
Совершенствование электрогидравлического регулятора мощности дуговой печи постоянного тока
| Вид материала | Автореферат |
- Преобразователь измерительный активной мощности трехфазного тока эп8508, 237.92kb.
- Лекция №11 измерение мощности, 338.91kb.
- Лекции и практические занятия, курсовая работа, 13.54kb.
- Методическое пособие к лабораторной работе. Определение горизонтальной составляющей, 93.64kb.
- Распределительные устройства и подстанции глава 1 распределительные устройства напряжением, 1894.23kb.
- Распределительные устройства и подстанции глава 1 распределительные устройства напряжением, 1787.75kb.
- Терминология Глухозаземленная нейтраль, 249.33kb.
- Лабораторная работа n 4 «Исследование тахогенератора постоянного тока», 54.85kb.
- Описание регулятора напряжения рр363 автомобильного генератора, 155.91kb.
- Разработка урока по физике по теме Электрическая лампа накаливания и электронагревательные, 105.5kb.
На правах рукописи
ЕЛИЗАРОВ КОНСТАНТИН АЛЕКСАНДРОВИЧ
СОВЕРШЕНСТВОВАНИЕ ЭЛЕКТРОГИДРАВЛИЧЕСКОГО РЕГУЛЯТОРА МОЩНОСТИ ДУГОВОЙ ПЕЧИ постоянного тока
Специальность 05.09.10 – Электротехнология
АВТОРЕФЕРАТ
диссертации на соискание ученой степени
кандидата технических наук
Москва, 2010
Работа выполнена в ГОУВПО «Московский энергетический институт (технический университет)» на кафедре «Физики электротехнических материалов и компонентов и автоматизации электротехнологических комплексов»
Научный руководитель доктор технических наук, профессор
Рубцов Виктор Петрович
Официальные оппоненты доктор технических наук, профессор
Макаров Анатолий Николаевич
кандидат технических наук, доцент
Анчарова Татьяна Валентиновна
Ведущая организация: Федеральное государственное образовательное учреждение высшего профессионального образования “Национальный исследовательский технологический университет «МИСиС», г. Москва
Защита диссертации состоится 19 марта 2010 г. в аудитории М-611 в 14 часов на заседании диссертационного совета Д 212.157.02 при Московском энергетическом институте (техническом университете) по адресу: 111250, Москва, ул. Красноказарменная, д. 14
Отзывы на автореферат в двух экземплярах, заверенных печатью, просим направить по адресу: 111250, Москва, ул. Красноказарменная, д.14, Ученый Совет МЭИ (ТУ)
С диссертацией можно ознакомиться в библиотеке ГОУВПО МЭИ (ТУ)
Автореферат разослан «____» _______ 2010 г.
Ученый секретарь
диссертационного совета
кандидат технических наук, профессор Цырук С.А.
Общая характеристика работы
Актуальность проблемы. В настоящее время все большее распространение получают дуговые печи (ДП) с электрогидравлическим регулятором мощности. Однако разнообразие технологических режимов работы ДП и разнообразие применяемого электрооборудования не позволяют сегодня сформулировать единые подходы, позволяющие проводить проектирование систем управления ДП, которое возможно только при использовании моделей, адекватно отражающих процессы, происходящие в печи. При синтезе и настройке систем управления (СУ) регулятором мощности руководствуются в основном упрощенным представлением печи, как объекта управления, что, как правило, приводит к большим погрешностям при выборе параметров оборудования, соответственно, к удорожанию всего комплекса и снижению производительности ДП. Отсутствие точных моделей регуляторов мощности требует проведения длительных и дорогостоящих исследований при наладке и настройке СУ. Кроме того, характерной особенностью настоящего периода в РФ является использование в литейном производстве оборудования с высокой степенью изношенности. По причинам финансового характера полная замена ДП на таких производствах невозможна. Решают проблему путем частичной модернизации оборудования ДП, что еще больше усложняет задачу настройки СУ.
Технологический процесс плавки в ДП предполагает необходимость осуществления автоматического зажигания дуги на различных стадиях процесса плавки: первичном включении печи, обрыве дуги, ликвидации технологических коротких замыканий, возникающих при обвале шихты, и т.д. Точность и быстродействие системы управления дуговой плавильной печью определяют её производительность и энергетическую эффективность, определяемую расходом электроэнергии на тонну выплавленного металла.
На основании вышеизложенного задача совершенствования электрогидравлического регулятора мощности дуговой печи является актуальной.
Цель диссертационной работы: - разработка усовершенствованного электрогидравлического регулятора мощности и системы управления процессом плавки в дуговой печи, обеспечивающих повышение эффективности электрических и технологических режимов плавки и приводящих к снижению стоимости конечной продукции.
Для достижения указанной цели в работе были поставлены и решены следующие задачи:
- Анализ особенностей технологического процесса плавки металла в дуговой печи, режимов работы электрооборудования и механизмов, уровня и тенденций развития систем управления и приводов перемещения электродов, конструктивных и компоновочных решений печей.
- Разработка уточненных моделей электрогидравлического привода перемещения электрода и регулятора мощности дуговой печи.
- Экспериментальное исследование гидравлической и механической систем действующих ДП с целью уточнения параметров модели.
- Разработка методики и аппаратных средств для экспериментального исследования регуляторов мощности дуговых печей.
- Исследование процессов зажигания дуги с целью выявления влияния параметров регулятора мощности ДП на качество и точность регулирования.
- Исследование влияния периодических возмущений для выявления возможных резонансных областей в регуляторе дуговой печи.
- Реализация системы и разработка алгоритмов управления режимами печи, обеспечивающих повышение энергетической эффективности процесса плавки, увеличение производительности печи, обеспечивающие снижение стоимости конечной продукции.
Обоснованность и достоверность научных результатов подтверждается корректностью принимаемых допущений, обоснованностью принятых методов исследований и совпадением теоретических и экспериментальных данных, полученных на действующей установке.
Научная новизна работы заключается в следующих положениях:
- на основании экспериментальных исследований на действующей печи разработана уточненная модель гидропривода, учитывающая нелинейности и запаздывания в электрическом, механическом и гидравлическом каналах;
- выявлена целесообразность перехода от разомкнутого по скорости гидропривода к замкнутому, обеспечивающему повышение быстродействия регулятора мощности, и возможность работы регулятора мощности при малых скоростях перемещения электрода;
- разработана методика экспериментального исследования гидропривода перемещения электрода на действующей печи, пригодная для уточнения математической модели привода и его параметров;
- установлены зависимости, определяющие влияние на устойчивость работы регулятора мощности параметров ПИД-регулятора, скорости перемещения электрода и инерционности датчика обратной связи;
- определены зависимости, устанавливающие влияние параметров регулятора мощности на качество переходных процессов в режиме зажигания дуги;
- на основании анализа влияния периодических возмущений в канале обратной связи доказана устойчивость работы регулятора во всем диапазоне реально возникающих в печи возмущений с угловой частотой от 0,6≤ В ≤ 31,5 рад/c (0,1≤ f≤5 Гц) .
