Российская федерация федеральная служба по интеллектуальной собственности, патентам и товарным знакам
| Вид материала | Документы |
СодержаниеМелешков Геннадий Андреевич (RU) Радиоприемник цифровой информации |
- Российская федерация федеральная служба по интеллектуальной собственности, патентам, 56.11kb.
- Российская федерация федеральная служба по интеллектуальной собственности, патентам, 18.96kb.
- Российская федерация федеральная служба по интеллектуальной собственности, патентам, 520.15kb.
- Российская федерация федеральная служба по интеллектуальной собственности, патентам, 92.21kb.
- Российская федерация федеральная служба по интеллектуальной собственности, патентам, 31.66kb.
- Российская федерация федеральная служба по интеллектуальной собственности, патентам, 35.17kb.
- Российская федерация федеральная служба по интеллектуальной собственности, патентам, 73.08kb.
- Российская федерация федеральная служба по интеллектуальной собственности, патентам, 72.99kb.
- Российская федерация федеральная служба по интеллектуальной собственности, патентам, 59.93kb.
- Российская федерация федеральная служба по интеллектуальной собственности, патентам, 38.13kb.
| | | | ||||||||||||||||||||||||
| |
| | ||||||||||||||||||||||||
| |
(54) РАДИОПРИЕМНИК ЦИФРОВОЙ ИНФОРМАЦИИ (57) Реферат: Изобретение относится к радиотехнике и может быть использовано в радиосистемах с фазовым методом модуляции для приема блоков цифровой информации по каналам связи. Достигаемый технический результат - учет и компенсация паразитного смещения фазового сигнала от эффекта Доплера. Устройство содержит полосовой фильтр, согласованный фильтр, балансный модулятор, демодулятор, блок памяти цифровых отсчетов сигнала фазового детектора амплитудного, решающий блок символьный, два декодера блочных, прерыватель приема блока сигналов, блок обработки фазового сигнала, блок сдвига полосы частот, получатель информации, при этом один из входов балансного модулятора подключен к выходу генератора шумоподобных сигналов. 2 з.п. ф-лы, 13 ил. | | ||||||||||||||||||||||||
Изобретение относится к радиотехнике и может быть использовано в радиосистемах с фазовым методом модуляции для приема блоков информации по каналам связи. На входе радиоприемника действует сумма сигнала и помехи x(t)=uk(t)+ n(t), прием происходит в отсутствие и наличии эффекта Доплера. Приемник обеспечивает вхождение в связь по несущей частоте и слежение за несущей частотой, усиливает принятый сигнал, переносит сигнал в область промежуточных частот и видеочастот, демодулирует сигнал и преобразует его в блоки цифровой информации, которые передает получателю информации.
Близким по технической сущности к предлагаемому устройству является приемное устройство [1, с.69-83], содержащее фильтры сигнала, выполняющие оптимальную обработку сигнала, которые целенаправлены на уменьшение влияния шума, воздействующего на вход приемника. При этом шумы, обусловленные эффектом Доплера, не подавляются.
Указанный недостаток, а именно: шумы, обусловленные эффектом Доплера, частично устраняется в приемном устройстве [2].
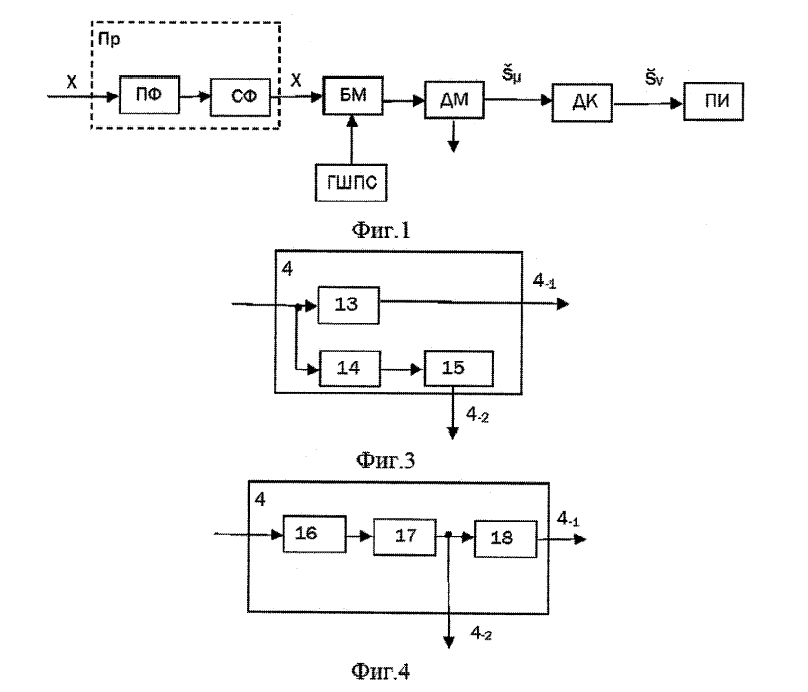
Наиболее полно шумы, обусловленные эффектом Доплера, устраняются в радиоприемнике [3], принятом за прототип, который содержит (см. Фиг.1) приемник (ПР), вход которого является входом полосового фильтра, который соединен с согласованным фильтром, выход которого является выходом приемника и подключен к первому (сигнальному) входу балансного модулятора (БМ), к второму входу которого подключен генератор широкополосного сигнала (ГШПС), выход (БМ) подключен к входу демодулятора (ДМ), первый выход которого соединен с входом декодера (ДК), со второго выхода (ДМ) снимаются отсчеты фазового сигнала, выход (ДК) соединен с получателем информации (ПИ). Последовательно соединенные полосовой фильтр (ПФ) с полосой пропускания F и согласованный фильтр (СФ) обеспечивают ограничение полосы приема на радиочастоте, что ограничивает влияние других радиосистем различного назначения на полезный принимаемый сигнал приемника. Выбор параметров фильтров (ПФ) и (СФ) зависит от способа оптимальной обработки:
- создание равномерной амплитудно-частотной характеристики, линейность фазово-частотной характеристики в заданном диапазоне частот;
- использование стробирования;
- использование оптимальных, квазиоптимальных схем приема сигналов при наличии межсимвольных искажений;
- линейный гармонический корректор сигнала для ослабления межсимвольных помех.
