
Выбор Оптимальных Параметров Настройки регуляторов методические указания
| Вид материала | Методические указания |
СодержаниеНовороссийск – 2011. З, позволяющие отключать сигнал управления регулятора 1 Опредилить показатели качества переходного процесса |
- Задача нахождения оптимальных параметров метода аддитивного расщепления, 51.92kb.
- Пропорциональный или п-регулятор с одним параметром настройки, 81.96kb.
- Методические принципы планирования и проведения занятий воспитателя по развитию речи, 41.83kb.
- Фёдорович Прогноз и выбор оптимальных параметров теплового режима при строительстве,, 488.06kb.
- Удк 621. 309: 621. 362 Определение оптимальных параметров устройств для ограничения, 95.58kb.
- Практическое задание: Настройка ведения учета. Настройки аналитического учета На основании, 175.54kb.
- Алгоритмы и программные средства настройки параметров нечетких моделей на основе гибридных, 296.75kb.
- Общие сведения о мастере настройки сети, 12.23kb.
- Методические указания к электронным лабораторным работам по курсу физической химии, 2388.82kb.
- Демидова Л. А., Коротаев А. Н. Генетический алгоритм настройки параметров системы нечеткого, 38.47kb.
- -
МИНИСТЕРСТВО ТРАНСПОРТА РОССИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ АГЕНТСТВО МОРСКОГО И РЕЧНОГО ТРАНСПОРТА
ФГОУ ВПО«ГОСУДАРСТВЕННАЯ МОРСКАЯ АКАДЕМИЯ
ИМЕНИ АДМИРАЛА Ф.Ф. УШАКОВА»
Кафедра «Эксплуатация судовых механических установок»
Практическое занятие № 6
Настройка систем .Выбор Оптимальных Параметров Настройки регуляторов.
Методические указания к практическому занятию по дисциплине «Основы автоматики и теория устройства технических систем» для курсантов и студентов-заочников специальности 180403 «Эксплуатация судовых силовых установок».
Новороссийск – 2011.
Настоящее методическое указание к практическому занятию по дисциплине «Основы автоматики и теория устройства технических систем» подготовлено преподавателем Нечитайленко К.П., утверждено на заседании кафедры ЭСМУ _ . _______ 2011 года, протокол № ____.
Рецензент :
______________________________________________________
1.Настройка системы для определения ОПН.
Разомкнутая система, по переходной функции которой рассчитывают параметры настройки, образована всей цепочкой звеньев САР, за исключением регулятора. Такое исключение необходимо, ибо отыскивают величины, относящиеся к регулятору.
В большинстве современных САР предусмотрены переключатели З, позволяющие отключать сигнал управления регулятора 1 и управлять сервомотором 4 вручную посредством дистанционного задатчика 2 (рис. 117). Измеритель б фиксирует значение выходной величины, а регистрирующее устройство 7 — синхронно изменения как входной, так и выходной величины объекта регулирования 5 разомкнутой таким образом системы.
Переходные функции разомкнутых САР судовой энергетической установки по форме соответствуют характеристикам объектов, состоящих из нескольких звеньев (см. рис. 70).
Определение настроечных параметров может быть выполнено на основе одной лишь экспериментальной переходной функции, если по ней могут быть определены все локальные элементы, указанные на рис. 66. Однако различные ограничения вводятся соображениями безопасности и стабильности режимов работы установки в целом. В этом случае экспериментально удается получить только начальный участок кривой; неизвестным часто оказывается даже положение точки перегиба. Расчет настроечных параметров в этом втором случае может быть выполнен, если дополнительно известны коэффициенты усиления объекта. Рассмотрим оба варианта отдельно.
Случай, когда переходная функция достигает асимптоты. На рис. 118 показана форма переходной функции и вызвавшего ее возмущения -
Расчет оптимальных параметров настройки автоматического регулятора системы в этом случае подразделяют на следующие этапы.