Практическая ценность результатов работы заключается в следующем:
- разработана модель привода и регулятора мощности в среде Simulink, позволяющая проводить анализ и синтез в диалоговом режиме;
- разработана структура гидропривода с обратной связью по скорости, обеспечивающая повышение быстродействия регулятора и предложена реализация датчика обратной связи по скорости;
- предложена структура адаптивного гидропривода регулятора мощности дуговой печи, обеспечивающая независимость показателей качества переходных процессов при изменении задания скорости;
- разработаны алгоритмы управления регулятором мощности дуговой печи для системы комплексного управления процессом плавки;
- разработана методика определения параметров дуговой печи, гидропривода и регулятора мощности для проектируемой и эксплуатируемой печи;
- даны рекомендации по ограничению скорости перемещения электрода из условия устойчивой работы;
- результаты исследований используются в учебном процессе на кафедре ФЭМАЭК МЭИ (ТУ).
Достоверность полученных результатов. Степень достоверности полученных результатов определяется: использованием современных калиброванных измерительных приборов, созданием модели, опирающейся на общепринятые представления в области электротехнологии, хорошим совпадением экспериментальных и расчетных данных.
Апробация работы. Результаты работы доложены на 54-м международном научном коллоквиуме «Информационная технология и электротехника – устройства и системы, материалы и технологии для будущего» в г. Ильменау, Германия в 2009 г.; XII международной конференции «Электромеханика, электротехнологии, электрические материалы и компоненты» в 2007 г.; 14-й и 15-й международных научно-технических конференциях студентов и аспирантов «Радиоэлектроника, электротехника и энергетика» в 2008– 2009 гг.; 6-й и 7-й международных научно-практических интернет-конференциях «Энерго- и ресурсосбережение – XXI век» в 2008 – 2009 гг., 4-ой научно-технической конференции с международным участием «Электротехника, электромеханика и электротехнологии – ЭЭЭ-2009» в г. Новосибирске в 2009 г., семинарах кафедры ФЭМАЭК.
Публикации. По теме диссертации опубликовано 12 печатных работ, в том числе 3 – в изданиях, рекомендованных ВАК РФ для публикации основных результатов диссертаций на соискание ученых степеней доктора и кандидата наук, и 1 патент на полезную модель.
Реализация результатов работы: результаты диссертационной работы внедрены и использованы в ООО «НПФ КОМТЕРМ», г. Москва при разработке дуговой печи ДПС-12 для литейного завода ООО «ВКМ-Сталь», г. Саранск и модернизации печи ДСП-25 литейного производства ООО «Промтрактор-Промлит», г. Чебоксары, где в результате внедрения получено 5 % сокращение расхода электроэнергии на плавку и 10% сокращение длительности плавки.
Структура и объем диссертации. Диссертация состоит из введения, четырех глав, заключения и приложений. Основной текст диссертации изложен на 122 страницах, работа сопровождается 2 таблицами, 64 рисунками и приложением на 8 страницах, список литературы включает 99 наименований.
Содержание работы
Во введении дана общая характеристика работы, обоснована актуальность темы, сформулированы цель и задачи исследований, научно-практическая значимость полученных результатов и основные положения, выносимые на защиту.
В первой главе проводится анализ тенденций развития дуговых печей, систем управления и приводов перемещения электродов. Рассматриваются особенности технологического процесса плавки в ДП.
Показано, что, несмотря на то, что современные ДП все чаше оснащаются электрогидравлическим регулятором мощности, имеющим большее быстродействие по сравнению с электромеханическим приводом, вопросы проектирования систем управления ДП, удовлетворяющих технологическим требованиям, нельзя считать в полной мере решенными. Эти проблемы приобретают остроту особенно в настоящее время в связи с широким использованием для целей управления компьютерной микропроцессорной техники. Показано, что решение задач повышения эффективности работы печи возможно только при совершенствовании электрогидравлического привода перемещения электродов и разработке алгоритмов управления, учитывающих нелинейности его характеристик.
Вторая глава посвящена разработке на основе экспериментальных данных уточненной модели гидравлического привода перемещения электродов дуговой печи, отличающейся от традиционно используемой модели более полным учетом всех имеющихся нелинейностей и запаздываний.
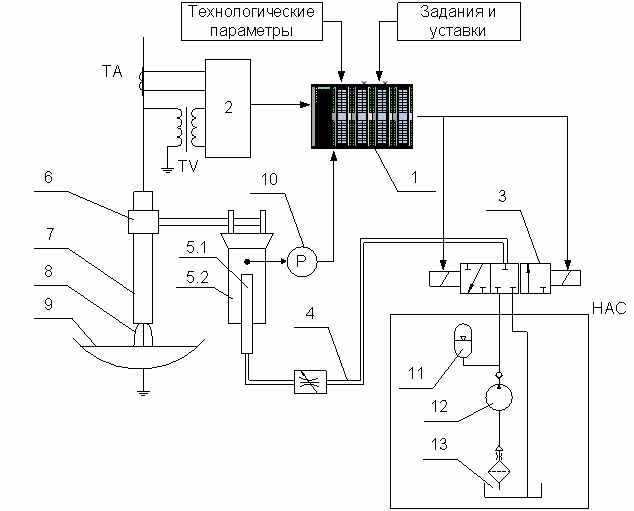
Современный электрогидравлический регулятор мощности дуговой печи выполняется по функциональной схеме, приведенной на рис. 1. В отличие от действующих устаревших гидравлических приводов новые приводы используют более высокие давления в гидросистеме, в них применяются вычислительные устройства и усовершенствованные гидрораспределители, а производительность насосных установок зачастую регулируется. Очевидно, что введенные усовершенствования привода оказывают существенное влияние на характеристики регулятора мощности. Проведенный анализ существующих моделей электрогидравлического привода перемещения электродов дуговой печи показал, что они являются грубыми и не могут быть использованы для анализа и синтеза систем управления, так как это приводит к расхождению расчетных и экспериментальных характеристик как по качественным, так и по количественным показателям. Обеспечить желаемые показатели регулирования можно только путем настройки регулятора на основе уточненной модели. Учитывая, что гидропривод является существенно нелинейной системой, а параметры его элементов практически не поддаются аналитическому определению, в работе для получения уточненной модели был использован экспериментальный метод. Исследование привода проводилось по разработанной методике на действующих промышленных печах литейного класса емкостью до 25 тонн. В процессе эксперимента снимались переходные функции перемещения электродов в режимах подъема и опускания электрода, а также динамические характеристики гидравлического оборудования печи посредством измерения давления в гидроплунжере. По результатам экспериментальных исследований была получена передаточная функция гидропривода, имеющая вид:
| | (1) |
Передаточная функция (1) была положена в основу разработанной уточненной структурной схемы гидропривода, модель которой, выполненная в среде Matlab Simulink, приведена на рис.2.