Приемник выполняет вхождение в связь по несущей частоте и слежение за несущей частотой, усиливает принятый сигнал, переносит сигнал в область промежуточных частот и видеочастот, выполняет демодуляцию, фильтруя принимаемый сигнал от помех, и декодирует принимаемый сигнал посредством помехоустойчивого декодирования блоков информации, исключая неправильно принятые символы.
Неправильно принятые символы могут образовываться от эффекта Доплера.
Для синхронизации передаваемого сигнала по частоте и задержке от эффекта
Доплера [2] приемник содержит балансный модулятор (БМ), который выполняет функции перемножителя, и генератор широкополосного сигнала (ГШПС). Блок модуляторов (БМ) определяет и учитывает величину частоты Доплера для несущей частоты сигнала fc, определяет требуемую частоту гетеродинов fг, переносит сигнал в промежуточную радиочастоту fп, компенсирует доплеровское смещение несущей частоты fc±fд и задержку сигналов, преобразуя радиосигнал в видеосигнал. Технический результат этого устройства заключается в том, что позволяют при наличии шумовых помех и эффекта Доплера избежать выхода из синхронизма принимаемого сигнала и опорного сигнала.
Демодулятор (ДМ) анализирует x(t) и принимает решение о том, какой сигнал был передан, и в соответствии с принятым решением выдает символ оценки
 . Если
. Если  , то осуществлен правильный прием, если
, то осуществлен правильный прием, если  , то при принятии решения была совершена ошибка из-за помехи на входе приемника. Демодулятор (ДМ) определяет каждый сигнал блока информации. Декодер (ДК), использующий помехоустойчивое кодирование, исправляет ограниченное количество ошибок бит информации в кадре, вызванных шумами и эффектом Доплера. С выхода декодера (ДК) получателю информации (ПИ) передается блок информации в зависимости от сформированной в ДК статусной информации.
, то при принятии решения была совершена ошибка из-за помехи на входе приемника. Демодулятор (ДМ) определяет каждый сигнал блока информации. Декодер (ДК), использующий помехоустойчивое кодирование, исправляет ограниченное количество ошибок бит информации в кадре, вызванных шумами и эффектом Доплера. С выхода декодера (ДК) получателю информации (ПИ) передается блок информации в зависимости от сформированной в ДК статусной информации.Однако в известном устройстве-прототипе происходит оценка изменения частоты f∂ для автоподстройки от эффекта Доплера для одной из частот (несущей частоты, центральной частоты спектра, частоты спектра, по которой определяются
д
синхроимпульсы бит информации и пр.). Сигнал передается спектральными составляющими, каждая из которых получает от эффекта Доплера свое смещение fi (по формуле Доплеровского сдвига частоты). Преобразование сигнала в область видеочастот убирает полностью изменение частот от эффекта Доплера только для одной частоты. У всех остальных спектральных составляющих гетеродин устраняет доплеровское смещение не полностью, перенос по оси частот преобразователями
.
частоты происходит на величину частоты гетеродина, равную f∂.
В результате неполной компенсации возникают частотно-фазовые смещения спектральных составляющих фазового сигнала от эффекта Доплера, что объясняет возникновение паразитных фазовых смещений (ПФС) видеосигнала, влекущих возникновение ошибок в символах информации. ПФС могут быть постоянны и изменяться, в том числе периодически, в пределах кадра информации. Период ПФС может составлять 1,1 мс. То есть прототип не дает одинаковую компенсацию эффекта Доплера для всех составляющих спектра передаваемого сигнала. ПФС в кадре носят случайный характер, так как зависят от эффекта Доплера и от спектра передаваемого сигнала в кадре. ПФС искажают информацию подобно шумам, поэтому отнесены к шумам.
Технический результат предложенного радиоприемника цифровой информации (Фиг.2, Фиг.3, Фиг.4) заключается в учете и компенсации паразитного смещения фазового сигнала от эффекта Доплера.
На Фиг.2 представлена структурная схема радиоприемника цифровой информации, содержащая следующие блоки:
1 - полосовой фильтр (ПФ);
2 - согласованный фильтр (СФ);
3 - балансный модулятор (БМ);
4 - демодулятор (ДМ);
5 - декодер блочный (ДК);
6 - получатель информации (ПИ);
7 - прерыватель приема блоков сигналов (ППБС);
8 - блок обработки фазового сигнала (БОФС);
9 - блок сдвига полосы частот (БСПЧ);
10 - решающий блок символьный (РБС);
11 - второй декодер блочный (ВДК);
12 - блок памяти (ПАМ).
На Фиг.3 приведен первый вариант выполнения демодулятора 4, содержащий:
13 - детектор энергетический (ДЭ);
14 - фазовый детектор амплитудный (ФДА);
15 - аналого-цифровой преобразователь (АЦП).
