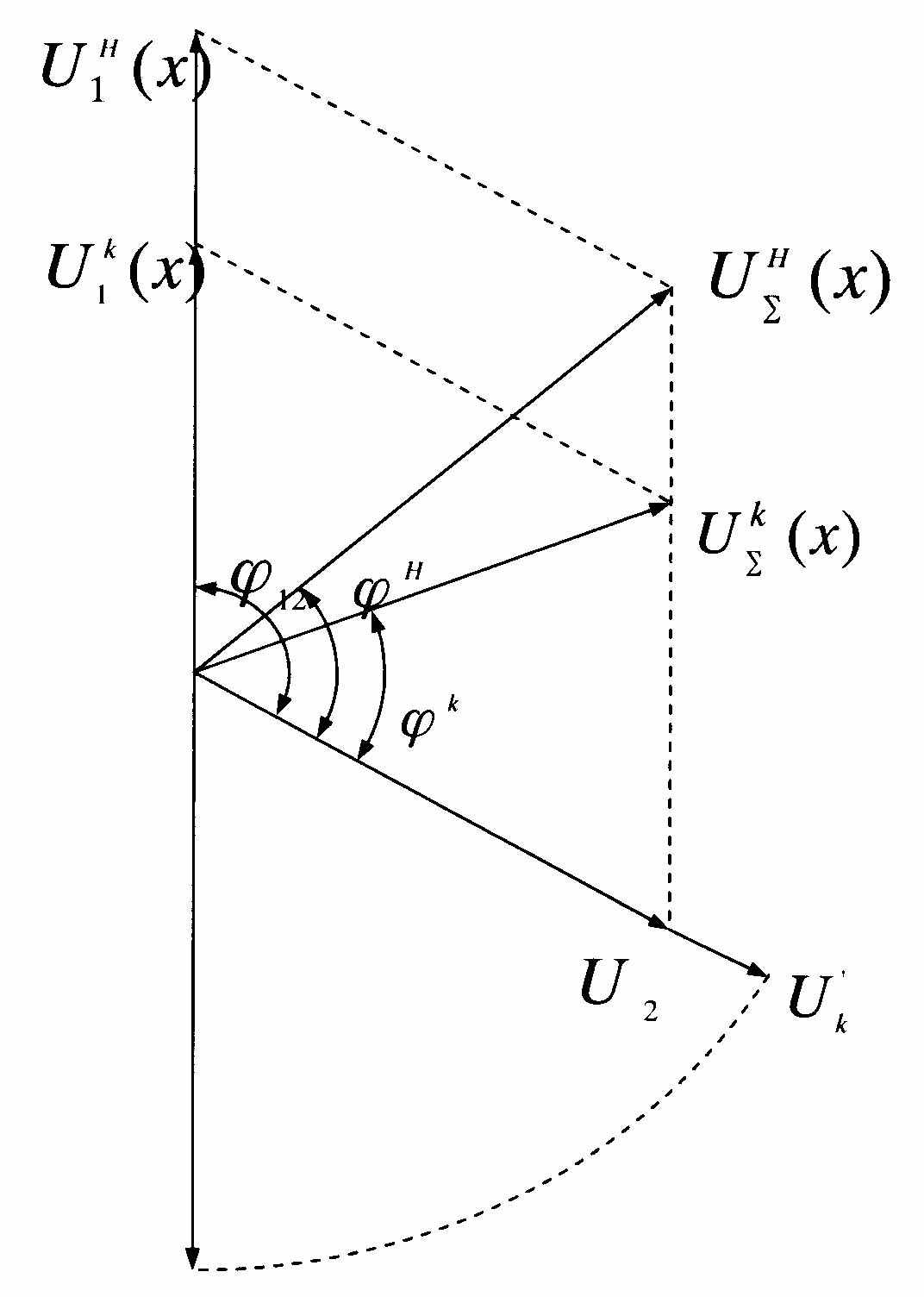
Рис. 2. Векторная диаграмма сигналов ОД
при амплитудно-фазовом преобразовании сигналов
Зависимость выходного сигнала ОД – фазы φ суммарного сигнала U(Х) от контролируемого параметра Х: φ=f(Х) имеет вид:
 , (1)
, (1)где КРПИ(Х), ККПИ – коэффициенты использования светового потока РПИ и КПИ соответственно; KМП1, KМП2 – коэффициенты масштабирования МП1 и МП2 соответственно; KФц – коэффициент передачи Фц; SВ1, SВ2 – вольтовые чувствительности РПИ и КПИ соответственно.
