Российская федерация федеральная служба по интеллектуальной собственности, патентам и товарным знакам
| Вид материала | Документы |
СодержаниеСпособ и устройство управления точностью обработки деталей |
- Российская федерация федеральная служба по интеллектуальной собственности, патентам, 56.11kb.
- Российская федерация федеральная служба по интеллектуальной собственности, патентам, 18.96kb.
- Российская федерация федеральная служба по интеллектуальной собственности, патентам, 520.15kb.
- Российская федерация федеральная служба по интеллектуальной собственности, патентам, 92.21kb.
- Российская федерация федеральная служба по интеллектуальной собственности, патентам, 31.66kb.
- Российская федерация федеральная служба по интеллектуальной собственности, патентам, 35.17kb.
- Российская федерация федеральная служба по интеллектуальной собственности, патентам, 73.08kb.
- Российская федерация федеральная служба по интеллектуальной собственности, патентам, 72.99kb.
- Российская федерация федеральная служба по интеллектуальной собственности, патентам, 59.93kb.
- Российская федерация федеральная служба по интеллектуальной собственности, патентам, 38.13kb.
| РОССИЙСКАЯ ФЕДЕРАЦИЯ  ФЕДЕРАЛЬНАЯ СЛУЖБА ПО ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ, ПАТЕНТАМ И ТОВАРНЫМ ЗНАКАМ | (19) | RU | (11) | 2379169 | (13) | C2 | | |
| (51) МПК B23Q15/00 (2006.01) | ||||||||
| (12) ОПИСАНИЕ ИЗОБРЕТЕНИЯ К ПАТЕНТУ
| ||||||||
| (21), (22) Заявка: 2008109406/02, 11.03.2008 (24) Дата начала отсчета срока действия патента: 11.03.2008 (43) Дата публикации заявки: 20.09.2009 (46) Опубликовано: 20.01.2010 (56) Список документов, цитированных в отчете о поиске: RU 2309034 C1, 27.10.2007. RU 2239522 C1, 10.04.2004. RU 2288808 C1, 10.12.2006. JP 8268548 A, 15.10.1996. Адрес для переписки: 305040, г.Курск, ул. 50 лет Октября, 94, ГОУ ВПО Курский государственный технический университет | (72) Автор(ы): Титов Виталий Семенович (RU), Бобырь Максим Владимирович (RU), Яхонтова Елена Сергеевна (RU) (73) Патентообладатель(и): Государственное образовательное учреждение Высшего профессионального образования Курский государственный технический университет (RU) |
(54) СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ТОЧНОСТЬЮ ОБРАБОТКИ ДЕТАЛЕЙ
(57) Реферат:
Изобретение относится к области управления точностью обработки деталей на станках с ЧПУ. С силометрического датчика поступает текущее значение силы резания. Компьютер сравнивает его со значением силы резания, рассчитанным по известной зависимости. При их несовпадении значения параметров режима резания перерассчитываются по заданным формулам. Исходные значения параметров берут в виде нечетких интервалов. Устройство содержит резец, силометрический датчик, операционный усилитель, резистор, контроллер и компьютер. Аналого-цифровой преобразователь устройства образует обратную связь с компьютером. Выход силометрического датчика соединен с входом аналого-цифрового преобразователя и первым входом операционного усилителя. Техническим результатом является повышение геометрической точности поверхности деталей, обрабатываемых на станках с ЧПУ путем автоматизированной коррекции скорости резания и подачи, а также расширение функциональных возможностей устройства. 2 н.п. ф-лы, 3 ил.
Изобретение относится к области управления точностью обработки деталей на станках с ЧПУ.
Известно устройство управления точностью обработки деталей на высокоточном оборудовании с ЧПУ, содержащее оптический датчик, аналого-цифровой преобразователь (АЦП), компьютер, блок усиления сигнала, исполнительные механизмы оборудования с ЧПУ, резец, переднюю и заднюю бабку и деталь [1]. Недостаток данного устройства заключается в том, что значение силы резания рассчитывается до начала обработки детали на оборудовании с ЧПУ, если в ходе резания происходит колебания этого параметра из-за воздействия возмущающих воздействий, например образовалась стружка, то точность обрабатываемой поверхности детали будет снижаться. При этом АЦП преобразует сигнал, полученный от оптического датчика.
