
Лекция №1 Основные тенденции развития автоматизированного электропривода
| Вид материала | Лекция |
- Программа научно-практического семинара «Проблемы и тенденции развития автоматизированного, 14.96kb.
- Задача поиск инвестиций для реализации проекта, 393.23kb.
- Текст лекций н. О. Воскресенская Оглавление Лекция 1: Введение в дисциплину. Предмет, 1185.25kb.
- Договор №, 29.83kb.
- Реферат по основам экономической теории на тему: «Основные тенденции развития мировой, 93.36kb.
- Терминология + все о двигателе постоянного тока независимого возбуждения, 181.73kb.
- Мировая экономика. Возникновение, сущность и основные тенденции ее развития Мировая, 69.85kb.
- Общие вопросы экономики сга рыночная экономика, принципы ее функционирования и основные, 32.65kb.
- А. М. Горького Л. Н. Мазур информационное обеспечение управления основные тенденции, 2938.14kb.
- Москва 2011 общие вопросы экономики рыночная экономика, принципы ее функционирования, 144.21kb.
Лекция №1
Основные тенденции развития автоматизированного электропривода
Анализ продукции ведущих мировых производителей систем привода и материалов опубликованных научных исследований в этой области позволяет отметить следующие ярко выраженные тенденции развития электропривода:
1. Неуклонно снижается доля систем привода с двигателями постоянного тока и увеличивается доля систем привода с двигателями переменного тока. Это связано с низкой надежностью механического коллектора и более высокой стоимостью коллекторных двигателей постоянного тока по сравнению с двигателями переменного тока. Доля приводов постоянного тока сократилась до 10…15% от общего числа приводов.
2. Преимущественное применение в настоящее время имеют привода с короткозамкнутыми асинхронными двигателями. Большинство таких приводов (около 80%) — нерегулируемые. Однако, в связи с резким удешевлением статических преобразователей частоты, доля частотно - регулируемых асинхронных электроприводов быстро увеличивается.
Естественной альтернативой коллекторным приводам постоянного тока являются привода с вентильными, т.е. электронно - коммутируемыми двигателями (например: с тиристорным управлением). В качестве исполнительных бесколлекторных двигателей постоянного тока (БДПТ) преимущественное применение получили синхронные двигатели с возбуждением от постоянных магнитов или с электромагнитным возбуждением (для больших мощностей). Этот тип привода наиболее перспективен для станкостроения и робототехники, однако, является самым дорогостоящим. Некоторого снижения стоимости можно добиться при использовании синхронного реактивного двигателя в качестве исполнительного.
Приводом следующего века по прогнозам большинства специалистов станет привод на основе вентильно-индукторного двигателя (ВИД). Двигатели этого типа просты в изготовлении, технологичны и дешевы. Они имеют пассивный ферромагнитный ротор без каких - либо обмоток или магнитов. Вместе с тем, высокие потребительские свойства привода могут быть обеспечены только при применении мощной микропроцессорной системы управления в сочетании с современной силовой электроникой. Усилия многих разработчиков в мире сконцентрированы в этой области. Для типовых применений перспективны индукторные двигатели с самовозбуждением, а для тяговых приводов — индукторные двигатели с независимым возбуждением со стороны статора. В последнем случае появляется возможность двухзонного регулирования скорости по аналогии с обычными приводами постоянного тока.
Примечание:
1) Индуктор электрической машины – часть магнитной цепи электрической машины, содержащая обмотку возбуждения.
2) Вентильный электропривод – электропривод в котором для питания двигателя и регулирования его угловой скорости используется преобразователь на управляемых электрических вентилях (например: тиристорах) и содержит: либо управляемый преобразователь частоты (например: на IGPS транзисторах), питающий двигатель переменного тока, либо управляемый выпрямитель, питающий двигатель постоянного тока.