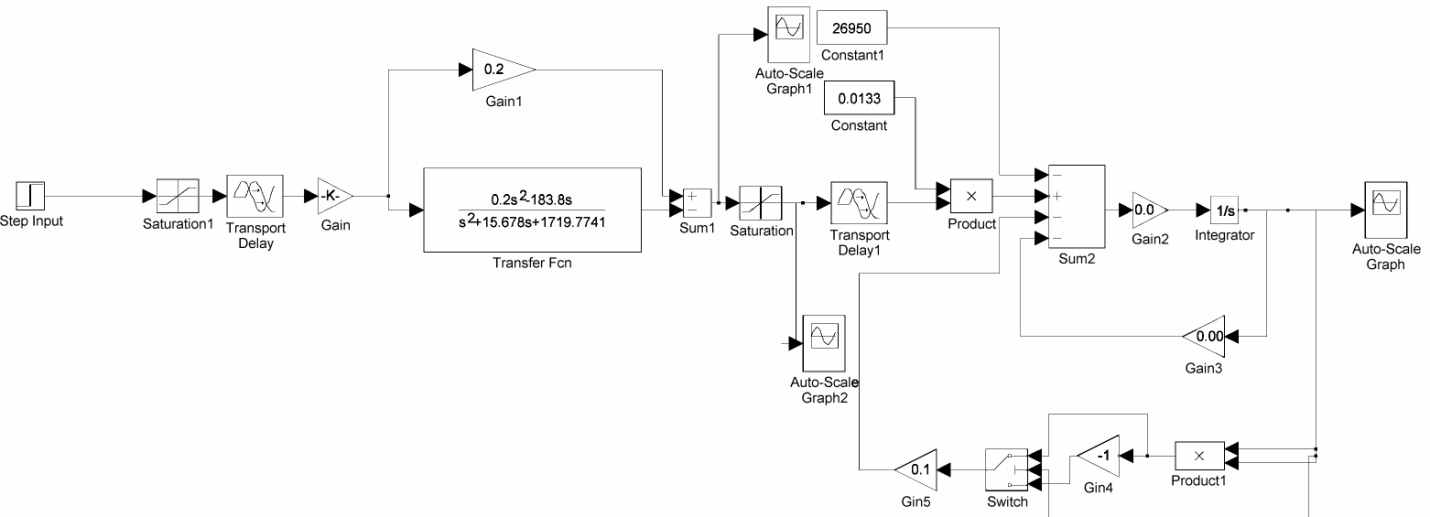
Она учитывает все особенности, присущие гидравлическому приводу перемещения электрода дуговой печи и, в частности, несимметричную характеристику плунжерного гидропривода, когда подъем электрода осуществляется под действием давления жидкости, а опускание электрода под действием его собственного веса.
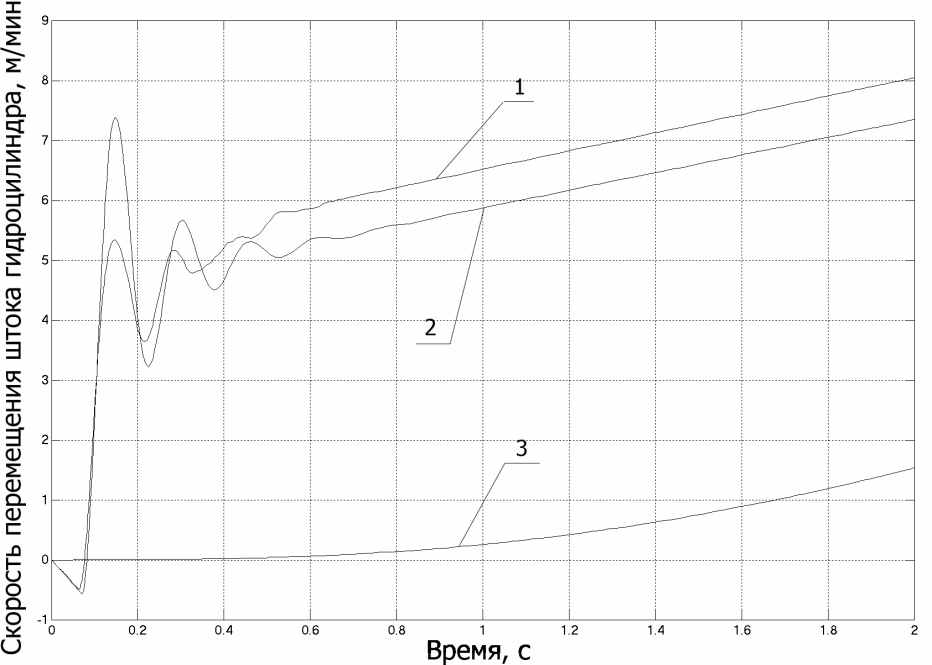
Следует отметить, что рассчитанные на модели переходные функции (кривая 1, рис. 3) с точностью до погрешностей эксперимента совпадают с экспериментальными (кривая 2, рис.3). В них проявляется колебательный характер переходных процессов, который прослеживается в экспериментальных зависимостях и отсутствует в осциллограммах, полученных на традиционной модели (кривая 3, рис.3). Уточненная модель позволяет более точно отразить характер переходных процессов изменения скорости перемещения плунжера особенно в начале движения. Это особенно важно для ДП, в которых на начальной стадии плавления возникает большое число эксплуатационных коротких замыканий, обуславливающих частые перемещения электрода.
Привод, используемый в новых электрогидравлических регуляторах перемещения электрода дуговой печи является разомкнутым по скорости, что обусловлено трудностями выделения точного сигнала обратной связи, пропорционального линейной скорости перемещения электрода. Отсутствие обратной связи по скорости в электрогидравлическом приводе ухудшает его быстродействие и точность регулирования.
