
Высокочастотные микрофильтры
| Вид материала | Документы |
СодержаниеМоделирование резонаторов Стержневой резонатор с продольной волной Стержневой резонатор с волной кручения Круговые и прямоугольные мембраны |
- Высокочастотные микрофильтры, 146.79kb.
- Задачи по теме Высокочастотные, 34.16kb.
- 1. общие положения, 728.02kb.
- Мощные высокочастотные транзисторы, 2370.77kb.
- Одним из важнейших направлений астрономии в течение последнего времени является обработка, 72.97kb.
- Аннотация проведенных научных исследований в 2011 г по Договору от 25 ноября 2010, 182.98kb.
- Е. А. Земская использует понятие ключевые слова единицы, которые обозначают явления, 89.78kb.
- Для сотовых сетей связи (мобильные телефоны, а также модемы, применяемые в сотовых, 307.64kb.
ВЫСОКОЧАСТОТНЫЕ МИКРОФИЛЬТРЫ
Часть 1
Миниатюризация фильтров является технически сложной задачей, которой в последние годы уделяется большое внимание. Фильтры оказывают влияние на распространение механических волн при их прохождении между входными и выходными портами. Колебания – пример таких механических волн. К этому классу устройств относятся и фильтры, работающие с акустическими волнами, которые могут рассматриваться, как разновидность механических волн. В составе некоторых фильтров нет механических компонентов, но если они изготавливаются методами микротехнологий, они также относятся к микрофильтрам. Объединяющим элементом всех микрофильтров является технология их производства.
В устройствах связи используются несколько типов фильтров. В зависимости от полосы частот, которую они пропускают, их можно разделить на:
- фильтры высоких частот,
- фильтры нижних частот,
- полосовые фильтры,
- режекторные.
Однако в большинстве случаев в устройствах связи используются полосовые фильтры с очень узкой полосой пропускания и резким спадом частотной характеристики. Далее будут приведены некоторые рабочие параметры фильтров.
Самая важная характеристика фильтра— вносимые потери, которые определяются в виде отношения сигнала на выходе фильтра к сигналу на его входе. Разработчики стремятся к минимизации этого параметра внутри полосы пропускания. Добротность фильтра Q является характеристикой его полосы пропускания, которая выражается через отношение энергий, накопленной и рассеянной в течение одного периода. Ее часто определяют в следующем виде:
 (1)
(1)где f0 – центральная частота, а Δf = f2 – f1. Отсюда видно, что добротность показывает эффективность работы фильтра в терминах его частотных характеристик. Существует еще несколько характеристик, используемых для описания фильтров:
- Спад частотной характеристики – скорость перехода передаточной характеристики фильтра из зоны пропускания в полосу подавления,
- Коэффициент подавления сигнала в полосе заграждения – сигнал, проходящий через фильтр на частотах вне его полосы пропускания. Этот коэффициент выражается в децибелах и часто соотносится с минимальным уровнем вносимых потерь.
На рис. 1 графически представлены параметры фильтра.
На рис. 2 показана схема типовой современной персональной системы связи. Такие системы способны работать со множеством каналов связи, функционирующих одновременно.
Выбор требуемого канала осуществляется при помощи полосовых фильтров. Чем больше каналов расположено внутри ограниченного частотного спектра, тем строже следующие требования к полосе пропускания фильтра:
- очень низкий уровень вносимых потерь,
- быстрый спад частотной характеристики,
- высокий коэффициент подавления сигнала вне полосы пропускания.
Для разных частотных диапазонов устройства беспроводной связи используют различные реализации фильтров. Самыми простыми фильтрами являются схемы, состоящие из сосредоточенных катушек индуктивности и конденсаторов. Но на практике такие фильтры используются в ВЧ устройствах нечасто из-за сравнительно низких значений добротности. Другой подход – применение цифровых фильтров, построенных на основе быстродействующих процессоров и современных алгоритмов цифровой обработки сигналов. Однако такие фильтры ограничены максимальной частотой выборки, что особенно сказывается на высоких частотах. Поэтому требуется разработка альтернативных схем фильтров.