Для большинства массовых применений приводов (насосы, вентиляторы, конвейеры, компрессоры и т.д.) требуется относительно небольшой диапазон регулирования скорости (до 1:10…1:20) и относительно низкое быстродействие. При этом целесообразно использовать классические структуры скалярного управления. Переход к широкодиапазонным (до 1:10000), быстродействующим приводам станков, роботов и транспортных средств, требует применения более сложных структур векторного управления. Доля таких приводов составляет сейчас более 7% от общего числа и постоянно растет.
В последнее время на базе систем векторного управления разработан ряд приводов с прямым цифровым управлением моментом. Отличительной особенностью этих решений является предельно высокое быстродействие контуров тока, реализованных, как правило, на базе цифровых релейных регуляторов или регуляторов, работающих на принципах нечеткой логики (фаззи - логики). Системы прямого цифрового управления моментом ориентированы в первую очередь на транспорт, на использование в кранах, лифтах, робототехнике.
Усложнение структур управления приводами потребовало резкого увеличения производительности центрального процессора и перехода к специализированным процессорам с объектно-ориентированной системой команд, адаптированной к решению задач цифрового регулирования в реальном времени (разработчику приложений по управлению новой техникой желательно знать язык программирования DELPHI или ему подобный).
Рост вычислительных возможностей встроенных систем управления приводами сопровождается расширением их функций. Кроме прямого цифрового управления силовым преобразователем реализуются дополнительные функции поддержки интерфейса с пользователем (через пульт оперативного управления), а также управления технологическим процессом.
Стремление предельно удешевить привод, особенно для массовых применений в бытовой технике (пылесосы, стиральные машины, холодильники, кондиционеры и т. д.), привело к отказу от датчиков механических переменных и переходу к системам бездатчикового управления, где для оценки механических координат привода (положения, скорости, ускорения) используются специальные цифровые наблюдатели (например, энкодеры). Это возможно только при высокой производительности центрального процессора, когда система дифференциальных уравнений, описывающих поведение привода, может быть решена в реальном времени.
Возросшие возможности микропроцессорной техники привели к тому, что при массовом производстве изделий с объемом выпуска не менее 10000 штук в год, оказывается возможным и экономически целесообразным создание мощных, однокристальных систем управления приводами на базе DSP - микроконтроллеров. Их стоимость при ограниченных интерфейсных функциях не превышает 10…20$.
Основные затраты при разработке систем управления приводами приходятся не на создание аппаратной части контроллера, а на разработку алгоритмического и программного обеспечения.
Пути совершенствования электропривода

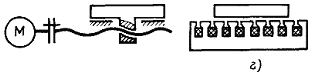
Рис. 1. Приближение источника движения к исполнительному органу станка: а — привод с коробкой подач; б — привод с одноступенчатым редуктором; в — прямое соединение двигателя с ходовым винтом; г — линейный электрический двигатель
^ I. Приближение источника движения к исполнительному органу (рис.1). Эта тенденция и в приводе подачи станка и в приводе главного движения приводит к упрощению конструкции механической части привода, увеличению ее жесткости, улучшению динамических качеств и повышению кинематической точности промежуточных передач.
В приводе подач механические передачи сведены к минимуму и часто вал двигателя непосредственно может быть соединен с ходовым винтом, который является единственным механическим устройством преобразования вращательного движения в поступательное. Применение линейных двигателей позволяет устранить и этот элемент и приложить электромеханические усилия к поступательно движущемуся узлу станка.
Аналогичные тенденции наблюдаются и в приводе главного движения. Однако полное исключение механических передач ограничивается малым диапазоном регулирования электропривода с постоянной мощностью.
^ Исключение механических передач (коробок скоростей и коробок подач станков) возможно только при широком диапазоне регулирования скорости.
Механические передачи задерживают и существенно сглаживают низкие частоты, возникающие в приводе, поэтому редуктор с небольшим передаточным отношением по этой причине может быть полезным. В приводе роботов редуктор сохраняется, поскольку исключение механических передач и применение тихоходных двигателей, как правило, увеличивает его размеры и массу. В электромеханических промышленных роботах (ПР) двигатель и редуктор встраивают в сочленение звеньев.