Наиболее близким к изобретению по технической сущности является устройство для обработки деталей на оборудовании с ЧПУ, содержащее деталь, резец, резцедержатель, датчик силы резания, операционный усилитель, резистор, коммутатор, контроллер, компьютер и устройство удаления пыли и стружки [2].
Недостаток этого устройства заключается в том, что с помощью датчика силы резания фиксируется только момент времени, когда действующее значение силы резания превышает допустимое значение и после этого включается устройство удаления пыли и стружки. Чтобы расширить функциональные возможности устройства и реагировать на колебания силы резания (поддерживать постоянным значение силы резания), необходима обратная связь, которая позволит путем перерасчета параметров режима резания (скорости резания и подачи) обеспечить постоянноство силы резания и тем самым увеличить точность обрабатываемых деталей на оборудовании с ЧПУ в режиме реального времени.
Известен способ выбора параметров режима резания [3, с.265]. Недостаток данного способа заключается в том, что параметры режима резания, то есть параметры, управляющие перемещением исполнительных механизмов, оборудования с ЧПУ, подача и скорость резания, приведены в виде диапазона рекомендуемых значений. Например, подача при черновом наружном точении резцами с пластинами из твердого сплава и быстрорежущей стали при диаметре детали от 40 до 60 мм составляет 0.5-0.9 мм/об. Из примера видно, что выбрать одно единственное значение подачи для передачи его на исполнительные механизмы оборудования с ЧПУ с целью обеспечения постоянства силы резания и компенсации воздействия возмущающих факторов затруднительно.
Наиболее близким является способ определения допустимой скорости резания при механической обработке детали [4]. Недостаток данного способа заключается в том, что при назначении подачи возникают затруднения, так как она задается также в пределах рекомендуемого диапазона, то есть значения подачи постоянно варьируются 0,1; 0,11; 0,21; 0,3 мм/об.
Технической задачей изобретения является повышение геометрической точности поверхности деталей, обрабатываемых на станках с ЧПУ путем автоматизированной коррекции скорости резания и подачи, а также расширение функциональных возможностей устройства. То есть в процессе прохождения по поверхности детали режущего инструмента под воздействием различных факторов возможно непостоянство силы резания, которое необходимо компенсировать в реальном времени.
Поставленная задача решается тем, что в способе управления точностью обработки деталей на оборудовании с ЧПУ, включающем определение значения силы резания по формуле
 ,
,где Сp - общий коэффициент, зависящий от рода обрабатываемого материала, от вида обработки, инструментального материала и других общих параметров, [безразм.],
 ,
,  ,
,  - параметры режима резания,- скорость резания, [м/мин],- подача, [мм/об],- глубина резания, [мм],
- параметры режима резания,- скорость резания, [м/мин],- подача, [мм/об],- глубина резания, [мм],х, у, n - показатели степени при параметрах режимов резания,
Кр - поправочный коэффициент, [безразм.],
сравнение полученного значения на компьютере с текущим значением силы резания, поступающим от силометрического датчика, при несовпадении текущего и расчетного значения силы резания осуществляют перерасчет подачи и скорости резания по зависимостям:
 при
при  '=1,
'=1,а в других случаях по формулам
где
 s,
s,  s - носитель нечеткого интервала подачи, [мм/об],v, v - носитель нечеткого интервала скорости резания, [м/мин],
s - носитель нечеткого интервала подачи, [мм/об],v, v - носитель нечеткого интервала скорости резания, [м/мин], ,
,  - ядро нечеткого интервала подачи, [мм/об],
- ядро нечеткого интервала подачи, [мм/об], ,
,  - ядро нечеткого интервала скорости резания, [м/мин],
- ядро нечеткого интервала скорости резания, [м/мин],Ki - постоянная величина, зависящая от геометрических характеристик заготовки, [безразм.],
хi - нечеткий интервал для каждой i-ой операции, [безразм.],
' - оптимальная степень, для которой всякое увеличение скорости резания ведет к ухудшению подачи [безразм.],и L(
') - оптимальная степень для разных случаев попадания хi в область нечеткого интервала, [безразм.],при этом их исходные значения берутся в виде нечетких интервалов, а вычисленные значения подачи и силы резания передают на исполнительные механизмы с ЧПУ.
