
Н. Э. Баумана Курсовая работа Теория автоматического управления Валиев А. М. Руководитель проекта: Рассадкин Ю. И. Москва, 2006 Содержание Курсовая
| Вид материала | Курсовая |
СодержаниеТехническое задание Вывод уравнения силовой части Построение желаемой ЛАЧХ Нахождение координат рабочей точки Построение желаемой ЛАЧХ Расчет параллельного корректирующего устройства |
- Курсовая работа по дисциплине "Теория автоматизированного управления", 106.5kb.
- Программа дисциплины "Теория автоматического управления" Направление, 86.24kb.
- Службы курсовая работа по курсу «Система государственного управления» на тему: «Государственное, 376.12kb.
- Московский Государственный Университет технологий и управления курсовая, 5.68kb.
- Кафедра Экономического Анализа и Аудита курсовая, 512.81kb.
- А. Л. Шестаков 06 июня 2008 г. Группа Т62 стандарт организации система управления качеством, 966.21kb.
- Москва, 9-11 сентября 2009 г. Московский государственный технический университет им., 94.15kb.
- Методические рекомендации по выполнению курсовых работ курсовая работа по «Общей психологии», 54.44kb.
- Теория и методика математического развития, 63.97kb.
- Курсовая работа Социокультурные лакуны в статьях корреспондентов, 270.94kb.
Московский Государственный Технический Университет
имени Н. Э. Баумана

Курсовая работа
Теория автоматического управления
Выполнил:
Валиев А.М.
Руководитель проекта:
Рассадкин Ю.И.
Москва, 2006
Содержание
Курсовая работа 1
Теория автоматического управления 1
Техническое задание 3
Вывод уравнения силовой части 4
Построение желаемой ЛАЧХ 6
Нахождение координат рабочей точки 6
Построение желаемой ЛАЧХ 7
Расчет параллельного корректирующего устройства 7
Техническое задание
Спроектировать следящую САУ, согласно Схеме 1, в соответствии со следующими параметрами:
- Момент инерции приведенный к валу двигателя:
 [кг·м2],
[кг·м2],
- Сопротивление якорной цепи: Rя = 1.7 Ом
- Индуктивность якоря: Lя =
 Гн
Гн
- Коэффициент противо-ЭДС (конструктивная постоянная двигателя):
 =
=
- Конструктивная постоянная двигателя: kм =
- Скорость изменения управляющего воздействия:
- Максимальная ошибка:
Вывод уравнения силовой части
Выведем уравнение исполнительной части следящей системы. В системе в качестве исполнительного двигателя используется двигатель постоянного тока независимого возбуждения, схема которого представлена на Рис. 1.
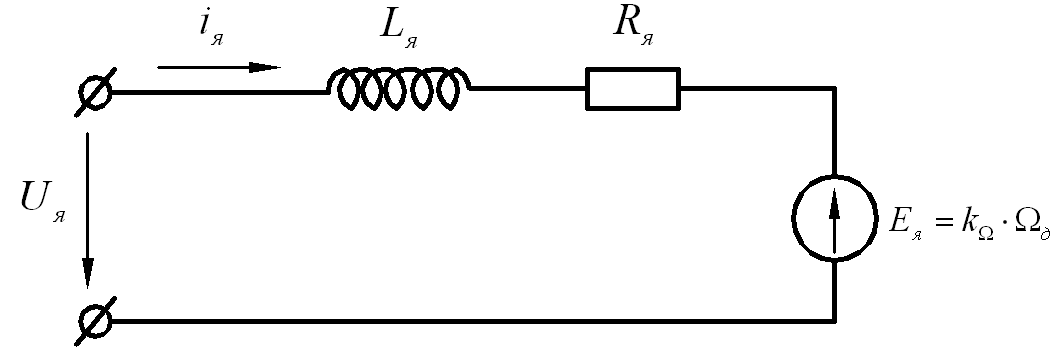
Запишем уравнения, согласно схеме замещения:
 (1.1),
(1.1), (1.2),
(1.2),где
 (1.3),
(1.3),  (1.4).