Важное значение имеет разработка электромагнитных механизмов для вспомогательных движений в станках. Функциональные, фиксирующие и другие движения могут быть осуществлены путем использования прямоходовых или поворотных электромагнитов с соответствующей системой управления.
^ II. Использование специальных более совершенных исполнительных двигателей. Доля специальных двигателей, предназначенных для станков и ПР, непрерывно увеличивается. Для станков необходимы двигатели, способные обеспечить необходимые статические и динамические характеристики на всем диапазоне регулирования скорости, который достигает десятков тысяч. Двигатели для станков не должны быть энергонасыщены во избежание передачи на станок тепловых и механических возмущений.
Важным условием является оснащение двигателей вспомогательными информационными и управляющими устройствами, такими, как тахогенератор, датчик угла (резольвер), тормоз и тепловая защита.
^ III. Совершенствование полупроводниковой элементной базы. Совершенствование электропривода тесно связано с развитием полупроводниковой техники, являющейся базой для создания силовых преобразователей и схем управления. Происходит непрерывное улучшение технических характеристик тиристоров, которые являются основным силовым элементом электропривода, но обладают ограниченным управлением. Создаются более перспективные, полностью управляемые транзисторные силовые преобразователи. Непрерывное повышение степени интеграции полупроводниковых устройств выражается в создании силовых полупроводниковых модулей, что позволяет повысить надежность преобразователя, уменьшить его размеры и упростить монтаж. Важным направлением развития элементной базы является создание специализированных интегральных схем для системы управления приводом – так называемых драйверов. Такие схемы включают в себя устройства управления силовыми тиристорами, регуляторы привода, блоки токоограничения и др.
^ IV. Расширение функциональных свойств электропривода. Функции, которые выполняет электропривод, непрерывно расширяются. Если раньше электропривод считался источником равномерного движения, а все сложные взаимосвязанные перемещения формообразования выполнялись механизмом станка, то в настоящее время положение резко изменилось.
В современных станках редко применяют мальтийские кресты, неполные зубчатые колеса и другие сложные механизмы для движений с остановками и точным позиционированием, так как их функции выполняет электропривод. При этом гибкая система управления обеспечивает оптимальные значения ускорений в электромеханической системе станка при необходимой точности позиционирования.
Электропривод все в большей степени контролирует и ограничивает нагрузки в элементах конструкции станка, что позволяет предотвратить его аварию, контролировать поломку инструмента, уровень силового воздействия в зажимных устройствах и др.
Повышение быстродействия и точности электропривода приводит к тому, что все большее число сложных взаимосвязанных движений деталей и инструмента осуществляется только с помощью электропривода. Наиболее распространенной является функциональная связь нескольких приводов подачи. Такие связи следящих приводов широко используют в станках с ЧПУ. Более сложные функциональные зависимости осуществляют для связи привода главного движения и подачи. В этом случае привод подачи должен обладать превосходными динамическими характеристиками.
Задача обеспечения взаимосвязанных движений с помощью электропривода решена не полностью. Здесь необходимо учесть высокую точность обработки деталей, которая характеризуется относительной погрешностью 10-4...10-6, что накладывает соответствующие требования на точность воспроизведения электроприводом управляющих движений. Кроме того, для получения качественного изделия необходимо обеспечить инвариантность привода к многочисленным возмущениям, сопутствующим технологическому процессу. Механические кинематические цепи обладают несомненным преимуществом — высокой динамической жесткостью, и системы электропривода уступают им в этом отношении. Дальнейшее развитие принципа инвариантности, создание приводов с комбинированным управлением несомненно позволят ликвидировать этот недостаток.
^ V. Увеличение объема информации, поступающей в систему электропривода. Совершенствование систем автоматизированного электропривода связано с непрерывным увеличением объема перерабатываемой информации. Информационные устройства (датчики) в системе электропривода можно разбить на несколько групп. Наибольшее значение имеют датчики параметров движения: скорости и перемещений или угла поворота вала. В системах адаптивного управления необходимо обрабатывать информацию о скорости резания, подаче, перемещениях и деформациях элементов станка, силах резания. Используется также информация, характеризующая режим работы системы электропривода: напряжение сети, ток двигателя и нагрев обмоток. Специфика метрологического обеспечения электропривода связана с огромным диапазоном регулирования скорости. Датчики параметров движения (пути и скорости) имеют лучшие метрологические характеристики в верхней части этого диапазона, на которой осуществляются малоточные вспомогательные перемещения. Рабочие подачи относят к нижней части диапазона регулирования скорости, но здесь точностные параметры датчиков значительно хуже.