Устройство для управления точностью обработки деталей на оборудовании с ЧПУ содержит резцедержатель, силометрический датчик, операционный усилитель, резистор, контроллер и компьютер, отличающееся тем, что он снабжен аналого-цифровым преобразователем, предназначенным для образования обратной связи с компьютером, при этом выход силометрического датчика соединен с входом аналого-цифрового преобразователя и первым входом операционного усилителя, а выход аналого-цифрового преобразователя подключен к входу компьютера, при этом второй вход операционного усилителя соединен с резистором, вход которого подключен к выходу контроллера, вход контроллера совмещен с первым выходом компьютера, а выход операционного усилителя подключен к входу компьютера, второй выход компьютера подключен к входам исполнительных механизмов с ЧПУ, выходы которых воздействуют на резцедержатель для изменения пространственного расположения резца.
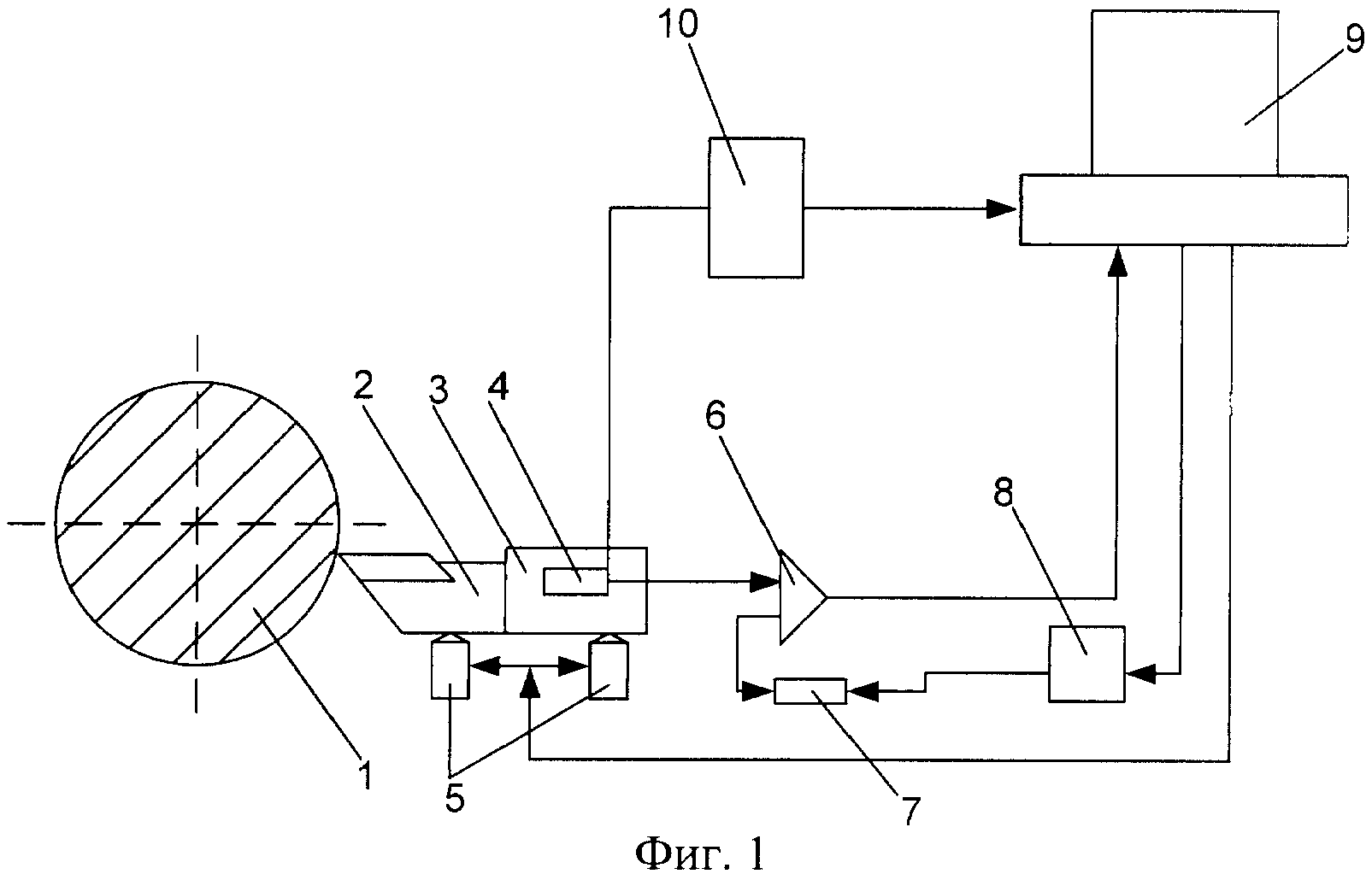
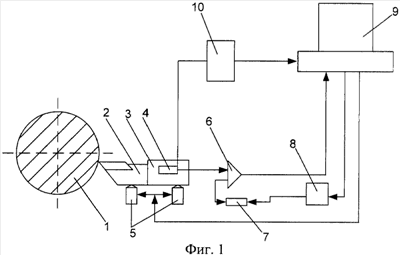
На фиг.1 приведена схема устройства управления точностью обработки деталей.
