
До практичної частини та виконання тестових завдань з дисципліни «Автоматизація виробничих процесів та мікропроцесорна техніка» для студентів спеціальності 6
| Вид материала | Документы |
Содержание1 Основи автоматизації технологічних процесів 2 Варіанти задач з тестування |
- Робоча програма методичні вказівки та контрольні завдання з дисципліни «Автоматизація, 427.36kb.
- Робоча програма методичні| вказівки| та контрольні| завдання| з дисципліни| «Мікропроцесорна, 1582.14kb.
- Ійної програми підготовки спеціаліста з напряму 0501 «Економіка І підприємництво»,, 364.83kb.
- До виконання курсової роботи з дисципліни "Основи зовнішньоекономічної діяльності", 586.25kb.
- Правила виконання містяться на початку кожного типу завдань. Відповідайте тільки після, 245.14kb.
- Методичні вказівки до виконання лабораторних робіт з дисципліни "Газопостачання" (для, 323.51kb.
- Модульно-рейтингова оцінка знань з курсу "Електротехніка та мікропроцесорна техніка", 24.13kb.
- Институту післядипломної освіти, 830.35kb.
- Институту післядипломної освіти, 592.64kb.
- Вінницький державний аграрний університет методичні вказівки, 958.2kb.
МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ
СУМСЬКИЙ ДЕРЖАВНИЙ УНІВЕРСИТЕТ
МЕТОДИЧНІ ВКАЗІВКИ
до практичної частини та виконання тестових завдань з дисципліни «Автоматизація виробничих процесів та мікропроцесорна техніка» для студентів спеціальності 6.090101 «Прикладне матеріалознавство»
заочної форми навчання
Суми
Вид-во СумДУ
2008
ЗМІСТ С.
ПЕРЕДМОВА….……………………………………4
1 Основи автоматизації технологічних процесів….5
2 Варіанти задач з тестування………………………9
СПИСОК ВИКОРИСТАНОЇ ЛІТЕРАТУРИ...…..24
ПЕРЕДМОВА
Викладання основ автоматизації технологічних процесів за традицією починається із загальних теоретичних основ автоматики та розгляду конкретних прикладів систем автоматизації у відповідній сфері виробництва, а саме у технологічних процесах металургії та матеріалознавства. При цьому контроль засвоєння навчального матеріалу зводиться до перевірки вміння студентів запам’ятати і пояснити принципи дії тих систем автоматизації, які він вивчав на лекціях та на лабораторно-практичних заняттях, а також уміння самостійно розумітися на нових схемах систем автоматизації з використанням сучасних засобів мікропроцесорної техніки.
Навчальний матеріал з автоматики пропонується вивчати у такій послідовності:
- ознайомлення з фізичними основами роботи перетворювачів інформації для систем управління;
- розгляд найпоширеніших технічних засобів для побудови локальних систем управління;
- аналіз роботи найважливіших локальних систем управління;
- ознайомлення з принципами побудови систем автоматичного управління типовими технологічними процесами з використанням сучасних засобів мікропроцесорної техніки.
Автоматизація ефективно застосовується на сучасному етапі розвитку виробництва з метою досягнення зростання показників ресурсозбереження, поліпшення екології навколишнього середовища, якості та надійності продукції. Автоматизація виробництва проводиться за допомогою автоматичних пристроїв, які можна класифікувати за різними ознаками, при цьому під «пристроєм» розуміють закінчену конструкцію.
1 Основи автоматизації технологічних процесів
Будь-який складний технологічний процес можна розчленувати на прості, які зводяться до перенесення або перетворення енергії чи речовини. Для кожного процесу треба сформулювати точну вимогу щодо його виконання. Сукупність правил, що однозначно вказують, як і в якій послідовності слід виконувати окремі технологічні операції з метою вирішення загального завдання, має назву алгоритму. У сучасному житті ми повсякденно зустрічаємося з усілякими інструкціями, умовами, правилами поведінки, рецептами тощо – а це все алгоритми.
У технологічних процесах на об’єкт впливає навколишнє середовище та різні робочі навантаження. Цей вплив називають збурювальним, оскільки звичайно заважає реалізації заданого алгоритму. Збурювальні впливи порушують виконання заданого алгоритму, тому доводиться іззовні регулювати потік енергії або речовини, що надходить від джерела до об’єкта, тобто керувати процесом. Наприклад, при внесенні у нагрівальну піч садки температура в середині печі падає і треба додати певну кількість газу для встановлення необхідної температури за вимогами технології.
У всякому технологічному процесі можна розрізнити чотири основні складові:
- знаряддя, за допомогою якого здійснюється необхідний вплив на предмет праці (технологічна складова);
- джерело енергії для виконання роботи (енергетична складова);
- засоби інформаційного забезпечення ходу технологічного процесу;
- систему керування робочим процесом, яка здійснює доцільну координацію використання знарядь виробництва і джерела енергії (управлінська складова).
Системи, які керують потоком енергії або речовини, що надходить від джерела до об’єкта керування (так звані локальні системи управління), можна відобразити узагальненою структурою, яка показана на рис.1.
Рисунок 1 – Узагальнена структура локальної
системи управління
На рис.1 прийняти такі позначення: РП – регу- люючий пристрій; ПІ – повідомча інформація про стан об’єкта (за зворотним зв’язком); КС – керуючі сигнали, що мають на меті забезпечити заданий перебіг технологічного процесу (за прямим зв’язком); Об – об’єкт курування; f – збурювальний вплив; РО – регулюючий орган; Дж – джерело енергії.
Інформація – це зміст будь-якого повідомлення про факти і події. Матеріальним носієм інформації є сигнал- фізичне явище, зв’язане з певним фактом або подією, тобто воно несе інформацію про них. Сигнали передаються по каналах зв’язку в тому чи іншому вигляді. Прикладами їх є наявність або відсутність струму в електричному колі, відхилення температури у нагрівальній печі, зміна тиску повітря в трубопроводі, механічне переміщення фізичного тіла, зміна відносного розташування темних і світлих плям (візуальне сприйняття літер, цифр, рисунків), зміна частоти і гучності звуку (слухове сприйняття мовлення, акустичних сигналів) та інше.
Структурна схема на рис.1 дає підставу для висновку, що фізичні явища можуть розглядатися з двох точок зору: матеріально-енергетичної (перенесення енергії або речовини) та інформаційної (передача сигналів). Напрям передавання інформації не завжди збігається з напрямом перенесення енергії або речовини.
У локальних системах автоматичного регулювання всі процеси в регулюючій ланці відбуваються автоматично, тобто без участі людини - оператора. Основним принципом дії цих систем є регулювання за відхиленням. Структурну схему типової системи регулювання за відхиленням зображено на рис.2.
Усі процеси в цієї системи відбуваються автоматично: вимірюється регульований параметр X(t), результат вимірювання UОС, якій формується вимірювальним перетворювачем ВП, порівнюється з UЗ, різниця ε = (UЗ - UОС) як сигнал непогодження потрапляє на вхід регулятора, де виробляється розпорядливий сигнал UР. Останній через регулюючий орган (виконавчий механізм) діє на технологічний об’єкт у напрямку усунення наслідків збурювального впливу f. Ручним способом виконується тільки одна операція – введення задавального сигналу (уставки) UЗ.
За ступенем автоматизації машини та апарати можна поділити на три групи:
1) машина або апарат з елементами автоматизму – якщо більшість систем керування, що входять до її складу, вимагають участі людини, і тільки окремі системи – автоматичні;
2) напівавтомат – машина або апарат, що в основному діють автоматично, але періодично вимагають участі людини, найчастіше – на початку технологічного процесу;
3) автомат – машина або апарат, що працює без прямої участі людини.
З метою здійснення технологічного процесу автоматизовані машини або апарати поєднуються у більш-менш складні технологічні комплекси. Основним напрямом розвитку автоматизації сьогодні для технологічних процесів є автоматизовані системи управління технологічними процесами (АСУ ТП), що становлять людино-машинні системи, які поєднують усі типові локальні системи в загальну інтегровану систему з метою оптимального керування складними технологічними процесами. У такій автоматизованій системі людина-оператор бере участь у координації роботи окремих систем управління та у виробленні найважливіших керівних рішень (зниження собівартості продукції, зменшення втрат сировини та енергії, підвищення продуктивності праці та якості продукції, поліпшення умов праці обслуговуючого персоналу, дотримання вимог екології тощо).
Центральну роль в АСУ ТП відіграють мікропроцесорні пристрої, фактичне підтримування режиму технологічного процесу в більшості АСУ ТП здійснюють типові локальні системи окремих параметрів, де все частіше поряд із технічними засобами традиційної автоматики використовуються як логічний елемент також мікропроцесорні пристрої, зокрема мікроконтролери.
Подальшим кроком у розвитку автоматизації технологічних процесів є безпосереднє цифрове керування, при якому локальні системи управління окремих параметрів взагалі виключаються із системи, а управлінські сигнали на всі виконавчі елементи надходять безпосередньо від центрального мікропроцесорного пристрою. У цих системах потреба у втручанні оператора може виникнути лише в аварійних ситуаціях.
Ефективність автоматизації залежить від технології виробництва.
2 Варіанти задач з тестування
ЗАДАЧА 1
1 Основні поняття автоматизації технологічних процесів:
- загальна структура керування технічними агрегатами
та технологічними процесами;
- місце і значення регулюючого пристрою або
розпорядчої ланки в типових системах
автоматичного регулювання;
- значення інформації в системах автоматичного
керування;
- основні ланки систем автоматики.
2 Провести аналіз схеми передавання одиниці фізичної величини до робочих засобів вимірювальної техніки.
