
Методы построения радионавигационных полей для информационного обеспечения автоматизированных систем управления движением судов
| Вид материала | Автореферат |
СодержаниеВ четвертом разделе Ртр = 10 – 10 – требуемая вероятность ошибки при приеме цифровой, Р Рис. 7. Натурные измерения: а Основные публикации по теме диссертации |
- Технология построения информационного и математического обеспечения систем автоматизированного, 619.82kb.
- Направление 090305 «Информационная безопасность автоматизированных систем» Информационная, 17.19kb.
- Общая характеристика Актуальность темы исследования, 183.53kb.
- Задачи и структура информационного обеспечения управления Унифицированные системы документации, 10.89kb.
- Территориальное управление Росимущества в Новосибирской области сообщает о продаже, 26.17kb.
- Основы построения автоматизированных систем иерархически-взаимосвязанного управления, 455.78kb.
- Основы построения автоматизированных систем иерархически-взаимосвязанного управления, 455.86kb.
- План занятий третьего года обучения, по специальности «Программное обеспечение вычислительной, 103.35kb.
- Календарно тематический план занятий Предмет: информационные системы в экономике для, 38.5kb.
- Теоретические основы информационной безопасности автоматизированных систем, 26.65kb.
В четвертом разделе разработана методика и исследовано влияние взаимных помех в СВ диапазоне на особенности построения топологии дифференциальных полей.
Для решения поставленной задачи предложена методика анализа наложения полей сигналов и помех в локальных дифференциальных подсистемах ГЛОНАСС, GPS, на основе которой для цепи речных ККС, установленных от ЕЧ ЕГС России от Санкт-Петербурга до Астрахани, найдены зоны наложения дифференциальных полей (рис. 5). В общей сложности найдено 11 зон наложения, причем зоны с номерами 1 – 8 можно классифицировать, как зоны однократного наложения дифференциальных полей, а зоны, обозначенные 9 – 11, относятся к зонам многократного наложения дифференциальных полей.
Рис. 5. Зоны наложения дифференциальных полей ККС цепи ЛДПС.
Для этих условий разработана модель определения зоны действия источника взаимных помех, где напряженность поля, создаваемого передающим устройством, относительно малой мощности источника взаимных помех, определяется соотношением

(30)
где r – расстояние связи, Рип – мощность источника помех, S(ξ, Θ) – максимальное значение диаграммы направленности, ξ и Θ – углы наблюдения (излучения), соответственно в горизонтальной и вертикальной плоскостях, ξ0 и Θ0 – углы максимального излучения.
Для определения мощности сигнала на выходе приемника НАП, согласованного с антенной, для случая вертикально поляризованных волн можно записать
(31)
где
 и
и  учитывают Gнап / Gип – коэффициент усиления антенны НАП и источника помех; ηнап / ηип – к.п.д. антенно-фидерного тракта НАП и источника помех, соответственно.
учитывают Gнап / Gип – коэффициент усиления антенны НАП и источника помех; ηнап / ηип – к.п.д. антенно-фидерного тракта НАП и источника помех, соответственно.Тогда при равных численных расстояниях (ρпр1В = ρпр min) радиус зоны действия источника помех с учетом конкретных параметров НАП и источника помех.
(32)
Также в четвертом разделе приведены алгоритмы определения максимальной дальности передачи корректирующей информации в информационном канале автоматизированной идентификационной системы.
Н
 а ВВП используемые в АИС УКВ-радиосигналы, в общем случае могут быть представлены, как амплитудный коэффициент передачи μ, который можно описать четырехпараметрической одномерной плотностью вероятности:
а ВВП используемые в АИС УКВ-радиосигналы, в общем случае могут быть представлены, как амплитудный коэффициент передачи μ, который можно описать четырехпараметрической одномерной плотностью вероятности:(33)
здесь σx, σy – параметры распределения, причем mx, my – математическое ожидание ортогональных компонент передаточной функции радиоканала; Ik(.) – модифицированная функция Бесселя первого рода k-го порядка; Н2k(.) – полином Эрмита порядка 2k.
Очень часто при решении задачи передачи корректирующей информации в информационном канале АИС может потребоваться учет влияние заграждающего рельефа. Как свидетельствует опыт выполнения подобных расчетов, достаточно удобно использовать равномерный, показательный и нормальный законы распределения.
В случае, когда имеет место равномерный закон будет
(34)
где Нmax и Hmin – максимальная, и, соответственно, минимальная высоты заграждающего рельефа.