На Фиг.4 приведен второй вариант реализации демодулятора 4, содержащий:
16 - второй фазовый детектор амплитудный (ВФДА);
17 - аналого-цифровой преобразователь (АЦП);
18 - второй решающий блок символьный (ВРБС).
С учетом приема блоков информации в предлагаемом приемнике при фазовом методе модуляции (КИМ-ФМn) приняты обозначения:
- символ
 принимает значения "0" или "1", решение принимается «решающим правилом» демодулятора ДМ;
принимает значения "0" или "1", решение принимается «решающим правилом» демодулятора ДМ;- символы - блок символов, который подлежит декодированию декодером ДК;
 - символы - блок символов после декодирования декодером ДК, если применялось декодирование с исправлением ошибок, и все ошибки в блоке были исправлены, или ошибок в блоке не было.
- символы - блок символов после декодирования декодером ДК, если применялось декодирование с исправлением ошибок, и все ошибки в блоке были исправлены, или ошибок в блоке не было.Радиоприемник цифровой информации содержит соединенные последовательно полосовой фильтр (ПФ) 1, согласованный фильтр (СФ) 2, балансный модулятор (БМ) 3, демодулятор (ДМ) 4, декодер блочный (ДБ) 5, получатель информации (ПИ) 6, причем второй вход балансного модулятора (БМ) 3 подключен к выходу генератора шумоподобных сигналов (ГШПС), со второго выхода демодулятора (ДМ) 4 снимаются отсчеты фазового сигнала, отличается тем, что в него введены прерыватель приема блоков сигналов (ППБС) 7, блок обработки фазового сигнала (БОФС) 8, блок сдвига полосы частот (БСПЧ) 9, решающий блок символьный (РБС) 10, второй декодер блочный (ВДБ) 11, блок памяти (ПАМ) 12, причем вход прерывателя приема блоков сигналов (ППБС) 7 подключен ко второму выходу декодера блочного (ДБ) 5, а выход соединен с первыми входами блока обработки фазового сигнала (БОФС) 8 и блока сдвига полосы частот (БСПЧ) 9, выход которого через последовательно соединенные решающий блок символьный (РБС) 10, второй декодер блочный (ВДК) 11 подключен ко второму входу получателя информации (ПИ) 6, а второй выход демодулятора (ДМ) 4 подключен к входу блока памяти (ПАМ) 12, выход которого соединен со вторым входом блока обработки фазового сигнала (БОФС) 8 и третьим входом блока сдвига полосы частот (БСПЧ) 9, второй вход которого подключен к выходу блока (БОФС) 8.
По первому варианту выполнения демодулятора (ДМ) 4 с выхода балансного модулятора БМ (3) сигнал поступает на вход демодулятора (ДМ) 4, который является входом фазового детектора амплитудного (ФДА) 14 и входом детектора энергетического (ДЭ) 13, выход которого является первым выходом демодулятора (ДМ) 4, второй выход которого подключен к выходу аналого-цифрового преобразователя (АЦП) 15, вход которого подключен к выходу фазового детектора амплитудного (ФДА) 14.
По второму варианту выполнения демодулятора (ДМ) 4 с выхода балансного модулятора БМ (3) сигнал посупает на вход демодулятора (ДМ) 4, который является входом второго фазового детектора амплитудного (ВФДА) 16, выход которого соединен со входом аналого-цифрового преобразователя (АЦП) 17, выход которого соединен со входом второго решающего блока символьного (ВРБС) 18, выход которого является первым выходом демодулятора (ДМ) 4, второй выход которого подключен к выходу аналого-цифрового преобразователя (АЦП) 17.
Радиоприемник цифровой информации работает следующим образом. Блоки (ПФ) 1, (СФ) 2, (БМ) 3 приемника делают прием информации в реальном масштабе времени.
С помощью полосового фильтра (ПФ) 1 добиваются ограничения полосы приема на радиочастоте, что ограничивает влияние других радиосистем различного назначения на полезный принимаемый сигнал приемника. Однако фильтр с ограниченной полосой пропускания служит причиной образования переходных процессов и искажения бит передаваемого сигнала. Выбор параметра фильтра зависит от способа оптимальной обработки. При приеме сигналов [1, с.69-83] применяют оптимальную обработку на видеочастоте интегратором, установленным на выходе синхронного детектора. Методы оптимальной обработки учитывают: воздействие на вход приемника белого гауссовского шума, появление межсимвольных искажений импульса кодовой комбинации от наложения откликов от предшествующих импульсов. При этом оптимальная обработка может содержать:
- создание равномерной амплитудно-частотной характеристики, линейность фазо-частотной характеристики в заданном диапазоне частот;
- использование стробирования, использование оптимальных, квазиоптимальных схем приема сигналов при наличии межсимвольных искажений;
- использование стробирующих импульсов, выделенных в результате предварительной тактовой синхронизации;
- линейный гармонический корректор сигнала для ослабления межсимвольных помех.
Из рассмотренного видно, что оптимальная обработка целенаправлена на уменьшение влияния шумовых помех и ограниченной полосы пропускания от межсимвольных помех.
Балансный модулятор (БМ) 3. Примером балансного модулятора может служить балансный модулятор приемного устройства ФМ сигналов по [2], блок корреляторов которого содержит перемножители и интеграторы, обеспечивающие выполнение функций поиска, захвата и слежения за спектром сигнала. Для вхождения в связь используется опорный сигнал в виде ФМ ШПС. При наличии эффекта Доплера частота гетеродина основного канала корректируется и применяется корректировка длительности импульсов опорного сигнала. Технический результат этого устройства заключается в том, что устройство содержит схемы, которые позволяют при наличии эффекта Доплера избежать выхода из синхронизма принимаемого сигнала и опорного сигнала. Определяется и учитывается величина разностной частоты, знак разностной частоты, учитываются средняя частота радиосигнала fc, частоты гетеродинов fг, промежуточные радиочастоты fп.