Под влиянием изменения температуры окружающей среды изменяются электрические параметры и параметры конструкции датчика, что приводит к возникновению дополнительной температурной погрешности преобразования:
 ,
,где , t – угол сдвига фазы выходного суммарного сигнала при температуре t0, принятой за номинальную, температуре t=t0+t соответственно; t – диапазон изменений температуры окружающей среды; t – изменение угла сдвига фазы выходного сигнала при изменении температуры в диапазоне t; max, min – угол сдвига фазы выходного сигнала, соответствующий максимальному и минимальному значениям измеряемого параметра.
Основными элементами, изменение которых ведет к возникновению температурной погрешности, являются ИИ, ПИ и измерительная схема (ИС). Тогда с достаточной для инженерных расчетов точностью можно записать:
 , (2)
, (2)где
 ,
,  ,
,  – абсолютные температурные погрешности, обусловленные изменениями параметров ИИ, ПИ и ИС соответственно.
– абсолютные температурные погрешности, обусловленные изменениями параметров ИИ, ПИ и ИС соответственно.При изменении температуры окружающей среды изменяются мощность излучения ИИ и интегральная чувствительность ПИ, то есть
 ,
,  .
.При этом выражение (2) примет вид:
 , (3)
, (3)где
 ,
,  – погрешности измерений, обусловленные изменением мощности излучения ИИ и интегральной чувствительности ПИ соответственно.
– погрешности измерений, обусловленные изменением мощности излучения ИИ и интегральной чувствительности ПИ соответственно.Для того, чтобы дать оценку составляющим формулы (3), необходимо обратиться к выражению (1), вывод которого приведен в статье [4]. Анализ выражения (1) показывает, что изменение мощности ИИ, обусловленное изменением температуры окружающей среды, практически не влияет на выходной сигнал ОД, если фототоки, протекающие через сопротивления нагрузки РПИ и КПИ, линейно зависят от светового потока. Это объясняется тем, что изменение мощности излучения ИИ ведет к изменению начального светового потока
 на некоторое значение, то есть
