
Мотиенко татьяна Александровна
| Вид материала | Автореферат |
- Т. А. Алексеева Основы политологии Алексеева Татьяна Александровна, 79.77kb.
- Житникова Татьяна Александровна, высшая категория урок, 38.1kb.
- Кривова Людмила Николаевна 47 Углов Александр Павлинович 51 Кузнецова Лариса Зиновьевна., 2978.78kb.
- Шкаброва Татьяна Александровна Воспитатель: Павлова Валентина Александровна с. Красные, 113.5kb.
- Учитель Жбырь Татьяна Александровна программа, 678.41kb.
- Бузикова Татьяна Александровна урок, 383.14kb.
- Реферат. Тема реферата, 16.79kb.
- Козлова Наталья Андреевна 3 4 Дейнека Татьяна, Быкова Ольга гоу «Красночикойская сош, 185.03kb.
- И. П. Павлов дата проведения, 58.09kb.
- Образовательная программа на 2009-2012 г г. Г. Москва, 1242.64kb.
На правах рукописи
МОТИЕНКО Татьяна Александровна
Прикладной метод синергетического синтеза
иерархических систем управления летательными
аппаратами
Специальность 05.13.01 –
«Системный анализ, управление и обработка информации»
(вычислительная техника и информатика)
АВТОРЕФЕРАТ
диссертации на соискание ученой степени
кандидата технических наук
Таганрог – 2011
Работа выполнена на кафедре Синергетики и Процессов Управления Технологического института Южного федерального университета в г. Таганроге (ТТИ ЮФУ)
Научный руководитель: доктор технических наук, доцент
Г.Е.Веселов
Официальные оппоненты: доктор технических наук, профессор
И.М. Першин
кандидат технических наук, инженер-конструктор 1-й категории ОАО «ТАНТК им. Г.М. Бериева» А.И. Никитин
Ведущая организация: Институт проблем управления им. В. А. Трапезникова РАН, г. Москва
Защита диссертации состоится «24» ноября 2011 г. в 14 час. 20 мин. на заседании диссертационного совета Д 212.208.22 в ТТИ ЮФУ по адресу: 347928, г. Таганрог, пер. Некрасовский, 44, ауд. Д-406.
С диссертацией можно ознакомиться в библиотеке ЮФУ.
Автореферат разослан «__» октября 2011 г.
Ученый секретарь
диссертационного совета
д.т.н., профессор А.Н. Целых
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность проблемы. Согласно современным мировоззренческим представлениям, весь мир представляет собой сложную структуру, состоящую из огромного количества развивающихся подсистем и систем различных классов. Развитие науки и техники влечет за собой возникновение все более сложных структур, которые динамически взаимодействуют друг с другом, обмениваясь энергией, веществом и информацией.
Одним из ярких примеров сложных структур является система автоматического управления движением летательного аппарата (ЛА). В настоящее время существует огромное множество автопилотов различных классов, однако проблема синтеза высокоточных и быстродействующих регуляторов остается одной из актуальнейших задач теории и практики управления пространственным движением ЛА.
Существенный вклад в развитие теории и практики методов управления пространственным движением ЛА был сделан рядом ведущих ученых как в России, так и за рубежом. Так, постановка задачи Летова-Калмана была проиллюстрирована конструктивными результатами и привела к большому числу работ по синтезу регуляторов для объектов различных классов, в том числе и для ЛА. В ряде работ подобная задача расширена для нелинейных объектов. Задачи пространственной ориентации, в нелинейной постановке, успешно решены в рамках метода обратных задач динамики. Алгоритмы, синтезированные на основе данного метода, имеют нетрадиционные структуры и придают системам естественные свойства адаптивности – слабой чувствительности к измерению параметров и возмущающим силам. Научной школой А.А. Красовского были развиты методы аналитического конструирования автопилотов для разных классов летательных аппаратов на основе функционала обобщенной работы (ФОР). В работах В.Н. Букова показано эффективное применение метода ФОР с использованием прогнозирующей модели процесса управления. Развиваемые в последнее время различные методы и подходы к построению законов управления нелинейными объектами различных классов отражены в известных трудах И.В. Мирошника, В.О. Никифорова, А.Л. Фрадкова и др., где, в частности, предложены методы адаптивного управления пространственным движением ЛА.
Все возрастающий интерес к системам управления сложными многомерными структурами обусловлен, прежде всего, проблемой синтеза многосвязных объектов, усложнением технологических структур систем подобного класса, а так же повышением требований к качеству функционирования таких систем.
