
Выбор рациональной структуры, основных компонентов и систем управления электротрансмиссий гусеничных машин
| Вид материала | Автореферат |
СодержаниеОбщая характеристика работы Содержание работы В первой главе Во второй главе В третьей главе В четвертой главе |
- Понятия о базах данных и системах управления ими. Классификация баз данных. Основные, 222.31kb.
- Темы дисциплины Компонентов (Указать индекс компонентов), 133.93kb.
- Темы на курсовую работу по дисциплине «Теория управления» Преподаватель Чаусова, 29.2kb.
- Рабочая программа дисциплины Впроцессе изучения дисциплины «Теория «рациональной бюрократии, 1228.01kb.
- В курсе рассматриваются семь основных тем, 76.92kb.
- Организация рациональной структуры управления авиатранспортным комплексом северного, 419.68kb.
- Правительстве Российской Федерации» к э. н., доцент кафедры «Макроэкономика» Арефьев, 19.06kb.
- Ования вычислительных машин, и освоение принципов организации, архитектур и схемотехники, 19.68kb.
- Бизнес-планирование туристской фирмы. Выбор и анализ средств рекламы товаров (на примере, 43.78kb.
- Учение студентов основам математического моделирования, необходимых при проектировании,, 28.67kb.
На правах рукописи
Назаров Сергей Витальевич
Выбор рациональной структуры, основных компонентов и систем управления электротрансмиссий гусеничных машин
Специальность 05.09.03 – «Электротехнические комплексы и системы»
АВТОРЕФЕРАТ
диссертации на соискание ученой степени
кандидата технических наук
Москва – 2007
Работа выполнена в Московском автомобильно-дорожном институте (ГТУ)
Научный руководитель
- доктор технических наук, профессор Ютт Владимир Евсеевич
Официальные оппоненты:
Доктор технических наук, профессор Марсов Вадим Израилевич
Кандидат технических наук, доцент Малеев Руслан Алексеевич
Ведущая организация – ФГУП Научно-исследовательский и
экспериментальный институт автомобильной
электроники и электрооборудования
Защита состоится 24 апреля 2007 года в 10 часов в ауд.42 на заседании диссертационного совета Д212.126.05 при Московском автомобильно-дорожном институте (ГТУ) по адресу:
г.Москва, 125319, Ленинградский пр-кт, 64
С диссертацией можно ознакомиться в научно-технической библиотеке
МАДИ (ГТУ)
Автореферат разослан «23» марта 2007 г.
Ученый секретарь
диссертационного совета,
кандидат технических наук, доцент Н.В.Михайлова
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность темы
В настоящее время актуальной задачей является перемещение монтажно-транспортных агрегатов типа МТА-40, предназначенных для транспортирования модулей и блоков семейства блочно-модульных буровых установок. Для буксирования агрегатов такого типа необходимо от 2 до 9 тракторов марки Т-100М в зависимости от условий и комплектации. При этом имеют место неравномерность работы тракторов, сложности в организации процесса перевозки и управления ею на различных этапах. Кроме того, существенные ресурсы требуются для обеспечения жизнедеятельности дополнительных членов бригады, что в условиях длительной автономности приводит к значительному повышению затрат.
Уменьшение количества техники, находящейся на заповедной территории способно также существенно снизить пагубное влияние результатов человеческой деятельности на девственную природу.
Поэтому применение тягового средства, способного обеспечить транспортировку агрегатов МТА-40, представляет значительный интерес.
Использование тяжелых гусеничных машин для выполнения обозначенной задачи в предельно тяжелых условиях обусловливает основные требования к подвижности и энергообеспеченности гусеничных машин (ГМ), которые могут быть реализованы за счет совершенствования тягово-динамических и топливно-экономических свойств, повышения уровня автоматизации управления на основе разработки и применения в ГМ автоматических бесступенчатых трансмиссий и электронных систем управления ими. Это позволяет, наряду с другими достоинствами, реализовать плавное увеличение тяговых возможностей до значения, равного возможности движения по сцеплению.
Реализация тягового потенциала машины в условиях слабой несущей способности опорной поверхности и высокого сопротивления на крюке возможно на основе автоматизации применения бесступенчатых трансмиссий. Автоматические трансмиссии обеспечивают, близкий к оптимальному выбор параметров управления для требуемого режима и условий движения. Они позволяют снять с механика ряд функций по управлению движением, облегчить процесс управления, что в итоге повышает его работоспособность, снижает утомляемость, что также способствует повышению скорости движения. Наиболее целесообразна автоматизация процесса управления движением ГМ и обеспечение дистанционного управления, которые реализуются при применении электрических бесступенчатых трансмиссий. Таким образом, тема и выбранное направление исследования можно считать актуальным.
Создание ГМ с бесступенчатыми электрическими трансмиссиями сопряжено с определенными трудностями, обусловленными недостаточной разработкой теоретических положений, посвященных исследованию эффективности различных структур электротрансмиссией (ЭТ), динамики гусеничных машин с электротрансмиссией переменного тока, методики выбора из ряда возможных вариантов и построения структурных схем трансмиссий такого типа.
Цель и задачи работы. Целью настоящей диссертационной работы является научно обоснованный выбор рациональной структуры, основных компонентов и систем управления ЭТ, обеспечивающих высокий уровень тяговых свойств, энергообеспеченности и автоматизации управления движением ГМ при повышенном сопротивлении на крюке.
Для достижения указанной цели поставлены задачи исследования:
1. Обоснование необходимости и возможности применения в вездеходах бесступенчатых электротрансмиссий.
2. Разработка методики сравнительной оценки эффективности и выбора рациональной структуры ЭТ, типа и характеристик ее основных компонентов.
3. Уточнение математической модели бесступенчатой ЭТ для исследования динамических характеристик машины с электротрансмиссией и получения исходных данных в целях сравнительной оценки эффективности предпочтительных вариантов ЭТ.
4. Исследование и выбор возможных рациональных режимов управления и структуры системы управления ЭТ.
5. Научное обоснование выбора рационального структурного построения ЭТ, разработка практических рекомендаций по режимам и системам управления, типу и характеристикам основных компонентов и оценка эффективности предпочтительных вариантов ЭТ для заданного класса ГМ.
Научная новизна заключается в следующем:
1. Разработана комплексная методика оценки эффективности и выбора рациональной структуры ЭТ, позволяющая на основе набора частных показателей свойств электротрансмиссии для ГМ сформировать систему групповых частных показателей основных свойств ЭТ, дающая возможность оценить влияние структурной схемы ЭТ и применения электрических машин различного типа на общую эффективность электротрансмиссий.
2. Предложен комплекс уточненных моделей элементов ЭТ переменного тока, позволяющий построить обобщенную систему взаимосвязанных моделей ЭТ и исследовать динамические свойства вездехода во время работы в различных условиях при переменной нагрузке на ведущих колесах и изменении режимов работы ДВС.