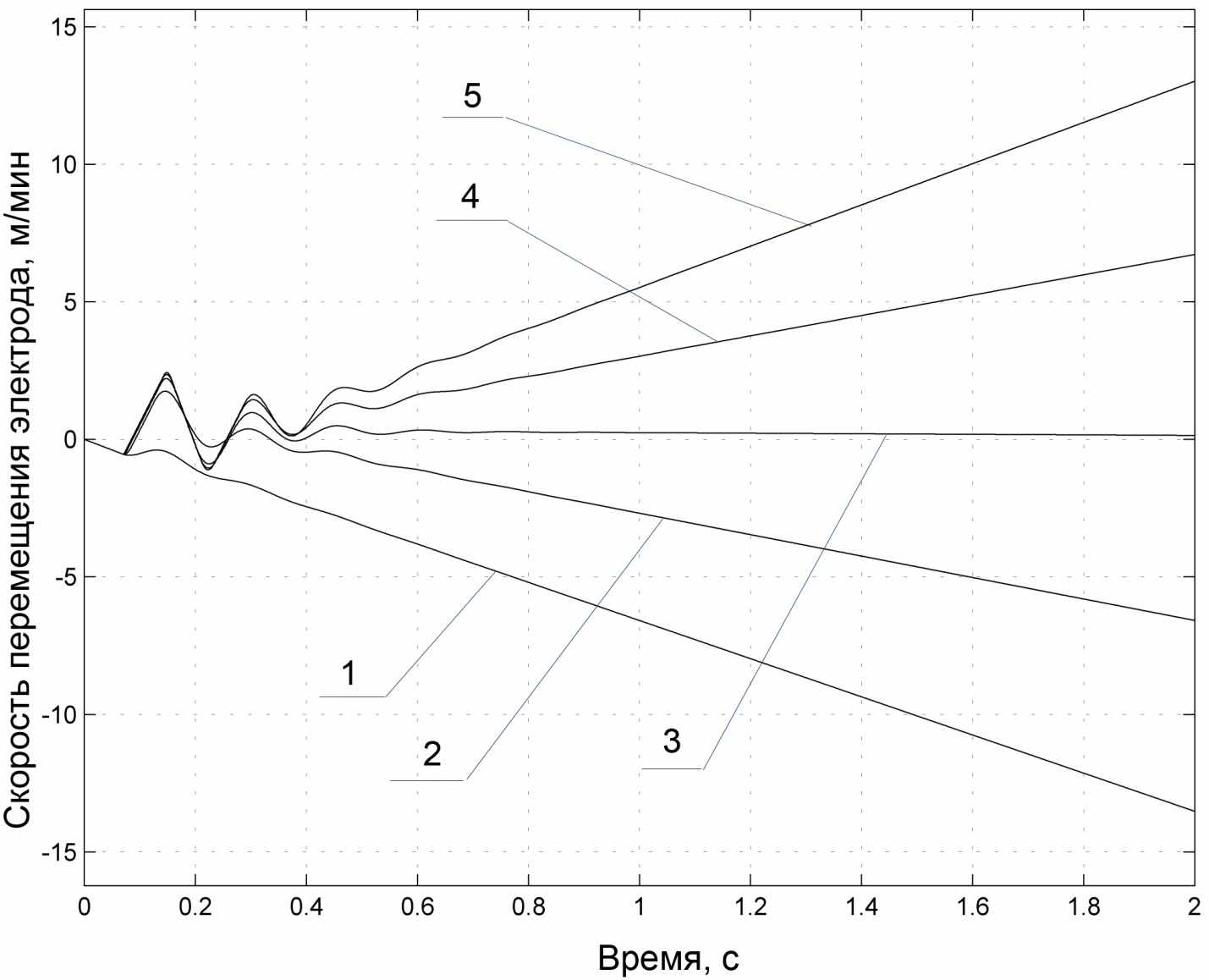
На рис.4 показаны переходные характеристики разомкнутого привода. Кривая 1 показывает изменение скорости движения при задании 0,5 м/мин, кривая 2 – 2,5 м/мин, кривая 3 – 5 м/мин, кривая 4 – 7,5 м/мин, кривая 5 – 10 м/мин. Характерной особенностью системы является невозможность поддержания скорости в особенности при малых заданиях, а так же сильная зависимость скорости, ускорения и усилия гидродвигателя от величины задания.
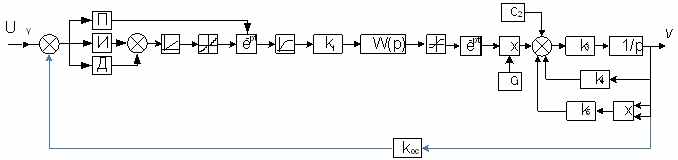
Для улучшения показателей электрогидропривода перемещения электродов было предложено ввести в его структуру отрицательную обратную связь по скорости и последовательную коррекцию на основе ПИД-регулятора (рис.5). Следует отметить, что это мероприятие позволило улучшить показатели качества регулирования. В частности повысилось быстродействие привода, определяемое временем t п первого достижения заданной скорости. Сравнение переходных функций, рассчитанных при одинаковых параметрах, для разомкнутого и замкнутого по скорости привода с ПИД-регулятором показывает, что быстродействие замкнутого привода увеличивается в 6 раз (уменьшается время первого достижения заданной скорости). Выявлено, что дифференциальная (Д) составляющая ПИД-регулятора не вносит заметного влияния в качество переходных процессов, поэтому в работе предложено использовать ПИ-регулятор.
Как и ожидалось, система, замкнутая по скорости, критична к настройке ПИ-регулятора. Дальнейшее исследование замкнутого привода показало, что необходимо изменять параметры ПИ-регулятора для получения желаемого характера переходных процессов при изменении задания скорости vз, что позволяет получить переходный процесс, близкий к желаемому при изменении задания скорости в реализуемом диапазоне 0,2< vз<10,0. Полученные зависимости k1(vз ), k2(vз ) приведены на рис.6. С их помощью была составлена структурная схема и получена схема модели адаптивного электрогидравлического привода перемещения электродов, изображенная на рис.7.