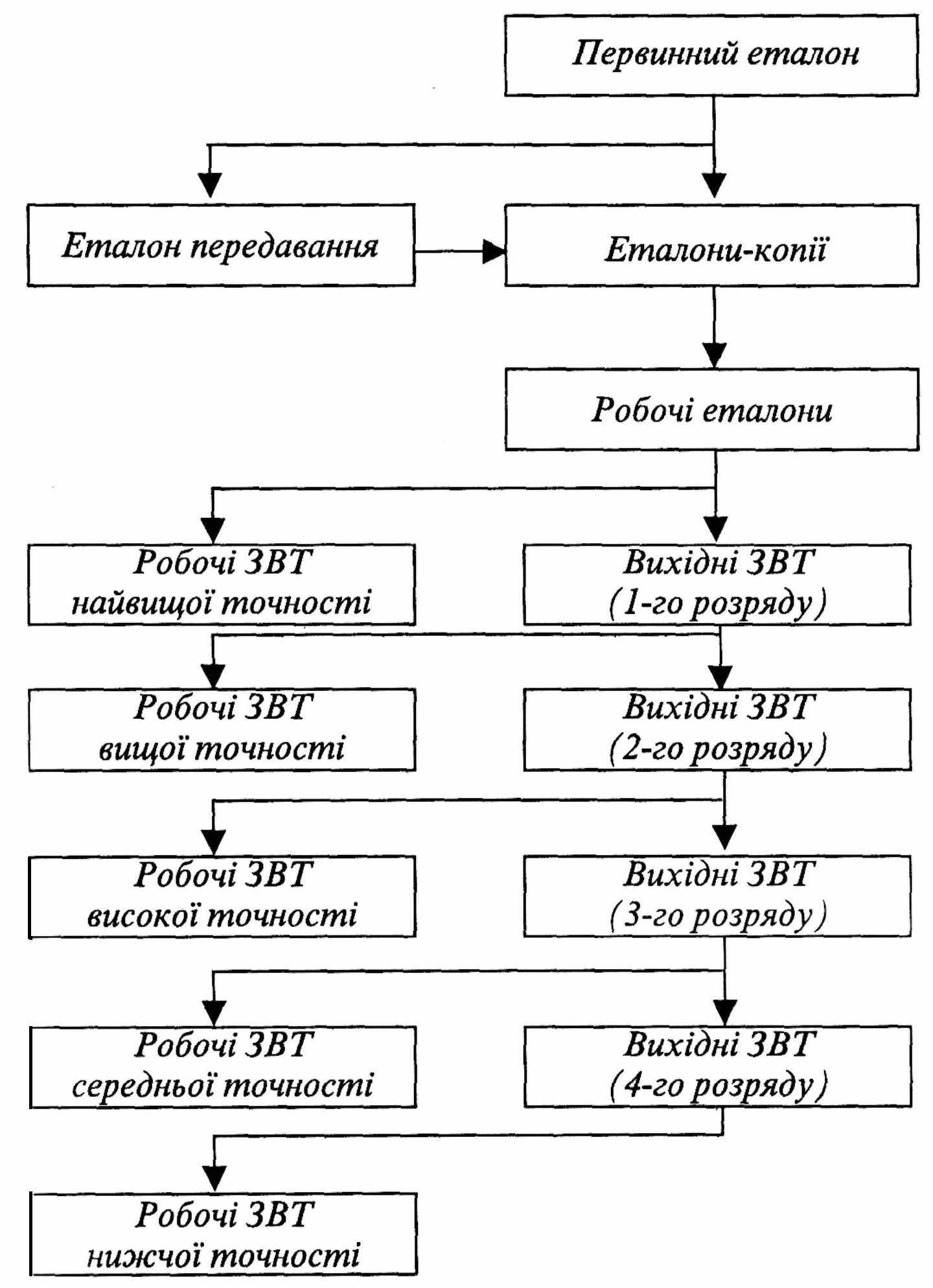
Рисунок 3 – Узагальнена схема передавання розміру
одиниць фізичних величин: ЗВТ – засоби
вимірювальної техніки
ЗАДАЧА 2
1 Математичний опис ланок систем автоматики:
- операторна форма диференційних рівнянь як основа
опису динаміки та статики ланок;
- передавальна функція, її зв'язок зі властивостями
типових ланок систем автоматики.
2 Провести аналіз та описати основні елементи вимірювального процесу за схемою на рис.4.
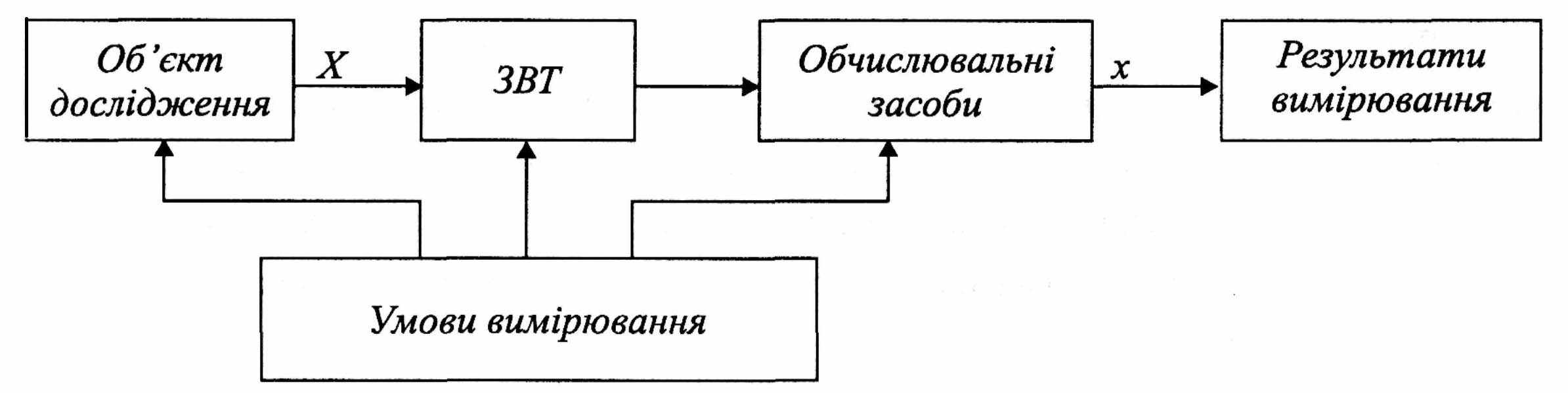
Рисунок 4 – Елементи вимірювального процесу
ЗАДАЧА 3
1 Устрій типової системи автоматичного регулювання:
- основні елементи системи, їх призначення та
сигнали, що діють у замкненій системі;
- два типи перехідних процесів у системі.
2 Описати роботу схеми вимірювання температури.
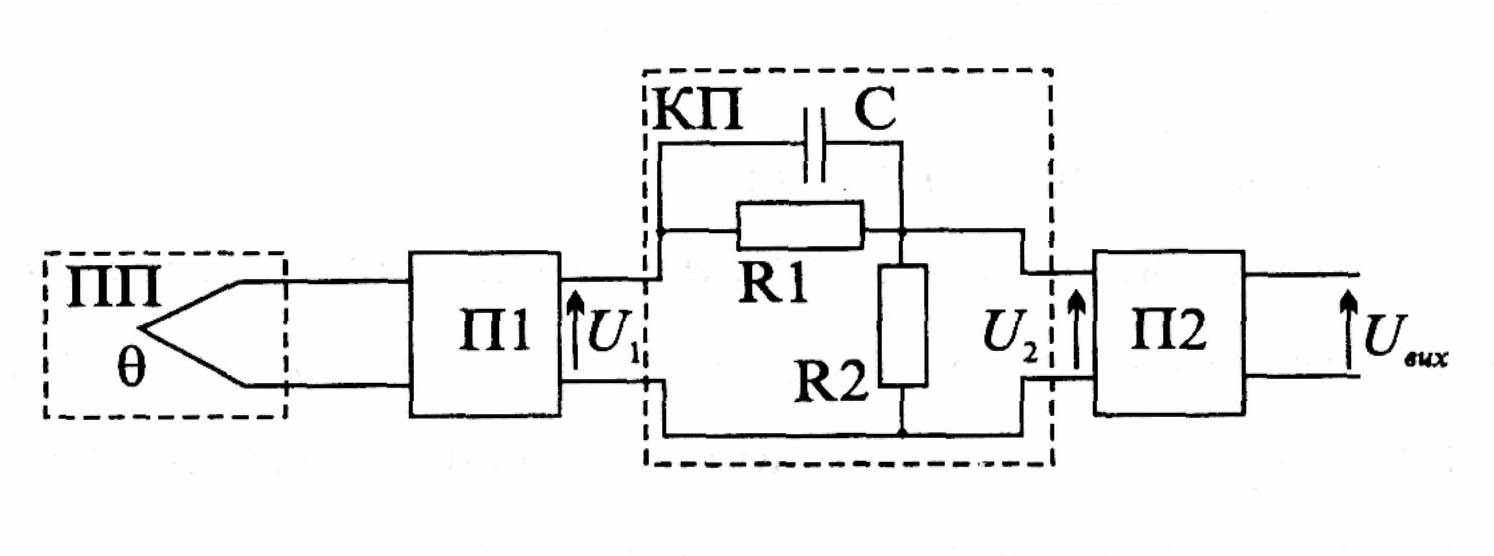
Рисунок 5 – Схема вимірювання температури термоелектричним перетворювачем: ПП – первинний
перетворювач, П1, П2 – підсилювачі, КП – корегуваль- ний пристрій
ЗАДАЧА 4
1 Поняття стійкості систем автоматичного управління:
- важлива роль стійкості систем для сталої роботи;
- основні критерії стійкості систем автоматики.
2 Проаналізувати роботу вимірювача малих розмірів на
основі ємнісного перетворювача за рис. 6, де 1 – неру-
хомий електрод; 2 – рухомий електрод; Сх – ємність;
Гх – генератор змінної частоти; Го – генератор опорної
частоти; СМ – суматор; МП – мікропроцесор.