на некоторое значение, то есть  ,где
,где  – световой поток ИИ с учетом дополнительного светового потока, обусловленного изменением мощности излучения ИИ;
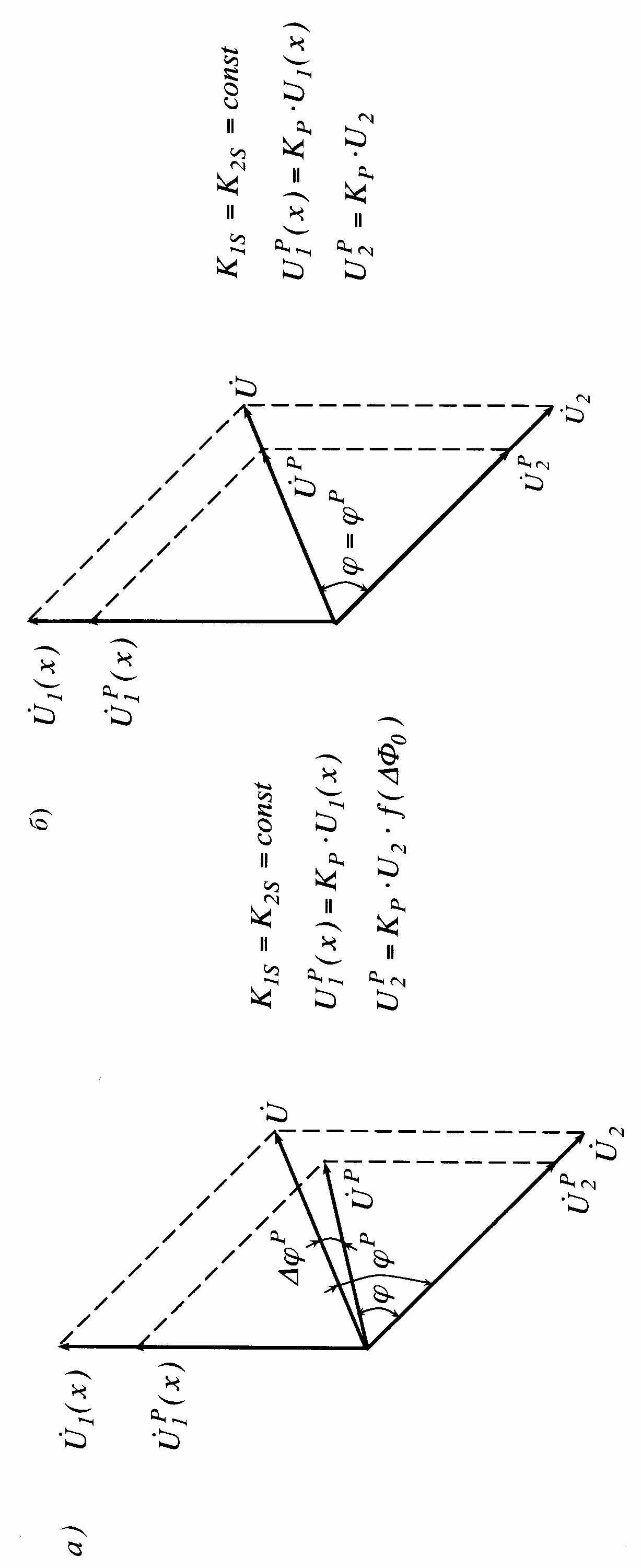
– световой поток ИИ с учетом дополнительного светового потока, обусловленного изменением мощности излучения ИИ;  – дополнительный световой поток ИИ, обусловленный изменением мощности излучения ИИ. Сигналы U1(X) и U2 примут соответственно значения U1Р(X) и U2Р, определяемые выражениями (4) и (5) (рис. 3, а):
– дополнительный световой поток ИИ, обусловленный изменением мощности излучения ИИ. Сигналы U1(X) и U2 примут соответственно значения U1Р(X) и U2Р, определяемые выражениями (4) и (5) (рис. 3, а): , (4)
, (4) . (5)
. (5)Тогда фаза суммарного сигнала UР относительно фазы сигнала U2Р при изменении мощности излучения ИИ определится как
 , (6)
, (6)или
 , (7)
, (7)где
 .
.Коэффициент KРПИ(Х) не вносит дополнительной температурной погрешности, так как основные параметры, определяющие данный коэффициент, относятся к конструктивным, которые практически остаются неизменными при изменении температуры окружающей среды в диапазоне 50 С [4].
Возможно появление погрешности при изменении коэффициентов КМП1, KМП2, KФц. Влияние изменения параметров измерительной схемы КМП1, KМП2, KФц на точность измерений достаточно полно освещено в литературе [5, 6], поэтому с учетом указанных источников с достаточной точностью можно принять при изменении температуры в диапазоне 50 С КМП1=KМП21 % для операционного усилителя [6], KФц0,5 % для RC-цепей [5]. Так как коэффициенты КМП1 и KМП2 в выражении (6) находятся в отношении, то с достаточной для инженерных расчетов точностью можно считать, что изменение значения коэффициента K не превысит 1%. Непропорциональные изменения SВ1, SВ2 при изменении температуры окружающей среды приведут к дополнительной температурной погрешности (рис. 3, а).
Данные рассуждения справедливы и для случая, когда используется несколько ИИ и КПИ, так как на РПИ поступает усредненный по мощности световой поток [3].