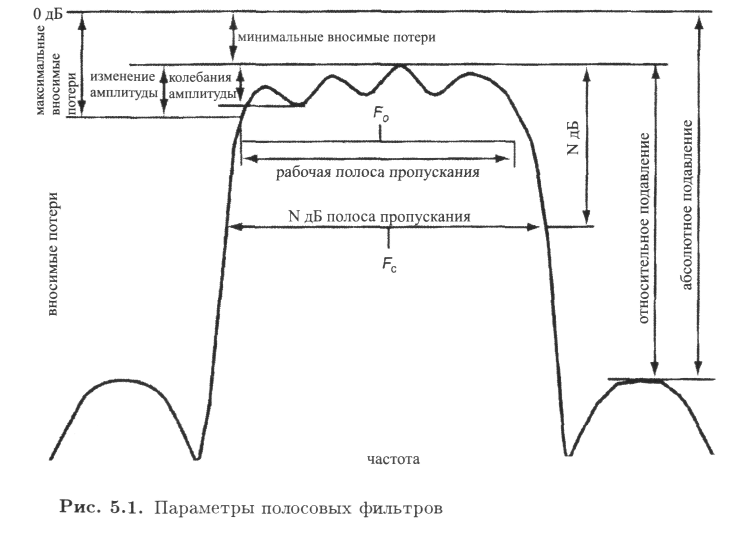
Рис. 1. Параметры фильтров

Рис. 2. Блок-схема беспроводного приемопередатчика
С самого начала развития телекоммуникационной техники для получения требуемых характеристик, например, высокой добротности, использовались различные электромеханические фильтры, которые, как правило, состоят из электромеханических преобразователей: одного на входе, другого на выходе, соединенных линией передач. Используемые механические и электромеханические компоненты обычно обладают сильным резонансом, что объясняется высокой добротностью таких фильтров. Для моделирования электромеханических фильтров чаще всего применяется эквивалентная схема, которая может быть переведена в электрическую форму для упрощения проектирования и оптимизации. Для простоты анализа предполагается, что преобразователи не имеют никаких потерь.
Высокодобротные фильтры, имеющие в своем составе механические резонансные элементы, широко используются во многих системах связи и радарах, работающих в килогерцовом частотном диапазоне. При увеличении частоты размеры фильтров уменьшаются и, в конце концов, их становится практически невозможно изготовить. Поэтому ВЧ электромеханические фильтры очень дороги и не пригодны для массового производства. Поскольку для широкого распространения современных телекоммуникационных устройств необходимо снижать их стоимость, требуется разработка принципиально новых схем, способных заменить механические фильтры.
Принципы действия механических фильтров могут быть применены к миниатюрным устройствам, способным работать на более высоких частотах. Такие фильтры работают на частотах до десятков МГц и при правильном монтаже обладают добротностью более 1000. В таких устройствах электрическая энергия превращается в форму механической энергии, например, в колебания электромеханического преобразователя на входе фильтра. Полученная механическая энергия через механическую линию передач поступает на второй электромеханический преобразователь, превращающий ее обратно в электрическую энергию. Механические и электромеханические компоненты, используемые в таких фильтрах, обычно имеют высокую частотную чувствительность. Их механический резонанс определяет рабочую полосу частот всего устройства. При небольших изменениях такие фильтры могут работать в области очень высоких частот (ОВЧ).
Существующие технологии позволяют изготавливать микрофильтры, работающие на частотах порядка 100 МГц, и планарные распределенные фильтры – до частот нескольких ГГц. Фильтры и резонаторы на поверхностных акустических волнах (ПАВ) перекрывают этот диапазон и позволяют реализовывать высокодобротные устройства с рабочими частотами до 2 ГГц. В состав таких устройств входит встречно-штыревой (гребенчатый) преобразователь (ВШП), запускающий поверхностные акустические волны по пьезоэлектрической подложке. На выходе устройства, как правило, стоит аналогичный преобразователь, превращающий акустические волны в электрические сигналы. Такие устройства очень чувствительны к изменению частоты и поэтому могут использоваться в конструкциях фильтров. В настоящее время при помощи современных методов микрообработки возможно прецизионное изготовление таких планарных устройств. Предельно допустимые характеристики рассматриваемых устройств, как правило, объясняются технологическими ограничениями. Для более высоких частот используются фильтры на объемных акустических волнах (ОАВ). Благодаря обоим типам фильтров: на ПАВ и ОАВ, стал возможным прогресс в развитии современных микросистем связи.