Разрабатываемые ранее системы автоматического управления ЛА различных классов назначения не исследовали сложные объекты в виде структур, помогающих представить исходную систему в виде совокупности иерархически расположенных взаимодействующих подсистем. Однако, чем сложнее объект, тем выше порядок уравнений, описывающих его поведение. Порой количество этих уравнений настолько огромно, что синтез законов управления известными методами становится практически невозможным. Что удивительно, «проклятие размерности», на которое сетовал еще Р. Беллман, не является проблемой для природных систем, несмотря на всю сложность организации протекающих в них процессов. Очевидно, что в антропогенных системах должен так же существовать подход, при котором высокая размерность объекта управления будет рассматриваться скорее как достоинство, чем недостаток. В связи с этим, одним из самых эффективных методов преодоления «проклятие размерности», является принцип иерхаризации, согласно которому каждая сложная система может быть представлена в виде совокупности локальных систем, которые находятся в тесном взаимодействии друг с другом. Каждая из таких систем может содержать внутри себя несколько уровней иерархии, причем, поступающая на верхний уровень информация, конкретизируется на нижнем.
Мощным витком в развитии задач анализа и синтеза систем управления такими сложными объектами как ЛА, стала концепция синергетической теории управления (СТУ), разработанная и развиваемая школой А.А. Колесникова. Базовым методом данной теории является метод аналитического конструирования агрегированных регуляторов (АКАР), который позволяет рассматривать полные нелинейные модели объектов, не требуя упрощений и линеаризации. Использование синергетического подхода позволяет разрабатывать принципиально новые астатические нелинейные регуляторы, обеспечивающие асимптотическую устойчивость объектов управления, робастность к изменению нагрузки, а также инвариантность к внешним возмущениям.
Таким образом, тема диссертации – разработка синергетического метода синтеза иерархического управления движением ЛА общего назначения является актуальной.
Целью работы является разработка прикладного метода синергетического синтеза иерархических систем управления летательными аппаратами – аналитическое конструирование законов иерархического управления пространственным движением ЛА, учитывающих их естественные динамические свойства на всех уровнях иерархии.
Направление исследований. В соответствии с поставленной целью в работе решена следующая совокупность основных задач.
- Структурирована исходная модель поведения ЛА в виде иерархически упорядоченных взаимодействующих подсистем.
- Сформулированы принципы формирования совокупности целей и их иерархического структурирования в соответствии со сформированной многоуровневой организацией.
- Разработан астатический нелинейный регулятор для подсистемы нижнего уровня, обеспечивающий асимптотическую устойчивость рулевого привода, робастность к изменению коэффициента шарнирной нагрузки, а также инвариантность к внешним возмущениям.
- Разработана общая процедура синтеза законов иерархического управления для выбранного ЛА.
Методы исследования. Для решения поставленных в диссертации задач использовались методы математического моделирования, аэродинамики, современной нелинейной динамики, синергетической теории управления, теории дифференциальных уравнений, а так же прикладная теория и методы синергетического синтеза иерархических систем управления. При проведении этапов синтеза и моделировании использовались прикладные математические пакеты Maple и MatLab.
Обоснованность научных положений и достоверность результатов исследований подтверждается согласованностью результатов теоретических исследований и компьютерного моделирования иерархических систем.
Научная новизна. В работе получены и выносятся на защиту основные результаты, характеризующиеся научной новизной.
- Процедура иерархического синтеза систем управления летательными аппаратами.
- Синергетический синтез стратегий управления основными типами исполнительных устройств.
- Процедура синтеза синергетических законов иерархического управления пространственным движением ЛА.
Практическая ценность работы. Полученные в диссертационной работе результаты позволяют приступить к непосредственной практической реализации иерархической системы управления пространственным движением летательных аппаратов различных классов назначения.
Реализация результатов. Полученные в диссертации научные и прикладные результаты нашли применение в ООО "КБ "СПЕКТР - АЭРО" при разработке нового пилотажно-навигационного комплекса, а также в учебном процессе кафедры синергетики и процессов управления Таганрогского технологического института Южного федерального университета (ТТИ ЮФУ).
Апробация работы. Научные и прикладные результаты диссертационной работы докладывались и обсуждались на: Международной научной конференции «Системный синтез и прикладная синергетика (ССПС–2009), г. Пятигорск; Неделя науки-2008 , г. Таганрог; Всероссийской НТК с международным участием: “Компьютерные и информационные технологии в науке, инженерии и управлении” (КомТех-2009) г. Таганрог; 3-ей Мультиконференции по проблемам управления, г. Таганрог; Acta Avionica, Volume XI, Slovac Republic, 2009; International Conference, 1 - 4 June 2010 Chania Crete Greece; 4th Chaotic Modeling and Simulation International Conference in Agios Nikolaos, Crete, Greece, May 31-June 3, 2011 (CHAOS 2011); 4-й Международной научной конференции «Системный синтез и прикладная синергетика (ССПС – 2011) г. Пятигорск.
Публикации. Всего соискателем по теме диссертации опубликовано 13 печатных работ, из них 3 в изданиях, входящих в перечень ВАК.
Структура и объем диссертации. Диссертация состоит из введения, четырех глав, заключения, списка литературы, содержащего 138 наименований, и двух приложений. Содержание диссертации изложено на 146 страницах и содержит 55 рисунков и 2 таблицы.