3. Уточнена математическая модель ЭТ переменного тока на базе преобразователя со звеном постоянного тока и молекулярного накопителя энергии (МНЭ), позволяющая исследовать работу в различных режимах, рассчитывать основные динамические характеристики ЭТ и осуществлять выбор параметров основных компонентов ЭТ для использования в ГМ заданного класса при различных условиях нагружения.
На защиту выносятся:
-Результаты экспериментальных исследований физических моделей электроприводов с использованием МНЭ в цепи питания.
-Уточненная математическая модель ЭТ переменного тока на базе преобразователя со звеном постоянного тока и МНЭ.
-Комплекс законов управления для различных диапазонов частот питающего напряжения и соответствующая структурная схема системы управления ЭМТ.
-Обобщенная методика, позволяющая провести сравнительную оценку эффективности применения электротрансмиссий ГМ и произвести выбор рационального варианта структурной схемы и компонентов ЭТ.
-Технические предложения по структуре ЭМТ, типу и характеристикам основных компонентов электромеханической трансмиссии переменного тока.
Достоверность результатов подтверждается достаточной сходимостью экспериментальных данных и результатов моделирования, определением необходимого количества опытов на основе таблицы распределения Стьюдента, оценкой воспроизводимости результатов по однородности дисперсии по критерию Кохрена, определением параметров функции отклика в виде уравнения регрессии с помощью критерия Фишера.
Практическая значимость и реализация результатов заключается в том, что:
– разработана обобщенная методика, позволяющая провести сравнительную оценку эффективности применения электротрансмиссий ГМ и произвести выбор оптимального варианта структурной схемы и компонентов ЭТ, упростить решение задачи оценки эффективности по векторному показателю;
– уточнена математическая модель ЭТ переменного тока на базе преобразователя со звеном постоянного тока и МНЭ, позволяющая исследовать ее работу в различных режимах и обеспечить выбор исходных данных для исследования типа и оптимальных параметров основных компонентов ЭТ для использования их в ГМ заданного класса.
– предложена для заданного класса ГМ (до 40 т) оптимальная структура электромеханической трансмиссии с поперечным валом, одним центральным тяговым электродвигателем (ТЭД) и электродвигателем привода поворота малой мощности с «нулевым» валом, которая превосходит существующие проекты перспективных ЭТ классического типа по показателям удельного объема и массы, а также серийную ГМТ по надежности, технологичности производства и ремонта;
– применен в структуре электромеханической трансмиссии МНЭ, обеспечивающий эффективное использование мощности, рекуперируемой от основного ТЭД, при движении по инерции и торможении, уменьшающий значение обратных токов, габариты и мощность специальных рассеивающих сопротивлений, снижающий пульсации и уровень падения напряжения на общей шине постоянного тока при изменениях нагрузки;
– разработаны технические предложения и практические рекомендации по структуре ЭМТ, типу и характеристикам основных компонентов электромеханической трансмиссии переменного тока, которые могут быть использованы при создании перспективных электротрансмиссий современных ГМ.
Материалы диссертации используются в учебном процессе при чтении курсов лекций по электрическим машинам и электрооборудованию автомобилей в Московском автомобильно-дорожном институте (ГТУ).
Апробация работы. Основные результаты работы докладывались и обсуждались в 2004-2006 гг. на заседаниях кафедры «Электротехника и электрооборудование» МАДИ (ТУ).
Публикации. Основное содержание работы опубликовано в 6 печатных работах.
Структура и объем диссертации. Диссертационная работа состоит из введения, 4 глав, заключения, списка литературы из 54 наименований. Работа выполнена на 167 страницах машинописного текста, содержит 29 рисунков и 20 таблиц.
Содержание работы
Во введении обоснована актуальность работы, формулируется цель исследования, приведена общая характеристика работы. Отмечается, что развитие средств, обеспечивающих транспортирование буровых установок при полном отсутствии дорог, в значительной степени влияет на динамику разведки газа и нефти в России. Актуальной задачей является перемещение монтажно-транспортных агрегатов типа МТА-40, для буксирования которых необходимо от 2 до 9 тракторов марки Т-100М в зависимости от условий и комплектации. При этом имеет место неравномерность работы тракторов, сложность управления и организации перевозки. Существенные ресурсы необходимы для обеспечения ГСМ и расходными материалами тракторов, а также для обеспечения жизнедеятельности дополнительных членов бригады, что в условиях длительной автономности приводит к значительному повышению затрат.
Уменьшение количества техники, находящейся на заповедной территории способно также существенно снизить негативное влияние результатов человеческой деятельности на девственную природу. Поэтому применение тягового средства, способного решать вопросы транспортировки агрегатов МТА-40, представляет значительный интерес.
В первой главе проведена оценка трансмиссий ГМ, их влияние на автоматизацию процессов управления и сформулированы требования к электротрансмиссиям, соблюдение которых необходимо обеспечить при выборе структуры, типов и характеристик основных компонентов ЭТ. При анализе и сравнительной оценке структур ЭТ вездеходов (применительно к гусеничной машине весовой категории 20-60 т) сделаны следующие основные выводы: для размещения ЭТ в гусеничной машине наиболее важной задачей является уменьшение её габаритов и массы; для уменьшения массогабаритных показателей необходимо применение быстроходных электрических машин; наиболее приемлемой является ЭМТ на переменном токе; для расширения скоростного диапазона необходима установка двухступенчатого редуктора.
Проведен обзор работ отечественных и зарубежных авторов, посвященных проблемам выбора структуры и систем управления электрических трансмиссий. В частности работы Богоявленского В.Н., Груздева Н.И., Ганнуса К.П., Степанова А.Д., Погарского Н.А., Ефремова И.С., Болдова Н.А., Андреева Ю.М., Иванченко П.И., Лебедева С.П., Ильинского А.Д., Бибикова В.И., Ждамирова А.Ф., Волкова В.Д. и др. Анализ работ показал, что в настоящее время недостаточно исследованы вопросы выбора рациональной структуры, типа и параметров основных компонентов ЭТ переменного тока с целью получения для заданного класса машин высоких тягово-скоростных, топливно-экономических и массогабаритных показателей. Вопросы оценки ЭТ по обобщенным показателям не нашли должного отражения в соответствующих исследованиях, а отдельные работы в этом направлении требуют развития, расширения границ области исследования и большей конкретизации. При оценке эффективности не используются их математические модели в целях выбора оптимальных исходных данных и обеспечения требуемых динамических характеристик проектируемых ЭТ.
Отсутствуют наработки по созданию и исследованию ЭТ для гусеничных машин, предназначенных к применению в специфических условиях тундры для обеспечения перемещения сверхтяжелых грузов.
Во второй главе приведена методика оценки вариантов электротрансмиссий и уточненная математическая модель ЭТ переменного тока на базе преобразователя со звеном постоянного тока и МНЭ.