(1.4).Uя – напряжение якоря,
Iя – ток якоря,
Lя – индуктивность якоря,
Rя – активное сопротивление якоря,
J’ – суммарный момент инерции, приведенный к валу двигателя,
Мд – момент, развиваемый двигателем,
Мвд – момент возмущения, приведенный к валу двигателя,
 - скорость вращения ротора двигателя,
- скорость вращения ротора двигателя,Ея – противо-ЭДС,
 - коэффициент противо-ЭДС (конструктивная постоянная двигателя),kм – конструктивная постоянная двигателя.
- коэффициент противо-ЭДС (конструктивная постоянная двигателя),kм – конструктивная постоянная двигателя. Рассмотрим уравнения (1) – (4).

 (1.5).
(1.5). ,
, ,
,
 .
.Обозначим:
 - постоянная времени нарастания тока якоря (из-за наличия Lя) (1.6),
- постоянная времени нарастания тока якоря (из-за наличия Lя) (1.6), - постоянная времени нарастания скорости ИД. (1.7).
- постоянная времени нарастания скорости ИД. (1.7).Подставив данные обозначения получим:
 ,
, (1.8),
(1.8),Примем:
 (1.9).
(1.9).Рассчитаем значение Тэ и Тэм:
 (1.10)
(1.10) (1.11)
(1.11)Запишем уравнение (1.9) в виде:
 (1.12),
(1.12),где
 (1.13)
(1.13) (1.14).
(1.14).Тогда передаточная функция неизменяемой части имеет вид:

Построение желаемой ЛАЧХ
В соответствии с методикой, выбираем желаемую обратную ЛАЧХ
 второго типа. При этом для коррекции ЭСП используются обратные связи по скорости и моменту ИД, а также последовательное корректирующее устройство. Для упрощения реализации применяем общее корректирующее устройство во всех цепях обратных связей. В этом случае передаточная функция скорректированного разомкнутого СП будет иметь вид:
второго типа. При этом для коррекции ЭСП используются обратные связи по скорости и моменту ИД, а также последовательное корректирующее устройство. Для упрощения реализации применяем общее корректирующее устройство во всех цепях обратных связей. В этом случае передаточная функция скорректированного разомкнутого СП будет иметь вид: (2.1),
(2.1),где μ – коэффициент усиления разомкнутой системы;
υ – коэффициент усиления разомкнутого внутреннего контура связи по скорости при К(s)≡1;
r – коэффициент усиления разомкнутого внутреннего контура связи по моменту при К(s)≡1
Нахождение координат рабочей точки
Определим координаты т. Вр исходя из требований по точности системы.
Находим рабочую частоту:
 с-1
с-1 Определяем амплитуду гармонической составляющей управляющего воздействия:
 град
градПримем амплитуду гармонической составляющей ошибки равной 70% от заданной максимальной ошибки. Тогда:
 град.
град.При этом ордината рабочей точки равна:
 .
.Таким образом, координаты рабочей точки Aр будут иметь значения:
 ;
;  рад/с.
рад/с.Построение желаемой ЛАЧХ
Передаточная функция неизменяемой части имеет вид:
 (1.1)
(1.1)Исходя из найденных значений координат рабочей точки, строим
 . По построенному графику определяем значение коэффициента усиления разомкнутой системы:
. По построенному графику определяем значение коэффициента усиления разомкнутой системы: с-1
с-1 Из т. Ар проводим прямую с наклоном +40 дБ/дек до уровня – 13 дБ. Из полученной точки проводим прямую с наклоном +20 дБ/дек до пересечения с графиком
. Так как высокочастотная и низкочастотная асимптоты построенной желаемой ЛАЧХ и ЛАЧХ неизменяемой части совпадают, то мы получили желаемую ЛАЧХ.Частота среза системы, исходя из графика, равна:
 с-1
с-1Пересечение
и  произошло в точке B, значение амплитуды в которой равно 16 дБ. Таким образом, система удовлетворяет требованиям по устойчивости, и в введении последовательного корректирующего устройства нет необходимости:
произошло в точке B, значение амплитуды в которой равно 16 дБ. Таким образом, система удовлетворяет требованиям по устойчивости, и в введении последовательного корректирующего устройства нет необходимости:
Желаемая ЛАЧХ выделена на графике штриховкой.