ОСНОВНОЕ СОДЕРЖАНИЕ РАБОТЫ
Во введении обоснована актуальность работы, кратко изложены теоретические и практические результаты работы, представлена их научная новизна и практическая значимость, сформулированы основные положения, выносимые на защиту.
В первой главе рассмотрены проблемы синтеза нелинейных систем управления ЛА. Произведен краткий обзор наиболее распространенных автопилотов, выпускаемых в России и за рубежом, а так же методов, на основе которых строятся системы подобного класса. Результаты произведенного обзора позволили сделать вывод о том, что проблема создания высокоточных регуляторов для автопилотов является актуальной.
Отмечено, что методы, лежащие в основе создаваемых законов, должны максимально точно описывать поведение объекта в различных режимах работы. Кроме того, синтезируемые законы управления должны обеспечивать подавление внешних возмущений. Для решения поставленной задачи был выбран метод АКАР в рамках синергетической теории управления. Применение данного метода позволяет синтезировать регулятор на основе полной нелинейной модели движения ЛА аппарата, а использование принципа иерхаризации систем управления помогает избежать дополнительного усложнения математических моделей, разбивая исходную многосвязную систему на ряд более простых подсистем, находящихся в тесном взаимодействии.
Во второй главе рассмотрена иерархия регуляторов для задач управления пространственным движением ЛА. Приведены наиболее распространенные подходы декомпозиционных методов, выделены функциональная и временная декомпозиции, позволяющие создавать наиболее гибкие законы управления. На рис.1 представлена функциональная декомпозиция задачи синтеза законов управления пространственным движением ЛА.
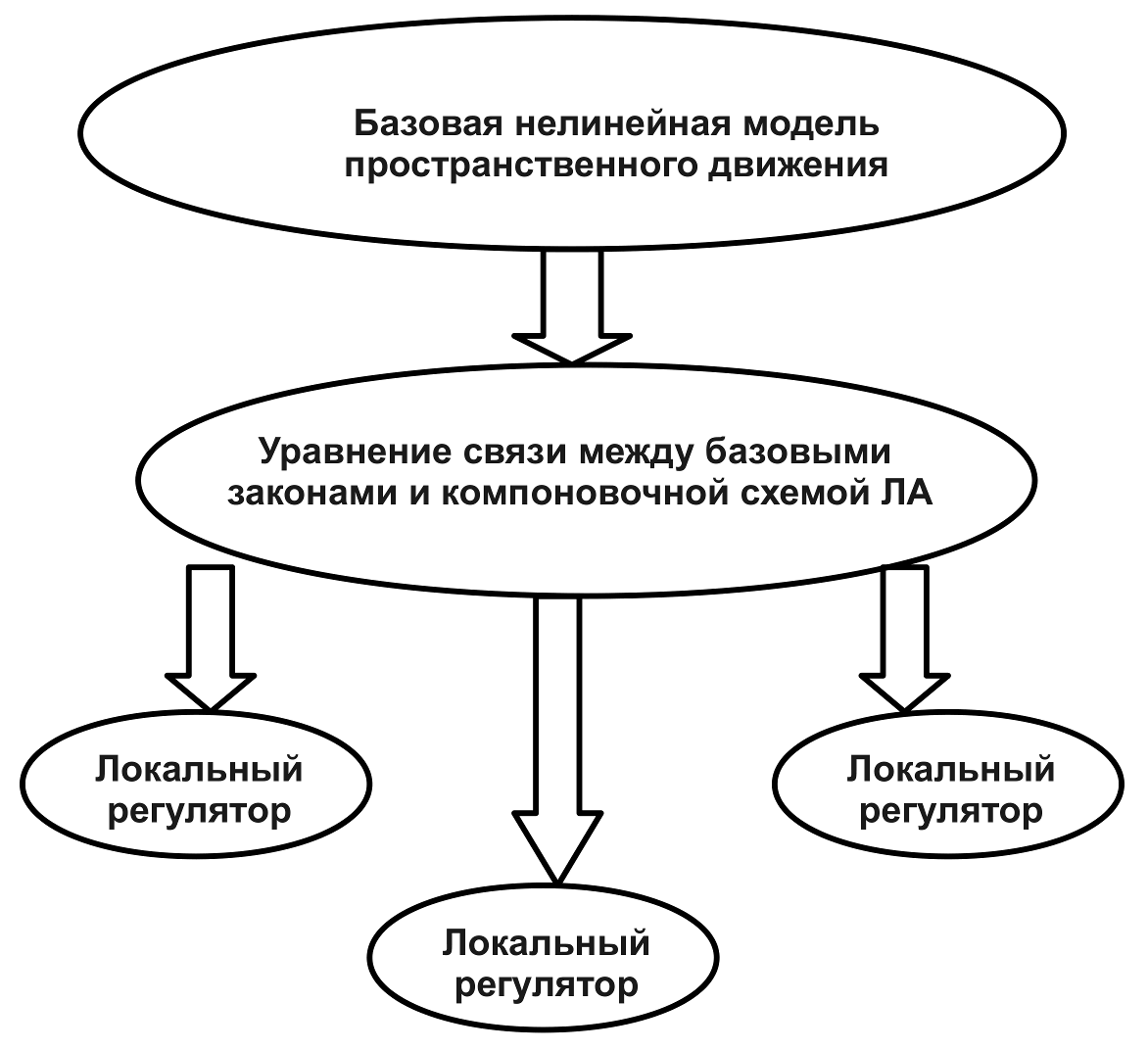
Рис.1
Следуя принципу иерхаризации регуляторов, рассмотрены вопросы математического описания движение ЛА как твердого тела. Перечислены системы координат, наиболее часто применяемые в динамике полета ЛА, приведен общий вид уравнений движения, а так же сил и моментов, действующих на объект управления.