С этой целью выделены три группы показателей ЭТ: показатели функционирования (тяговые, разгонные и тормозные характеристики объекта, достаточность мощности энергоустановки), показатели эксплуатационных свойств (надежности, времени восстановления работоспособного состояния и контролепригодности) и показатели конструктивного исполнения (удельный объем и масса, коэффициент компактности). Сформирована система приоритетов уровня значимости выделенных групп показателей и проведено их ранжирование.
При совершенствовании ЭТ вопрос обеспечения требуемых мощностных, тягово-скоростных характеристик и качества электрической энергии становится первостепенным, при определении значимости групп показателей приоритет отдан обобщенному показателю функционирования (Wф).
Показатели конструктивного исполнения (Wки) существенно влияют на выбор оптимального варианта ЭТ. На этапе предварительного отбора конкурентоспособных вариантов накладываются ограничения по максимально допустимым объёму и массе электротрансмиссий и возможности компоновки их основных элементов в заданном классе вездеходов. В работе принято, что значимость группы показателей конструктивного исполнения занимает второе место после показателей функционирования.
Показатель эффективности эксплутационных свойств (Wн), в которых главная роль принадлежит надежности, безусловно, оказывает важное влияние на эффективность электротрансмиссий. Но в настоящее время для различных элементов ЭТ переменного тока достигнут такой уровень надежности, который соответствует оптимальному с точки зрения стоимости разработки, изготовления и эксплуатации (общая стоимость систем имеет минимум в интервале значений вероятности безотказной работы 0,85 - 0,95).
Таким образом, определена система предпочтений и проведено ранжирование выделенных групповых частных показателей:
Wэт=f(Wф → Wки→ Wн),
где Wэт - групповой комплексный показатель эффективности ЭТ.
Система частных показателей, определенная на основе полного набора частных свойств, позволила представить обобщенный комплексный показатель эффективности ЭТ вездехода в общем виде следующим выражением:
WЭТ= lфWф (
 УСР, QГУ, PНЭ,
УСР, QГУ, PНЭ,  UП,
UП,  , PПОТ UКП, UСН, QМИ, JРЭ) +
, PПОТ UКП, UСН, QМИ, JРЭ) ++lкиWки(GУД, VУД) + lнWн(P(t)),
где
УСР - относительный показатель подвижности; QГУ - мощность генераторной установки; PНЭ - показатель непрерывности обеспечения электрической энергией элементов электротрансмиссии; - показатель эффективности использования суммарной мощности энергоисточника в системе регулируемого электропривода; UП - допустимый уровень пульсаций напряжения; UКП - допустимый уровень коммутационных перенапряжений; PПОТ - относительный показатель мощности основных потребителей; UСН - допустимый уровень снижения напряжения; QМИ - допустимая мощность импульсов определенной продолжительности; JРЭ -показатель использования рекуперируемой энергии; P(t) - показатель надежности; GУД - показатель удельной массы; VУД - показатель удельного объема; lф, lн, lки - принятые коэффициенты значимости соответствующих групп показателей.Показатель эффективности функционирования Wф предложено определять в виде:
Wф=μ1
УСР + μ2PНЭ + μ3JРЭ + μ4PПОТ,где
 - коэффициенты весомости соответствующих показателей.
- коэффициенты весомости соответствующих показателей.Значения коэффициентов весомости показателей функционирования определены путем экспертного опроса специалистов и последующего анализа его результатов.
Значения остальных частных показателей комплексного показателя функционирования QГУ,
UП, UКП, UСН, QМИ (мощность генераторной установки, допустимый уровень пульсаций напряжения, допустимый уровень коммутационных перенапряжений, допустимый уровень снижения напряжения, допустимая мощность импульсов соответственно) определяются условиями безотказной работы потребителей и заданы в виде ограничений: QГУ < QСУМ.ПОТР;
UП ≤ UПдоп;UКП ≤ UКПдоп;
UСН ≥ UСНдоп;
QМИ ≤ QМИдоп.
При формировании комплексного показателя конструктивного исполнения использовался общепринятый подход к оценке качества промышленной продукции, заключающийся в объединении относительных показателей в единый путем суммирования произведений этих показателей на коэффициент их весомости. Обобщенный показатель конструктивного исполнения представлен выражением вида
 .
.Значения коэффициентов весомости μ6, μ5 относительного показателя технического уровня определены путем экспертного опроса с последующим анализом его результатов.
Обобщенные коэффициенты оценки удельного объема (Коб) и массы (Квес) представлены как:
VУД =
 ; GУД =
; GУД = ;
;Коб = 1 – VУД ; Квес = 1 – GУД ,
где Vуд.i, Gуд.i, удельные показатели мощности по объему и массе (генератора, выпрямителя, инвертора, тягового двигателя), Vi, Gi объем и масса соответствующего элемента трансмиссии, Vмто – объем моторно-трансмиссионного отделения, GГМ – масса ГМ.
Влияние надежности технической системы на ее эффективность определен как вероятность ее безотказной работы P(t).
Так как целью оценки надежности в работе ставится установление предпочтений между различными вариантами ЭТ, а не определение абсолютного значения показателя, то приняты следующие допущения:
электротрансмиссия рассматривается как система без резервирования, отказ любого элемента которой соответствует отказу системы в целом;
элементы эксплуатируются после обкатки, т.е. интенсивность потока отказов
 = const.
= const.С учетом этого вероятность безотказной работы системы принята:
P(t) =
 ,
,где
= 
 интенсивность отказов системы равна сумме интенсивностей отказов ее элементов (n).
интенсивность отказов системы равна сумме интенсивностей отказов ее элементов (n).Следовательно, зная интенсивность отказов элементов, определяется вероятность безотказной работы различных вариантов ЭТ и выбирается наиболее предпочтительный с точки зрения надежности.
Значения коэффициентов значимости (ф, ки, н) соответствующих групп показателей определены по соотношениям приоритетности свойств по ранговому методу первого типа и имеют линейную аналитическую зависимость формирования группового комплексного показателя WЭТ (рис. 1).
Первый этап включает выбор системы частных показателей для ЭТ, отбор их значений по техническим требованиям к вариантам и формирование группового комплексного показателя эффективности.
-
1. Выбор системы частных показателей
S=[Q11,Q12,Q13,….Qn]
2. Определение показателей, выступающих в качестве ограничений и их уровней
UП ≤ UПдоп; UКП ≤ UКПдоп; UСН ≥ UСНдоп;
QГУ ≤ QСУМ.ПОТР; QМИ ≤ QМИдоп.