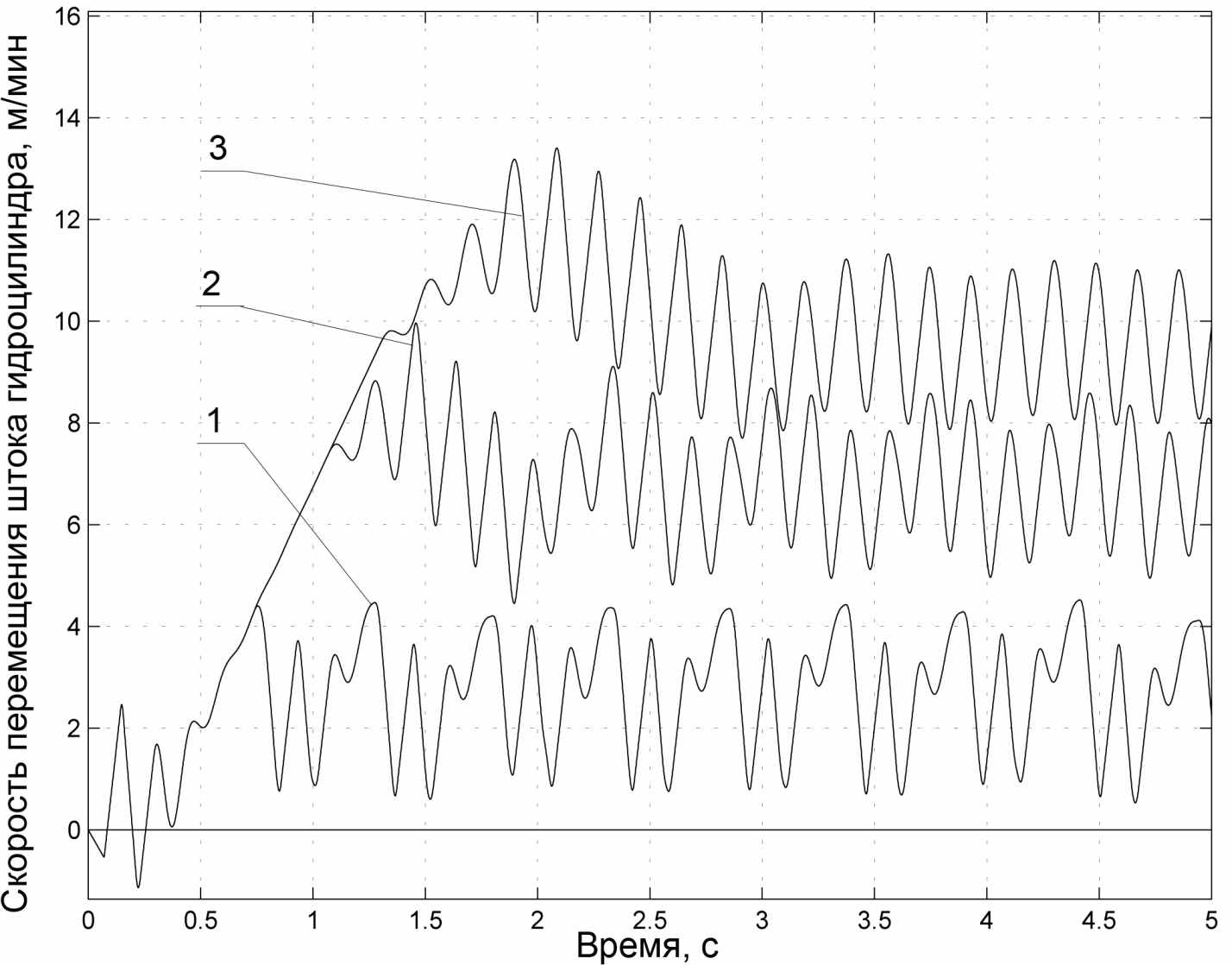
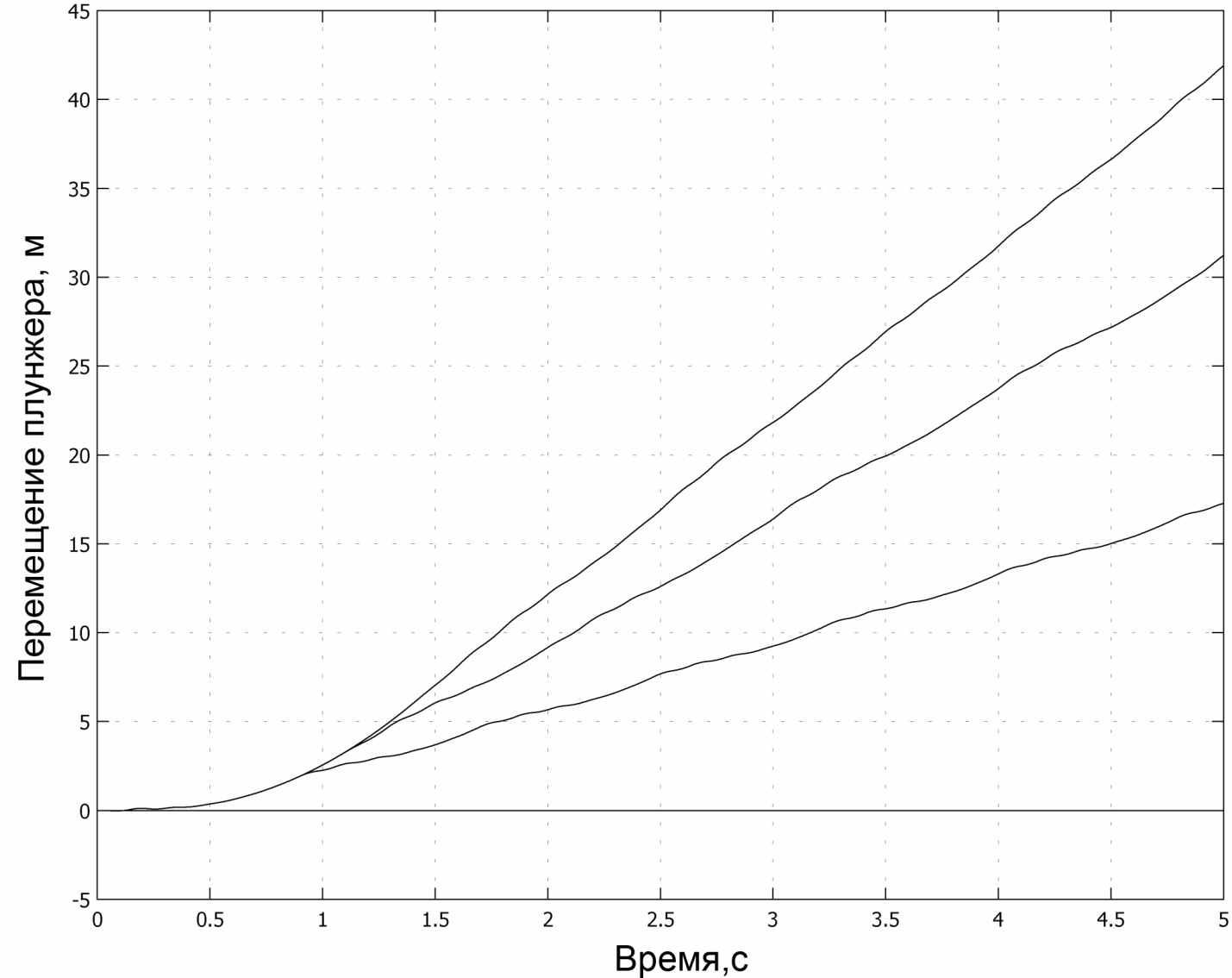
На данной модели были сняты переходные функции скорости и перемещения штока гидроцилиндра при разных заданиях. На рис. 8 изображены осциллограммы переходных функций скорости и перемещения гидроплунжера при пуске электрогидропривода при следующих заданиях: кривая 1 – задание 2,5 м/мин, кривая 2 – 7,5 м/мин, кривая 3 – 10 м/мин. Как следует из представленных осциллограмм, введение адаптации позволяет получить переходной процесс, близкий к желаемому, расширить границы работы привода, улучшить его скоростные характеристики, а так же обеспечить работу в области малых заданий скоростей. Колебательный характер переходных процессов по скорости гидравлического плунжера практически не вносит искажений в регулятор мощности, поскольку он не проявляется в переходных характеристиках перемещения, поэтому переходные процессы можно считать удовлетворительными. Обратная связь по скорости и адаптация повышают быстродействие электрогидравлического привода , а вид переходных процессов становится инвариантен к заданию. Введение адаптивного регулятора позволяет приблизить исходную нелинейную систему к линейной.