Для показательного закона можно использовать соотношение
(
 35)
35)здесь α – параметр распределения (обычно 0.01….0.5).
Для нормального закона будет
(36)
При необходимости учесть относительное перемещение судового транспондера АИС относительно БС можно использовать модель, учитывающую случайный закон распределения Максвелла
(37)
где
или случайный закон распределения Релея

(38)
где

Принимая во внимание достаточно высокую насыщенность БС АИС, имеющую место в настоящее время на ЕГС ЕЧ России, необходимо определять дальность передачи корректирующих данных в информационном канале АИС с учетом влияния взаимных помех. Учитывая, что максимальная дальность передачи дифференциальных поправок БС АИС определяется соотношением

(39)
где Ртр = 10–2 – 10–6 – требуемая вероятность ошибки при приеме цифровой, Рош(Rc) – вероятность ошибки приема в информационном канале АИС двоичной цифровой информации при расстоянии БС – СТ равном Rc.
Для случая незамирающий сигнал – незамирающая помеха будет
(40)
где I0(·) – модифицированная функция Бесселя первого рода нулевого порядка.
Для случая незамирающий сигнал – помеха, замирающая по релеевскому закону распределения,
(41)
Для комбинации замирающий сигнал – не замирающая помеха
(42)
Д
 ля случая замирающий сигнал и замиряющая по релеевскому закону распределения помеха,
ля случая замирающий сигнал и замиряющая по релеевскому закону распределения помеха,(43)
В пятом разделе проведено исследование топологической структуры системы ККС на ВВП России и стратегии использования дифференциального режима в АСУ движением судов.
При проведении указанного исследования был учтен ряд особенностей передачи корректирующей информации в зонах взаимного перекрытия дифференциальных полей. Причем для случая, когда допустима замена поликомпонентной подстилающей поверхности эквивалентной монокомпонентной, рассчитан ряд номограмм, описывающих распределение минимального уровня энергетики сигнала в пределах исследуемой радиолинии (рис. 6).
Рис. 6. Номограмма минимального уровня энергетики сигнала,
при γ = 0.001 сим/м и ε = 3.
Также для случая, когда известны параметры приемопередающего оборудования, был построен ряд номограмм позволяющих определить в зависимости от свойств проводимости подстилающей поверхности минимальный уровень напряженности поля ККС для полосы частот 283.5 – 324.0 кГц
В рамках решаемой научной проблемы проведен и описан крупномасштабный эксперимент по определению параметров высокоточного радионавигационного поля дифференциальной поправки на Европейской части Единой глубоководной системы России. В ходе эксперимента непрерывно измерялись основные параметры поля создаваемого цепью ККС от Санкт-Петербурга до Астрахани, а также проводился спектральный анализ частотного диапазона, выделенного для передачи корректирующей информации в СВ диапазоне.
Рис. 7. Натурные измерения: а) Измерение параметров сигнала ККС;
б) Спектральный анализ.
Также в зоне действия ККС «Шепелевский», «Шексна», «Нижний Новгород», «Казань», «Самара», «Саратов», «Волгоград», «Астрахань» в реперных точках определялась точность навигационных местоопределений.
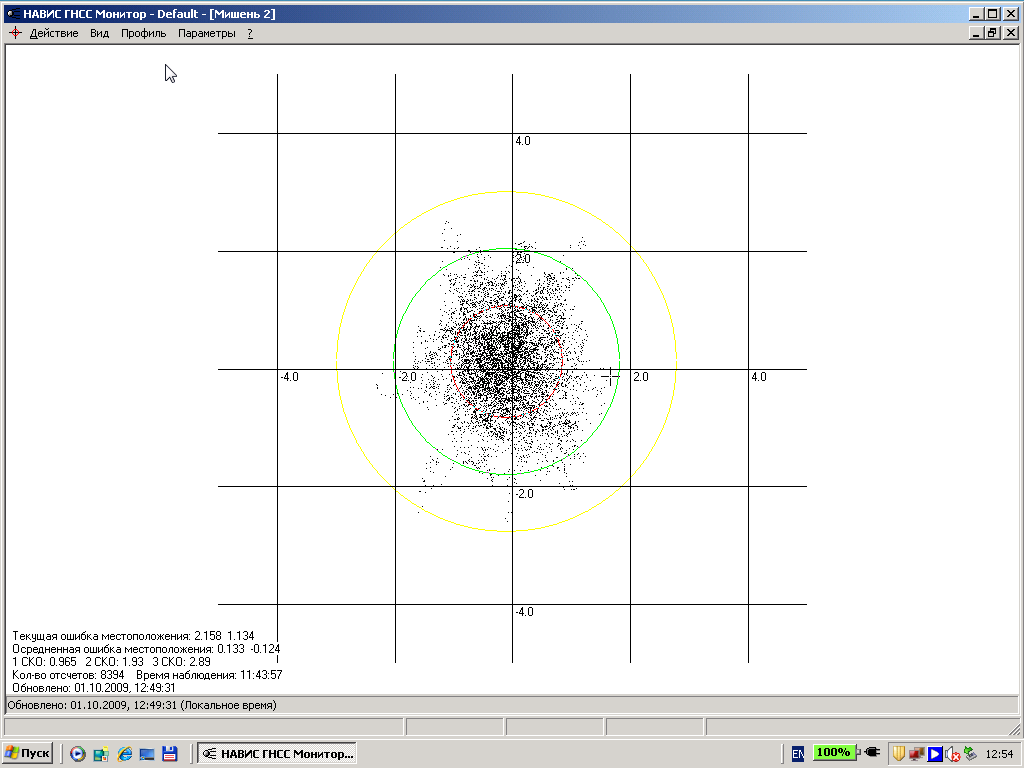
Рис. 8. Определение точности позиционирования.