В ВЧ и СВЧ диапазонах для реализации фильтров широко используются распределенные компоненты. Добротность фильтров при таком подходе ограничивается паразитными эффектами. Планарные фильтры на тонких диэлектрических мембранах обладают низкими потерями и подходят для недорогих, компактных и быстродействующих монолитных СВЧ схем.
Моделирование механических фильтров
Рассматриваемые преобразователи ведут себя как резонаторы и для их анализа используются электрические и механические характеристики. Важными механическими характеристиками фильтров являются резонансная частота и добротность. Для улучшения рабочих характеристик фильтров несколько резонаторов могут объединяться вместе при помощи соединительных элементов, например, проводов. Количество используемых резонаторов сильно влияет на форму рабочих характеристик фильтра, поскольку их резонансная частота определяет центральную частоту полосы пропускания фильтра. При увеличении эквивалентной массы резонаторов или коэффициента упругости соединительных проводов происходит уменьшение полосы пропускания фильтра.
Несмотря на разную форму резонаторов, используемых в микроустройствах, понимание их принципа действия помогает при проектировании фильтров на их основе.
Моделирование резонаторов
Механические свойства резонаторов зависят от их формы, типа используемых материалов и от соответствующего вида колебаний. Существует несколько классических описаний резонансных колебаний балок, стержней, тонких пластин и дисков, полезных при разработке фильтров. В случаях, когда один из размеров резонатора сильно отличается от остальных двух, его математический анализ сравнительно прост. Для таких резонаторов несложно вывести уравнения для описания продольных, крутильных, изгибных и радиальных колебаний. Для толстых резонаторов такой анализ уже весьма непрост.
Для упрощенного анализа примем несколько предположений:
- Колебания имеют небольшую амплитуду, а зависимость деформации от напряжений является линейной;
- В системе нет внутренних потерь и внешнего затухания колебаний из-за сопротивления воздуха и т.д;
- Силой тяжести и магнитными силами можно пренебречь.
Анализ резонаторов проводится в следующей последовательности действий:
10. Составляются дифференциальные уравнения, описывающие распространение волны внутри резонатора. Они, как правило, имеют второй или четвертый порядок по пространственным координатам и второй порядок по времени.
20. Для исключения зависимости от времени уравнения решаются для синусоидальных колебаний, которые записываются в векторном виде.
30. Решения уравнений представляются в виде тригонометрических и гиперболических функций или функций Бесселя.
40. Для исключения констант в решения уравнений подставляются граничные условия. Определяются выражения частоты для разных типов волн.
50. Полученные выражения подставляются в исходное дифференциальное уравнение и находится зависимость между номером волны и частотой.
60. При помощи этой зависимости и уравнения для частоты определяется резонансная частота для различных типов волн колебаний.
70. Находится эквивалентная масса в виде эквивалентной сосредоточенной массы, помещенной в определенном месте на резонаторе, которая соответствует кинетической энергии элемента с распределенными параметрами, вибрирующего на заданном типе волны и резонансной частоте.
Стержневой резонатор с продольной волной
На рис. 3 показана схема возникновения продольной волны в тонком стержне. Материал стержня имеет плотность ρ и модуль Юнга Е. Уравнение волны в этом случае можно записать в виде:
 (2)
(2)где u показано на рис. 3. Используя векторную запись для исключения временной зависимости, найдем решение уравнения (2) в виде тригонометрических функций. Считая, что оба конца стержня свободны, уравнение для частоты будет следующим:
 (3)
(3)Из уравнения волны находится зависимость между константой распространения волны и частотой ω:
 (4)
(4)Отсюда выводится выражение для резонансной частоты:
 (5)
(5)Перемещение un(х) для n-ой волны можно записать в виде:
 (6)
(6)где А – константа.

Рис. 3. Резонатор с продольной волной колебаний
Для продольной волны в тонком стержне выражение для эквивалентной массы имеет вид:
 (7)
(7)где V0 – скорость при х = 0.