Третья глава посвящена синтезу и исследованию регулятора мощности ДП. Рассмотрено влияние инерционности датчиков обратной связи на показатели качества системы. Определены области допустимых значений параметров регулятора, обеспечивающих его устойчивую работу. Рассмотрена работа регулятора при наличии в системе периодических возмущений в канале обратной связи.
Модель механической системы стойки и электрододержателя разработана на основе экспериментальных данных, полученных на действующей установке. В процессе эксперимента измерялись ускорения при колебаниях электрододержателя в различных режимах. На основе этих данных получена передаточная функция тракта перемещения электрода в следующем виде:
| | (2) |
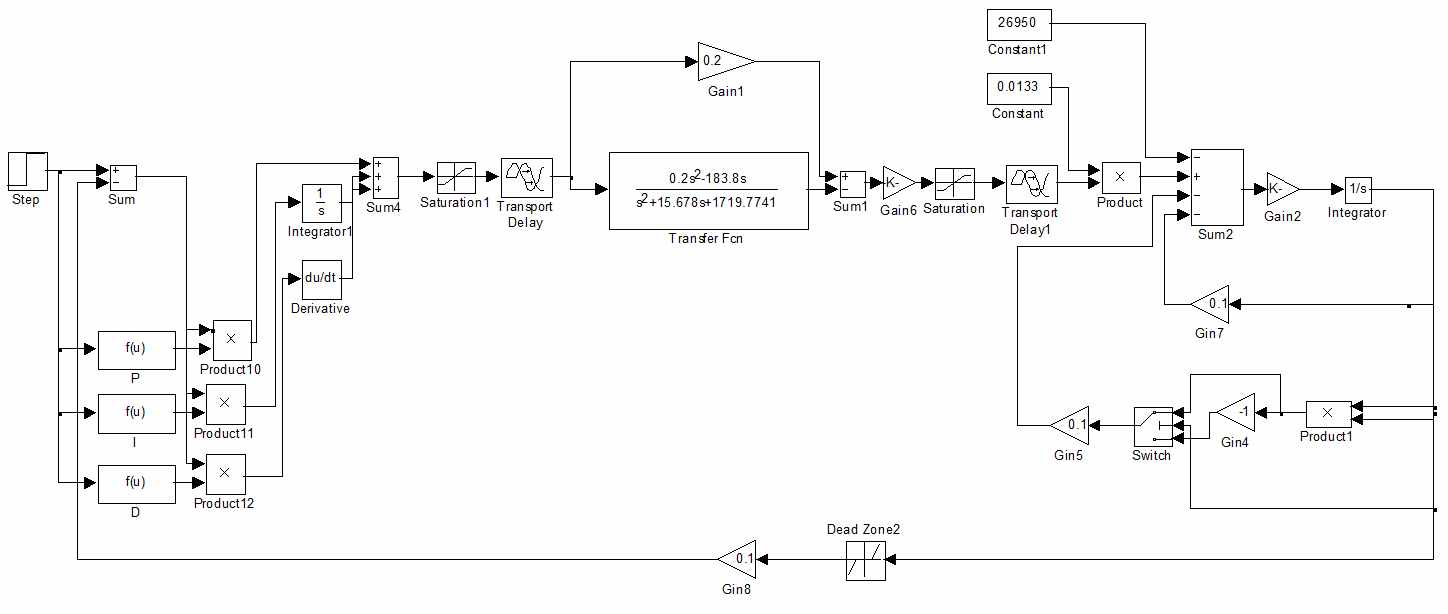
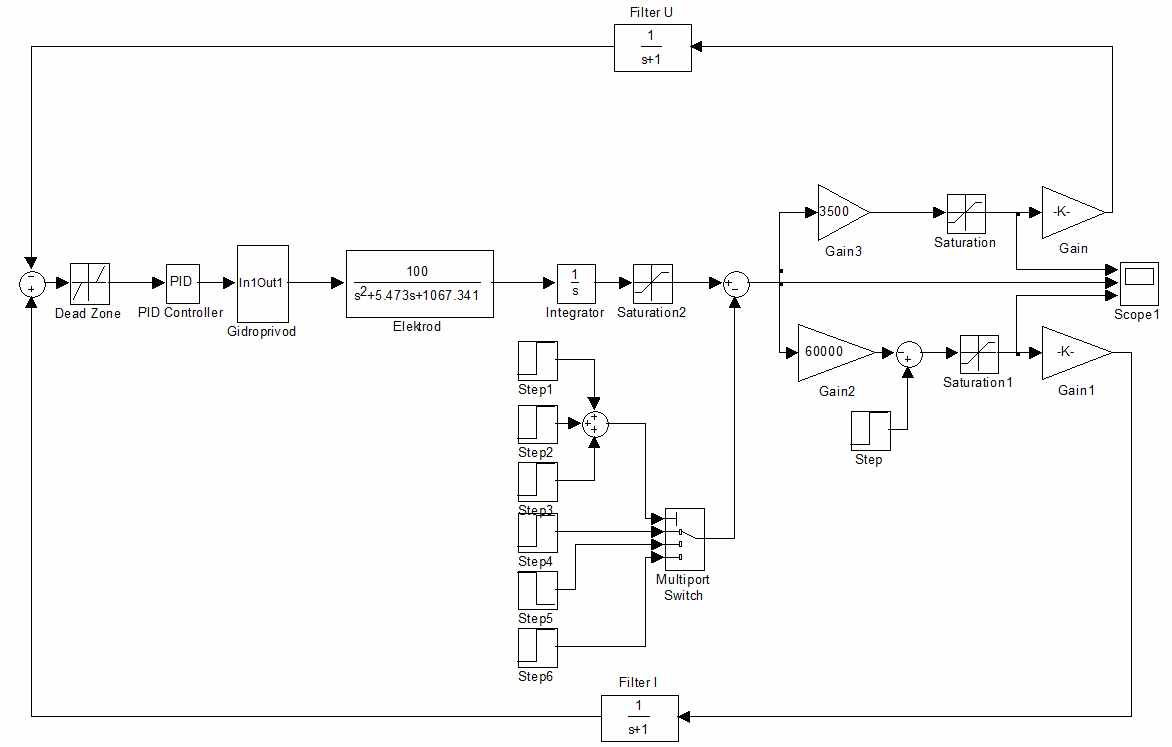
Она была положена в основу структурной схемы электрогидравлического регулятора мощности, схема которой в пакете Matlab Simulink, изображена на рис.9. Данная схема отражает все основные особенности регулятора мощности с учетом допущений, принятых при разработке модели.