Фазовый детектор энергетический (ДЭ) 13 демодулятора (ДМ) 4 работает на основе отношения Рс/Рш. Примером энергетического детектора служит фазовый детектор, воснове которого лежит кинематический фильтр. Схемное решение предусматривает измерение отношения сигнал/шум по несущей, выставление уровня принимаемого сигнала на входе интегратора со сбросом. (ДЭ) 13 решает, что есть бит от превышения уровня сигнала, накопленного интегратором, по отношению к уровню шума.
Моменты сброса интегратора вырабатываются схемой символьной синхронизации. Амплитудные значения фазовых отсчетов не определяются. Фазовый детектор амплитудный (ФДА) 14 преобразует выходной сигнал демодулятора (ДМ) 3 в фазовый сигнал амплитуды
 где обозначена амплитуда полезного фазового сигнала
где обозначена амплитуда полезного фазового сигнала  .
. Демодулятор (ДМ) 4 содержит (Фиг.3, Фиг.4) аналого-цифровой преобразователь 15 (17). Аналого-цифровой преобразователь преобразует фазовый сигнал изменяющегося напряжения в последовательность цифровых отсчетов. Пусть блок содержит k бит информации, тогда для блока информации будет mk отсчетов, m - число отсчетов на символ информации по теореме Котельникова.
Цифровые отсчеты (АЦП) с выхода 4- 2 блока 4 записываются в блок памяти 12 (ПАМ).
Применяемые для борьбы с шумами фильтры не исключают полностью искажений и потерь принимаемой информации. Для уменьшения потерь служит декодер блочный (ДК) 5 помехоустойчивого кодирования, который исправляет ошибки символов блока, возникающие от шумов и эффекта Доплера. Пример – декодер Рида-Соломона (R-S).
Декодер с R-S кодом (255, 223) имеет хорошую корректирующую способность при всплеске ошибок. При декодировании R-S кодового блока на приемном конце корректируется до 16 ошибок на блок. Если число ошибочных символов на блок превышает 16 ошибок, то ошибочные символы обнаруживаются в процессе декодирования и выставляется статусная информация о качестве декодированных данных.
Декодер (ДК) 5 содержит два выхода. На первый выход ДМ 4 передается блок бит, если ошибки не обнаружены или исправлены. На второй выход ДМ 4 передается сигнал статусной информации, означающий, что кодовый блок отбраковывается и стирается. Сигнал второго выхода открывает работу других устройств командой «Включено».
Декодер 5 (ДК) определяет приемлемость блока данных для использования по назначению в зависимости от числа правильно принятых бит. Правильно принятый блок информации передается без задержки с выхода 5- 1 декодера блочного (ДК) 5 на первый вход 6- 1 получателя информации (ПИ) 6, а статусная информация передается через выход 5- 2 на вход прерывателя приема блоков сигналов (ППБС) 7, с выхода которого сигнал поступает на первые входы блока обработки фазового сигнала (БОФС) 8 и блока сдвига полосы частот (БСПЧ) 9. Блок обработки фазового сигнала (БОФС) 8 определяет начальное смещение υс м о фазового сигнала в блоке и параметры периодичности смещения постоянной составляющей υс м ф(t) фазового сигнала; а блок сдвига полосы частот (БСПЧ) 9 компенсирует указанные смещения.
Блок памяти (ПАМ) 12 запоминает отсчеты фазового сигнала ec(ti).
Блок обработки фазового сигнала (БОФС) 8.
На первый 8- 1 вход блока обработки фазового сигнала (БОФС) 8 поступает сигнал «Включено», который открывает работу БОФС. Работа БОФС начинается, когда (ДК) 5 обнаруживается неисправимое количество ошибок в блоке. Отсчеты фазового сигнала из блока памяти (ПАМ) 12 поступают на второй 8- 2 вход блока БОФС 8. В результате обработки фазовых отсчетов определяются оценка фазы φ1 фазового сигнала в начале блока и оценивается по скорости смещения фазового сигнала компенсируемая частота. По записанным в память отсчетам БОФС определяет параметры смещения фазового сигнала способом [4, стр.428]. Преобразованиясодержат следующие вычислительные операции:
- оценка фазы φ1 в начале мерного интервала на отрезке T1;
- оценка фазы φ2 в конце мерного интервала на отрезке Т2;
- определение компенсируемой частоты
 и компенсируемой фазы сигнала в начале мерного интервала φг=φс р-φ1; n – число перескоков фазы на 2 π; φс р - требуемое положение начального уровня. Оценки φг и Ωг передаются с выхода БОФС в БСПЧ.
и компенсируемой фазы сигнала в начале мерного интервала φг=φс р-φ1; n – число перескоков фазы на 2 π; φс р - требуемое положение начального уровня. Оценки φг и Ωг передаются с выхода БОФС в БСПЧ.Блок сдвига полосы частот (БСПЧ) 9 использует устройство сдвига полосы частот по [5], которое выполняет компенсацию ПФС. В литературе это называется применение способа улучшения помехоустойчивости цифрового демодулятора с использованием напряжения смещения и многоуровневого квантования 161.