Частоты характерных точек построенной желаемой ЛАЧХ:
 с-1
с-1  с-1
с-1Расчет параллельного корректирующего устройства
В общем виде обратную передаточную функцию системы можно представить в виде:
 . (2.1`)
. (2.1`)Второе слагаемое характеризует
 . Запишем передаточную функцию, применив к ЛАЧХ, изображенной на графике, принцип сопоставления. Получим:
. Запишем передаточную функцию, применив к ЛАЧХ, изображенной на графике, принцип сопоставления. Получим: ; (2.2)
; (2.2)С целью упрощения реализации параллельного корректирующего устройства и улучшения параметров устойчивости проведем ЛАЧХ
 начиная с точки В под наклоном +40 дБ/дек. В этом случае имеем:
начиная с точки В под наклоном +40 дБ/дек. В этом случае имеем: ; (2.3)
; (2.3)Из графика 1.1, найдем коэффициент усиления b:
 c2; (2.4)
c2; (2.4)Потребуем, чтобы:
 ; (2.5)
; (2.5)Тогда:
 ; (2.6)
; (2.6)Исходя из (2.3), с учетом (2.4) получаем:
 ; (2.7)
; (2.7)Потребуем, чтобы:
 ; (2.8)
; (2.8)Откуда:
 ; (2.9)
; (2.9)Подставим значения 2.4, 2.2 и 2.5 в формулу 2.9:
 ; (2.9’)
; (2.9’)Подставим в формулу 2.6 значения 2.9’ и 2.6:
 с (2.6’)
с (2.6’)Итак, передаточная функция параллельного корректирующего устройства имеет вид:
 , (2.10)
, (2.10)где
 с. (2.11)
с. (2.11)Техническая реализация параллельного корректирующего устройства
Реализовывать корректирующее устройство будем посредством простейшей RC-цепочки.
Для
 вида 2.10 такая RC-цепочка имеет вид:
вида 2.10 такая RC-цепочка имеет вид: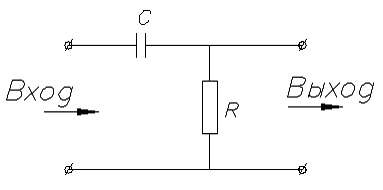
 ; (3.1)
; (3.1)Примем C = 50 мкФ, тогда на основании формулы 3.1:
 КОм. (3.2)
КОм. (3.2)Проверка устойчивости внутреннего контура
Определим запас устойчивости внутреннего контура:
 ; (4.1)
; (4.1)В соответствии с формулой 1.1 имеем:
 (4.2)
(4.2)В соответствии с формулой 2.3 имеем:
 (4.3)
(4.3)Подставим значения 4.2 и 4.3 в уравнение 4.1:
 ; (4.1’)
; (4.1’)Запас устойчивости внутреннего контура больше 300, что благоприятно сказывается на устойчивости системы.
Проверка устойчивости всей системы
Определим запас устойчивости всей системы:
 (5.1)
(5.1)Пользуясь желаемой ЛАЧХ, найдем
 :
: ; (5.2)
; (5.2)Подставим значение 5.2 в формулу 5.1:
 ; (5.3)
; (5.3)Запас устойчивости всей системы удовлетворяет требованиям по устойчивости.
Литература
- Следящие приводы, том 1 / Под ред. Чемоданова Б.К. М.: Издательство МГТУ им. Н.Э.Баумана, 1999. 903 c.
- Следящие приводы, том 2 / Под ред. Чемоданова Б.К. М.: Издательство МГТУ им. Н.Э.Баумана, 2003. 878 с.