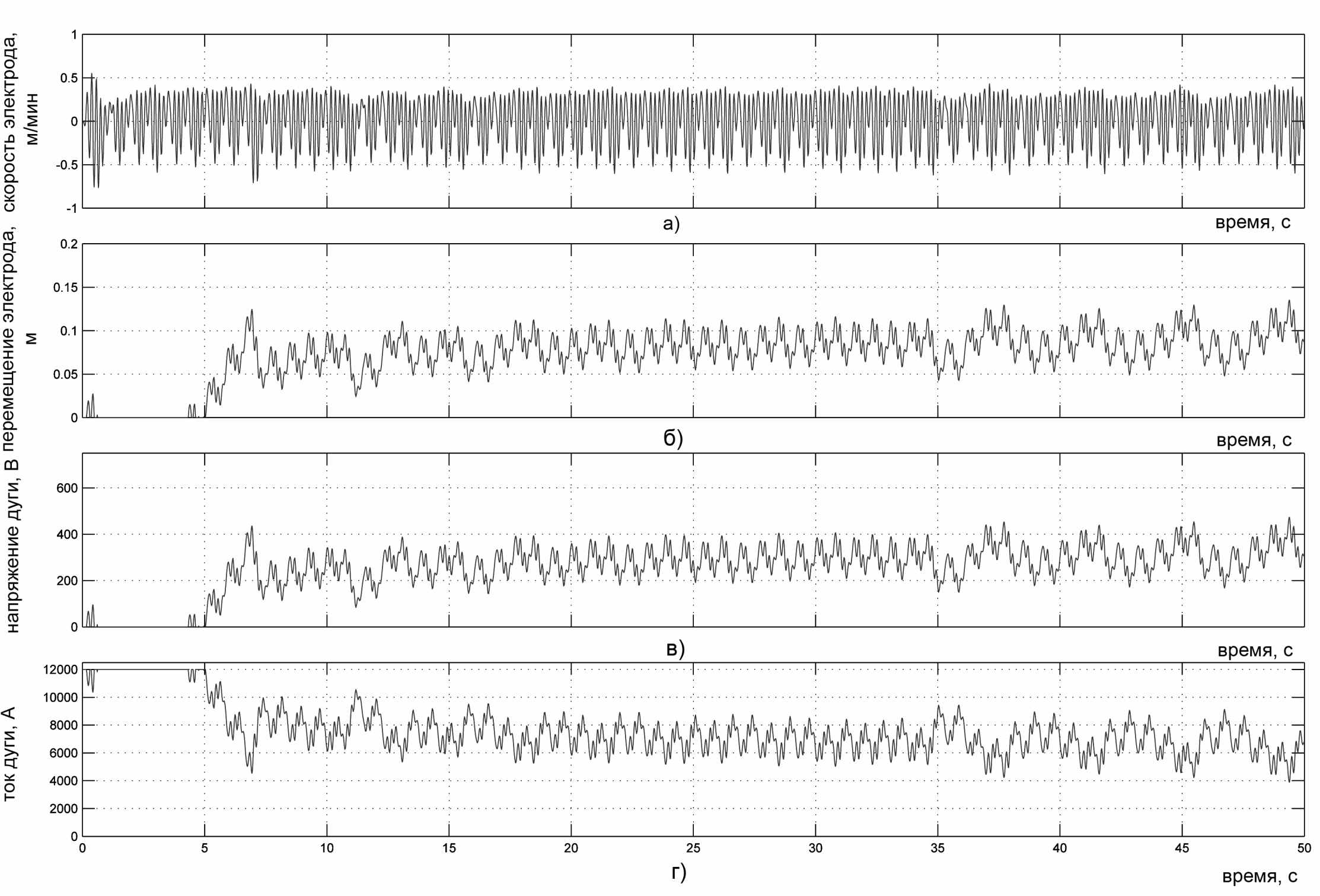
Для определения влияния параметров системы были проведены исследования на модели рис.9 применительно к режиму зажигания дуги. Исследования проводились путем расчета переходных функций тока дуги, напряжения на дуге, перемещения и скорости электрода. Целью исследований являлось определение зоны нечувствительности, настройки ПИД-регулятора и допустимой скорости перемещения электрода, при которой обеспечивается устойчивая работа системы. Исследования проводились при неизменных параметрах печи, а варьировалась ширина зоны нечувствительности, параметры настройки ПИД-регулятора.
Как показали исследования, фактором, оказывающим наиболее существенное влияние на устойчивость работы регулятора, можно считать скорость перемещения электрода. Не случайно в промышленных регуляторах мощности дуговых печей максимальную скорость перемещения электрода ограничивают на уровне 2-4 м/мин. Проектная скорость перемещения электрода, составляющая 10 м/мин, является завышенной и не обеспечивает устойчивую работу регулятора. Для определения максимально допустимой скорости перемещения электрода из условия устойчивой работы регулятора мощности были проведены исследования его работы в режиме зажигания дуги при варьировании максимальной скорости при ширине зоны нечувствительности 10% и параметрах настройки ПИД-регулятора kП = 1,0; kИ = 0,0; kД = 0,0. Было установлено, что система работает устойчиво при ограничении скорости перемещения электрода величиной 1,5 м/мин. Далее исследовалось влияние настройки ПИД-регулятора. Приемлемое качество регулирования было получено при следующих настройках: kП = 0,3; kИ = 0,0; kД = 0,0 (см. рис. 10). Исходная система имеет завышенный коэффициент передачи kП, поэтому на нее благотворное влияние оказывает его уменьшение, однако уменьшение ниже kП = 0,3 приводит к значительному снижению быстродействия. Исследование показывает, что интегральная и дифференциальная составляющая не вносят положительной динамики в переходной процесс и их использование не целесообразно, поэтому от ПИД-регулятора предложено перейти к П-регулятору. Колебательный характер системы при этом все равно сохраняется, причиной этого является существенная нелинейность полученной модели ДП.