3. Проведение предварительной технико-экономической оценки по массогабаритным, стоимостным показателям и показателям надежности
4. Формирование групповых показателей ЭТ
Wф (VУСР, PНЭ,, JРЭ); Wн(P(t)); Wки(GУД, VУД)
5. Ранжирование групповых показателей ЭТ
Wi Wi-1… Wn
Wi-1… Wn
6. Предварительный отбор допустимых эффективных вариантов
 =
=
7. Формирование группового комплексного показателя эффективности
WЭТ= lфWф+ lнWн+ lкиWки
8. Окончательный выбор варианта электротрансмиссии
 =(Wi – max)
=(Wi – max)
Рис.1. Блок-схема выбора оптимального варианта системы
Второй этап – выбор эффективного рационального варианта ЭТ из конечного множества допустимых вариантов по выбранному групповому комплексному показателю эффективности.
Использование данной методики с возможностью исключения пункта 7 блок-схемы выбора рационального варианта дает возможность отказаться от обобщения групповых показателей, различных по физической сущности, осуществлять выбор последовательно (на каждом шаге) по одному показателю и с достаточной точностью учесть влияние структуры и качественных характеристик на значения показателей эффективности и конструктивного исполнения.
При описании процесса движения вездехода с электромеханической трансмиссией и построения уточненной математической модели (ММ) принят ряд допущений, которые позволили значительно упростить модель без внесения существенных погрешностей в результаты расчетов.
Для изучения возможности улучшения тягово-динамических характеристик ГМ в звено постоянного тока преобразователя напряжения и частоты включена батарея молекулярных накопителей энергии.
Вольтамперная характеристика на зажимах батареи емкостных накопителей представлена уравнением
 ,
,где UЕН – напряжение на зажимах батареи МНЭ; UЕНо – напряжение на зажимах МНЭ при отсутствии процессов заряда и разряда; IЕН – ток батареи МНЭ; rЕН – внутреннее сопротивление батареи МНЭ.
 ;
; ,
,где nен – количество параллельно включенных емкостных накопителей (ЕН) в батарее; Iзен, Iрен – соответственно токи заряда и разряда ЕН.
При заряде накопителя постоянным током напряжение на нем определяется по следующей формуле
 ,
,где СЕН – емкость батареи накопителя; tзен – время заряда ЕН.
Переходный процесс изменения напряжения на зажимах накопителя в интервале времени
 может быть описан зависимостью
может быть описан зависимостью
 ,
,где UЕН1 – напряжение в конце i-го интервала времени; UЕН0 – напряжение в начале i-го интервала времени; IЕН1 – ток емкостного накопителя средний в i-ом интервале; ∆t – длительность интервала; Т1= Сен(rен+Rяц) – постоянная времени ЕН и обмотки якоря; Rяц – эквивалентное сопротивление якорной цепи ТЭД.
Запасаемая энергия будет EЗЕН, Дж
 .
.Отдаваемая энергия при разряде ЕРЕН в интервале времени
может быть рассчитана по формуле: ,
,где RН – сопротивление нагрузки в Ом, на которую производится разряд; UРЕН – напряжение разряда.
Требуемая номинальная электрическая емкость МНЭ для работы в интервале времени
в фарадах, рассчитывается по формуле: .
.Таким образом, комплексная методика оценки эффективности и выбора рациональной структуры ЭТ позволила на основе набора частных показателей свойств электротрансмиссии для ГМ сформировать систему групповых частных показателей основных свойств ЭТ. Комплекс уточненных моделей элементов ЭТ переменного тока стал основой для построения обобщенной системы взаимосвязанных моделей ЭТ и исследования динамических свойств гусеничной машины при работе на различных режимах при переменной нагрузке на ведущих звездочках и изменении режимов работы ДВС.
В третьей главе приведены теоретические и экспериментальные исследования ЭТ с МНЭ.
Проведенная систематизация вариантов режимов управления тяговыми асинхронными электродвигателями и их характеристики представлена в табл. 1.
Таблица 1.
| № | Вариант управления | Интервал частотного диапазона | Обобщенный закон регулирования | |
| Частные характеристики | Предельные характеристики | |||
| 11 | Фд*= const | Фд*= 1,0 1,25 | f1мин*≤ f1*≤ f1в* | U1* =ψU1(f1*, fs*, Фд*) fs*= fs.мах* |
| Фд*= 1,0 | f1в*≤ f1*≤ f1U* | U1*=ψU1(f1*, fs*, Рд1*) fs*=ψs1(f1*, Фд*, Рд1*) | ||
| 22 | Фд*=  | Фд*= | 1≤ f1*≤ f1U* | U1*=ψU2(f1*, fs*, Рд1*) fs*=ψs2(f1*, Фд*, Рд1*) |
| 33 | U1* = const | U1* = 1,4 1,5 | 1≤ f1*≤ f1мах* | U1* = U1.мах* fs*=ψs3(f1*, U1*, Рд1* |
| 44 | ηд = ηд.мах | ηд = ηд.мах | f1U*≤ f1*≤ f1мах* | U1* = ψU4(f1*, fs*, Рд1*) fs*=ψs4(f1*) |
| 55 | cosφд = cosφд.мах | f1U*≤ f1*≤ f1мах* | U1* = ψU5 (f1*, fs*, Рд1*) fs*=ψs5(f1*) | |
Сравнительный анализ вариантов управления позволил сделать вывод что, регулирование АД возможно осуществлять при следующих сочетаниях вариантов управления:
сочетание вариантов 1 и 3. В интервале от f1мин* до f1u* поддерживается постоянство номинального потока (вариант 1) и далее до f1mак* постоянство напряжения;
сочетание вариантов 1 и 4. В интервале от f1мин* до f1η* применяется вариант 1 (f1η* - частота, соответствующая выходу АД на управление при ηмак) и далее до f1mак* вариант 4;
сочетание вариантов 1, 2 и 3. В интервале от f1мин* до fн* регулируется по варианту 1, затем до fu* - по варианту 2 и далее до f1mак* - согласно варианта 3;
сочетание вариантов 1,2 и 4. Как и в предыдущем случае, до частоты fu* используются варианты 1 и 2 и далее до f1mак* вариант 4.
Наиболее целесообразным способом частотного регулирования АД для вездехода с ЭМТ переменного тока рекомендовано применять сочетание вариантов 1, 2, 3. Эти режимы управления обеспечивают получение частоты fмак и мощности Р = const при наименьшем значении напряжения и сравнительно простой системе регулирования.
В условиях бездорожья при достаточно частых сменах режимов движения тяговые АД практически работают в переходных режимах изменения скорости как в функции сигналов управления, так и в функции момента сопротивления вращению, определяемого дорожными условиями и другими случайными факторами.
В главе показано, что для оценки систем управления привода с АД можно ограничиться исследованием электромеханических переходных процессов на основе сформулированных специфических особенностей привода ЭТ.
Определены основные условия, предъявляемые к системе управления для обеспечения работы АД на устойчивой части механической характеристики, включающие:
-обеспечение на входе двигателя значения скорости изменения частоты ε=df1*⁄dt, которое должно быть меньше критического ускорения ротора ε рк=dω⁄dt
 ,
, где εрк – критическое ускорение ротора, ∆Мmak – максимально возможный критический момент двигателя, Тм – электромеханическая постоянная времени двигателя;
-обеспечение задания s(f)‹sk (Mд‹Mk) и формирования значения ε‹ εрк в соответствии с ускорением ротора.