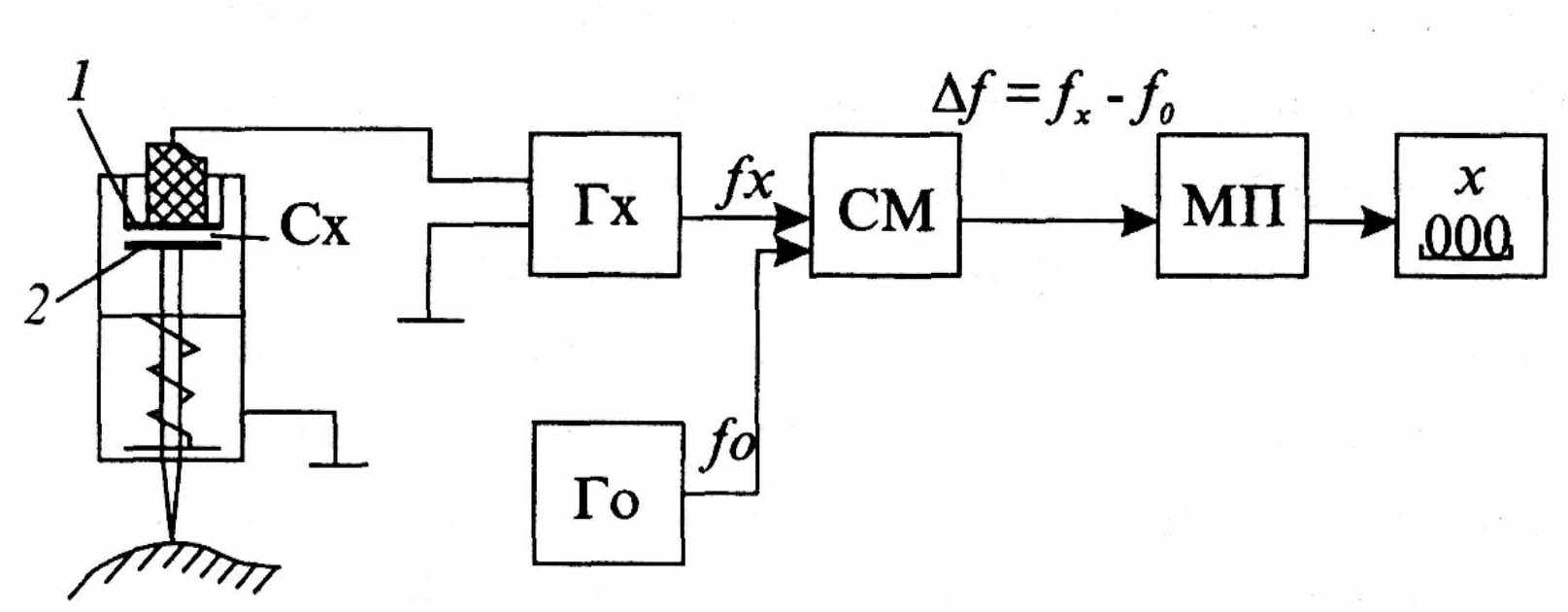
Рисунок 6 – До принципу дії ємнісного профілометра
ЗАДАЧА 5
1 Вимірювач тиску – манометр:
- будова манометра;
- робота манометра;
- схема вимірювального перетворювача на основі
манометра.
2 Проаналізувати роботу поплавкового рівнеміра з
реостатним перетворювачем за рис. 7.
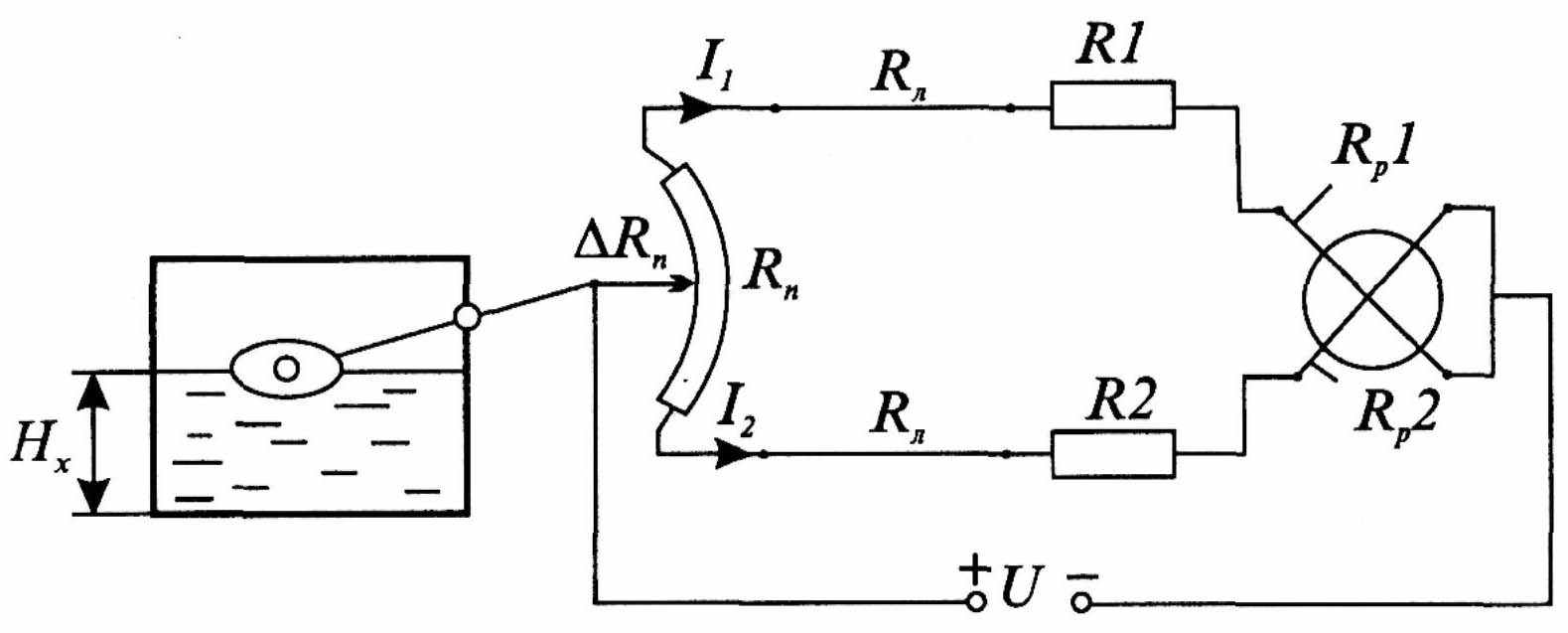
Рисунок 7 – Схема поплавкового рівнеміра
ЗАДАЧА 6
1 Вимірювання витрати за допомогою звужувальних
пристроїв:
- схема вимірювання;
- різниця тисків як показник витрати;
- засоби створення різниці тисків.
2 Пояснити принцип роботи буйкового рівнеміра за рис.8,
де 1 – буйок, 2 – чутливий елемент, 3 – пружина.
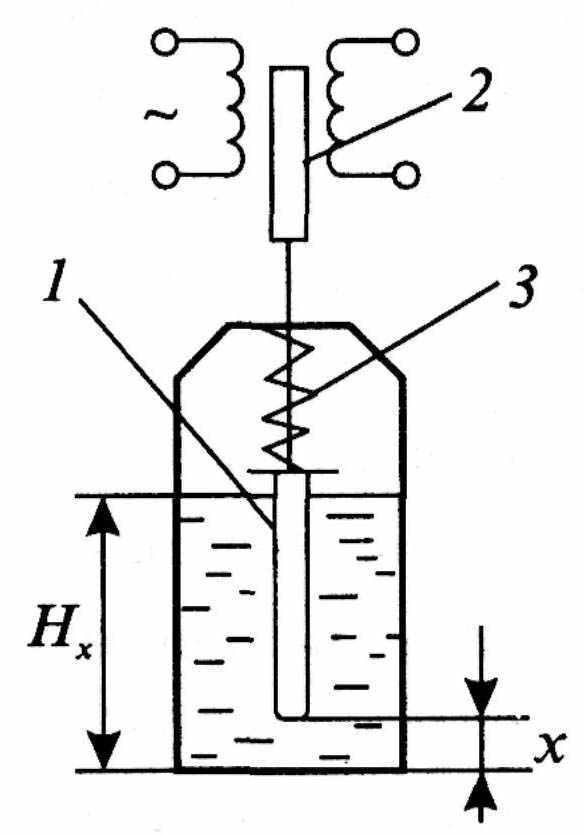
Рисунок 8 – Структура буйкового рівнеміра
ЗАДАЧА 7
1 Вимірювання витрати з постійним перепадом тисків:
- схема поршневого витратоміра;
- створення постійного перепаду тисків;
- перетворювання переміщення поршня в електричний
сигнал.
2 Проаналізувати принцип дії буйкового рівнеміра з
компенсаційним вимірювальним колом з диферен-
ціально- трансформаторними перетворювачами за
рис. 9.