Алгоритм компенсации заключается в следующем. Отсчеты фазового сигнала из блока ПАМ 12 поступают на третий 9- 3 вход БСПЧ 9, на первый вход 9- 1 поступает сигнал «Работа», на второй вход 9- 2 БСПЧ 9 поступают оценки параметров сдвига φг, Ωг. БСПЧ 9 выполняет компенсацию смешения сдвигом полосы частот. При этом отсчеты фазового сигнала ec(ti) преобразуются сигналом гетеродина ег(ti)=mod2 π[φг+Ωг(ti)] по формуле еп р(ti)=mod2 π[ес(ti)+ег(ti)].
Решающий блок символьный (РБС) 10 по преобразованным отсчетам фазового сигнала еп р(ti) «решающим правилом» определяет двоичные коды блока информации. Второй декодер блочный (ВДК) 11 выполняет помехоустойчивое декодирование и передает блок информации потребителю. Пример ВДК - декодер Рида-Соломона (R-S).
Составляющая ПФС эффекта Доплера.
Составляющая ПФС от доплеровского смещения частоты влияет на возникновение ошибок в потоке бит на уровне фазового сигнала, до образования потока бит. Составляющая ПФС образуется смещением нулевого уровня фазового сигнала от доплеровского смещения частоты и проявляется тем сильнее, чем шире спектр модулирующего сигнала и чем дальше он смещен от несущей частоты, что иллюстрируется следующим образом.
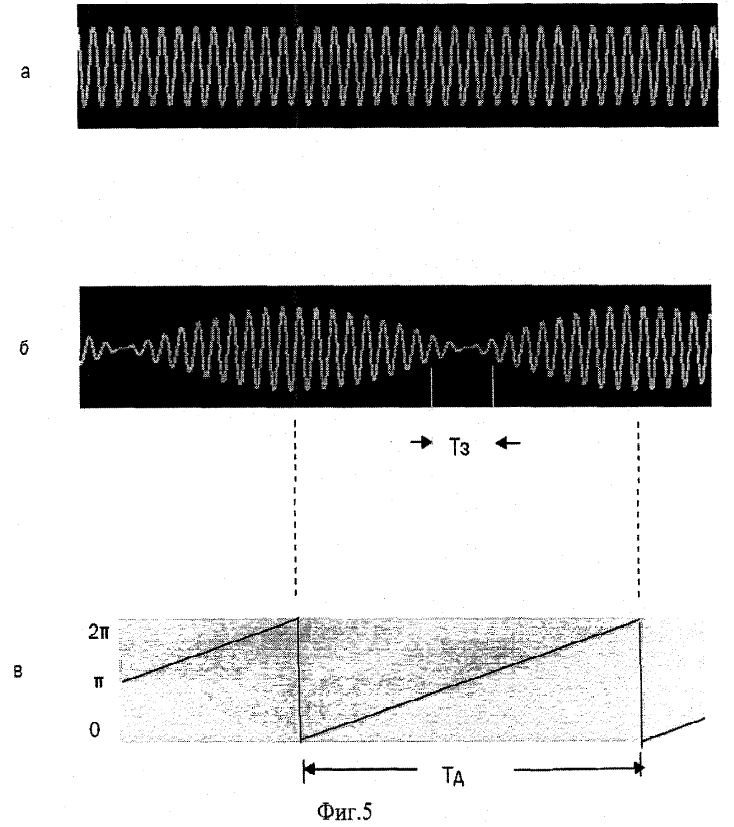
Формула доплеровского смещения частоты F∂ i=(2W/λ)cosγ i [7, стр.7], где Wcosγi - радиальная скорость КА относительно СР, λ - длина волны. Формула применима к несущей, к составляющим спектра и группам составляющих спектра. Пусть излучаются f=1/λ=11000・106 Гц - несущая частота, Fτ=40・106 Гц - средняя частота группы составляющих спектра сигналов длительности τ, Fτ o =80・106 Гц – средняя частота группы составляющих спектра сигналов длительности τо. Тогда при доплеровском смещении F=50000 Гц, на несущей частоте f, спектральные составляющие излученного сигнала f+Fτ и f+fτ o на входе приемника будут иметь значения fF τ=(11000*106+50000+181,8) Гц и fF τ o=(11000・106+50000+363,6) Гц и возникают колебания разностной частоты fF τ о-fF τ=181,8 Гц, а при автоподстройке тактовой частоты считывания по частоте fF τ о возникает смещение фазового сигнала с периодом Т∂=1/F∂=5,5 мс (см. Фиг.5), где F∂=fF τ o-fF τ.
Влияние эффекта Доплера при непрерывном излучении известно [7, с.10]. Эффект проявляется в сдвиге спектральных составляющих колебаний на доплеровскую частоту и в изменении фазы колебаний с доплеровской частотой с течением времени относительно преобразования координат неподвижной системы в подвижную. Фазаплоской волны электромагнитного поля инвариантна относительно преобразований координат одной системы в другую.
Будем рассматривать влияние эффекта Доплера для передатчика, расположенного в неподвижной системе координат. Приемник может быть в той же неподвижной системе координат или переходить в подвижную систему координат. В последнем случае он движется с постоянной скоростью в направлении к приемнику или от приемника.
Выделение информации из раиосигнала добиваются детектированием (демодуляцией). Исследование преобразования сигналов при детектировании в литературе рассматривалось на сумме двух синусоид. Показано, что при детектировании колебания х=sinω1t+ε sinω2t, где ω1 и ω2 частоты синусоид, образуется сигнал разностной частотой ω1-ω2. При сложении синусоид с разными ω1, ω2 и ε возникают биения, частота биений определяется периодом ТД повторения максимумов или минимумов результирующего колебания, при несоизмеримых частотах образующих колебаний результирующее колебание вообще не периодично. Основные виды детекторов: «линейный» детектор и квадратичный детектор. Квадратичное детектирование дает при детектировании биений результат в более сложном случае, когда амплитуды образующих колебаний не равны, т.е (ε>1 и ε≤1). Схема детектирования Костаса строится по принципу квадратичного детектирования [1,с.240].