В результате обработки данных экспериментальных изысканий (рис 7, 8), во-первых, были определены и нанесены на карту граница рабочей зоны всей цепи ККС, а также выявлены зоны перекрытия зон действия каждой из ККС в отдельности, во-вторых, были обнаружены зоны разрыва дифференциального поля цепи в целом.
Проанализированы различные варианты компенсации разрывов и зон недостаточного перекрытия дифференциальных полей. На основе выполненного анализа с учетом результатов натурных испытаний предложены конкретные рекомендации по ликвидации зоны разрыва дифференциального поля, расположенной между ККС «Шексна» и ККС «Нижний Новгород»
В этом разделе на базе математических моделей, раскрытых и описанных в предыдущем разделе, определены размеры зон передачи корректирующих данных ГЛОНАСС/GPS в информационном канале АИС для ряда опорных пунктов Европейской части Единой глубоководной системы ВВП России с учетом стандартной (–107 дБ), реализуемой в настоящее время и перспективной (–114 дБ) чувствительности приемных устройств судовых транспондеров АИС. На основании полученных результатов разработано рациональное топологическое распределение (рис. 9) базовых станций автоматизированной идентификационной системы с целью создания сплошного информационного поля в структуре корпоративной речной информационной системы Европейской части единой глубоководной системы ВВП России.
Рис. 9. Топология высокоточного радионавигационного поля дифференциальной поправки в СВ и УКВ диапазоне на акватории Горьковского водохранилища.
Завершен раздел расширением на конкретные концептуальные решения и рекомендации по стратегии использования дифференциальных полей СВ и УКВ диапазонах на всей акватории единой глубоководной системы ВВП России с целью использования их в корпоративной речной информационной системе.
Представлены результаты синтеза сплошных полей дифференциальной поправки, создаваемые путем комплексирования полей вырабатываемых речными ККС в СВ диапазоне и создаваемые при помощи БС АИС в УКВ диапазоне.
ЗАКЛЮЧЕНИЕ
Анализ инфокоммуникационных технологий, нашедших реализацию на внутреннем водном транспорте в виде практических приложений триадно–иерархической структуры «Корпоративная речная информационная система – Речные информационные службы–АСУ движением судов», путей, методов и средств обеспечения безопасности судоходства, мониторинга и управления транспортным процессом на внутренних водных путях России, показал, что имеет место определенная недостаточность уровня безопасности судовождения, контроля и управления движением судов, обусловленная, в основном, использованием консервативного подхода к решению указанных задач, однако, положительным образом повлиять на весь процесс в целом может широкомасштабное внедрение на внутреннем водном транспорте систем высокоточной навигации, мониторинга и управления, а также переход к инструментальным методам навигации и судовождения, строящихся на использовании систем электронной картографии, высокоточных принципах автоматического местоопределения и автоматизированной идентификации.
Таким образом, в работе сформулирована научно-техническая проблема, имеющая важное хозяйственное значение – повышение безопасности судоходства путем создания на акваториях внутренних водных путей России сплошного комплексного радионавигационного поля дифференциальной поправки в СВ и УКВ диапазона. Решение показанной научной проблемы в рамках данного научного направления позволило определить цели исследований диссертационной работы. В соответствии с которыми получены теоретическое обоснование и практическая реализация системных методов, математических моделей и алгоритмов принятия решений при проектировании, использовании и оценке состояния комплексной организационно-технической системы формирования сплошного радионавигационного поля высокоточных местоопределений подвижных объектов на ВВП России.