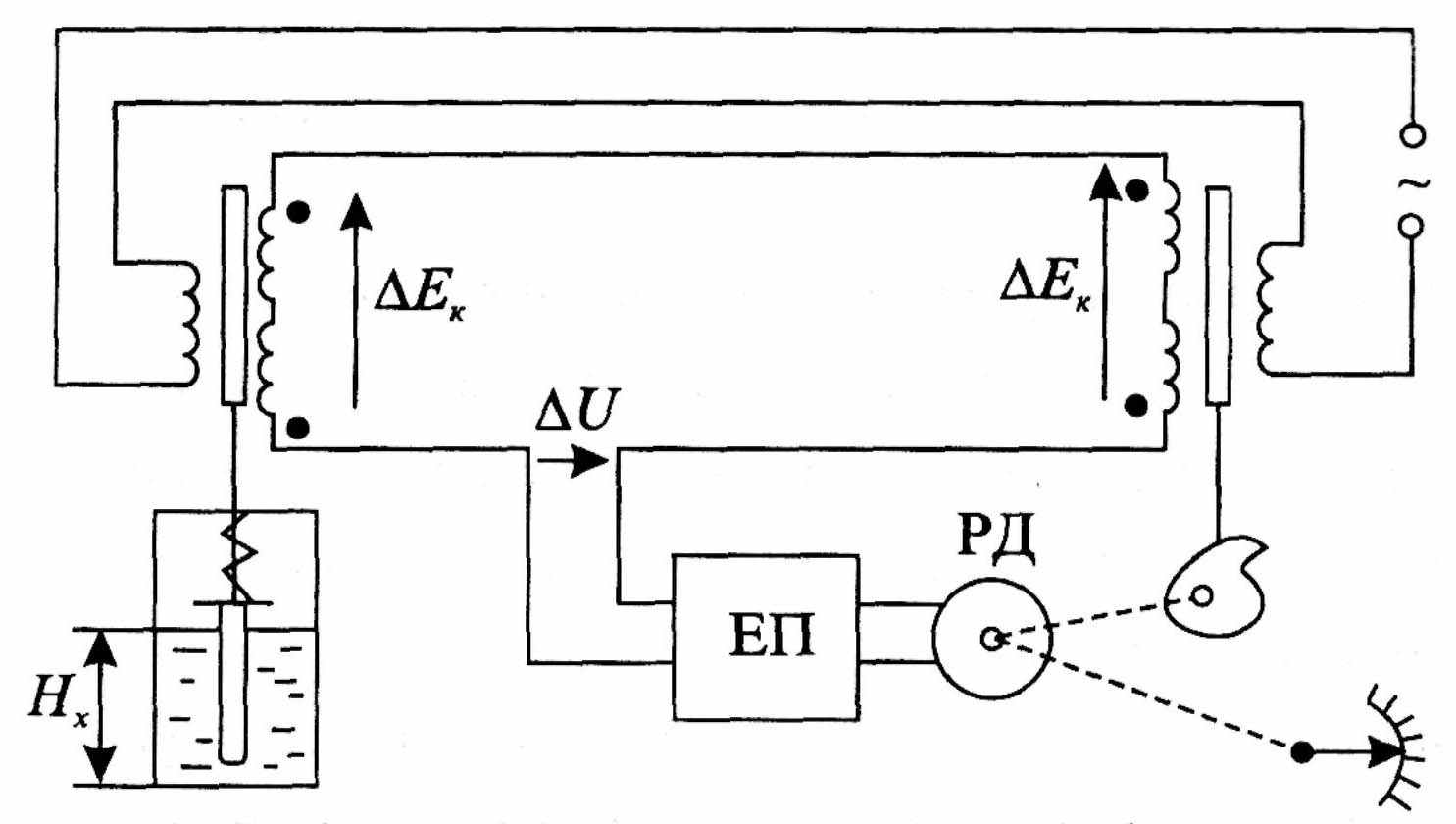
Рисунок 9 – Схема буйкового рівнеміра з
диференціально-трансформаторними
перетворювачами
ЗАДАЧА 8
1 Вимірювання рівня:
- основні способи вимірювання;
- вимірювання рівня при атмосферному тиску.
2 Пояснити принцип дії вимірювань механічних
напружень за допомогою деформації поверхні
досліджуваного об’єкта з використанням тензометрич-
ного методу та пояснити роботу вимірювальної схеми
увімкнення тензорезисторів у мостову кола за рис. 10.
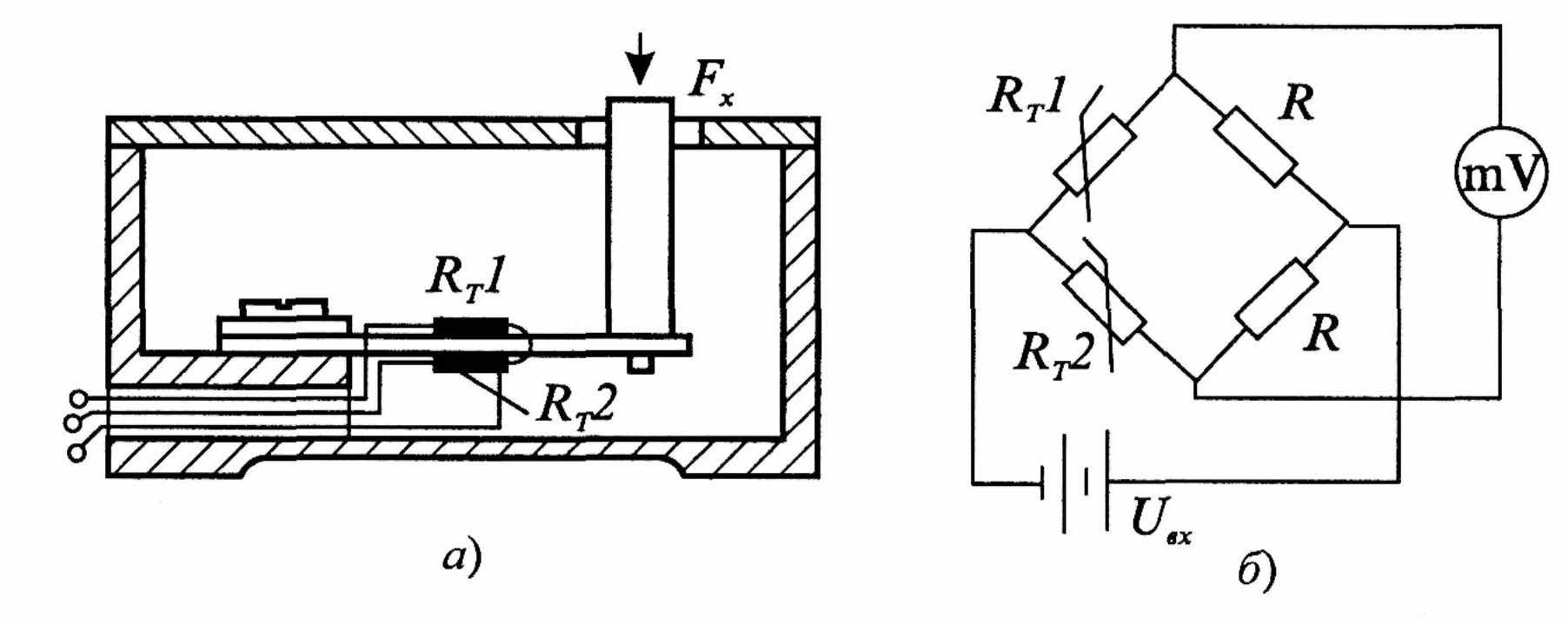
Рисунок 10 – Схема увімкнення тензорезисторів до
мостового кола
ЗАДАЧА 9
1 Вимірювання витрат ультразвуком:
- схема вимірювання;
- вимірювання часу проходження ультразвуку;
- перетворення різниці часу на вихідний цифровий
сигнал.
2 Пояснити принцип роботи терморезистивних перетво-
рювачів температури і проаналізувати роботу схеми
автоматичного моста за рис. 11, де RЛ1, RЛ2 та RЛ3 –
опори ліній зв’язку; Тmax та Тmin – максимальне та
мінімальне значення вимірюваної температури; ЕП –
електронний підсилювач; РД – реверсивний двигун;
RТ – вимірювальний терморезистор.
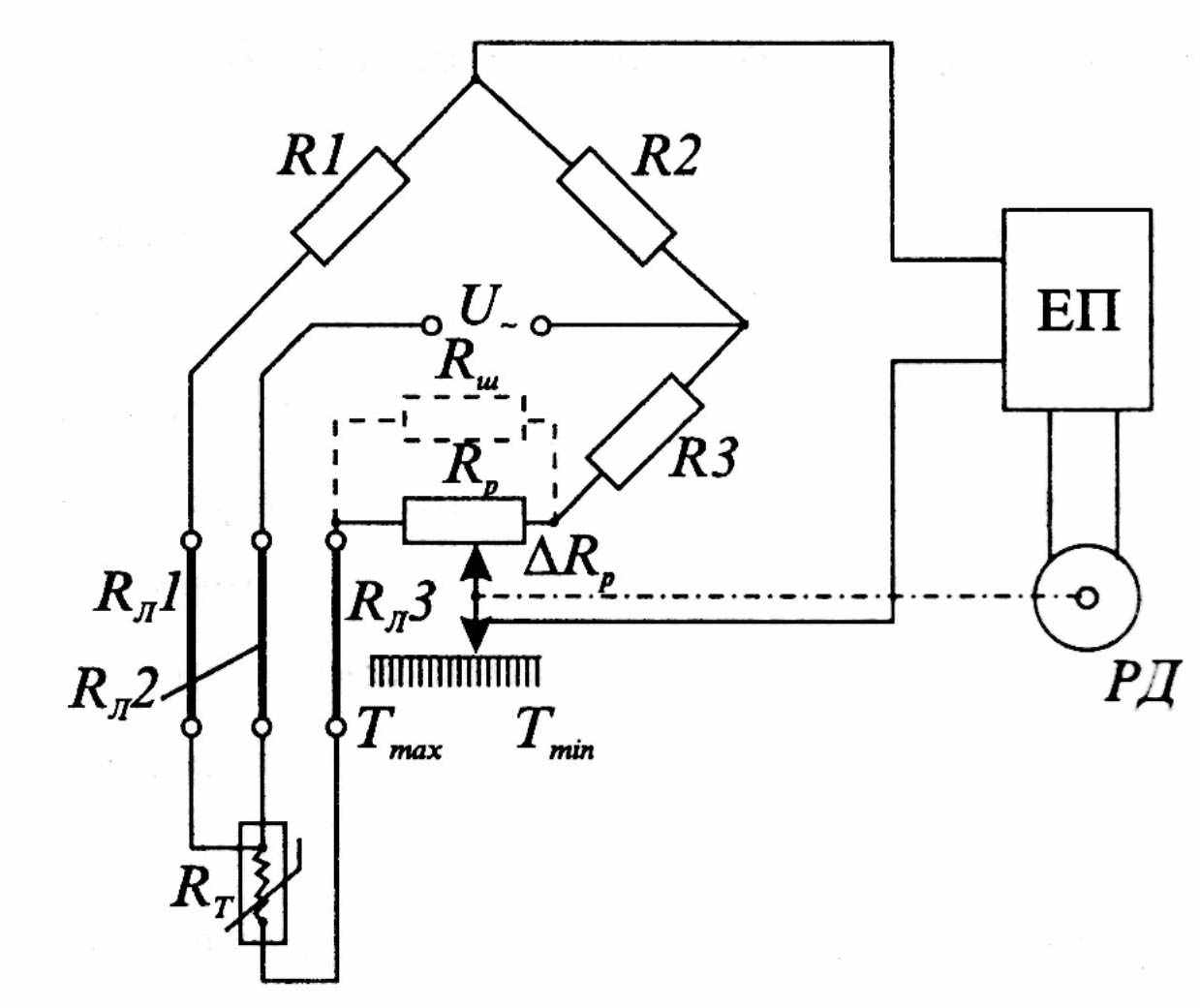
Рисунок 11 – Схема автоматичного моста для
вимірювань температури
ЗАДАЧА 10
1 Вимірювання температури термопарою:
- будова термопари;
- основні типи термопар;
- встановлення термопари у печі для вимірювання
температури;
- діапазон вимірювання і недоліки термопари.