Таким образом, дальнейшее совершенствование электропривода тесно связано с проблемой создания датчиков обратной связи, имеющих одинаковые метрологические характеристики на всем диапазоне регулирования скорости.
^ VI. Развитие систем цифрового и микропроцессорного управления электроприводом. Развитие систем ЧПУ, проникновение микропроцессорной техники в область управления станками оказывают большое влияние на структуру и технические средства электропривода. Возникает несоответствие между цифровой системой управления станком и аналоговой формой управления в системе электропривода, которое усугубляется наличием импульсного элемента, каковым является тиристорный силовой преобразователь. В результате информация многократно преобразуется из аналоговой формы в цифровую и обратно, что приводит к неизбежным искажениям сигналов и потери точности в системе управления.
Поэтому вполне естественно появление цифрового электропривода, полностью информационно согласованного с системой управления станком. Такой привод может быть осуществлен только на микропроцессорной основе. Электропривод с микропроцессорным управлением характеризуется повышенной точностью, отсутствием дрейфа нуля усилителей, гибкостью системы управления, универсальностью и простотой сопряжения с управляющей ЭВМ, высокой надежностью и возможностью диагностики.
Применение микропроцессоров позволяет создать новые системы управления электроприводом станков. Это сложные системы управления электроприводом, аппаратная реализация которых затруднена из-за большого числа элементов и громоздкости алгоритма управления.
Огромные возможности открываются перед микропроцессорами при создании самонастраивающихся и оптимальных систем управления станочным электрооборудованием, в электроприводе с моделью, электроприводе с переменной структурой и т.п. современных системах управления.
^ VII. Комплектные системы электропривода. Современный электропривод станков и ПР выполняется в виде комплекта электрооборудования. Тенденция комплектной поставки (продажи) электрооборудования развивается в двух направлениях.
Во-первых, увеличивается число электроприводов (осей), включаемых в комплект. Вполне естественно, что в комплект входят привод главного движения и все приводы подачи, обеспечивающие многокоординатное перемещение. Подобный подход имеет большие организационные и эксплуатационные преимущества.
Во-вторых, увеличивается объем комплекта. Идеи комплектной поставки, с одной стороны, распространяются на все большую часть электромеханической системы привода. Появляются электромеханизмы, которые включают в себя электродвигатель, редуктор, соединительную муфту и ходовой винт, т.е. по существу все электромеханическое устройство, преобразующее электрическую энергию в энергию механического поступательного перемещения. С другой стороны, происходит интеграция системы управления электроприводом с системой управления технологическим процессом обработки и в комплект электрооборудования включаются многие узлы, предназначенные для этой цели. Это развитие мехатроники.
Развитие программируемых средств управления позволяет надеяться, что со временем оба эти направления сольются в единый комплект, включающий все энергетические и информационные элементы электрооборудования.
^ ОСНОВНЫЕ ОПРЕДЕЛЕНИЯ И КЛАССИФИКАЦИЯ
Автоматизированный электропривод (АЭ) станков и ПР представляет собой электромеханическую систему, состоящую из электрического (силового) преобразователя (П) (рис. 2), электродвигателя (М), механической системы (МС) «системы управления (СУ).
В электроприводе электрическая энергия преобразуется в механическую, а также происходит преобразование информации, которая с помощью датчиков обратной связи от силового преобразователя, двигателя и механической системы поступает в систему управления, вырабатывающую управляющее воздействие. Преобразование информации в электроприводе имеет не меньшее значение, чем преобразование энергии.