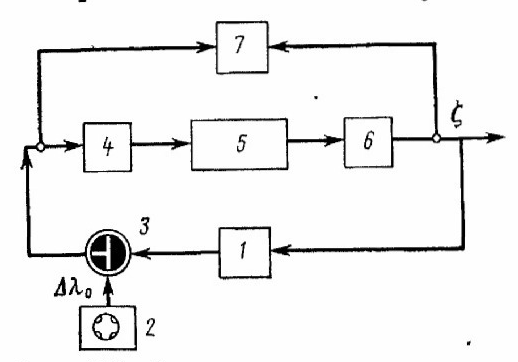 |  |
| Структурная схема разомкнутой САР для получения экспериментальной переходной функции11 переходной функции выражены в секундах | Переходная функция разомкнутой системы, достиющая асимптоты нового установившегося состояния: а- выходная величина ;б – сообщенное возмущение |
2. Порядок расчета ОПН
1. На графике переходной функции определяют точку = О, соответствующую моменту подачи возмущения, и точку перегиба , после чего проводят касательную ab в этой точке и устанавливают величины отрезков
z , U ,S и
 (1)
(1) в масштабе осциллограммы .
2. Значения z и U выражены в секундах или минутах в зависимости от градуировки шкал регулятора, а значение ординаты S пересчитывается в процентах к отклонению
:S%= S*100 /
(2) Величина сообщенного системе возмущения Δ λ% , также выражена в процентах по отношению к полной нагрузке объекта.
З. Определяют отношение, %/мин или %/с,
R = S%/U (3)
выражающее угловой коэффициент наклона касательной к переходной функции в точке перегиба. асимптоты нового установившегося
4. Оптимальные параметры настройки регуляторов рассчитывают ‘по следующим формулам.
Для П- регулятора:
коэффициент усиления Kr или ширина зоны пропорциональности b:
Kr = Δ λ% /(zR) b= (zR)/ Δ λ% (4)
Для ПИ-регулятора:
коэффициент усиления Kr или ширина зоны пропорциональности b:
Kr = Δ λ% /(1.1 zR) b= (110*zR)/ Δ λ% (5)
время интегрирований
Ти= z/ 0.3 (6)
Для ПИД-регулятора:
коэффициент усиления Kr или ширина зоны пропорциональности b:
Kr =1,2*Δλ% /(zR) b= (83*zR)/ Δ λ% (7)
время интегрирования
Ти= 2*z (8)
время дифференцирования
Тд=0.5*z (9)
3. Аппроксимирование одноёмкостным звеном и участком запаздывания.
Если известна переходная функция разомкнутой САР, оптимальные параметры настройки могут быть получены в результате несложных расчетов на основании специально разработанных для этой цели методов. Здесь будет рассмотрен только один из таких методов для случая, когда переходная функция разомкнутой системы аппроксимирована инерционным звеном первого порядка и звеном запаздывания, независимо от того, достигает отклонение асимптоты нового установившегося состояния или нет. В последнем случае коэффициент усиления К0 объекта необходимо определить, используя дополнительные данные о статике. Передаточная функция, полученная в результате такой аппроксимации, имеет вид (10)
W(p) = K0λ exp( - zp) / ( 1+ sT) (10)
где K0λ = y∞ / λ = — коэффициент усиления разомкнутой системы, приведенный к безразмерной форме;
z,Т — запаздывание и постоянная времени экспоненты. .