2 Пояснити принцип вимірювання витрат за перепадом
тиску зі звужувальною діафрагмою за рис.12, де Р –
тиск; ΔР – перепад тисків; А-А і В-В – перерізи; Q-
витрата.
Зазначте основні типи звужувальних пристроїв, що створює перепад тисків на ділянці трубопроводу. Який вторинний прилад використовується для вимірювання перепаду тисків? Яка існує залежність між перепадом тиску та витратами? Поясніть залежність швидкості потоку та його тиску до і після звужувальних пристроїв.
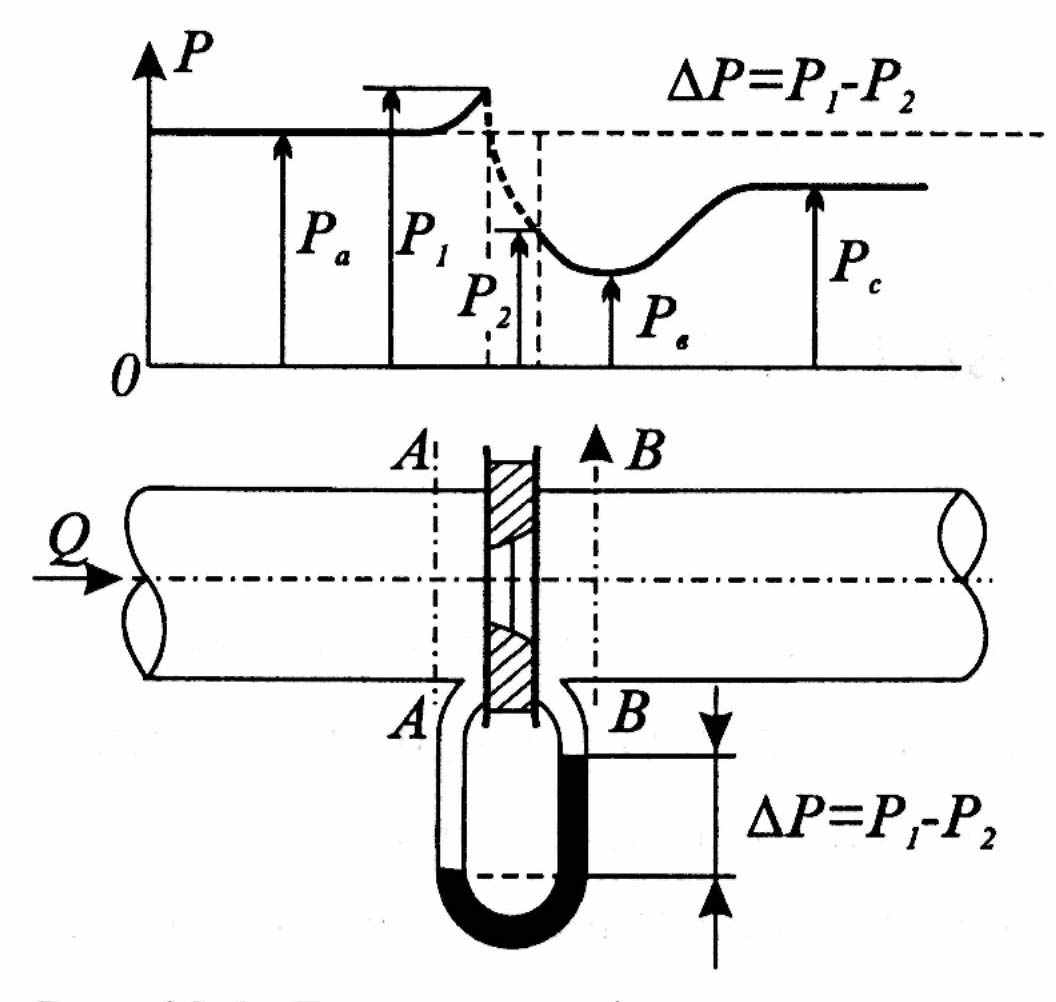
Рисунок 12 – До принципу дії витратоміра з
звужувальною діафрагмою
ЗАДАЧА 11
1 Вимірювання температури термоопором:
- будова і робота термоопору;
- основні типи термоопорів;
- їх точність та переваги;
- вимірювання за допомогою мостової схеми;
- діапазон вимірювання та галузі використання.
2 Провести аналіз роботи витратоміра астатичного
зрівноважувального перетворення, схема якого
наведена на рис. 13, де К – компресор; РД –
реверсивний двигун; ЕП – електронний підсилювач;
Т – тахометр; Л – лічильник; Q – витрата.
Зазначте переваги вимірювання перепаду тисків
диференціальним манометром з урівноважуванням тисків.
Зазначте умови та особливості вимірювання витрат за перепадом тиску, галузі його застосування.
Які недоліки має цей метод вимірювання?
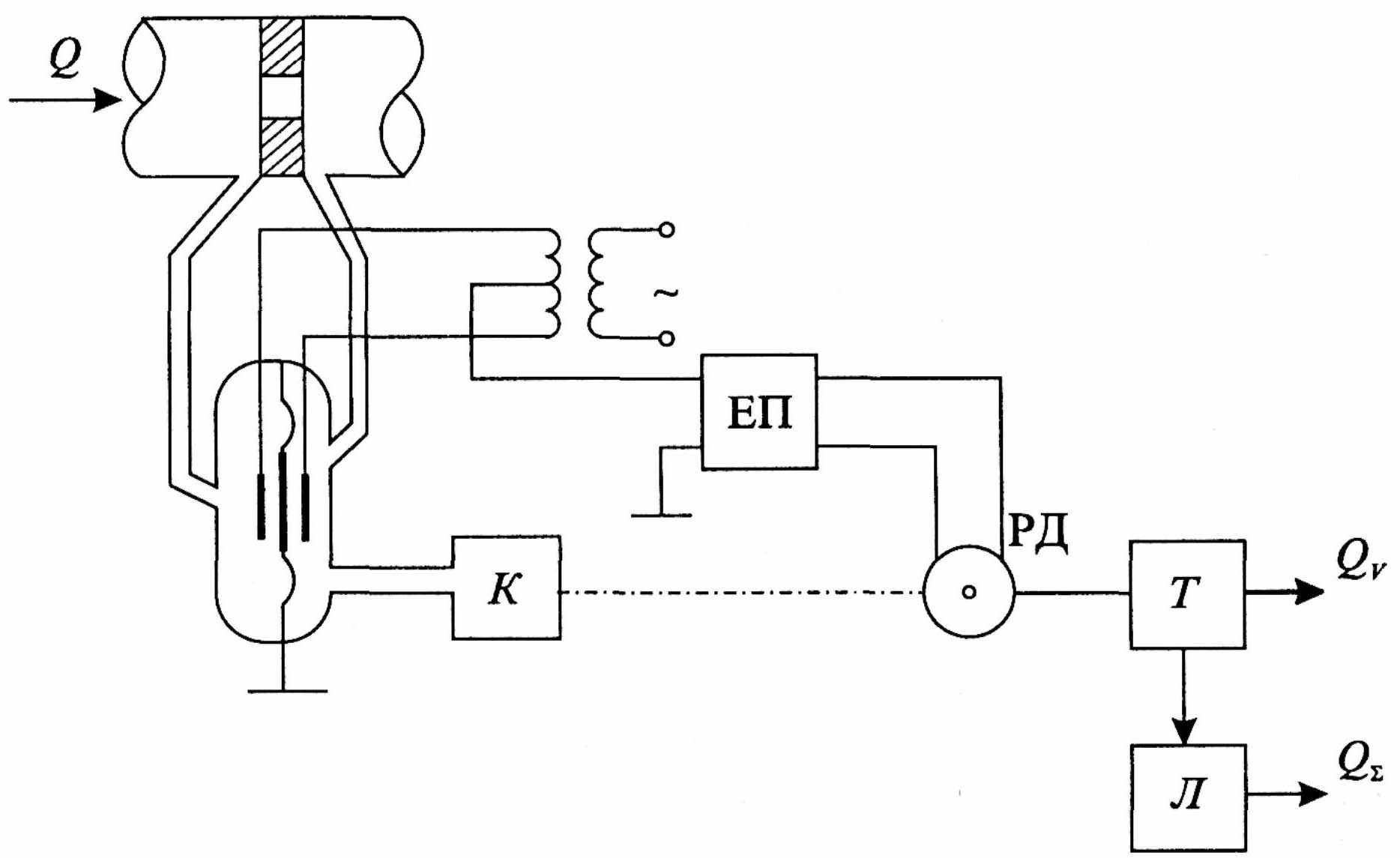
Рисунок 13 – Принципова схема витратоміра
астатичного зрівноважувального перетворення
ЗАДАЧА 12
1 Інформаційне забезпечення систем автоматичного
керування:
- алгоритм опитування вимірювачів;
- місця вимірювального перетворювача і
відлікового приладу.