Научные результаты, полученные в работе, содержат решения ряда актуальных задач.
1. Концепция системного подхода к моделированию рабочих зон действия как отдельных ККС, так и их цепей, предназначенных для обеспечения корректирующей информацией различных потребителей внутреннего водного транспорта. В рамках указанной концепции были выработаны:
методика и алгоритмы определения первичных и вторичных зон уверенного приема, зон радиомолчания, а также получен комплекс решений для выявления и учета зон нелинейных переходов поля в граничных областях соседних участков подстилающей поверхности, обладающих различными проводящими способностями;
методика моделирования форм периметров зон действия речных дифференциальных подсистем ГЛОНАСС/GPS, учитывающая параметры приемопередающего оборудования, проводящие способности подстилающей поверхности, а так же воздействия на процесс передачи корректирующей информации взаимных помех;
алгоритмическое и математическое обеспечение выявления зон взаимного перекрытия дифференциальных полей при объединении отдельных ККС в цепь с целью формирования сплошного радионавигационного поля дифференциальной поправки.
- Развитие методологии построения сплошных радионавигационных полей дифференциальной поправки для обеспечения безопасности судоходства, мониторинга и управления транспортным процессом в условиях воздействия взаимных помех, на основе системного подхода к структуре и алгоритмическому обеспечению современных инфокоммуникационных систем и комплексов внутреннего водного транспорта. Исследуемый подход включает:
анализ современного международного и отечественного состояния концептуальных изысканий в области разработки, создания и эксплуатации инфокоммуникационных технологий водного транспорта, базирующихся на использовании дифференциальных систем высокоточного местоопределения;
разработку совокупности рекомендаций, предложений и научного обоснования архитектуры топологической структуры высокоточных радионавигационных полей СВ и УКВ диапазона для акватории ВВП России на основе программного моделирования, аналитических и экспериментальных изысканий;
разработку концептуальных положений, решений и рекомендаций по стратегии внедрения и использования дифференциальных полей СВ и УКВ диапазона на единой глубоководной системе ВВП России с учетом неоднородности подстилающей поверхности и негативного воздействия на процесс передачи корректирующей информации взаимных помех.
3. Теоретические и методические основы расчета дальности и форм периметров зон действия контрольно-корректирующих станций речной дифференциальной подсистемы, включают:
комплекс решений и алгоритмов, позволяющих находить минимальный уровень энергетики полезного сигнала и минимальный уровень напряженности электромагнитного поля необходимый для успешного приема дифференциальных поправок, передаваемых поверхностной волной СВ диапазона с учетом конкретных параметров приемопередающего оборудования и проводящих способностей подстилающей поверхности;
решения, позволяющие определить топологическую структуру комплексного дифференциального поля, образованного слиянием полей СВ и УКВ диапазонов, где учитывается влияние взаимных помех, а также неоднородность подстилающей поверхности, принимающей участие в процессе распространения поверхностных радиоволн СВ диапазона;
с учетом опыта математического моделирования, результатов научных изысканий и обобщения методологической базы крупнейших мировых ученых, таких как В.А. Фок, Е.Л. Фейнберг, Б. Ван-дер-Поля, М.В. Шулейкин и А.А. Сикарев, были получены новые решения, строящиеся на использовании новой теоремы сегментации N = αn + βm и алгоритмах сшивки граничных участков апроксимационных сегментов, позволяющих достаточно просто выполнять аппроксимации поликомпонентных подстилающих поверхностей состоящих из любого количества однородных участков;
выработана методика, позволяющая учитывать в общем решении воздействие взаимных помех на дальность передачи корректирующей информации в СВ и УКВ диапазонах.
4. Найден комплекс решений определения рациональной топологии зон действия ККС дифференциальной подсистемы ГЛОНАСС/GPS, работающих в СВ диапазоне для формирования сплошного высокоточного радионавигационного поля, а также оптимизации топологического распределения базовых станций АИС на ВВП единой глубоководной системы России для управления в структуре корпоративной речной информационной системы.