Для реализации указанных требований и в соответствии с принятой взаимосвязью частоты и уровня напряжения на выходе преобразователя, схемой управления энергоисточника и структурной схемой стабилизации тягового двигателя по скольжению сформирована следующая структурная схема системы управления ЭТ с АД (рис. 2.)
Структурная схема управления включает контуры стабилизации скорости ротора АД, абсолютного скольжения и тока.
Для предотвращения ''жесткого'' режима управления АД при высоком темпе изменения частоты, когда ротор АД в силу большой инерционности не успевает за безинерционным магнитным полем и не выполняется условие ε ‹ εрк, в цепь передачи управляющего воздействия на устройство управления выпрямителем (ВУ) и преобразователя частоты (ПЧ) введено динамическое звено (ДЗ), с Кдз=1 и постоянной времени Тдз=Тм, в виде апериодического звена второго порядка.
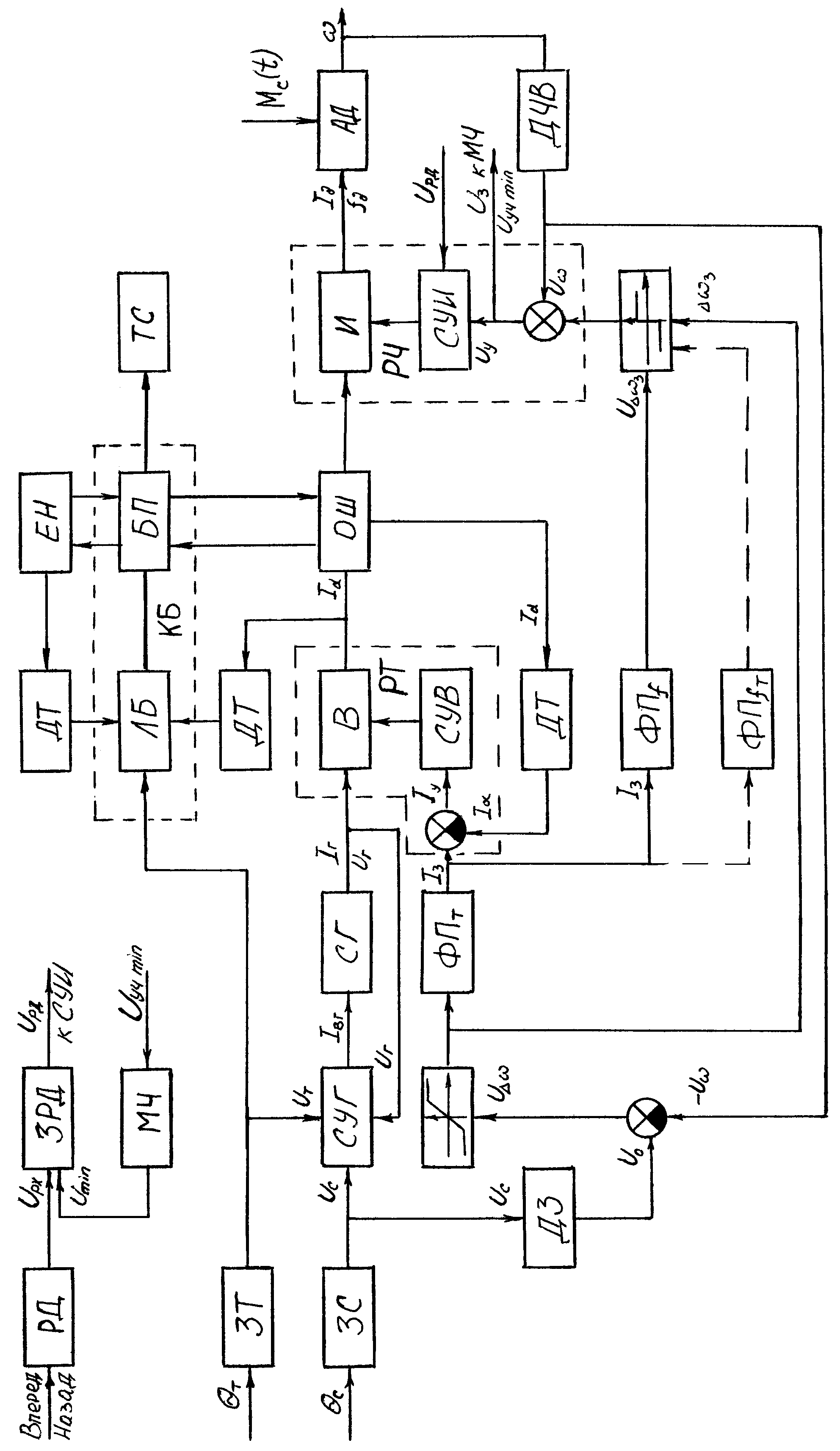
Рис. 2 Структурная схема управления ЭТ с АД
Частотно-токовое управление АД построено по трехконтурной схеме, в которой абсолютное скольжение fs задается в функции тока, а уставка тока регулируется в функции отклонения скорости от заданной с помощью датчика частоты вращения (ДЧВ).
Тормозной режим осуществляется выработкой задатчиком торможения (ЗТ) управляющего сигнала Uт, воздействующего на систему управления генератором, уменьшающей ток возбуждения генератора и тем самым, переводя ТЭД в генераторный режим работы.
Тормозное усилие регулируется изменением напряжения СГ в функции угла нажатия педали ЗТ. Регулирование напряжения в этом случае в отличие от тягового режима осуществляется в контуре СУГ.
Реверсирование движения вездехода осуществляется выработкой сигнала по реверсированию движения Uрх регулятора движения (РД), передающего его на задатчик реверсирования движения (ЗРД).
Схема автоматического управления асинхронным двигателем с короткозамкнутым ротором, управляемым тиристорным преобразователем с автономным инвертором тока предложена в виде, представленном на рис. 3.