Пример 1. Определить температурную погрешность ОЭД, структурная схема которого приведена на рис. 1. Рассматривается наихудший вариант, когда мощность ИИ увеличивается на максимально возможное значение – на 30 % (для светодиодов типа 3Л107 Б), а параметр φ12 и значение сигнала U2 найдены для экспериментальной зависимости, приведенной на рис. 4, методом постепенного приближения. Определено, что максимальная температурная погрешность, определенная по максимальному отклонению, для ОЭД c компенсационным каналом равна 0,43 %, что в 28 раз меньше, чем в ОЭД без компенсационного канала.
Так как возможно появление погрешности при изменении коэффициентов КМП1, KМП2, KФц, то целесообразно элементы МП2 и Фц отнести из зоны воздействия дестабилизирующих факторов в более благоприятные условия. МП1 должен быть расположен в корпусе датчика, так как он выполняет роль усилителя сигнала малого уровня UP(X), передача которого без предварительного усиления по электрическому кабелю не представляется возможным.
Так как непропорциональные изменения SВ1, SВ2 при изменении температуры окружающей среды ведут к дополнительной температурной погрешности, то целесообразно использовать ПИ одного типа, у которых знак ухода чувствительности одинаков, что ведет к частичной температурной компенсации. На рис. 3 приведена векторная диаграмма, поясняющая способ компенсации температурной погрешности при амплитудно-фазовом преобразовании сигналов, когда SВ1=SВ2.
Анализ выражения (7) показывает, что точность измерений параметра φ зависит от соотношения интегральных фоточувствительностей SВ1 и SВ2 РПИ и КПИ. На практике разброс интегральной фоточувствительности от образца к образцу достигает 10–15 %, из-за чего для практических схем подобрать фотоприемники с одинаковой чувствительностью невозможно, а также нецелесообразно. Поэтому изменение чувствительности РПИ и КПИ при изменении температуры приведет к дополнительной погрешности измерения.
Предлагается способ температурной компенсации при непропорциональных изменениях SВ1, SВ2, когда SВ1SВ2.
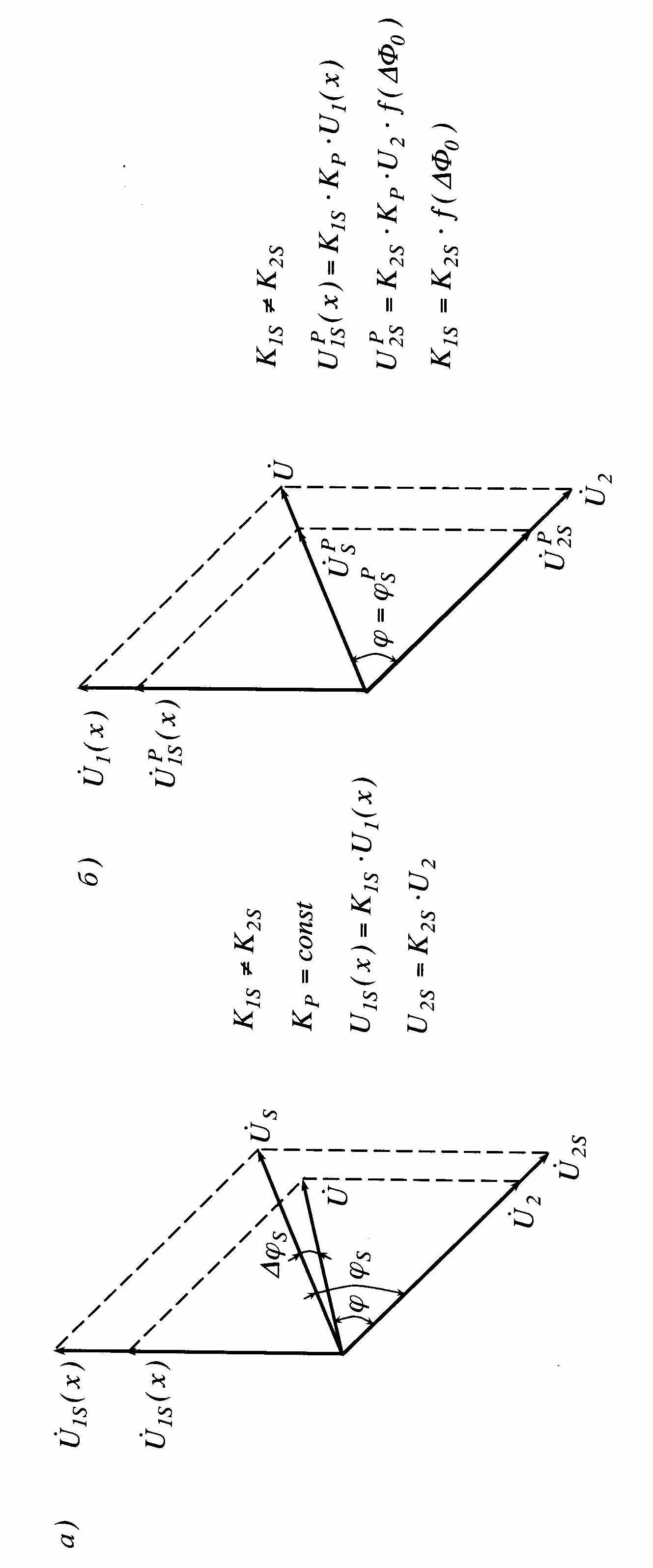