2 Пояснити принцип роботи ротаметра як витратоміра
сталого перепаду тиску за рис. 14.
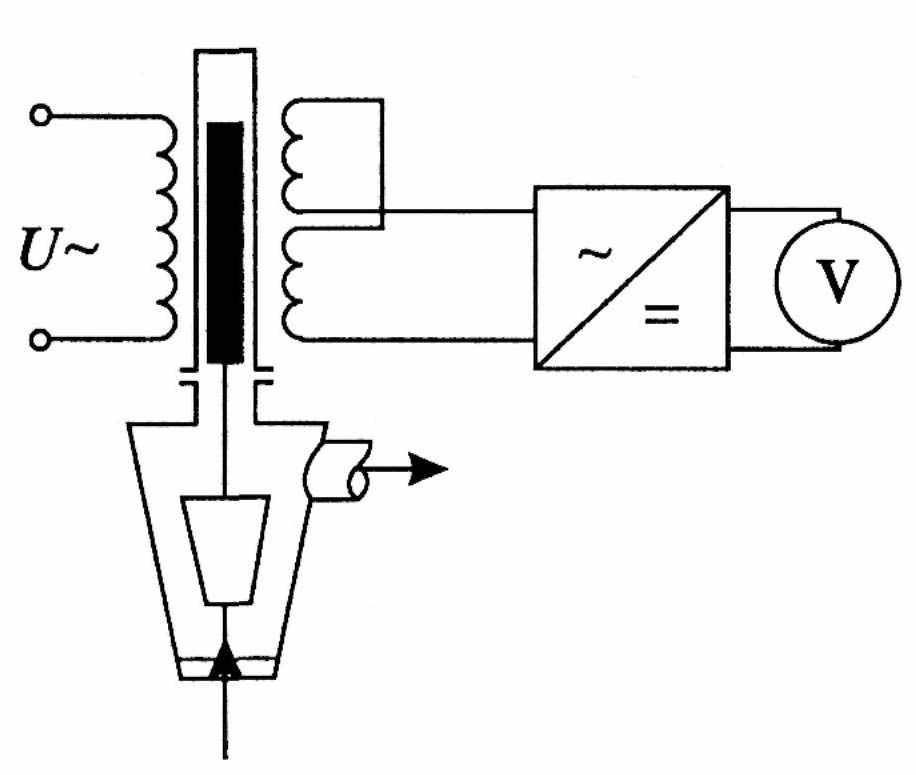
Рисунок 14 – Схема ротаметра з диференціально- транс-
форматорним вторинним перетворювачем
ЗАДАЧА 13
1 Розбіжність вимірюваної величини:
- закон розподілу величин;
- основні показники нормального розподілу.
2 Пояснити принцип дії оптичного пірометра для
вимірювання температури за рис. 15.
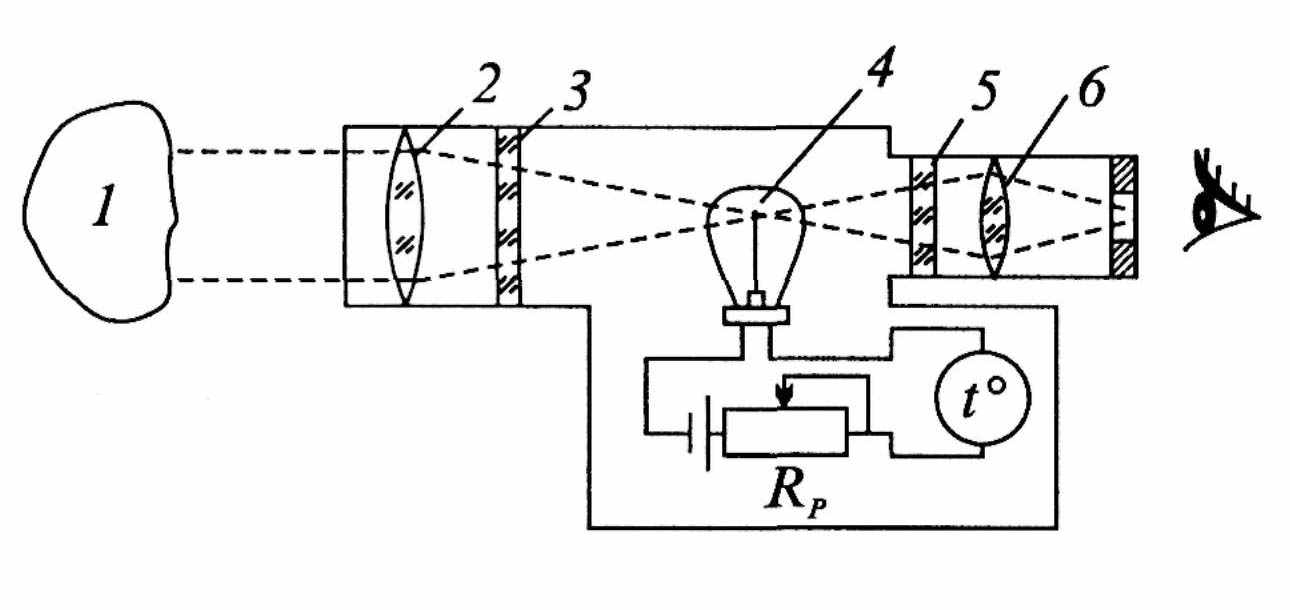
Рисунок 15 – До принципу дії оптичного пірометра:
1 – тіло, температура якого вимірюється;
2,3,5 і 6 – лінзи; 4 – пірометрична лампа
ЗАДАЧА 14
1 Алгоритм опитування вимірювачів:
- послідовний алгоритм опитування;
- пріоритетне опитування декількох параметрів;
- необхідна частота опитування.
2 Пояснити роботу вимірювання температури термометром опору за рис. 16.
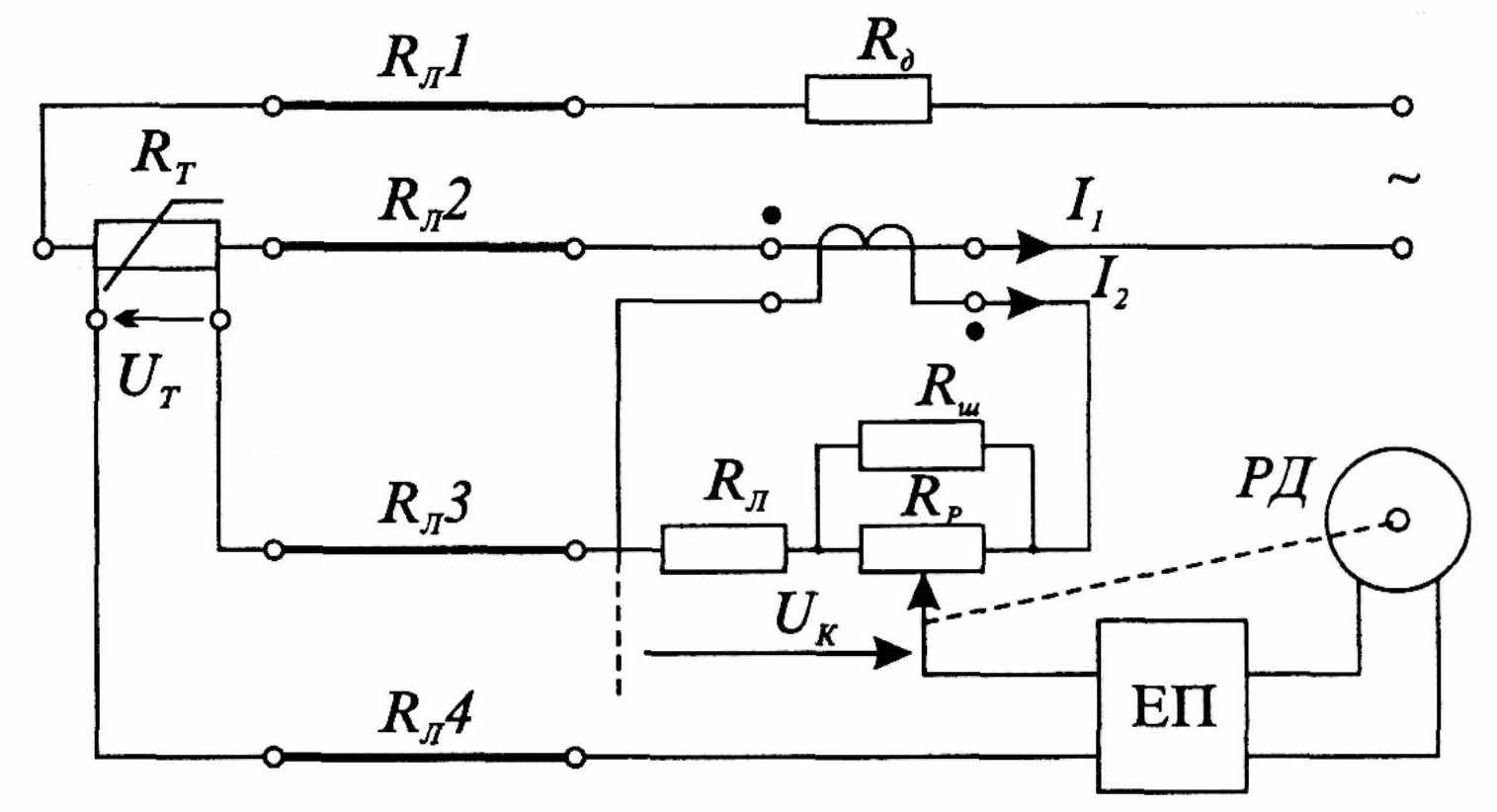
Рисунок 16 – Схема автоматичного компенсатора для
вимірювання температури
ЗАДАЧА 15
1 Класифікація локальних систем автоматичного
управління:
- системи управління за збуренням;
- системи управління за відхиленням;
- переваги замкнених систем управління за
відхиленням вихідної величини.