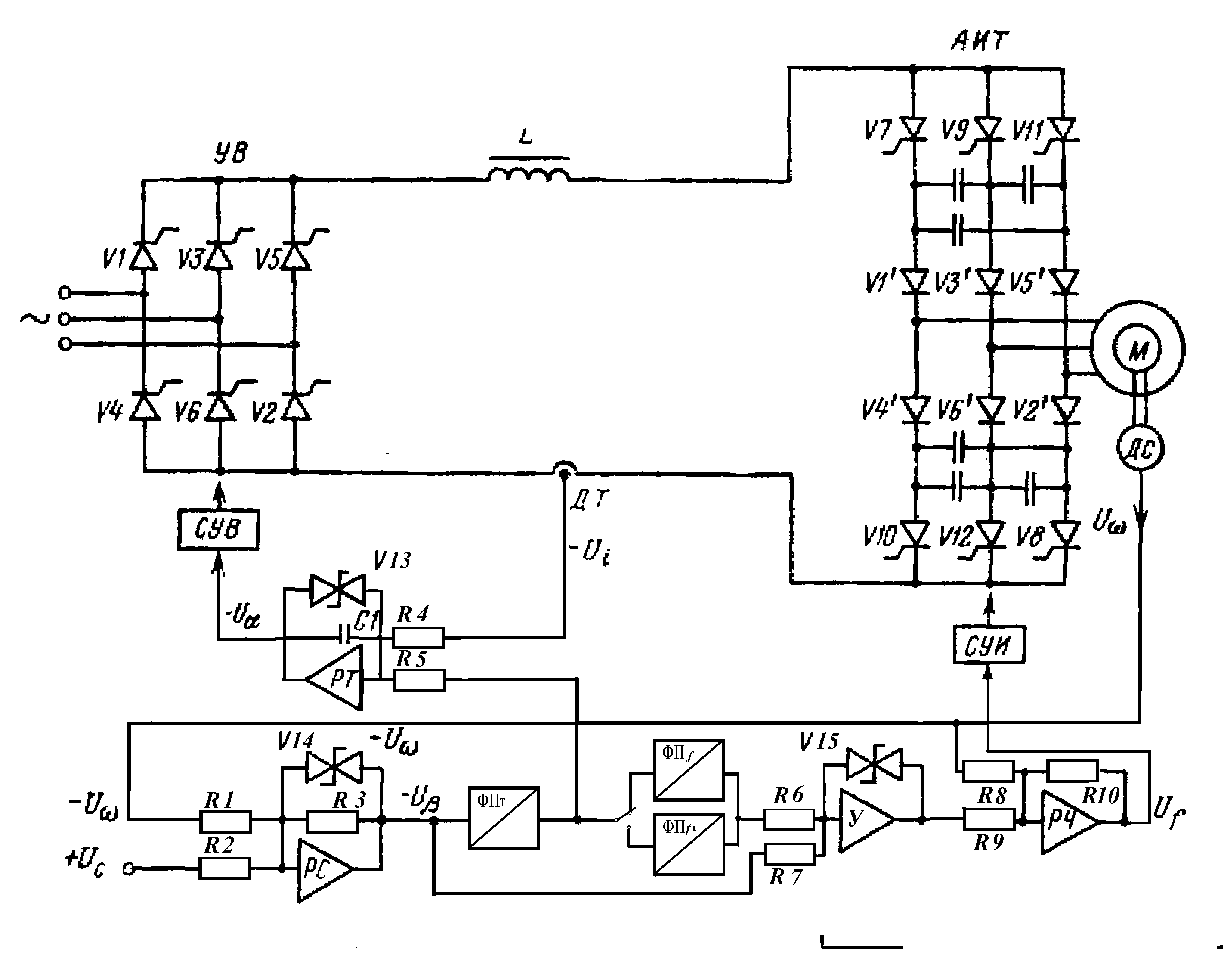
Рис. 3. Схема управления асинхронным двигателем с короткозамкнутым ротором
Блок регулирования для этой схемы построен по принципу подчиненного регулирования. Входными сигналами блока регулирования являются: задающее напряжение Uз,с, напряжение отрицательной обратной связи по выпрямленному току Ui, напряжение отрицательной обратной связи по угловой скорости асинхронного двигателя Uw.
Управляемый выпрямитель может быть выполнен по различным схемам и на основе различной элементной базы. В предложенной схеме (рис. 4) тиристоры, относительно просто управляемы однополупериодными магнитными усилителями МУ, с помощью которых можно регулировать угол включения тиристоров.
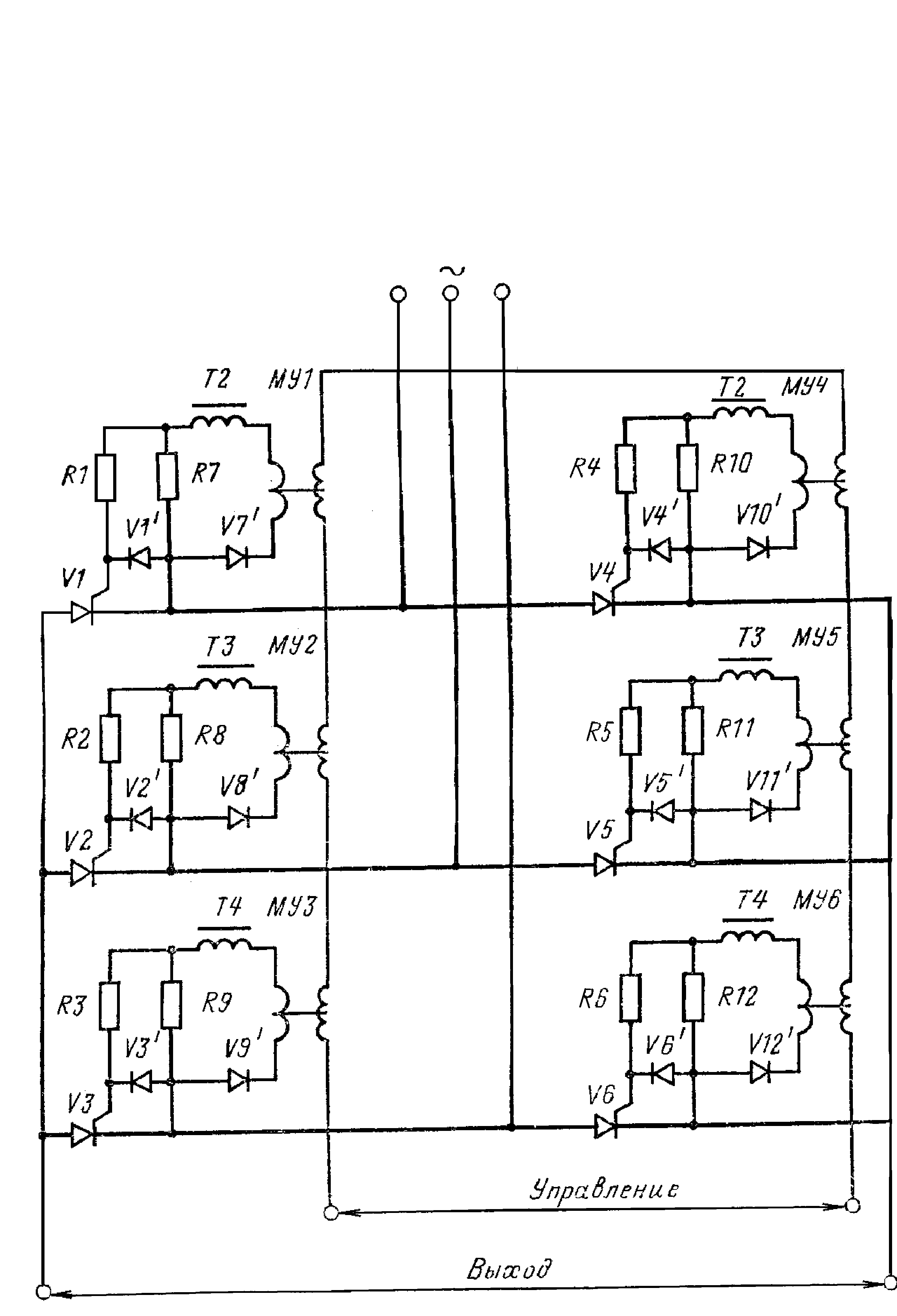
Рис. 4. Схема тиристорного выпрямителя и его системы управления.