Устройство управления точностью обработки деталей содержит деталь 1, резец 2, резцедержатель 3, силометрический датчик 4, исполнительные механизмы с ЧПУ 5, операционный усилитель 6, резистор 7, контроллер 8, компьютер 9 и аналого-цифровой преобразователь 10.
Связи в устройстве управления точностью обработки деталей расположены в следующем порядке: выход силометрического датчика 4 соединен с входом аналого-цифрового преобразователя 10 и первым входом операционного усилителя 6. Выход аналого-цифрового преобразователя 10 подключен к входу компьютера 9. Второй вход операционного усилителя 6 соединен с резистором 7, вход которого подключен к выходу контроллера 8. Вход контроллера 8 совмещен с первым выходом компьютера 9. Выход операционного усилителя 6 подключен к входу компьютера 9. Второй выход компьютера 9 подключен к входам исполнительных механизмов с ЧПУ 5, выходы которых воздействуют на резцедержатель 3 для изменения пространственного расположения резца 2.
Устройство управления точностью обработки деталей работает следующим образом. Импульсы выходного сигнала переменного напряжения от силометрического датчика 4 поступают на операционный усилитель 6, который одновременно сравнивает полученные сигналы с эталонным значением напряжения на резисторе 7. Если значения совпадают, то обработка продолжается.
Если нет, то необходимо провести перерасчет силы резания на основании изменения параметров режима резания (подачи и скорости резания). Для этого текущее значение силы резания передается от силометрического датчика 4 посредством аналого-цифрового преобразователя 10 на компьютер 9. По способу, основанному на использовании нечетких интервалов, осуществляется перерасчет параметров режима резания в автоматизированном режиме, который происходит в компьютере 9.
Значения подачи и скорости резания изменяются таким образом, чтобы результат формулы 1 совпал с текущим значением силы резания (поступает от силометрического датчика 4). Как только в результате перерасчета данные совпадают друг с другом, перерассчитанные параметры режима резания (подача и скорость резания) с компьютера 9 передаются на исполнительные механизмы оборудования с ЧПУ 5. Таким образом осуществляется автоматизированная коррекция и обеспечивается постоянство силы резания.
Эталонное значение напряжения на резисторе 7 определяется для различных операций на оборудовании с ЧПУ при помощи компьютера 9 по формуле (1) до обработки деталей на оборудовании с ЧПУ и при помощи контроллера 8 передается на резистор 7. Операционный усилитель 6 настраивается таким образом, чтобы генерировать импульсы на выходе только тогда, когда сигнал выходного напряжения, поступивший от силометрического датчика 4, не равен величине эталонного значения напряжения на резисторе 7. После этого от силометрического датчика 4 текущее значение силы резания поступает посредством аналого-цифрового преобразователя 10 в компьютер 9, где начинает происходит перерасчет по следующему способу.
Способ перерасчета параметров режима резания в компьютере 9 осуществляется следующим образом. Значение силы резания на i-й операции, как известно [2, 3], определяется:

где Ср - общий коэффициент, зависящий от рода обрабатываемого
материала, от вида обработки, инструментального материала и других общих параметров; ti Si Vi, - параметры режима резания: глубина, подача и скорость резания соответственно; х, у, n - показатели степени при параметрах режимов резания; Кр - поправочный коэффициент.