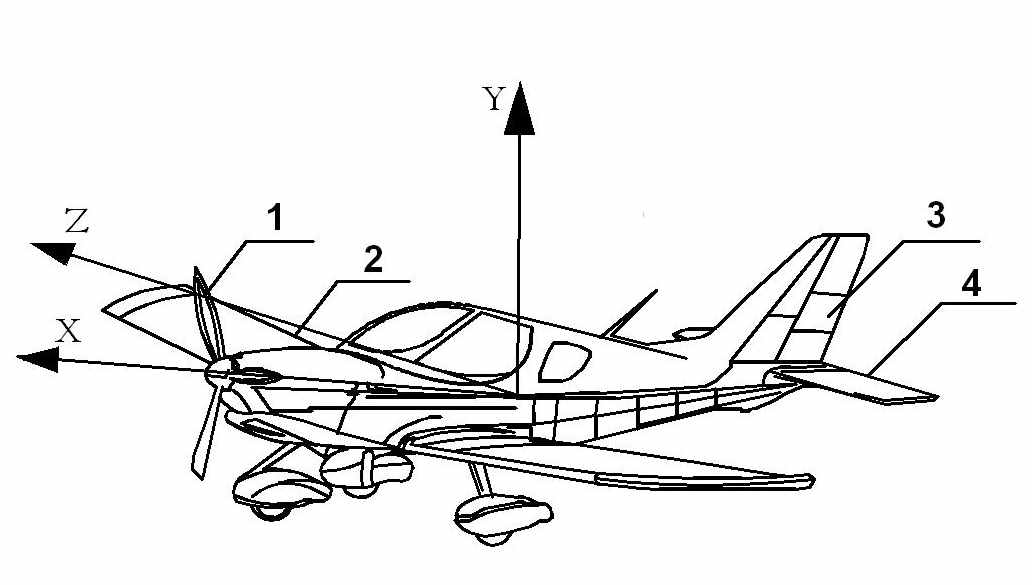
Рис.2.
В соответствии с компоновочной схемой легкого самолета РЛЭ СП (рис.2) записаны выражения для аэродинамических коэффициентов.
Разработана обобщенная методика построения иерархической системы управления движением ЛА которую в общем случае, можно сформулировать следующим образом.
Пусть поведение подсистем верхнего уровня описывается следующими уравнениями:
 | (1) |
где
 – вектор состояния подсистем верхнего уровня;
– вектор состояния подсистем верхнего уровня;  – вектор выхода;
– вектор выхода;  – вектор управляющих сил и моментов;
– вектор управляющих сил и моментов;  – вектор возмущающих сил;
– вектор возмущающих сил;  ,
,  ,
,  ,
,  – функциональные матрицы состояния, входа, выхода и возмущения.
– функциональные матрицы состояния, входа, выхода и возмущения. Поскольку управление полетом осуществляется путем изменения моментов аэродинамических сил, действующих на самолет посредством отклонения управляющих поверхностей самолета и изменения работы двигателя, на среднем уровне происходит конкретизация зависимостей законов управления от углов отклонения управляющих поверхностей, что позволяет сформировать цели для подсистем среднего уровня:
 | (2) |
где
 – вектор задающих воздействий для подсистем нижнего уровня.
– вектор задающих воздействий для подсистем нижнего уровня.Поведение каждой из подсистем приводов может быть описано следующими выражениями:
 | (3) |
где
 – вектор состояния j-й подсистемы приводов,
– вектор состояния j-й подсистемы приводов, – выходная переменная (угол) j-й подсистемы приводов,
– выходная переменная (угол) j-й подсистемы приводов,  – вектор управляющих воздействий j-й подсистемы,
– вектор управляющих воздействий j-й подсистемы,  и
и  – матрицы состояния входа и выхода.
– матрицы состояния входа и выхода.На первом этапе синтеза необходимо определить множество целей для подсистем нижнего уровня. Для оценки внешних возмущений, действующих на ЛА в реальных условиях, необходимо расширить исходную систему путем введения дополнительной переменной
 . . | (4) |
На следующем этапе, согласно стандартной процедуре метода АКАР на основе сформированных подмножеств вводится совокупность инвариантных многообразий
 , которые должны удовлетворять решению однородных дифференциальных уравнений вида:
, которые должны удовлетворять решению однородных дифференциальных уравнений вида:  | (5) |
Матрица
 такова, что решение является асимптотически устойчиво.