Управление тяговым ВД осуществляется изменением напряжения Uд и угла опережения β в функции его угловой скорости ωд и положения ротора (или частоты тока fд). При этом необходимо учитывать, что нагрузочная способность ВД при малых углах β ограничивается пределом коммутационной способности, а при больших β пределом статической устойчивости схемы управления. Это предполагает выполнение следующих условий:
ток двигателя Iд по коммутационной способности не должен превышать предельного значения, например, для трехфазной мостовой схемы
 ,
, где χд эквивалентное коммутационное сопротивление; Ед коммутационная э.д.с.
Момент нагрузки не должен превышать максимальный момент ВД, определяемый выражением
 ,
, где p число пар полюсов; m1 число фаз двигателя; ra активное сопротивление фазы.
Для решения задачи по выбору законов изменения напряжения и тока введено среднее значение электромагнитного момента для ВД и выбор осуществляется с учетом следующих условий IД
 .
. Предложенная структурная схема системы управления ЭМТ обеспечивает устойчивую работу на участке механической характеристики при широком изменении момента нагрузки.
Оценка внешних условий движения проведена по двум типам дорожно-грунтовых условий (ДГУ): дорожно-грунтовые условия ДГУ-3 (главным образом различные грунтовые дороги) и ДГУ-4 (различные участки бездорожья на местности).
В
на крюке
частности, определены тяговые характеристики ГМ массой около 40 тонн с ЭМТ, ЭТ классического типа и ГМТ, приведены на рис. 5. Анализ полученных расчетных тяговых характеристик показал, что для ГМ с ЭТ, выполненной по классической схеме, средняя скорость движения для ДГУ-3 составила 8.28 м/с, а для ДГУ-4 8.02 м/с.
Р
ис. 5. Тяговая характеристика ГМ с различными типами трансмиссий
Для ГМ с ЭМТ, выполненной по центральной схеме с поперечным валом и электродвигателем поворота, средняя скорость движения для ДГУ-3 составила 8,76 м/с, а для ДГУ-4 8,29 м/с. Для ГМ с ГМТ значения средней скорости составили 8,3 и 7,85 м/с соответственно.
В четвертой главе предложена структурная схема перспективной ЭТ для заданного класса ГМ. Оптимальной для данного класса ГМ является структурная схема ЭМТ переменного тока с поперечным валом, полнопоточная для прямолинейного движения и двухпоточная для режима поворота.
Предлагаемый вариант трансмиссии состоит из следующих основных систем:
-основной тяговый привод, выполненный по центральной схеме, включающий тяговый электродвигатель, механический двухступенчатый редуктор и основной поперечный вал;
-рулевой привод, включающий электродвигатель поворота, "нулевой" вал (скорость вала при прямолинейном движении равна нулю) и два дифференциальных механизма поворота;
-тормозная система, состоящая из тормозных резисторов и механических фрикционных тормозов;
-гидравлическая система, состоящая из золотников управления фрикционными тормозами, золотников управления редукторами, насосов и аккумуляторов давления;
-генератор, связанный непосредственно с выходным валом дизельного двигателя. Механическая связь дизельного двигателя с трансмиссией отсутствует;
-силовые и управляющие электронные системы тягового электродвигателя, электродвигателя поворота, тормоза и генератора.
Наличие двухступенчатого редуктора и "нулевого" вала с дифференциальным механизмом поворота значительно снижают требования к электрическим двигателям и релейным силовым электронным компонентам по сравнению с полностью электрическим приводом.
Предлагаемая структурная схема (рис. 6) состоит из двух частей: электрической и механической.
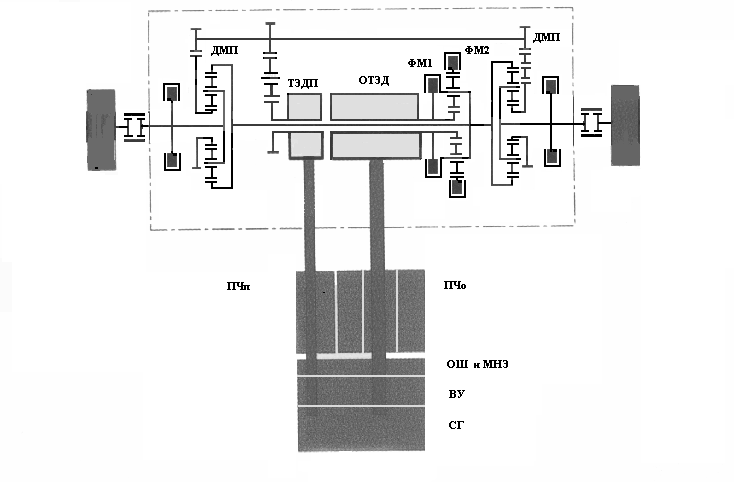
Рис. 6. Структурная схема ЭМТ
На рис. 7 представлена функциональная блок-схема системы управления электромеханической трансмиссией ГМ. На представленной блок-схеме введены следующие условные обозначения: 1 – двигатель внутреннего сгорания (ДВС); 2 – механический редуктор от ДВС к генератору; 3 – тяговый синхронный генератор (СГ); 4 –управляемый выпрямитель; 5 – инвертор тягового электродвигателя; 6 – инвертор двигателя поворота; 7 – электродвигатель поворота; 8 – тяговый электродвигатель; 9 – дифференциальный механизм поворота левый; 10 дифференциальный механизм поворота правый; 11 – двухступенчатая планетарная коробка передач; 12 – бортовой редуктор левого борта; 13 – бортовой редуктор правого борта; 14 – блок задания режимов движения; 15 – блок управления двигателем внутреннего сгорания; 16 – блок регулирования; 17 – блок управления выпрямителем; 18 – блок управления инверторами; 19 – датчик тока управляемого выпрямителя тягового двигателя; 20 – датчик угловой скорости электродвигателя поворота; 21 – датчик угловой скорости тягового электродвигателя; 22 – блок коммутации емкостного накопителя; 23 – блок МНЭ; 24 – датчик напряжения тягового электродвигателя; 25 – тормозные резисторы; 26 – датчик перехода системы в тормозной режим; 27 блок управления генератором.