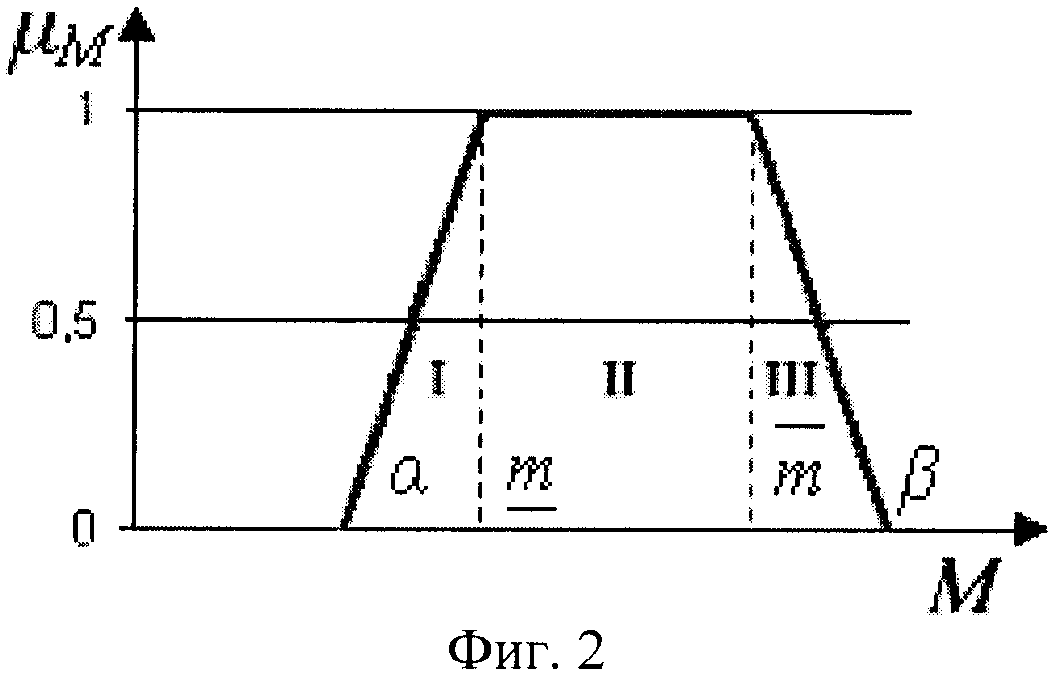
Нечеткий интервал имеет вид и представлен в графическом виде на фиг.2:

где интервал
 - ядро нечеткого интервала М;
- ядро нечеткого интервала М;  и
и  - нижнее и верхнее модальное значение нечеткого интервала М; интервал
- нижнее и верхнее модальное значение нечеткого интервала М; интервал  -носитель нечеткого интервала М; и - левый и правый коэффициент нечеткости соответственно; µM:M
-носитель нечеткого интервала М; и - левый и правый коэффициент нечеткости соответственно; µM:M [0, 1] - отображение множества М в единичный отрезок.
[0, 1] - отображение множества М в единичный отрезок.Форма функции принадлежности нечеткого интервала определяется:
Значение носителя нечеткого интервала
определяется как начальное и конечное значения рекомендуемых диапазонов подачи и скорости резания. Нижнее и верхнее модальное значение и нечеткого интервала определяются по известным значениям из условия (3), таким образом формируется ядро нечеткого интервала. Далее по известным значениям и  определяются коэффициенты нечеткости и , определяя носитель нечеткого интервала.
определяются коэффициенты нечеткости и , определяя носитель нечеткого интервала.Рассмотрим рабочее место, на котором выполняется i-я операция технологического процесса. Пусть Si, и Vi, - нечеткие интервалы, характеризующие подачу si, и скорость резания v соответственно.