Вначале рассмотрим случай, когда при изменении температуры окружающей среды мощность ИИ не изменяется, а интегральные фоточувствительности РПИ и КПИ изменяются неравнопропорционально, то есть S1S= К1SSВ1, S2S= К2SSВ2, где К1S, К2S – коэффициенты пропорциональности ухода чувствительности РПИ и КПИ соответственно. Тогда сигналы U1(X) и U2 примут соответственно значения U1S(X) и U2S, определяемые выражениями (8) и (9) (рис. 3, а):
 , (8)
, (8) , (9)
, (9)В этом случае фаза φ S суммарного сигнала US относительно фазы сигнала U2S при изменении чувствительности фотоприемников определится как
 , (10)
, (10)Т
 ак как К1S ¹ К2S , то φ ¹ φS.
ак как К1S ¹ К2S , то φ ¹ φS.Таким образом, неравнопропорциональные изменения интегральных фоточувствительностей РПИ и КПИ при неизменной мощности излучения ИИ приведут к температурной погрешности φS =φ–φS, определяемой выражением (11):
 .
.П
(11)
ример 2. Определить температурную погрешность ОЭД, структурная схема которого соответствует, приведенной на рис. 1. Рассматривается вариант, когда мощность ИИ не меняется, а интегральная чувствительность одного из ПИ (например, РПИ) увеличивается на максимально возможное значение (на 15 %), а другого – КПИ – остается неизменной. Остальные параметры соответствуют параметрам, приведенным в примере 1. Определено, что приведенная температурная погрешность для рассмотренного случая равна 6,9 %.

На практике при изменении температуры изменяется чувствительность как РПИ, так и КПИ, причем, как правило, для конкретного датчика используют фотоприемники одного типа. Поэтому чувствительность у них уходит в одну сторону, то есть происходит некоторая температурная компенсация, и φS несколько меньше, чем в случае, рассмотренном в примере 2.
В вышеприведенных рассуждениях было сделано предположение, что освещенность РПИ и КПИ незначительна, поэтому фототок, протекающий через сопротивление нагрузки, линейно зависит от светового потока. В действительности же данное предположение справедливо для РПИ, на которые поступает отраженный световой поток, поэтому их освещенность незначительна. Освещенность же КПИ значительно больше, так как его располагают в непосредственной близости от ИИ (с целью исключения дополнительного усиления). Поэтому между фототоком и световым потоком существует некоторая нелинейная зависимость, то есть при изменении светового потока ИИ на значение ±Ф справедливо
 , (12)
, (12)где
 – некоторая нелинейная функция, зависящая от светового потока ИИ.