Основное внимание уделено разработке блока коммутации МНЭ с элементами ЭМТ. На рис. 8. представлена функциональная схема блока коммутации, в состав которого входят следующие элементы: 28 – логический блок управления; 29 – шина постоянного тока; 30 – блок переключения емкостного накопителя и тормозных резисторов; 31 датчик напряжения емкостного накопителя; 32 датчик частоты вращения двигателя внутреннего сгорания.
Шина питания постоянного тока 29 обеспечивает электроэнергией составные элементы блока коммутации.
Логический блок 28 анализирует сигналы, поступающие от датчиков 24, 31 и датчика перехода в тормозной режим 25, и управляет работой блока переключения 30.
Блок переключения 30 осуществляет подключение и отключение блока МНЭ 23 и тормозных резисторов 26 к инверторам, в различных режимах работы трансмиссии.
Блок коммутации обеспечивает:
-автоматическое включение блока МНЭ на заряд при остановках машины, при переходе ТЭД в генераторный режим работы;
-подключение МНЭ на разряд при увеличении нагрузки на гусеницах и падении напряжения в общей шине постоянного тока при переходных режимах движения, а также подключение МНЭ в качестве усилителя мощности при трогании и разгоне машины;
-подключение тормозных резисторов к ТЭД при избытке рекуперируемой от ТЭД энергии и полностью заряженном емкостном накопителе.
Рис. 7. Блок-схема системы управления электрической трансмиссией
Рис. 8. Схема блока коммутации
Работа устройства коммутации емкостного накопителя предусмотрена на следующих режимах работы машины:
-при остановке машины и работе двигателя внутреннего сгорания на холостом ходу;
-при трогании и разгоне машины;
-при прямолинейном движении и постоянной внешней нагрузке и изменении отдачи мощности генератором;
-при прямолинейном движении и возрастающей внешней нагрузке на двух гусеницах одновременно;
-при прямолинейном движении и возрастающей внешней нагрузке на одной гусенице;
-при торможении;
-при осуществлении поворота.
Предлагаемая система управления электрической трансмиссией обеспечивает:
- улучшение характеристик машины в процессе разгона, торможения и реверсирования электропривода трансмиссии;
-эффективное накопление в ЕН электрической энергии, поступающей от тягового электродвигателя, работающего в генераторном режиме;
-устранение больших обратных токов в процессах рекуперации энергии, которую необходимо рассеивать на крупногабаритных сопротивлениях;
-повышение качества электрической энергии и надежности работы потребителей путем существенного снижения уровня пульсаций, провалов, бросков напряжений и токов за счет фильтрующих свойств ЕН.
Основные результаты и выводы.
1. На основе анализа существующих и перспективных структурных схем электротрансмиссий для тяговых средств разработана обобщенная методика, позволяющая провести сравнительную оценку эффективности применения электротрансмиссий ГМ и произвести выбор рационального варианта структурной схемы и компонентов ЭТ.
2. Уточненная математическая модель ЭТ переменного тока на базе преобразователя со звеном постоянного тока и МНЭ позволила исследовать ее работу в различных режимах и обеспечила выбор исходных данных для определения типа и оптимальных параметров основных компонентов ЭТ для использования их в ГМ заданного класса. На основе предложенной методики оценки и уточненной математической модели ЭТ в работе проведен анализ электрических трансмиссий заданного класса ГМ, оценена возможность установки в моторнотрансмиссионном отделении и эффективность их применения.
4. Произведены расчеты основных характеристик выбранной схемы в сравнении с существующими аналогичными типами трансмиссий, а также с гидромеханической трансмиссией. Предложена для заданного класса ГМ (до 40 т) рациональная структура электромеханической трансмиссии с поперечным валом, одним центральным ТЭД и электродвигателем привода поворота малой мощности с «нулевым» валом.
5. Установлено, что с применением в ГМ электромеханической трансмиссии её средняя скорость по совокупности дорожно-грунтовых условий повышается по сравнению с ГМ, имеющей электрическую трансмиссию классического типа, на 4…5 % и по сравнению с ГМ, имеющей гидромеханическую трансмиссию, – на 7…8 %. Доказано, что с применением электрических машин нового типа, масса ЭТ соизмерима с массой и объемом гидромеханической трансмиссии.
6. Разработана функциональная схема системы управления, обоснованы оптимальные режимы и параметры законов управления. Для повышения тягово-скоростных и экономических показателей и согласования работы МНЭ с основными компонентами ЭМТ предложена схема блока коммутации.
7. Выбрана структура ЭМТ для ГМ массой около 40 т. превосходящая существующие проекты перспективных ЭТ классического типа по показателям удельного объема и массы, а также серийную ГМТ по надежности, технологичности производства и ремонта.
8. В структуре электромеханической трансмиссии применен МНЭ, что обеспечило эффективное использование рекуперируемой от основного ТЭД мощности при движении по инерции и торможении, уменьшило значение обратных токов, габариты и мощность специальных рассеивающих сопротивлений, снизило пульсации и уровень падения напряжения на общей шине постоянного тока при изменениях нагрузки.
Основные положения диссертации опубликованы в следующих работах:
1. Ютт В.Е., Назаров С.В. МАДИ (ГТУ). Оценка структур перспективных электротрансмиссий вездехода / Сборник научных трудов. Автоматизация в строительстве и на транспорте. Москва 2005 г. стр. 79-82.
2. Ютт В.Е., Назаров С.В. МАДИ (ГТУ). Методика выбора рационального варианта электротрансмиссии / Сборник научных трудов. Методы прикладной информатики и коммуникационные технологии в автоматизации и управлении. Москва 2005 г. стр. 92-95.
3. Ютт В.Е., Назаров С.В. МАДИ (ГТУ). Комплекс математических моделей электротрансмиссий вездеходов / Сборник научных трудов. Методы прикладной информатики и коммуникационные технологии в автоматизации и управлении. Москва 2005 г. стр. 40-44.
4. Ютт В.Е., Назаров С.В. МАДИ (ГТУ). Выбор режимов и структурной схемы управления электротрансмиссией вездехода / Сборник научных трудов. Методы и модели автоматизации управления. Москва 2005 г. стр. 83-87.
5. Назаров С.В. МАДИ (ГТУ). Экспериментальные исследования элементов электротрансмиссии гусеничной машины / Сборник научных трудов. Методы и модели автоматизации управления. Москва 2006 г. стр. 175-178.
6. Сидоров Б.Н. Назаров С.В. Вездеходные машины с электротрансмиссией. – М.: Электроника и электрооборудование транспорта. №6, 2006 – с. 15-16.
Выходные данные автореферата Назарова С.В.
_____________________________________________________________
|
____________________________________________________________________________________________________________
Ротапринт МИДИ (ГТУ). 125319 Москва. Ленинградский просп., 64