Рассматриваемый метод позволяет вычислить оптимальные значения параметров применительно к заранее выбранному интегральному критерию качества регулирования. При этом используют соотношения:
KR / K0λ = A (z /T)-B Tи / T = С (z /T)-D Tд / T = E (z /T)-F (11)
в которых постоянные А, В, С, D, Е и F выбирают по таблице в зависимости от закона регулирования и выбранного интегрального критерия,
Таблица
Значения постоянных в формулах (11) для различных критериев качества регулирования
| № п.п | Метод настройки | Тип регулятора | Значения постоянных | |||||
| A | B | C | D | E | F | |||
| 1 | Iао | П | 0.9 | 0.98 | | | | |
| 2 | Iкв | П | 1.4 | 0.92 | | | | |
| 3 | Iаот | П | 0.5 | 1.08 | | | | |
| 4 | Iао | ПИ | 1.0 | 0.99 | 1.6 | 0.71 | | |
| 5 | Iкв | ПИ | 1.3 | 0.96 | 2.0 | 0.74 | | |
| 6 | Iаот | ПИ | 0.9 | 0.98 | 1.5 | 0.68 | | |
| 7 | Iао | ПИД | 1.4 | 0.92 | 1.1 | 0.75 | 0.5 | 1.14 |
| 8 | Iкв | ПИД | 1.5 | 0.94 | 0.9 | 0.77 | 0.6 | 1.01 |
| 9 | Iаот | ПИД | 1.4 | 0.95 | 1.2 | 0.74 | 0.4 | 0.99 |
Следует отметить, что при выборе способа настройки конкретного регулятора необходимо принимать во внимание характерные условия работы, типичные внешние возмущения, особенности динамических свойств объекта регулирования.
Большое влияние на качество процесса регулирования имеет запаздывание. Иллюстрацией этому могут служить осциллограммы переходных процессов, снятых на моделях объектов, относительная величина запаздывания z/Т в которых отличается в 10 раз (рис. 120).
При незначительной величине запаздывания (z/Т== 0,1) выбор типа регулятора (и способа его настройки по тому или иному критерию оптимальности) не вносит существенной разницы в течение переходного процесса, заканчивающегося за десятые доли относительного времени. Однако в том случае, если запаздывание велико, качество переходного процесса резко ухудшается, значительно возрастают как перерегулирование, так и продолжительность переходного процесса.
Когда запаздывание достигает величины z/Т = 1, разница в продолжительности переходного процесса и максимальном отклонении параметра в случае использования ПИД -регулятора превышает соответствующие полные значения при х/Т = 0,1, и преимущества этого типа регулятора перед более простыми по структуре (например, ПИ регуляторами) становятся особенно ощутимыми.
4. Задачи
ЗАДАЧА 1
ОПРЕДИЛИТЬ ПОКАЗАТЕЛИ КАЧЕСТВА ПЕРЕХОДНОГО ПРОЦЕССА
Вариант а):
| Изменение регулируемой величины | 1.0 0.8 0.6 0.4 0.2 0.0 | | |  |  | | | |
| |  |  | | | | | ||
 |  | | | | | | ||
 | | | | | | | ||
| | | | | | | |
0 5 10 15 20 25 30 35
Время, секунды
Вариант б):
| Изменение регулируемой величины | 1.0 0.8 0.6 0  .4 .40.2 0.0 | | | | | | | |
 |  |   | | | | | ||
| | | | | |  | | ||
| | | | | | | | ||
| | | | | | | |
0 5 10 15 20 25 30 35
Время, секунды
Вариант в):
| Изменение регулируемой величины | 1.0 0.8 0.6 0.4 0.2 0.0 | | | | | | | |
 |  |   |  |   | | | ||
| | | | | | | | ||
| | | | | | | | ||
| | | | | | | |
0 5 10 15 20 25 30 35
Время, секунды
| показатели качества | вариант переходной функции | ||
| а | б | в | |
| 1.Время переходного процесса при нечувствительности 5% | | | |
| 2.Перерегулирование | | | |
| 3.Колебательность | | | |
5. Литература
1. Сыромятников В.Ф. «Основы автоматики и комплексная автоматизация судовых пароэнергетических установок». Москва «Транспорт» 1983г
2.Печененко Б.И. ,Козьминых Г.В. «Основы автоматики и комплексная автоматизация судовых пароэнергетических установок» Москва «Транспорт» 1979г.
3.Королев В.И. Лабораторный практикум по автоматике .
Методическое пособие НГМА, г.Новороссийск ,2001 –100 с
4.В.А.Бесекерский,Е.П.Попов, 2003 Теория систем автоматического управления
6. Оглавление
1.Настройка системы для определения ОПН. 3
2. Порядок расчета ОПН 4
3. Аппроксимирование одноёмкостным звеном и участком запаздывания. 5
4. Задачи 7
5. Литература 8.
6. Оглавление 8