2 Пояснити роботу автоматичного потенціометра, який
призначений для вимірювань температури за
допомогою термоелектричного перетворювача за
рис. 17, де Тχ – термопара; R – електричні опори; ЕП –
електронний підсилювач; РД – реверсивний двигун.
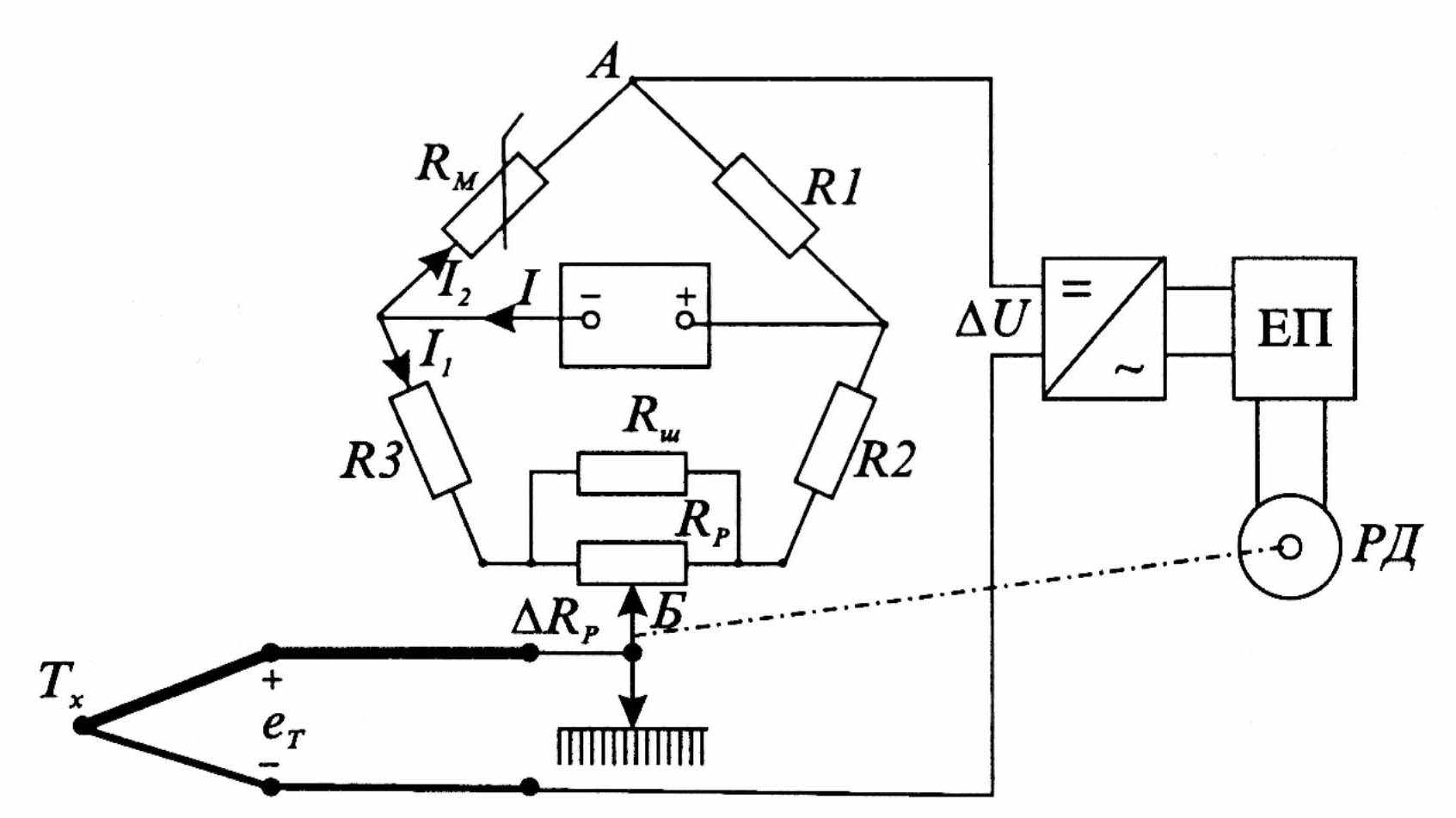
Рисунок 17 – Схема автоматичного потенціометра для
вимірювань температури
ЗАДАЧА 16
1 Двопозиційне регулювання технологічних параметрів:
- простота та легкість будови двопозиційних систем
регулювання;
- недоліки двопозиційних систем регулювання;
2 Проаналізувати будову та роботу цифрового
вимірювального приладу за рис. 18.
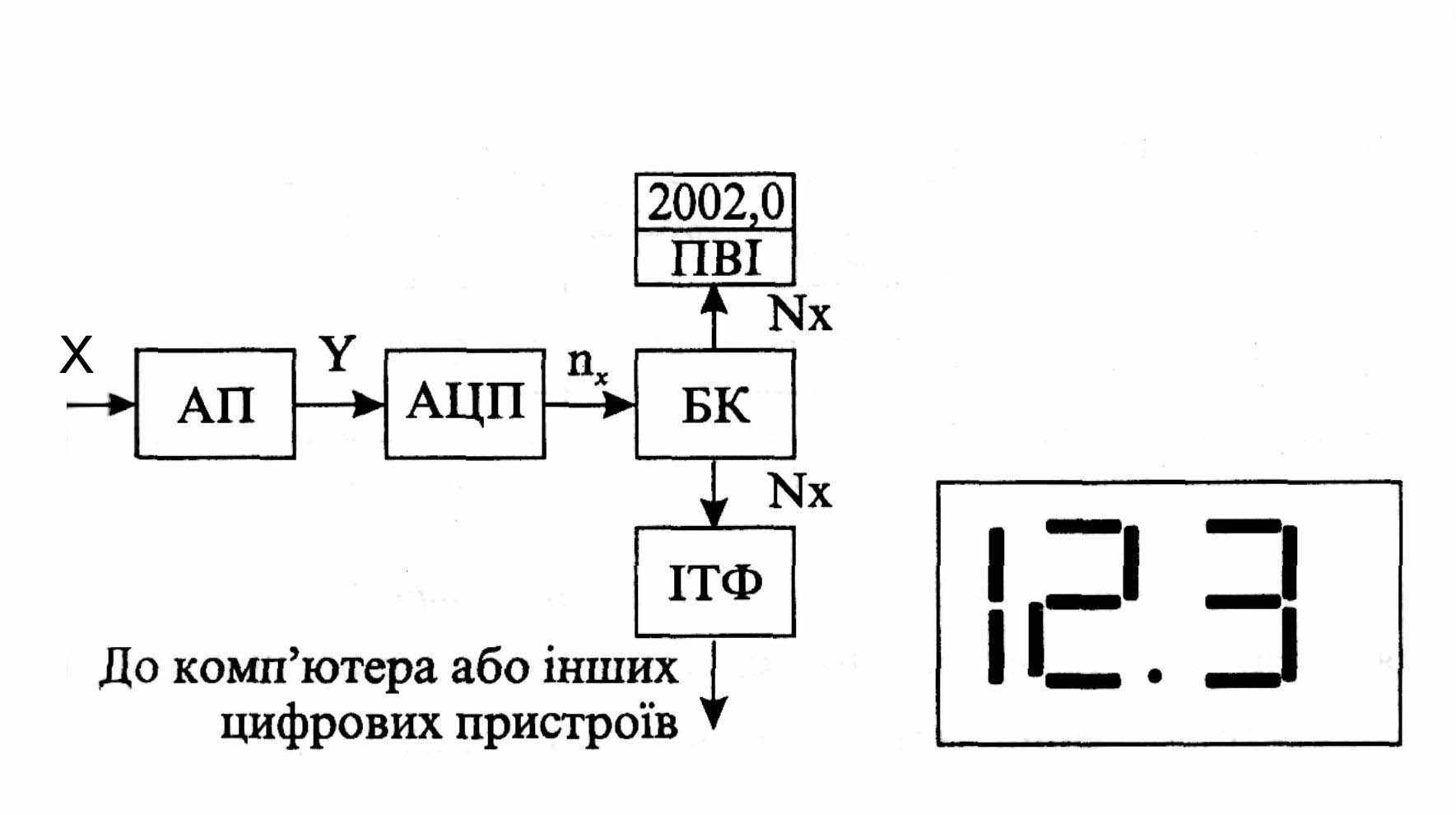
Рисунок 18 – Узагальнена структурна схема цифрового
вимірювального приладу
ЗАДАЧА 17
1 Основні поняття синтезу систем автоматичного
управління:
- методи та засоби аналізу технологічних об’єктів;
- основні етапи синтезу, їх взаємозв’язок;
- провідна роль технологів у процесі синтезу систем
управління технологічними процесами.
2 Описати та проаналізувати роботу системи
автоматичного регулювання температури в сушильній камері за схемою на рис. 19, виділить її основні ланки за функціональним призначенням.