такова, что решение является асимптотически устойчиво.Процедуру синергетического синтеза, согласно методу АКАР, для подсистем приводов необходимо продолжать, пока замкнутая система не попадет в область притяжения инвариантных многообразий, на которых будет обеспечиваться требуемое значение угла отклонения соответствующих рабочих поверхностей:
 | (6) |
Таким образом, во второй главе разработана обобщенная методика построения иерархической системы управления движением ЛА, согласно которой на верхних уровнях иерархической системы происходит формирование совокупности решений, направленных на достижение поставленной задачи управления. На среднем уровне иерархии происходит конкретизация поставленных целей, формируются связи, описывающие зависимость отклонения рабочих органов от состояния объекта. При этом средний уровень является «связующим» для подсистемы верхнего уровня и локальных приводов. Поскольку управление полетом осуществляется путем изменения моментов аэродинамических сил, действующих на самолет посредством отклонения управляющих поверхностей самолета и изменения работы двигателя, на среднем уровне происходит конкретизация зависимостей законов управления от углов отклонения управляющих поверхностей. Эти задания формируются в виде требований к подсистемам нижнего уровня, где регуляторы формируют программы управления для электрических, гидравлических и пневматических приводов рулевых машинок, реализующие заданные отклонения управляющих поверхностей.
В третьей главе разработаны стратегии синтеза регуляторов для основных типов приводов, применяемых в работе ЛА. Синтезированные законы управления электрогидравлическими (ЭГП) и электропневматическими (ЭПП) имеют много общих черт, поскольку при разработке систем управления приводами данного типа используется двухуровневая иерархия регуляторов, когда электромеханический преобразователь (ЭМП) вырабатывает необходимое управляющее напряжение, которое зависит от требуемого перемещения рабочего органа соответствующего привода (рис. 3).
Приведем основные моменты стратегии синтеза на примере ЭГП.
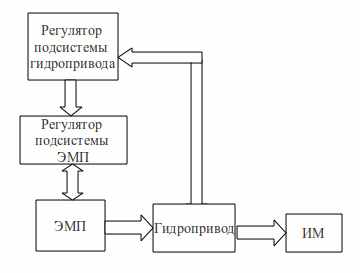
Рис. 3
Согласно разработанной стратегии иерархического синтеза, на первом этапе необходимо провести синтез подсистемы ЭМП.
   | (7) |
Математическая модель ЭМП (7) является линейной, поэтому для синтеза регулятора достаточно будет ввести одну макропеременную
 | (8) |
и соответствующее ей функциональное уравнение
 . . | (9) |
Откуда находим закон управления подсистемы ЭМП:
 , , | (10) |
переводящий изображающую точку (ИТ) замкнутой подсистемы ЭМП в окрестность многообразия
 , где поведение этой подсистемы описывается декомпозированной системой дифференциальных уравнений:
, где поведение этой подсистемы описывается декомпозированной системой дифференциальных уравнений:   . . | (11) |
Свернув систему (11) относительно переменной
 . . | (12) |
Регулятор подсистемы гидропривода необходимо синтезировать таким образом, чтобы закон управления обеспечивал подавление возмущений. Расширенная математическая модель подсистемы гидропривода, учитывающая влияние внешних возмущений, имеет вид:
 | (13) |
где
 – динамическая переменная синтезируемого регулятора, представляющая собой интеграл от инвариантов
– динамическая переменная синтезируемого регулятора, представляющая собой интеграл от инвариантов  ;
;  .
.Применительно к модели синергетического синтеза (13) последовательно введем макропеременные
 , ,  | (14) |
и соответствующие им функциональные уравнения:
 , , | (15) |
из которых, согласно стандартной процедуре метода АКАР, найдем значения для управляющего воздействия ЭГП, которые ввиду своей громоздкости в автореферате не приводятся.
Особое внимание в главе 3 уделено работе асинхронных электроприводов (АЭП) в качестве исполнительных механизмов в системах управления движением ЛА, поскольку именно этот тип приводов предлагается использовать в качестве исполнительных механизмов в системе управления легким ЛА РЛЭ СП.
Расширенна модель АЭП с учетом действующих на нее возмущений имеет вид:
 | (16) |
Согласно методу АКАР, введем совокупности макропеременных:
  | (17) |
которые должны удовлетворять решениям систем дифференциальных уравнений вида:
| . | (18) |
Следуя процедуре синтеза метода АКАР, из уравнений (17) и (18), с учетом модели (16) можно найти выражения для управляющих воздействий АЭП.
Таким образом, использование синергетического подхода позволяет разработать принципиально новые астатические нелинейные регуляторы, гарантирующие асимптотическую устойчивость рулевого привода, робастность к изменению коэффициента шарнирной нагрузки, а также инвариантность к внешним возмущениям.