Этот комплекс решений, методов и алгоритмов базируется на расчете дальности и форм периметров зон действия ККС, работающих в диапазоне средних волн в случае соединения их в единую цепь с целью формирования сплошного радионавигационного поля дифференциальной поправки для обеспечения безопасности судоходства, повышения качества мониторинга и управления в структуре инфокоммуникационных триад КРИС, РИС, АСУДС. Помимо того, при формировании поля дифференциальной поправки ГЛОНАСС/GPS в УКВ диапазоне для определения оптимального топологического распределения базовых станций автоматизированной идентификационной системы учитываются особенности передачи корректирующих данных в информационном канале АИС на ВВП России, причем при определении дальности передачи дифференциальных поправок в этом диапазоне учитывается не только влияние заграждающего рельефа, но и влияние сосредоточенных по спектру помех.
5. Выработаны концептуальные положения стратегии использования дифференциальных полей ГЛОНАСС/GPS в СВ и УКВ диапазонах на ЕГС ВВП России для нужд внутреннего водного транспорта, с учетом использования комплексного дифференциального поля дальнейшего использования этого поля в качестве основы при создании инфокоммуникационных систем управления, мониторинга, навигации и связи типа КРИС, РИС, АСУ ДС, работающих для нужд внутреннего водного транспорта. В этих концептуальных положениях учтены особенности передачи корректирующей информации в СВ и УКВ диапазонах на акватории ВВП России при воздействии на процесс передачи такой информации взаимных помех. На этом пути:
на основе системного подхода выполнен конструктивный анализ данных, полученных в ходе натурных испытаний нижней части длинноволнового и верхней части коротковолнового диапазона, предназначенного для передачи дифференциальных поправок с выявлением основных возможных источников взаимных помех, имеющих место на акватории Европейской части единой глубоководной системы ВВП России;
базируясь на результатах аналитического расчета и данных экспериментальных изысканий предложены конкретные рекомендации, позволяющие при соответствующей модернизации речной дифференци–альной подсистемы ГЛОНАСС/GPS на ВВП России сформировать в СВ и УКВ диапазонах сплошное комплексное поле дифференциальной поправки;
представлены решения по оцениванию качества и точности высокоточного позиционирования в автоматическом режиме речных и судов «река-море» плавания на акватории ВВП России, в том числе и при использовании речных электронных навигационных карт в решении навигационной задачи;
приведены конкретные прикладные решения и рекомендации по построению сравнительно несложной речной дифференциальной подсистемы ГЛОНАСС/GPS и стратегии использования внутренним водным транспортом высокоточных полей позиционирования, формируемых такой дифференциальной подсистемой.
ОСНОВНЫЕ ПУБЛИКАЦИИ ПО ТЕМЕ ДИССЕРТАЦИИ
Монографии
1. Каретников В.В., Сикарев А.А. Топология дифференциальных полей и дальность действия конт–рольно-корректирующих станций высокоточного местоопределения на внутренних водных путях. / –СПб.: СПбГУВК, 2008. – 352с.
2. Каретников В.В. Архитектура зон действия локальных дифференциальных подсистем, работающих для нужд внутреннего водного транспорта. / –СПб.: Изд-во Политехнического университета, 2010. –178 с.
3. Замятин А.Г., Каретников В.В., Сикарев И.А. и др. Особенности использования судовой радиолокационной станции для обеспечения безопасности судоходства применительно к внутренним водным путям. / –СПб.: Изд-во Политехнического университета, 2009. –78 с.
4. Каретников В.В., Ракитин В.Д., Сикарев А.А. Автоматизация судовождения. / –СПб.: СПбГУВК, 2007. –264 с.
5. Каретников В.В., Сухоруков В.С., Хохлов П.П. Использование судовых радиолокационных станций для обеспечения безопасности судовождения на внутренних водных путях. / –СПб.: СПбГУВК, 2008. –139с.
Публикации, предусмотренные «Перечнем изданий ВАК»
6. Каретников В.В., Петухов Ю.В. Некоторые аспекты интеграции современных радиолокационных станций, судовых радионавигационных приборов и технических средств навигации. / Сборник научных статей «Вопросы радиоэлектроники. Вып. 2.» Серия РЛТ. 2009. С. 5–8.
7. Замятин А.В., Каретников В.В., Малявченков А.В. Особенности определения дальности действия ККС работающих в СВ диапазоне. / Сборник научных статей «Эксплуатация морского транспорта». - СПб.: ГМА им. адм. С.О. Макарова, 2008. С. 52–56.