При модуляции несущей частоты синусоидой частоты ω1 на частотной оси появляются частоты f-ω1/2π, f, f+ω1/2π.
Пусть: f=11000・106 Гц, (f-ω1/2π)=10900・106 Гц, (f+ω1/2π)=11100・106 Гц, амплитуды зеркальной составляющей (f-ωi/2π) и составляющей (f+ω1/2π) равны, а остаток несущей (f) подавлен. При частоте доплеровского смещения 50000 Гц на несущей частоте составляющие частоты примут значения смещений 49545,4 Гц и 50454,5 Гц.
Разностная частота оказывается 909 Гц. Период разностной частоты Тд=1,1 мс.
В качестве иллюстрации для равных амплитуд построен график результирующего колебания на ЭВМ(Фиг.5б), где Тз - область интерференционных замираний, при падении отношения Рс/Рш до порогового значения, информация, которой может быть модулирована несущая, принята не будет. Графики, приведенные на Фиг.5-Фиг.11, построены на ЭВМ в системе Delphi 3 Standart.
Если такты считывания отсчетов фазы фазомодулированного сигнала синхронизованы частотой (f+ω1/2π), то демодулятор фазы даст картину (Фиг.5в) с Тд=1,1 мс.
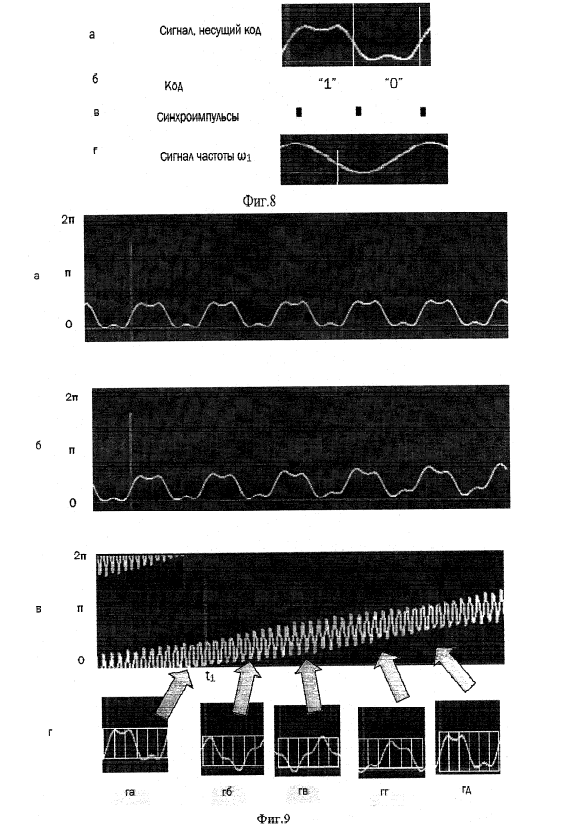
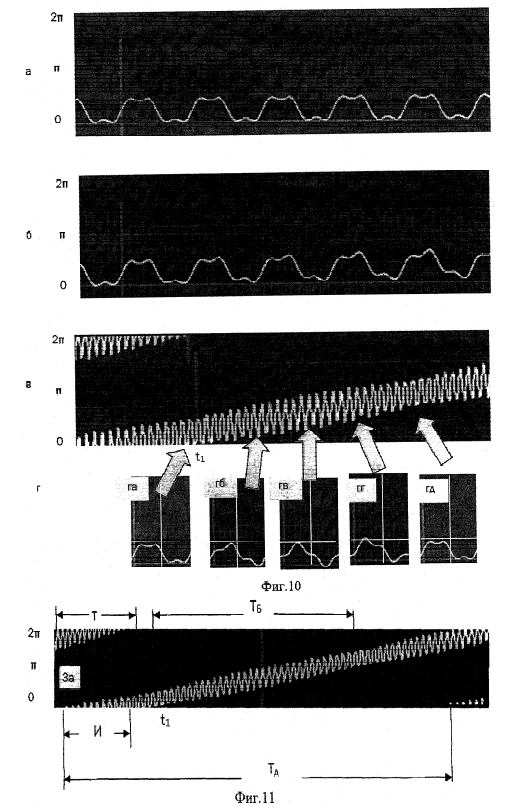
Искажения фазового сигнала при импульсной модуляции от проявления эффекта Доплера приведено на Фиг.9.
Влияние эффекта Доплера при импульсной модуляции известно [7, с.15]. Эффект проявляется в сдвиге спектра частот импульса колебаний на доплеровскую частоту и в изменении фазы колебаний с доплеровской частотой от одного периода повторения импульсов к другому относительно начальной фазы излучаемых колебаний. Изменение фазы за период повторения Δφт=ωдТп, где Тп - период повторения импульсов, ωд - доплеровская частота на приемной стороне.