В четвертой главе предлагается рассмотреть несколько прикладных задач реализации стратегий синергетического синтеза иерархического управления, решаемых для легкого ЛА РЛЭ СП.
В качестве первой задачи рассматривается частный случай реализации стратегии иерархического управления движением ЛА РЛЭ СП в продольной плоскости. Иерархия регуляторов показана на рис. 4.

Рис. 4
Модель синтеза с учетом уравнений связи среднего уровня, а так же возмущающих воздействий имеет вид:
 | (19) |
Поставим задачу определить вектор управления как функцию координат состояния системы, обеспечивающий продольное движение ЛА с заданной скоростью на заданной высоте:
Введем последовательность инвариантных многообразий:
  | (20) |
которые, согласно методу АКАР, должны удовлетворять решению систем дифференциальных уравнений вида:
 | (21) |
Из уравнений (20), (21) с учетом математической модели (19) можно найти значения для управляющих воздействий подсистемы тяги двигателя, а так же для подсистемы отклонения руля высоты.
Результаты моделирования приведены на рис. 5-17.
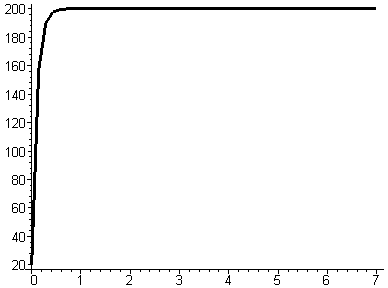 Рис.5 | 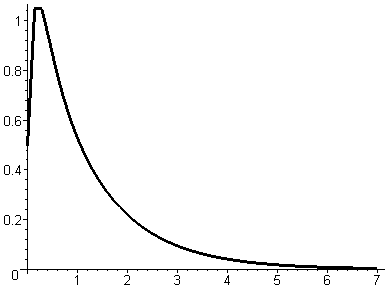 Рис.6 | 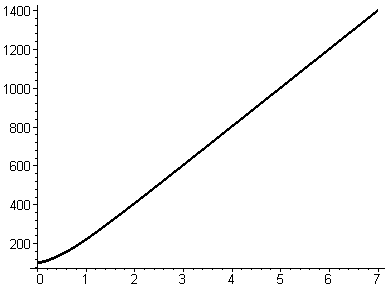 Рис.7 | 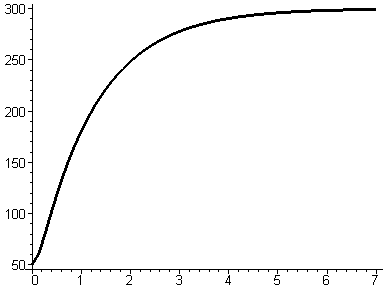 Рис.8 |
| Переходные процессы относительно земной скорости, угла наклона траектории, дальности и высоты полета | |||
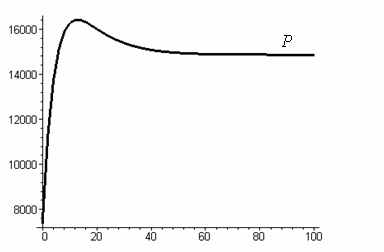 Рис.9 | 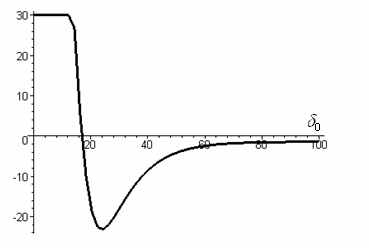 Рис.10 | 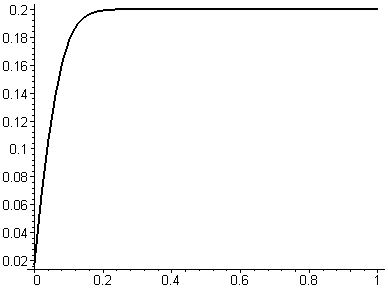 Рис.11 | 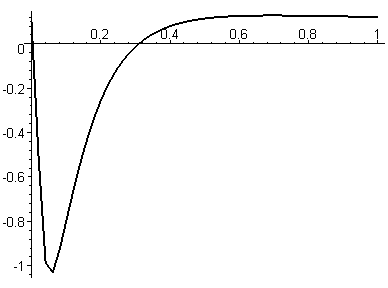 Рис.12 |
| Переходные процессы относительно тяги двигателя, угла отклонения руля высоты, вектора потокосцепления ротора и угла отклонения руля высоты | |||
Иерархия регуляторов для случая базовой нелинейной модели ЛА РЛЭ СП показана на рис. 13.

Рис.13
 | (22) |
Уравнения (22) являются расширенной базовой моделью синтеза с учетом сравнений связи среднего уровня иерархии и возмущающих воздействий.