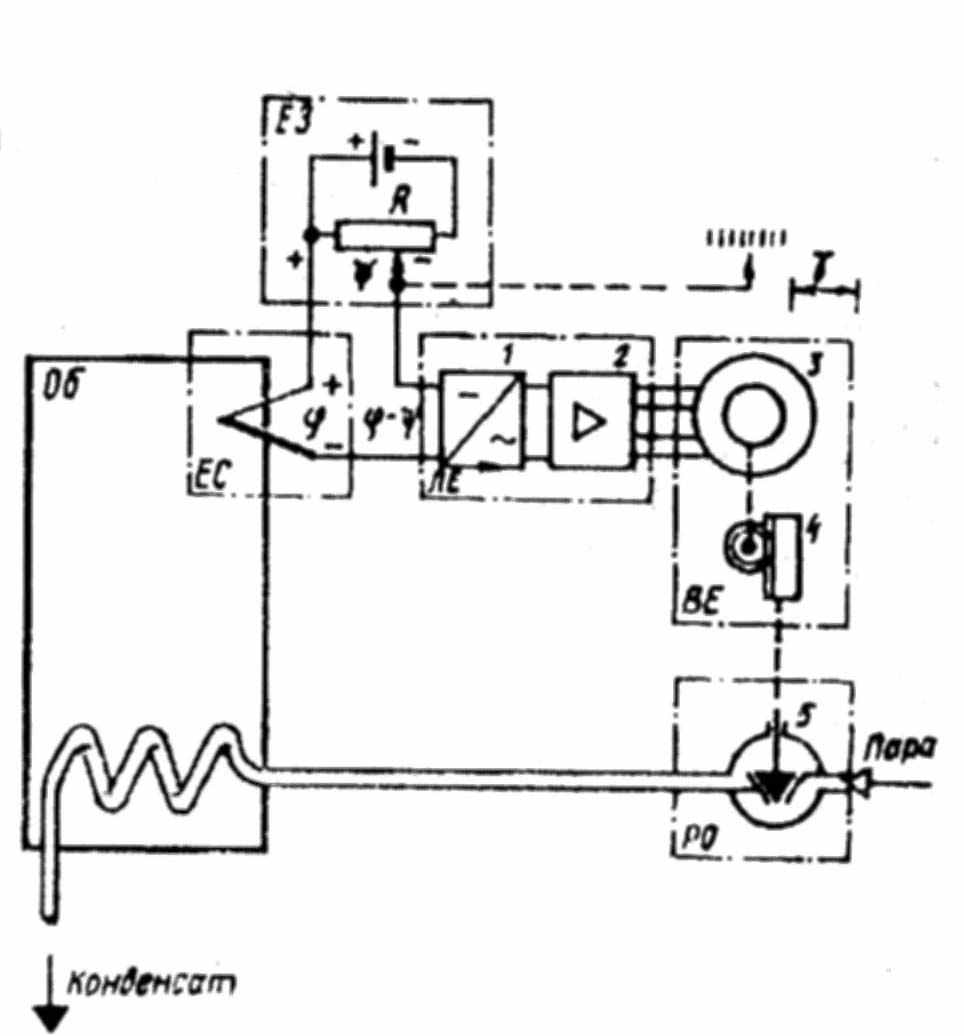
Рисунок 19 – Автоматичне регулювання температури в
сушильній камері
ЗАДАЧА 18
1Ступені автоматизації технічних агрегатів та технологічних процесів:
- використання окремих елементів автоматизму;
- напівавтомати, їх загальна характеристика;
- агрегати-автомати, їх значення у сучасному
виробництві.
2 Описати та проаналізувати роботу системи
автоматичного регулювання температури у камері
електричного нагрівання, яка наведена на рис. 20.
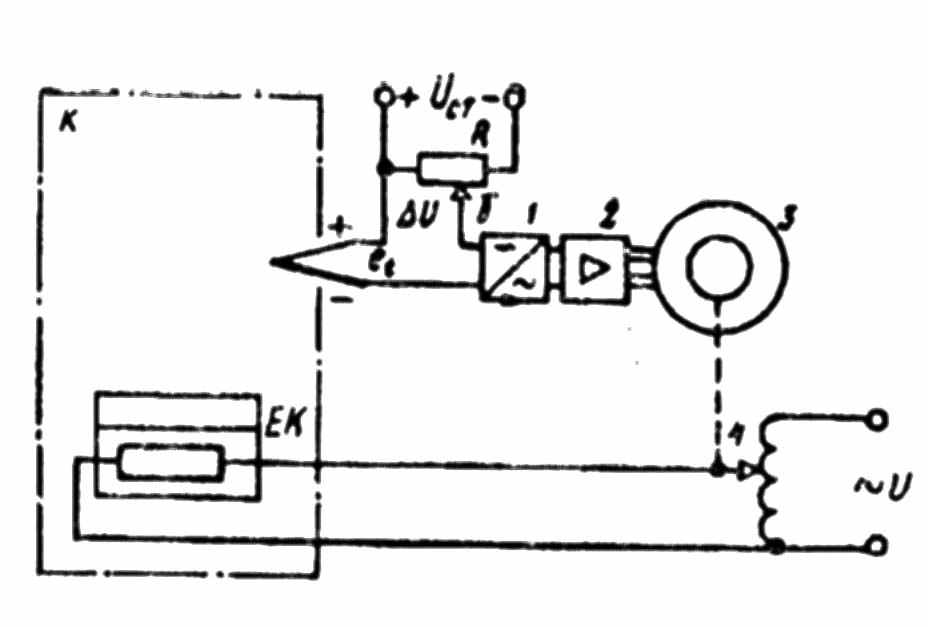
Рисунок 20 - Система електронагрівання камери
ЗАДАЧА 19
1Автоматизовані системи управління технологічними процесами (АСУ ТП) – основний напрям розвитку сучасної автоматизації:
- основна мета АСУ ТП;
- участь людини-оператора у координації роботи
окремих систем управління та у виробленні
найважливіших керівних рішень.
2Проаналізувати необхідні схеми автоматичного регулювання і вимірювання температури теплообмінника за схемою, яка наведена на рис.21.
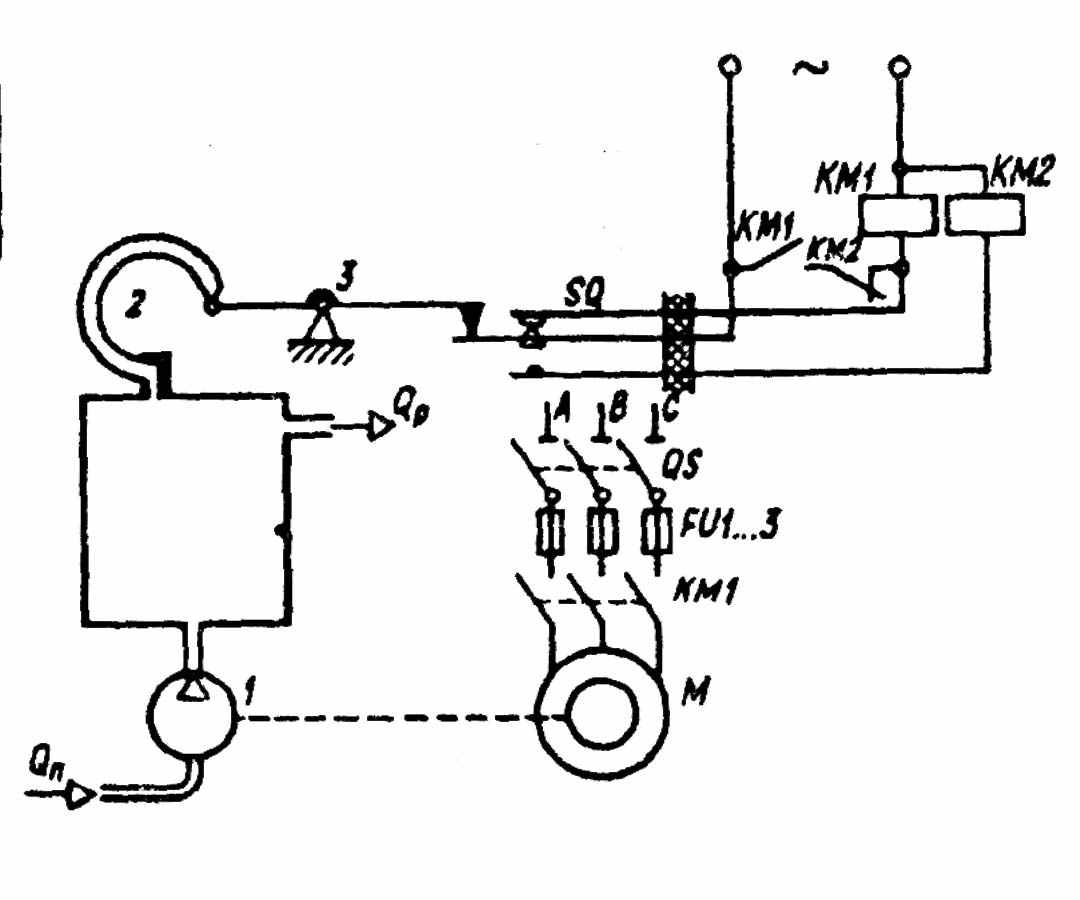
Рисунок 21 - Схема автоматичного регулювання і
вимірювання температури теплообмінника
ЗАДАЧА 20
1 Центральна роль мікропроцесорних пристроїв, зокрема мікроконтролерів, в АСУ ТП:
- якісні зміни у структурі АСУ ТП у зв’язку з
впровадженням мікропроцесорних пристроїв;
- безпосереднє цифрове керування – подальший крок у
розвитку автоматизації технологічних процесів.
2 Проаналізувати спрощену функціональну схему програмованого мікроконтролера за рис. 22. Показати переваги гнучких логічних структур відносно жорстких.
Відповісти, коли і як здійснюється програмування цих типів контролерів?

У
К1
ВП
К2
РП
ЛП





ЗП


Кл
Р
исунок 22 – Спрощена функціональна схема програ-мованого мікроконтролера
У- вузол узгодження; К1, К2 – вхідний та вихідний комутатори; ЛП – логічний процесор; РП – регістр пам’яті; ВП – вихідний підсилювач; ЗП – запам’ятовувальний пристрій; Кл – клавіатура.
СПИСОК ВИКОРИСТАНОЇ ЛІТЕРАТУРИ
1. Головко Д.Б., Рего К.Г., Скрипник Ю.О. Автоматика і автоматизація технологічних процесів: Підручник. – К.: Либідь, 1997.
2. Поліщук Є.С., Дорожовець М.М., Яцук В.О. та ін. Метрологія та вимірювальна техніка: Підручник. – Львів: Видавництво «Бескид Біт», 2003.
3. Романенко В.Д. Методи автоматизації прогресивних технологій: Підручник. – К.: Вищ. школа, 1995.