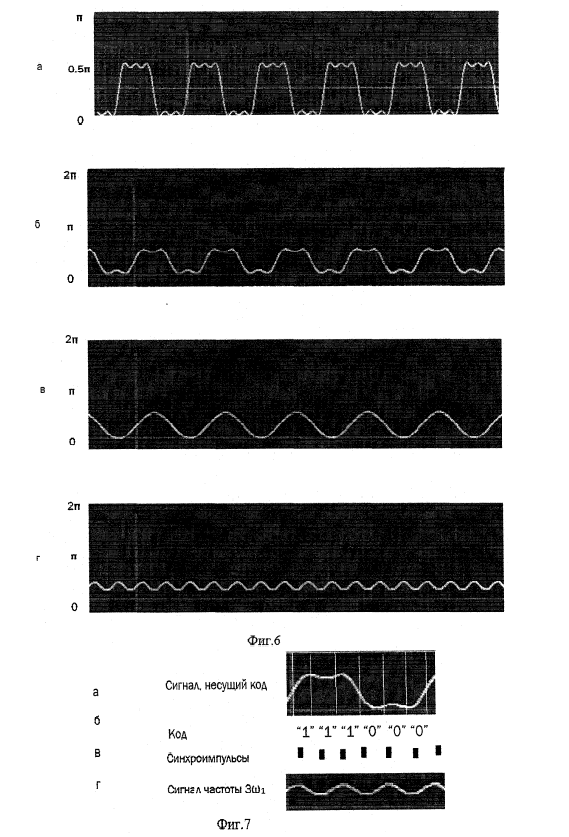
Покажем искажения фазового сигнала при непрерывной фазовой модуляции меандром. Сигнал содержит дискретные спектральные составляющие с амплитудй ск, фазой φк и постоянную составляющую со, выражающие среднее значение функции за период. Спектр дискретный. Для меандра период повторения импульсов Тп=2τ, где τ - длительность импульса. Основная модулирующая частота ω1=2π/τ. Частоты спектральных составляющих kω1. Пусть фазомодулированный сигнал передающего устройства имеет υН=0; υВ=90 град. На Фиг.6а показан сигнал, содержащий три гармоники и постоянную составляющую по формуле 1+sin(ω1)+0.3・sin(3・ω1)+0.15・sin(5・ω1). На Фиг.6 показан сигнал, содержащий две гармоники ω1 и 3ω1.
Рассмотрим два случая синхронизации импульсов частотой 3ω1 или ω1 на приемной стороне:
А - передачи бит информации в виде последовательности…111000111000…111000…, содержащей повторяющуюся последовательность, состоящую из шести символов 111000. Последовательность передается суммой двух частот ω1 и 3ω1. Синхроимпульсы бит информации образуются (на передающей и приемной стороне) от сигнала частоты 3ω1 и синхронизованы, как изображено на Фиг.7.
Б - передачи бит информации в виде последовательности …10101010…. Последовательность передается суммой двух частот ω1 и 3ω1. Синхроимпульсы бит информации образуются от сигнала частоты ω1 и синхронизованы, как изображено на фиг.8.
Для записи сигналов применены обозначения: x=ω1; (1), (0) - коэффициенты, обозначающие наличие или отсутствие составляющей сигнала; доплеровское смещение Δω частоты учитывается коэффициентом Δω/ω, записывается в виде х・(1+0,015), где 0,015=Δω/ω; фаза составляющей в момент времени t записывается в радианах при условии, что 2π соответствует периоду частоты биений. На Фиг.9в в периоде биений ТБ колебательного процесса показано 28 периодов частоты 3ω1, 168 бит информации. Для подвижной системы координат, фаза φБ=0 рад частоты биений Δω равна нулю в момет t1, вид фазового сигнала для шести первых бит показан на Фиг.9г рис.га. На Фиг.9г: рис.га; рис.гб; рис.гв; рис.гг и рис.гд показан вид фазового сигнала при значениях фаз: 0; 1,36; 3,14; 4,5 и 6,28 рад (на периоде биений 168 бит). Для частоты биений 181,8 Гц, несущей частоты 11000・106 Гц, скорости передачи бит информации - 60 Мбит/с, период биений оказывается 5,5 мс. На периоде биений будет 330・103 бит информации. При значениях фаз разностной частоты: 1,36; 3,14; 4,5 и 6,28 рад вид фазового сигнала будет, как на рис.гб; рис.гв; рис.гг и рис.гд. На фиг.11 показан фазовый согнал, имеющий колебание постоянной составляющей в подвижной системе координат, колебание постоянной составляющей с периодом ТД, биения с периодом ТБ. При уменьшении доплеровской частоты fд до нуля доплеровское смещение разностных частот составляющих спектра также уменьшается до нуля, а составляющая смещения фазового сигнала от этого пропадает.
Иллюстрация компенсации фазового сигнала блоком сдвига полосы частот (БСПЧ) 9.
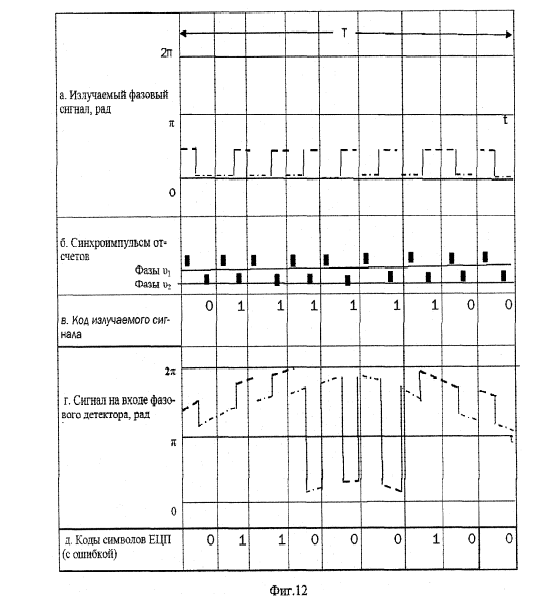
На Фиг.12а представлена реализация излучаемого фазового сигнала на интервале Т, показана (пунктирными линиями) огибающая излучаемого сигнала во временной области на отрезке Т, фазовая модуляция 0; 90°.