В простейшем разомкнутом электроприводе силовой преобразователь может отсутствовать. В этом случае электродвигатель получает энергию непосредственно от сети. Как правило, упрощение или исключение электрических элементов привода приводит к усложнению механических элементов. И, наоборот, развитая система управления, быстродействующий силовой преобразователь позволяют упростить и удешевить систему механических передач.
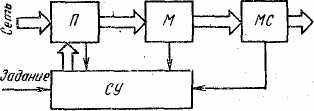
Рис. 2. Схема электромеханической системы привода
Электропривод состоит из нескольких разнородных элементов, которые должны быть энергетически, динамически и информационно согласованы между собой. Чтобы создать совершенный металлорежущий станок или ПР, невозможно расчленять привод на отдельные элементы. Нельзя выделять механическую передачу и говорить только о механическом приводе, а также рассматривать отдельно силовой преобразователь и систему управления.
При работе электропривода все элементы взаимосвязаны. Внутренние обратные связи связывают электродвигатель с силовым преобразователем, а механические передачи с электродвигателем. Внешние обратные связи объединяют эти элементы между собой. Все это позволяет говорить об электромеханической системе привода, которую нужно изучать и анализировать только целиком, не расчленяя на части.
Обычно все электрические элементы привода объединяют в один узел, который называют комплектным электроприводом или просто электроприводом. Электромеханическая система электропривода состоит из двух взаимосвязанных частей: электропривода и механической системы (передачи).
^ КЛАССИФИКАЦИЯ ЭЛЕКТРОПРИВОДОВ
| Классификационный признак | Классификационные градации |
| По числу рабочих органов, приводимых электроприводом | 1. Индивидуальный 2. Многодвигательный 3. Групповой |
| По виду движения электродвигателя | 1. Вращательного движения 2. Поступательного движения (линейный) 3. Многокоординатного движения (на основе специальных шаговых двигателей) |
| По способу соединения двигателя с рабочим органом | 1. Редукторный 2. Безредукторный 3. Конструктивно-интегрированный (например: электрошпиндели, мотор-колеса и др.) |
| По регулируемости | 1. Нерегулируемый 2. Регулируемый |
| По основному контролируемому параметру | 1. Регулируемый по моменту 2. Регулируемый по скорости 3. Регулируемый по положению |
| По виду управления | 1. С ручным управлением 2. С полуавтоматическим управлением 3. С замкнутой САР скорости с ручным заданием или заданием от системы управления технологическим процессом 4. С замкнутой САР положения, обеспечивающей точное позиционирование 5. С программным управлением 6. Следящий 7. Адаптивный |
По способу передачи механической энергии исполнительному органу электроприводы делятся:
1. Индивидуальный электропривод характеризуется тем, что каждый исполнительный орган рабочей машины приводится в движение своим отдельным двигателем, что расширяет функциональные возможности станка, делает его управление более гибким. При этом упрощается кинематическая схема и повышается коэффициент полезного действия. Этот вид привода в настоящее время является основным, так как при индивидуальном электроприводе упрощается кинематическая передача от двигателя к исполнительному органу, легко осуществляется автоматизация технологического процесса, улучшаются условия обслуживания рабочей машины.
2. Взаимосвязанный (многодвигательный) электропривод содержит два или несколько электрически или механически связанных между собой электроприводов. Частным случаем взаимосвязанного электропривода является многодвигательный электропривод, при котором несколько двигателей работают на общий вал, приводя в движение один исполнительный орган, или движения стола станка с ЧПУ в двух ортогональных направлениях при контурной обработке, системы «электрического вала», используемые при нарезании резьбы, и т.п.
3. Групповой электропривод характеризуется тем, что от одного двигателя приводится в движение несколько исполнительных органов одной или нескольких рабочих машин. Такая система электропривода, широко применявшаяся на раннем этапе его развития, имеет разветвленную кинематическую цепь (трансмиссию), что усложняет ее эксплуатацию и автоматизацию технологических процессов.
По виду движения различаются электроприводы вращательного и поступательного однонаправленного и реверсивного движения, а также электроприводы возвратно-поступательного движения. Эти движения могут иметь как непрерывный, так и дискретный характер.