Инвариантами системы (22) являются:
 | (23) |
Согласно стандартной процедуре метода АКАР, введем последовательности многообразий:
  | (24) |
и соответствующие им системы дифференциальных уравнений вида:
 | (25) |
причем
 ,
,  системы (25) асимптотически устойчиво при всех
системы (25) асимптотически устойчиво при всех  .
.Из совместного решения систем уравнений (24), (25) с учетом модели (22) находятся выражения для внутренних управлений, которые ввиду своей громоздкости в автореферате не приводятся.
Результаты моделирования замкнутой иерархической системы приведены на рис. 14 – 19.
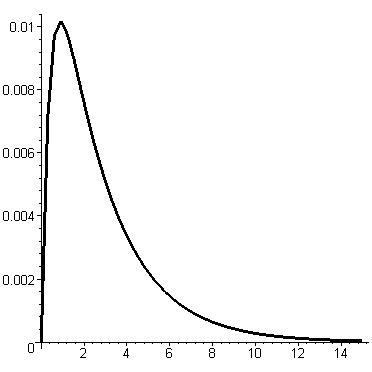 Рис.14 | 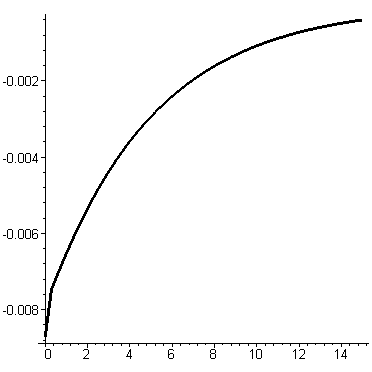 Рис.15 | 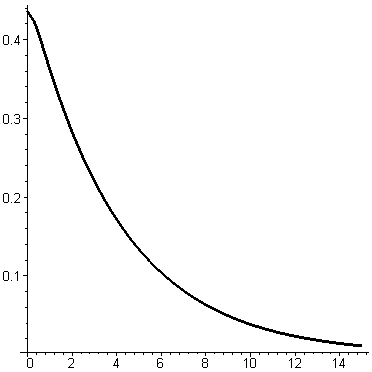 Рис.16 |
| Переходные процессы относительно углов тангажа, крена и рысканья | ||
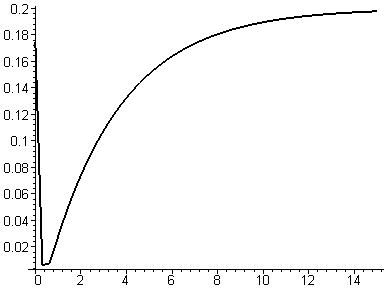 Рис.17 | 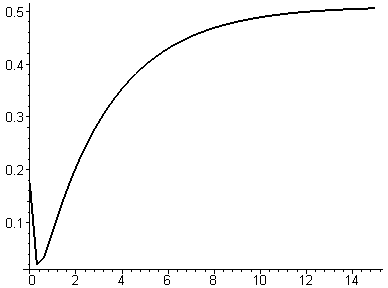 Рис.18 | 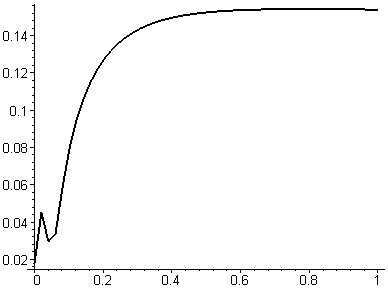 Рис.19 |
Переходные процессы относительно векторов потокосцепления ротора
Проведенное компьютерное моделирование подтверждает теоретические выводы об асимптотической устойчивости, робастности и инвариантности к внешним возмущениям синтезированных иерархических систем.
В заключении к диссертации приводятся перечень основных научных и прикладных результатов, полученных в процессе разработки синергетического синтеза иерархических систем.
ЗАКЛЮЧЕНИЕ
В данной работе предложен прикладной метод синергетического синтеза иерархических систем управления ЛА. Отличительной особенностью предлагаемого метода является то, что применение синергетического подхода позволяет провести естественную динамическую декомпозицию сложной многомерной многосвязной системы на множество взаимодействующих подсистем, кроме того, в результате синтеза каждая из подсистем «погружается» на пересечение соответствующих локальных аттракторов, которые отражают конкретное подмножество целей, а вся система в целом погружается в глобальный аттрактор, отражающий исходное множество целей.
Разработанный метод синергетического синтеза иерархических систем управления движением легких ЛА, является приложением метода (АКАР) и прикладной теории, а так же методов синергетического синтеза иерархических систем управления, позволяющих сочетающих в себе высокую универсальность и адекватность реальному объекту управления.
Основные результаты работы.
- Структурирована исходная модель поведения ЛА в виде иерархически упорядоченных взаимодействующих подсистем.
- Сформулированы принципы формирования совокупности целей и их иерархического структурирования в соответствии со сформированной многоуровневой организацией.
- Разработаны стратегии синтеза астатических регуляторов для основных типов приводов, применяемых в работе ЛА.