Если радиус стержня больше десятой части длины волны, в уравнении для перемещения необходимо учитывать радиальные изменения. Тогда выражение для резонансной частоты принимает вид:
 (8)
(8)Стержневой резонатор с волной кручения
На рис. 4 показана схема возникновения волны кручения в стержне. Уравнение волны в этом случае совпадает с уравнением продольной волны. Угловое перемещение и резонансная частота имеют следующий вид:
 (9)
(9) (10)
(10)где G – модуль кручения, θ0 – угловое перемещение на конце стержня. Выражение для эквивалентной массы записывается как:
 (11)
(11)
Рис. 4. Резонатор с волной кручения
Стержневой резонатор с волной изгиба
Схема возникновения волны изгиба в стержневом резонаторе показана на рис. 5. Уравнение имеет вид:
 (12)
(12)где I – изгибающий момент инерции, который для прямоугольного стержня шириной w и толщиной h равен:
 (13)
(13)а для круглого стержня радиуса а –
 (14)
(14)Если оба конца стержня свободны или, наоборот, закреплены, уравнение для частоты находится из выражения:
 (15)
(15)
Рис.5. Волна изгиба в стержневом резонаторе
Корни этого уравнения равны: к11 = 4.73, к21 = 7.853, к31 = 10.996, к41 = 14.137, ....
Дисперсионная зависимость между константой распространения волны и частотой имеет вид:
 (16)
(16)Отсюда находится выражение для резонансной частоты волны изгиба:
 (17)
(17)Уравнение для эквивалентной массы имеет следующий вид:
 (18)
(18)Резонаторы с изгибающимся диском
На рис. 6 показана схема возникновения волны изгиба в дисковом резонаторе. Ее уравнение в прямоугольных координатах имеет вид:
 (19)
(19)Это уравнение проще всего решать в цилиндрической системе координат:
 (20)
(20)Найденное выражение для частоты можно записать как:
 (21)
(21)Дисперсионная зависимость в данном случае имеет вид:
 (22)
(22)Отсюда находится выражение для резонансной частоты:
 (23)
(23)Здесь индекс s соответствует центральной волне с круговой поляризацией изгибных колебаний. Уравнение для перемещения имеет вид:
 (24)
(24) Рис.6. Волна изгиба в диске
Рис.6. Волна изгиба в дискеПри s = l эквивалентная масса определяется выражением:
 (25)
(25)Толстые диски и пластины
Дифференциальное уравнение, соответствующее колебаниям толстой круглой пластины, записывается как:
 (26)
(26)где ρ – плотность материала, h – толщина пластины, a D – ее диаметр.
Дисперсионная зависимость имеет вид:
 (27)
(27)а резонансная частота задается выражением:
 (28)
(28)Здесь αn – корни характеристического уравнения
 (29)
(29)Перемещение определяется как:
 (30)
(30)Круговые и прямоугольные мембраны
Для круговой мембраны радиуса а двумерное уравнение распространения волны в полярных координатах с началом координат в центре мембраны имеет вид:
 (31)
(31)где ρ’’ – масса на единицу площади мембраны, F' – напряжение на ее краях. Дисперсионное соотношение для этого случая записывается как:
 (32)
(32)Решение дифференциального уравнения в пространстве имеет следующий вид:
 (33)
(33)где А – произвольная константа, αm,n – значения а при Jm(αa) = 0, удовлетворяющие граничным условиям. Тогда резонансная частота задается следующим выражением:
 (34)
(34)Для первых пяти значений резонансной частоты волновые коэффициенты в уравнении (5.34) равны: α01 = 2.406, α02 = 5.52, α03 = 8.654, α04 = 11.792 и α05 = 14.931.
При применении прямоугольной мембраны дифференциальное уравнение меняется. В декартовых координатах его решение имеет вид:
 (35)
(35)где а и b – размеры мембраны в направлениях x и y, А – константа, тип положительные целые числа, которые не могут одновременно равняться нулю.
Резонансная частота определяется выражением:
 (36)
(36)Контрольные вопросы
- Характеристики и параметры полосковых фильтров.
- Моделирование резонаторов (предположения, последовательность действий).
- Стержневой резонатор с продольной волной. Схема. Математическая модель.
- Стержневой резонатор с волной кручения. Схема. Математическая модель.
- Стержневой резонатор с волной изгиба. Схема. Математическая модель.