Пусть зависимость силы резания Рi от параметров подачи и скорости резания si и vi выражается формулой:

где - Кi, постоянная величина, зависящая от геометрических характеристик заготовки и из формулы (1), равная:

В задаче перерасчета параметров режимов резания при ограничении
 , где Р' - значение силы резания снимается силометрическим датчиком 4, степень удовлетворения нечеткого интервала х для каждой i-й операции определяется из уравнения (4):
, где Р' - значение силы резания снимается силометрическим датчиком 4, степень удовлетворения нечеткого интервала х для каждой i-й операции определяется из уравнения (4):
Нечеткие интервалы выражаются для подачи

 и для скорости резания
и для скорости резания  , при этом перерассчитанное решение (si', vi',) удовлетворяет равенству:
, при этом перерассчитанное решение (si', vi',) удовлетворяет равенству:
где Vi
 Si - операция произведения нечетких интервалов: ' - определяется в рамках исчисления произведения нечетких интервалов по формулам:
Si - операция произведения нечетких интервалов: ' - определяется в рамках исчисления произведения нечетких интервалов по формулам:а) если степень удовлетворения нечеткого интервала хi принадлежит области I, фиг.2 то:
б) если степень удовлетворения нечеткого интервала хi принадлежит области, II фиг.2, то принимается
'=1;в) если степень удовлетворения нечеткого интервала хi принадлежит области, III фиг.2 то:
Далее параметры режима резания si' и vi' определяются по известному значению
'.Если
'=1 (когда степень удовлетворения хi, принадлежит области II, фиг.2), то, обозначая через  ,
,  предпочтительные области значений подачи и скорости резания, получаем:
предпочтительные области значений подачи и скорости резания, получаем:

В противном случае параметры режимов резания si', и vi' определяются по известному значению
' в зависимости от того, к какой области фиг.2 принадлежит значение степени удовлетворения хi:

Таким образом, перерасчет параметров режима резания с учетом ограничения силы резания производится по формулам (2÷13).
В качестве примера разберем технологическую операцию обработки наружной поверхности в два прохода при определяемых значениях силы резания, поступающих от силометрического датчика 4 посредством аналого-цифрового преобразователя 10 на компьютер 9. Данные для расчета приведены в таблице 1.
Шаг 1. Формируем нечеткие интервалы для подачи и скорости резания: задан рекомендованный интервал для подачи (0,2; 0,9) - данные из паспорта станка, табл.1., то есть задан левый и правый коэффициент нечеткости нечеткого интервала