Одним из наиболее важных параметров является постоянная времени фильтра в канале обратной связи, исследования влияния которого на работу системы проводились на модели рис.9 путем расчета переходных процессов технологических параметров Uд(t), Iд(t) и lд(t) для режимов включения печи из режима короткого замыкания. Проведены эксперименты при постоянных времени фильтра, лежащих в диапазоне от 0 с до 10 с. Увеличение постоянной времени фильтра в канале обратной связи приводит к увеличению запаздывания и увеличению перерегулирования, а так же к снижению амплитуды колебаний длины дуги и оказывает влияние на время регулирование. Это позволяет сделать вывод о нецелесообразности ее увеличения (как отмечают некоторые авторы) с целью снижения перерегулирования. Таким образом, для регулятора мощности ДП существует оптимальное значение постоянной времени фильтра, обеспечивающее близкое к оптимальному соотношение показателей качества переходных процессов, таким значением можно считать величину Тф = 1 с, при которой достигается наименьшее время регулирования, приемлемое перерегулирование и запаздывание при сохранении минимальной амплитуды колебаний в установившемся режиме.

В четвертой главе разрабатывается методика экспериментального исследования на действующей дуговых печах литейного класса (емкостью до 25 тонн) механической, гидравлической и электрической частей регулятора мощности, проводится экспериментальное определение вида и параметров элементов, входящих в его состав. Проводятся экспериментальные исследования разработанного регулятора на действующей дуговой печи. Уточняются алгоритмы управления и приводятся рекомендации по проектированию и наладке регулятора мощности дуговой печи, как реализованного на базе современной двухуровневой иерархической системы, включающей в себя промышленный компьютер и программируемый универсальный контроллер (рис.11). В результате внедрения разработанной системы получено 5 % сокращение расхода электроэнергии на плавку и 10% сокращение длительности плавки.
Заключение по работе:
- На основании разработанной уточненной модели электрогидравлического привода предложена и апробирована структура адаптивного электрогидравлического регулятора мощности, обеспечивающего инвариантность показателей качества переходных процессов при изменении скорости.
- Показана целесообразность введения в электрогидравлический привод перемещения электродов отрицательной обратной связи по скорости, позволяющий уменьшить время переходного процесса примерно в 6 раз, что позволило уменьшить длительность плавки примерно на 10% .
- Выявлено существенное влияние скорости перемещения электрода на устойчивость работы системы во всех режимах, которая для класса литейных печей не должна превышать 1,5 – 2 м/мин.
- Установлено существенное влияние постоянной времени фильтров в канале обратной связи на величину перерегулирования, времени регулирования, запаздывания и амплитуду установившихся колебаний перемещения электрода, и показано, что для рассматриваемого класса печей имеет место оптимальное по критерию минимума амплитуды установившихся колебаний и величины запаздывания значение постоянной времени фильтра, составляющее 1 с.
- Установлено отсутствие резонансных явлений в системе регулирования при изменении круговой частоты в диапазоне 0,6≤ В ≤ 31,5 рад/c. Система обладает достаточным внутренним демпфированием, исключающим возникновение резонансных явлений.
- Предложена методика определения параметров регулятора мощности и печи на основе каталожных данных и экспериментов, пригодная для рассматриваемого класса печей и определяющая основные параметры работы регулятора, необходимые для его проектирования.
Основные результаты диссертации опубликованы в следующих работах:
- Елизаров К.А. Экспериментальное исследование электрогидравлического механизма перемещения электродов дуговой сталеплавильной печи//Вестник МЭИ. - 2009. - №3. - С.47-53.
- Елизаров К.А. Экспериментальное определение структуры и параметров электрогидравлического привода перемещения электродов дуговой электропечи //Вестник МЭИ. - 2010. - №1. - С.51-57.
- Елизаров К.А. и др. Малая универсальная электрическая дуговая печь ДП-0,1//Литейщик России. - 2010. - №2. - С.41-44.
- Патент РФ на полезную модель №82400, МПК H05B 7/148, G05B 11/00. Регулятор мощности дуговой сталеплавильной печи // К.А. Елизаров и др. - №2008141995/22; Заявл. 23.10.2008; Опубл. 20.04.2009, Бюл. №11.-1 с.
- Елизаров К.А. Экспериментальное определение параметров электрогидравлического регулятора мощности ДСП//Вести высших учебных заведений Черноземья. - 2009. - №2. - С.32-34.
- Elizarov K. Experimental research of electrohydraulic drive for arc furnaces electrodes transmission system//Proceedings of 54. IWK. Ilmenau. Germany. - 2009. 07-10 September. P. 363-364.
Елизаров К. Экспериментальное исследование электрогидравлического привода для механизма перемещения электродов дуговой печи//Материалы 54-ого научного коллоквиума. - Ильменау. - Германия. - 2009. - 07-10 сентября. - С.363-364.
- Елизаров К.А. Исследование электрогидравлического регулятора дуговой сталеплавильной печи//Радиоэлектроника, электротехника и энергетика. XIV Междунар. науч.-техн. конф. студентов и аспирантов: Тез. докл. В 3-х т. Т.2.-М.: Издательство МЭИ, 2008. - С.144-146.
- Елизаров К.А. Экспериментальное исследование механизма перемещения электродов ДСП//Радиоэлектроника, электротехника и энергетика. XV Междунар. науч.-техн. конф. студентов и аспирантов: Тез. докл. В 3-х т. Т.2.-М.: Издательство МЭИ, 2009. - С.154-156.
- Елизаров К.А. Исследование кинематики гидравлического регулятора мощности дуговой электропечи//Труды XII МКЭЭЭ-2008. Крым. Алушта. 29 сентября-4 октября 2008. – С. 240-242.
- Елизаров К.А. Исследование влияния гидравлического регулятора мощности на энергопотребление дуговой сталеплавильной печи// Энерго- и ресурсосбережение –XXI век: Сб. материалов VI Междунар. научн.-практич. интернет-конференции. – Орел. 2008. - С. 90-91.
- Елизаров К.А. Экспериментальное определение параметров электрогидравлического регулятора мощности ДСП// Энерго- и ресурсосбережение –XXI век: Сб. материалов VII Междунар. научн.-практич. интернет-конференции. – Орел. - 2009. - С. 104-106.
- Елизаров К.А. Экспериментальное исследование электрогидравлического регулятора мощности ДСП//Электротехника, электромеханика и электротехнологии – ЭЭЭ-2009: Материалы четвертой научно-технической конференции с международным участием – Новосибирск: НГТУ. - 2009. – С. 230-235