На Фиг.12б представлены синхроимпульсы отсчетов фазы. Предполагается, для простоты, за время информационного бита цифровой фазовый детектор снимает два отсчета фазы, первый (υ1) отсчет нулевого уровня, второй (υ2) отсчет сигнала. Для объяснения возникновения инверсий воспользуемся «решающим правилом» определения информационного бита: (υ2-υ1)>0 - бит есть, (υ2-υ1)≤0 - бита нет.
На Фиг.12в представлен код излучаемого сигнала.
На Фиг.12г представлена реализация принимаемого сигнала в смеси с ПФС. На фиг. видно, что полезный сигнал (с модуляцией 0; 90°) в сумме с помехой достигает уровня 2π и наблюдается инверсия символов.
Инверсия символов возникла на четвертом, пятом и шестом битовом символах.
На Фиг.13а представлен сигнал с выхода фазового детектора, записанный в оперативную память.
На Фиг.13б представлены синхроимпульсы отсчетов фазы.
На Фиг.13в представлен код символов блока информации, который был бы зафиксирован, если бы не было преобразований, записанных в оперативную память отсчетов.
На Фиг.13г представлено рассчитанное смещение фаз.
На Фиг.13д представлены преобразованные отсчеты фаз.
На Фиг.13е представлен код символов блока информации, полученный «решающим правилом» после выполнения алгоритма преобразования.
При заданных допустимых отношениях сигнал/шум вероятность формирования ошибок в кодах цифрового потока мала, ошибки исправляются применением декодирования. В этом задержки времени приема информации не происходит.
Задержка в появлении бит блока на втором входе получателя информации (ПИ) 6 возникает, когда блоки, обеспечивающие компенсацию, включаются в работу командой «Включено», которая вырабатывается демодулятором (ДМ) 4, что происходит при сильном влиянии эффекта Доплера, возникновении всплесков помех, в том числе от падения мощности сигнала. В результате работы БОФС и БСПЧ уменьшается количество ошибок для исправления декодером, декодирование становится эффективным и потери блоков информации радиоприемником уменьшаются.
Источники информации
1. И.М.Тепляков и др. «Радиосистемы передачи информации», М.: «Радио и связь», 1982, с.69-83, 230-234.
2. Устройство по патенту Российской Федерации №2197064 (заявка 2001105566/09 от 27.02.2007, МПК Н04В 1/10, H04L 27/22).
3. Л.Е.Варакин «Системы связи с шумоподобными сигналами», М.: «Радио и Связь», 1985, с.154, 173, 205, рис.7.1, рис.9.1.
4. Березин Л.В. и Вейцель В.А. Теория и проектирование радиосистем. «Сов. Радио», 1977, с.428.
5. Мелешков Г.А. Устройство сдвига полосы частот, по авторскому свидетельству СССР №824401, 1979.
6. Тузов Г.И. и др. Помехозащищенность радиосистем со сложными сигналами. «Радио и связь», 1985, с.186, 204.
7. Колчинский В.Е. и др. Автономные доплеровские устройства и системы навигации летательных аппаратов. «Сов. Радио», 1975, с.10-11.
Формула изобретения
1. Радиоприемник цифровой информации, содержащий последовательно соединенные полосовой фильтр, согласованный фильтр, балансный модулятор, демодулятор, декодер блочный, получатель информации, причем второй вход балансного модулятора подключен к выходу генератора шумоподобных сигналов, причем со второго выхода демодулятора снимаются отсчеты сигнала фазового детектора амплитудного, отличающийся тем, что в него введены прерыватель приема блока сигналов, вход которого подключен ко второму выходу декодера блочного, блок памяти цифровых отсчетов сигнала фазового детектора амплитудного, блок обработки фазового сигнала, выполняющего функции определения оценок компенсируемых частоты и фазы по отсчетам сигнала блока памяти, блок сдвига полосы частот, выполняющий функции компенсации паразитных фазовых смещений в записанных отсчетах сигнала блока памяти, решающий блок символьный, второй декодер блочный, причем выход прерывателя приема блока сигналов командой «Включено» открывающий работу блоков, подключен к первым входам блока обработки фазового сигнала и блока сдвига полосы частот, выход которого через последовательно соединенные решающий блок символьный и второй декодер блочный подключен ко второму входу получателя информации, второй выход демодулятора подключен к входу блока памяти, выход цифровых отсчетов которого соединен со вторым входом блока обработки фазового сигнала и третьим входом блока сдвига полосы частот, второй вход которого подключен к выходу компенсируемых частоты и фазы блока обработки фазового сигнала.
2. Радиоприемник цифровой информации по п.1, отличающийся тем, что вход демодулятора является входом фазового детектора амплитудного и входом детектора энергетического, выход которого является первым выходом демодулятора, второй выход которого подключен к выоду аналого-цифрового преобразователя, вход которого подключен к выходу фазового детектора амплитудного.
3. Радиоприемник цифровой информации по п.1, отличающийся тем, что вход демодулятора является входом второго фазового детектора амплитудного, выход которого соединен со входом аналого-цифрового преобразователя, выход которого соединен со входом второго решающего блока символьного, выход которого является первым выходом демодулятора, второй выход которого подключен к выходу аналого-цифрового преобразователя.