=0,2 =0,9. Эксперт назначает для чернового точения подачу из диапазона (0,4; 0,6) мм/об - [3] при глубине резания t=2 мм и вылете резца 125 мм, то есть ядро нечеткого интервала составляет  =0,4;
=0,4;  =0,6. Теперь можно вычислить носитель нечеткого интервала подачи s=-=0,4-0,2=0,2 и s=-
=0,6. Теперь можно вычислить носитель нечеткого интервала подачи s=-=0,4-0,2=0,2 и s=- =0,9-0,6=0,3. Затем формируется нечеткий интервал (, , s, s)=(0,4; 0,6; 0,2; 0,3) (табл.1).
=0,9-0,6=0,3. Затем формируется нечеткий интервал (, , s, s)=(0,4; 0,6; 0,2; 0,3) (табл.1).Аналогично формируется нечеткий интервал для значений скорости резания (90; 120; 20; 10).
Шаг 2. Необходимо определить ядро и носитель нечеткого интервала Si
Vi для формулы (2):  | Черновое точение | Чистовое точение |
 | i=(0,4-0,2)·1000×(90-20)=14000 | i=(0,5-0,1)·1000×(120-5)=46000 |
 |  |  |
 |  |  |
 | i=(0,6+0,3)·1000×(l20+10)=11700 | i=(0,55+0,05)·1000×(l25+5)-78000 |
| (Примечание: величины получены с учетом перевода единиц измерения из миллиметров в метры, для этого значение подачи умножается на 1000). | | |
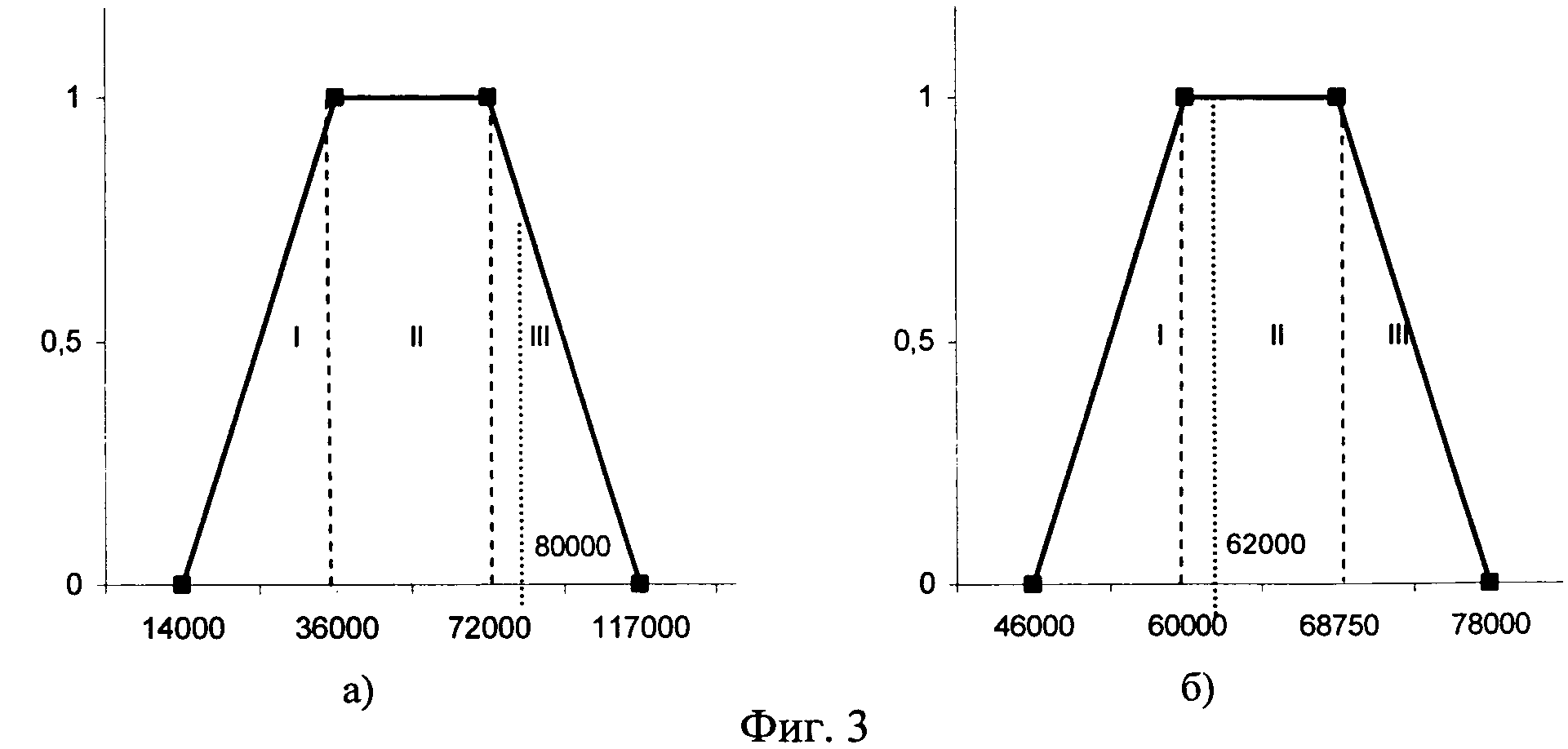
Полученные значения представлены в графическом виде на фиг.3.
Шаг 3. По формуле (6) определяется степень удовлетворения нечеткого интервала хi для каждой технологической операции:
- для чернового точения:
- для чистового точения:
Из получившихся результатов устанавливается, что для чернового точения степень удовлетворения хi принадлежит III интервалу, а для чистового точения хi принадлежит II интервалу, фиг.3.
Шаг 4. Определение
' и параметров режима резания.Для черновой операции
' определяется, учитывая, что степень удовлетворения хi принадлежит III интервалу (фиг.3, а), по формуле (3) произведением нечетких интервалов (L-R)-типа:
Далее по формулам (12÷13) для черновой операции вычисляются параметры режима резания si' и vi':


Для чистового точения (фиг.3, б) степень удовлетворения хi принадлежит II интервалу, следовательно,
'=1 и параметры режима резания подачи и скорость резания si' и vi' определятся по формулам (10÷11):

Полученные значения режимов резания уточняем, используя метод центра тяжести:
Таким образом, с помощью предложенного способа осуществляется перерасчет параметров режима резания в автоматизированном режиме с целью передачи их на исполнительные механизмы оборудования с ЧПУ. Результаты вычислений сведены в таблице 2.