– некоторая нелинейная функция, зависящая от светового потока ИИ.Тогда
 , (13)
, (13)то есть при изменении мощности излучения ИИ при К1S ¹ К2S появится погрешность φР=φ–φР, определяемая выражением (14) (рис. 4):

(14)
To обстоятельство, что при изменении температуры окружающей среды появятся погрешности φР и φS, положено в основу следующего способа температурной компенсации.
С целью уменьшения температурной погрешности необходимо, чтобы φР = –φS, то есть изменения фазы φ суммарного сигнала U(Х), вызванные изменением мощности излучения источника излучения и изменением фоточувствительности приемников излучения, были взаимно скомпенсированы (рис. 4, б).

С учетом выражений (10) и (13) можно записать
 .
.О
(15)
ткуда для полной температурной компенсации должно выполняться равенство
 .
.Указанное равенство возможно в том случае, если при изменении температуры окружающей среды мощность излучения ИИ и отношение изменения фоточувствительностей ПИ будут изменяться в противоположные стороны, например, при увеличении температуры окружающей среды мощность ИИ увеличится, а отношение фоточувствительностей ПИ уменьшится. Подобного равенства можно добиться путем изменения соотношения количества РПИ и КПИ, а также путем изменения положения КПИ относительно ИИ (например, приближая их к ИИ или, наоборот, удаляя).
Таким образом, учитывая вышеприведенные рассуждения, с точки зрения повышения точности измерения предпочтительно в качестве опорного сигнала брать компенсационный сигнал U2.
Если датчик построен по схеме, приведенной в работе [3], то для полной температурной компенсации необходимо, что выполнялось условие (16):
В
(16)
се вышеприведенные рассуждения для данного случая справедливы.
Таким образом, снижения температурной погрешности ОД можно добиться следующим образом:
– применением амплитудно-фазового преобразования сигналов,
– введением в ОД дополнительного компенсационного канала,
– при использовании РПИ и КПИ одного типа,
– путем изменения количественного соотношения ИИ и ПИ,
– изменением положения КПИ относительно ИИ.
Новый способ температурной компенсации позволит снизить температурную погрешность до 1–2 %.
Литература
1 Иванов В.И., Аксенов А.И., Юшин А.М. Полупроводниковые оптоэлектронные приборы: Справочник. – М.: Энергоатомиздат, 1988.
2 Патент РФ № 1260664, МПК6 G 01 В 7/00. Способ преобразования перемещение-фаза /Опубл. 30.09.86, Бюл. № 36.
3 Бадеев А.В., Мурашкина Т.И. Оптоэлектронный датчик перемещений // Датчики и системы, 2003, №5. – С.30–32.
4 Бадеев А.В. Математическая модель функции преобразования оптоэлектронного датчика перемещений // Датчики систем измерения, контроля, и управления: Межвуз. сб. науч. тр. – вып.23 (2003) – Пенза: Изд-во Пенз. гос. ун-та., 2003. – С. 126–132.
5 Колтик Е.Д Фазосдвигающие устройства. – М.: Изд-во стандартов. – 1981.
6 Шило В.Л. Линейные интегральные схемы в радиоэлектронной аппаратуре. – М.: Сов. радио, 1979.
Авторы
Бадеев Александр Валентинович – аспирант кафедры Приборостроение Пензенского государственного университета
Мурашкина Татьяна Ивановна – д.т.н., профессор кафедры Приборостроение Пензенского Государственного университета.
Серебряков Дмитрий Иванович – аспирант кафедры Приборостроение Пензенского государственного университета
Россия, 440026, Пенза, ул. Красная, 40.
Тел. (841-2) 56-06-96.
Пивкин Александр Григорьевич – генеральный директор ОАО “НИИ Вычислительной техники”, ООО “НИИВТ-РУСИЧИ-ФАРМА”, к.т.н.
Россия, 440026, Пенза, ул. Лермонтова, 3.
Тел. (841-2) 55-20-47, факс (841-2) 55-19-03