- Реализован прикладной метод синергетического синтеза иерархических систем управления легкими ЛА.
Полученные в диссертационной работе результаты позволяют приступить к непосредственной разработке иерархической системы управления пространственным движением для конкретного класса летательных аппаратов заданной аэродинамической схемы и компоновки.
СПИСОК ПУБЛИКАЦИЙ ПО ТЕМЕ ДИССЕРТАЦИИ
Публикации в изданиях, рекомендованных ВАК РФ:
- Мотиенко Т.А. Синергетический подход к управлению электрогидравлическим рулевым приводом. //Известия ЮФУ. Технические науки. Тематический выпуск: «Компьютерные и информационные технологии в науке, инженерии и управлении». – Таганрог: Изд-во ТТИ ЮФУ, 2009. №2 (91). – C.193– 197.
- Мотиенко Т.А. Синергетический синтез астатических законов управления движением ЛА. //Известия ЮФУ. Технические науки. Тематический выпуск: «Компьютерные и информационные технологии в науке, инженерии и управлении». – Таганрог: Изд-во ТТИ ЮФУ, 2011. №5 – С. 124–129.
- Мотиенко Т.А. Синергетический синтез систем иерархического управления легким самолетом. //Известия ЮФУ. Технические науки. Тематический выпуск: «Системный синтез и прикладная синергетика (ССПС – 2011)». – Таганрог: Изд-во ТТИ ЮФУ, 2011. №6 – С. 140–152.
Публикации в других изданиях:
- Мотиенко Т.А. Синергетический подход к управлению исполнительными механизмами летательных аппаратов. Системный синтез и прикладная синергетика // Международная научная конференция 29.09-02.10.2009 г. Пятигорск. Сборник докладов. Пятигорск, Рекламно-информационное агентство на КМВ. 2009. C. 139– 142.
- Мотиенко Т.А. Рулевые приводы летательных аппаратов. Неделя науки -2008: Сб. Тезисов. Том 2. – Таганрог: изд-во ТТИ ЮФУ, 2008. C. 437– 441.
- Gennady E. Veselov Tatiana A.Motienko. Synergetics syntethis of control systems by aircraft operation units (Синергетический синтез систем управления исполнительными органами летательных аппаратов) //Acta Avionica N. 18, Volume XI, 2009. – Pp. 133 – 139.
- Gennady E. Veselov, Tatiana A. Motienko. Synthesis of nonlinear control systems by aircraft operation units: synergetics approach (Синтез нелинейных систем управления исполнительными органами летательных аппаратов: синергетический подход) //Book of Abstract of 3rd Chaotic Modeling and Simulation International Conference (CHAOS2010), Greece. –2010. – Pp. 94.
- Motienko Tatiana A. Synergistics approach to aircraft actuators control (Синергетический подход к управлению исполнительными органами летательных аппаратов) //Book of Abstract of 4rd Chaotic Modeling and Simulation International Conference (CHAOS2011), Greece. –2011. – Pp. 97.
- Мотиенко Т.А. Синергетический подход к проблеме управления движением ЛА. Сборник докладов международной молодежной конференции «Гагаринские чтения XXXVII». М.: Физматлит, 2011. –Т. 9. – С. 247.
- Мотиенко Т.А. Синергетический синтез законов векторного управления легким самолетом в режиме взлета. Тезисы докладов VII ежегодной научной конференции студентов и аспирантов базовых кафедр Южного научного центра РАН. Ростов-на-Дону: Изд-во ЮНЦ РАН, 2011. – С. 147.
- Мотиенко Т.А. Синергетический синтез законов управления пространственным движением легких самолетов. Труды Конгресса по интеллектуальным системам и информационным технологиям «AIS-IT’10». Научное издание в 4-х томах. – М.: Физматлит, 2010. –Т. 3. – С. 308 – 314.
- Мотиенко Т.А. Синергетический синтез законов иерархического управления пространственной ориентацией летательных аппаратов. Материалы 6-й научной конференции «Управление и информационные технологии» (УИТ-2010). – СПб.: «Концерн «ЦНИИ «Электроприбор», 2010. – С. 116 – 122.
- Мотиенко Т.А. Синергетическое управление системами пространственной ориентации летательного аппарата. Сборник материалов X Всероссийской конференции «Техническая кибернетика, радиоэлектроника и системы управления». – Таганрог: Изд-во ТТИ ЮФУ, 2010. – Т.2. – С. 112-113.
Личный вклад в работах [6, 7] заключается в разработке прикладного метода синергетического синтеза систем управления ЛА.
Соискатель Т.А. Мотиенко
ЛР № 020565 от 20.10.2011 г.
Подписано в печать Формат 60х84 1/16
Бумага офсетная. Печать офсетная. Усл. п.л. – 1
Тираж экз. Заказ №
Издательство Таганрогского государственного радиотехнического
университета
ГСП 17 А, Таганрог – 28, Некрасовский, 44.