Таким образом, предлагаемый способ и реализованное на нем устройство позволят обеспечить высокую геометрическую точность обрабатываемых поверхностей деталей на оборудовании с ЧПУ и путем автоматизированной коррекции скорости резания и подачи обеспечить постоянство значения силы резания.
| Таблица 1 | | |||||
| Операция | Рi, Н | Кi | Si, мм/об | Vi, м/мин | | |
| Рекомендованный интервал | Нечеткий интервал | Рекомендованный диапазон | Нечеткий интервал | | | |
| Черновое точение | 120 | 0,0015 | (0,2,0,9) | (0,4; 0,6; 0,2,0,3) | (70; 130) | (90; 120; 20; 10) |
| Чистовое точение | 155 | 0,0025 | (0,4; 0,6) | (0,5; 0,55; 0,1; 0,05) | (115; 130) | (120,125; 5; 5) |
| | | | | | | |
| Таблица 2 | | | | | | |
| | Рекомендованный интервал | Уточненные значения | | | | |
| Si, мм/об | Vi, м/мин | Si', мм/об | Vi', м/мин | | | |
| Черновое точение | (0,4; 0,6; 0,2; 0,3) | (90; 120,20; 10) | 0,84 | 128,1 | | |
| Чистовое точение | (0,5; 0,55; 0,1; 0,05) | (120; 125; 5; 5) | 0,505 | 122 | | |
Литература
1. Патент РФ
 2288808, кл. B23B 25/06, B23Q 15/12, 2006 (аналог).
2288808, кл. B23B 25/06, B23Q 15/12, 2006 (аналог).2. Патент РФ
2309034, кл. B23Q 11/02, 2007 (прототип).3. Справочник технолога-машиностроителя. В 2-х т. Т.2 / Под ред. А.Г.Косиловой и Р.К.Мешерякова. - 4-е изд., перераб. и доп. - М.: Машиностроение, 1985. 496 с., ил. (аналог)
4. Патент РФ
2239522, кл. В23В 1/00, 2004 (прототип).Формула изобретения
1. Способ управления точностью обработки деталей на оборудовании с ЧПУ, включающий определение значения силы резания по формуле
 ,
,где Ср - общий коэффициент, зависящий от рода обрабатываемого материала, от вида обработки, инструментального материала и других общих параметров, (безразм.),
 , , - параметры режима резания,- скорость резания, м/мин;- подача, мм/об;- глубина резания, мм;
, , - параметры режима резания,- скорость резания, м/мин;- подача, мм/об;- глубина резания, мм;х, у, n - показатели степени при параметрах режимов резания;
Кр - поправочный коэффициент, (безразм.),
и сравнение полученного значения на компьютере с текущим значением силы резания, поступающим от силометрического датчика, отличающийся тем, что при несовпадении текущего и расчетного значения силы резания осуществляют перерасчет подачи и скорости резания по зависимостям
 ,
, , при '=1,
, при '=1,а в других случаях по формулам
где
s, s - носитель нечеткого интервала подачи, мм/об;v, v - носитель нечеткого интервала скорости резания, м/мин; ,
,  - ядро нечеткого интервала подачи, мм/об;
- ядро нечеткого интервала подачи, мм/об; ,
,  - ядро нечеткого интервала скорости резания, м/мин;
- ядро нечеткого интервала скорости резания, м/мин;Ki - постоянная величина, зависящая от геометрических характеристик заготовки, (безразм.);
хi - нечеткий интервал для каждой i-й операции, (безразм.);
' - оптимальная степень, для которой всякое увеличение скорости резания ведет к ухудшению подачи (безразм.);и L(
') - оптимальная степень для разных случаев попадания хi в область нечеткого интервала, (безразм.),при этом их исходные значения берутся в виде нечетких интервалов, а вычисленные значения подачи и силы резания передают на исполнительные механизмы с ЧПУ.
2. Устройство для управления точностью обработки деталей на оборудовании с ЧПУ, содержащее резцедержатель, силометрический датчик, операционный усилитель, резистор, контроллер и компьютер, отличающееся тем, что он снабжен аналого-цифровым преобразователем, предназначенным для образования обратной связи с компьютером, при этом выход силометрического датчика соединен с входом аналого-цифрового преобразователя и первым входом операционного усилителя, а выход аналого-цифрового преобразователя подключен к входу компьютера, при этом второй вход операционного усилителя соединен с резистором, вход которого подключен к выходу контроллера, вход контроллера совмещен с первым выходом компьютера, а выход операционного усилителя подключен к входу компьютера, второй выход компьютера подключен к входам исполнительных механизмов с ЧПУ, выходы которых воздействуют на резцедержатель для изменения пространственного расположения резца.
РИСУНКИ