По принципам регулирования скорости и положения электропривод может быть:
нерегулируемый (исполнительный орган приводится в движение с одной постоянной скоростью);
регулируемый (путем воздействия на электропривод скорость движения исполнительного органа изменяется в соответствии с требованиями технологического процесса);
следящий (с помощью электропривода воспроизводится перемещение исполнительного органа в соответствии с произвольно изменяющимся задающим сигналом);
программно-управляемый (электропривод обеспечивает перемещение исполнительного органа в соответствии с заданной программой);
адаптивный (электропривод автоматически обеспечивает оптимальный режим движения исполнительного органа при изменении условий его работы);
позиционный (электропривод обеспечивает регулирование положения исполнительного органа рабочей машины).
По способу соединения двигателя с рабочим органом:
редукторный электропривод, содержащий один из видов механического передаточного устройства;
безредукторный, в котором электродвигатель непосредственно соединен с исполнительным органом;
конструктивно-интегрированный, в котором приводной электродвигатель конструктивно объединен с рабочим органом.
По роду электрического преобразовательного устройства различают:
вентильный электропривод, преобразовательным устройством которого является вентильный преобразователь энергии. Разновидностями вентильного электропривода являются ионный и полупроводниковый электроприводы. Полупроводниковый электропривод, в свою очередь, делится на тиристорный и транзисторный электроприводы, преобразовательным устройством в которых является соответственно тиристорный или транзисторный преобразователь электроэнергии;
система управляемый выпрямитель — двигатель (УВ—Д) — вентильный электропривод постоянного тока, преобразовательным устройством которого является регулируемый выпрямитель;
система преобразователь частоты — двигатель (ПЧ — Д) — вентильный электропривод переменного тока, преобразовательным устройством которого является регулируемый преобразователь частоты;
система генератор — двигатель (Г — Д) и магнитный усилитель — двигатель (МУ — Д)—регулируемый электропривод, преобразовательным устройством которого является соответственно злектромашинный преобразовательный агрегат или магнитный усилитель.
По назначению электропривод разделяют:
на привод главного движения, привод подачи и привод вспомогательных перемещений. Отдельную группу составляет электропривод ПР.
По роду тока выделяют электропривод постоянного и переменного тока.
По виду электрического двигателя: электропривод с двигателем постоянного тока, асинхронный электропривод, синхронный электропривод.
По виду управления различают:
1. Нерегулируемый электропривод, используемый для привода станков с постоянной скоростью (скорость механизмов с таким приводом не регулируется или регулируется механическим способом).
2. Регулируемый электропривод, который позволяет электрическим способом регулировать скорость механизмов станков в широком диапазоне независимо от изменения нагрузки.
3. Следящий электропривод обеспечивает движение механизмов по определенной программе. Нужно отметить, что термин этот не совсем точен. Следящим называют электропривод, который воспроизводит управляющее воздействие, изменяющееся по заранее неизвестному закону.
Следящий электропривод может работать в режиме точного позиционирования, который обеспечивает перемещение механизмов станка в некоторые фиксированные точки, выделенные на траектории их движения. Закон изменения скорости привода между этими точками выбирается исходя из требований производительности и точности позиционирования и на форму обрабатываемой детали влияния не оказывает.
4. Адаптивный АЭ, автоматически изменяющий структуру и параметры системы управления. Адаптация позволяет повысить производительность и точность металлообработки.
Дополнение
В приводе подачи высокоавтоматизированных станков и ПР применяют двигатели следующих типов:
1. Двигатели постоянного тока традиционного исполнения с улучшенными статическими и динамическими характеристиками, имеющими уменьшенный момент инерция якоря, повышенную перегрузочную способность и улучшенную коммутацию.
2. Малоинерционные двигатели постоянного тока, в которых рекордное быстродействие обеспечивается за счет продольного снижения момента инерции якоря. Наиболее распространены двигатели с дисковым якорем, имеющим печатную или штампованную обмотку, и двигатели с гладким цилиндрическим якорем, у которых длина больше диаметра. Во всех случаях такие якоря обладают малой массой, что уменьшает постоянную времени нагрева и исключает длительную работу машины с моментом нагрузки, превышающим номинальный. Малоинерционные двигатели, так же как и двигатели традиционного исполнения, соединяют с ходовым винтом станка через промежуточную механическую передачу.