8 Каретников В.В., Сикарев А.А. Современные инфокоммуникацион–ные технологии внутреннего водного транспорта. / Журнал «Речной транспорт (XXI) век». –М.: 2010. С. 65–67
9. Каретников В.В., Сикарев И.А. К вопросу компьютерного моде-лирования форм периметров зон действия дифференциальных дополнений спутниковых радионавигационных систем / Журнал «Проблемы информационной безопасности. Компьютерныее системы», №1. - СПб.: СПбГТУ, 2009. - С.34-37.
10. Каретников В.В., Сикарев И.А. Зависимость размеров зоны действия автоматизированной идентификационной системы от расстояния до источника взаимной помехи / Сборник научных статей «Эксплуатация морского транспорта». - СПб.: ГМА им. адм. С.О. Макарова, 2009. - С.50-55.
11. Замятин А.В., Каретников В.В., Сикарев И.А. К вопросу определения вертикальной составляющей электромагнитного поля, создаваемого контрольно корректирующей станцией с учетом неоднородной структуры подстилающей поверхности / Сборник научных статей «Эксплуатация морского транспорта». - СПб.: ГМА им. адм. С.О. Макарова, 2009. - С.58-63.
12. Каретников В.В., Сикарев И.А. Топология зон действия локальных дифференциальных подсистем на внутренних водных путях России. / Журнал «Проблемы информационной безопасности. Компьютерные системы», №4. - СПб.: СПбГТУ, 2009. - С.31-35.
13. Каретников В.В., Сикарев И.А. Влияние сосредоточенных по спектру помех на размер рабочей зоны автоматизированных инфор–мационных систем / Журнал «Проблемы информационной безопасности. Компьютерные системы», №3. - СПб.: СПбГТУ, 2009. - С.42-47.
14. Каретников В.В., Сикарев И.А. Помехозащищенность автоматичес–кой информационной системы в условиях сосредоточенных помех на внут–ренних водных путях / Приложение к журналу «Мехатроника, автоматизация, управление», №10. – СПб.: «Новые технологии», 2009. - С.62-64.
15. Каретников В.В., Сикарев И.А. Помехозащищенность информации-онного канала передачи корректирующей информации речной автоматической информационной системы / Журнал «Морская радиоэлектроника», №3. - СПб.: 2009. - С.24-28.
16. Каретников В.В., Сикарев И.А. Компьютерное моделирование высокоточных радионавигационных полей позиционирования создаваемых локальной дифференциальной подсистемой ГЛОНАСС/GPS, работающий в диапазоне средних волн / Журнал «Морская радиоэлектроника», №2. – СПб.: 2009. - С.28-30.
17. Каретников В.В., Сикарев И.А., Поплескин И.А. Особенности передачи дифференциальных поправок в информационном канале автоматизированной идентификационной системы. / Журнал «Морская радиоэлектроника», №2(32). –СПб.: 2010. –С. 18–21.
18. Бедрин И.Б., Каретников В.В., Конаржевский И.К., Сикарев И.А., Царев В.М. Использование спутниковых радионавигационных технологий и систем функциональных дополнений на внутренних водных путях России. / Журнал «Новости навигации», №-2. –М.: 2010. –С. 30–32.
19. Каретников В.В., Сикарев А.А. К вопросу информационного внедрения автоматизированных идентификационных систем на внутреннем водном транспорте. / Журнал университета водных коммуникаций. №-8. –СПб.: СПбГУВК. 2010.
20. Каретников В.В., Рудых С.В., Сикарев И.А. Влияние взаимных помех на зону действия автоматизированной идентификационной системы. /
Журнал «Проблемы информационной безопасности. Компьютерные системы», №-3 - СПб.: СПбГТУ, 2010.
21. Каретников В.В., Сикарев А.А., Соляков О.В. Влияния поликомпонентной подстилающей поверхности Земли на форму периметра зоны действия контрольно-корректирующих станций. / Журнал «Морская радиоэлектроника», №-1(23). –СПб.: 2008. –С.22–25 .
22. Каретников В.В., Сикарев А.А. Совершенствование системы управления судами с использованием автоматизированных иденти–фикационных систем на внутренних водных путях. / Журнал университета водных коммуникаций. Вып. 3(7). –СПб. СПбГУВК. 2010. –С. 93–95.
23. Волков А.Б. Каретников В.В., Сикарев И.А. Алгоритмы определения дальности и радиуса зоны действия автоматической информационной системы работающей в условиях сложной помеховой обстановки. / Журнал «Мехатроника, автоматизация, управление». №-10(103). –М.: Новые технологии. 2009. –С. 62–63.