3. Высокомоментные двигатели — это тихоходные двигатели постоянного тока с возбуждением от постоянных магнитов. Массивный якорь обеспечивает термическую инерционность и как следствие, возможность длительно работать с большим перегрузочным моментом (такие двигатели допускают 6…10-кратную перегрузку по моменту). Особенностью этих двигателей является возможность приводить в движение ходовой винт станка, минуя промежуточные механические передачи.
Электропривод подачи с высокомоментными двигателями обеспечивает диапазон регулирования скорости порядка нескольких тысяч.
Использование постоянных магнитов обеспечивает постоянство магнитного потока в динамических режимах и высокий динамический момент. Высокомоментные двигатели не имеют потерь в цепи возбуждения и по размерам меньше, чем аналогичные двигатели с электромагнитным возбуждением. Однако отсутствие дополнительных полюсов приводит к коммутационным ограничениям по нагрузке и скорости, что заставляет применять зависимое токоограничение, при котором допустимая нагрузка уменьшается по мере возрастания скорости.
4. Дальнейшим развитием конструкции машин постоянного тока являются бесконтактные двигатели, представляющие собой синхронную машину с возбуждением от постоянных магнитов и инвертором, управляемым специальным датчиком в зависимости от угла поворота ротора. В бесконтактных двигателях устранен коллекторно-щеточный узел, что повышает срок службы двигателя и снимает коммутационные ограничения по моменту и скорости.
5. Линейные электродвигатели в станкостроении до настоящего времени применялись редко, т.к. в большинстве случаев их рабочие характеристики (тяговая сила и линейная скорость) не соответствуют требованиям технологического процесса. Исключение составляют малые станки и ПР. Однако последние разработки Японских специалистов компании Sodick в этой области позволили создать весьма перспективный линейный двигатель для электроэрозионных станков.
6. Область применения дискретных (шаговых) двигателей постепенно сужается. В настоящее время шаговые двигатели в приводе подачи станков с ЧПУ применяют редко. Вместе с тем на современных станках есть немало видов движений, которые удобно осуществлять с помощью шаговых двигателей (малые периодические дозируемые подачи в станках шлифовальной группы, движения, связанные с компенсацией износа инструмента, точные угловые перемещения и др.).
7. В настоящее время регулируемый электропривод на основе асинхронного двигателя базируется на серийных двигателях. В дальнейшем станкостроению обязательно потребуется двигатель, предназначенный для работы в широком диапазоне изменения скорости и оснащенный вспомогательными устройствами и датчиками обратной связи.
В приводе главного движения станка основное значение имеет нерегулируемый асинхронный короткозамкнутый двигатель. Значительную роль играют двигатели постоянного тока с электромагнитным возбуждением в регулируемом электроприводе с двухзонным управлением. Здесь также необходимы электродвигатели с расширенным диапазоном регулирования изменением магнитного потока, что позволит полностью отказаться от механического регулирования скорости при постоянной мощности и значительно упростить конструкцию станка.
К основным направлениям развития современного ЭП относятся:
- разработка и выпуск комплектных регулируемых ЭП с использованием современных преобразователей и микропроцессорного управления;
- повышение эксплуатационной надежности, унификации и улучшение энергетических показателей ЭП;
- расширение области применения регулируемого асинхронного ЭП и использование ЭП с новыми типами двигателей, а именно линейными, шаговыми, вентильными, вибрационными, повышенного быстродействия, магнитогидродинамическими и др.;
- развитие научно-исследовательских работ по созданию математических моделей и алгоритмов технологических процессов, а также машинных средств проектирования ЭП;
- подготовка инженерно-технических и научных кадров, способных проектировать, создавать и эксплуатировать современный автоматизированный электропривод.
Основные тенденции развития АЭП и его классификация