
§ Изменение кс при полете по ортодромии
| Вид материала | Лекция |
- Руководство по летной эксплуатации книга, 2381.8kb.
- На эти вопросы можно отвечать по-разному. Уфологи, 46.38kb.
- Эйдос-конспект «Мотив пути в повести» Английский язык 8А,, 21.23kb.
- Предлагаемые Минфином России мероприятия, предусматривающие изменение в 2008 2010 годах, 649.69kb.
- Лекция №12, 74.02kb.
- Контрольная работа на тему «Изменение агрегатных состояний вещества», 7.96kb.
- В дни школьных каникул! Объединенные арабские эмираты, 56.72kb.
- Изменение глобального климата и водные ресурсы, 73.57kb.
- Групповая форма работы на уроках в начальной школе, 69.44kb.
- Й формой итогового контроля знаний, умений и навыков учащихся оставалась контрольная, 90.42kb.
Лекция№9
§ Изменение КС при полете по ортодромии

Под ортодромией понимают линию, которая пересекает меридианы под равными углами, а ее общее направление, относительно опорного меридиана (А) определяется курсом ψ.
Для определения изменения курса при полете по этой линии найдем отношение
 . Рассмотрим параллактический ΔAPB. Самолет находится в точке А и следует курсом ψ по линии АВ. Т.к. угол при вершине В очень маленький, то изменение курса будет незначительным dψ, так же как изменение dφ. Из треугольника по теореме sin запишем:
. Рассмотрим параллактический ΔAPB. Самолет находится в точке А и следует курсом ψ по линии АВ. Т.к. угол при вершине В очень маленький, то изменение курса будет незначительным dψ, так же как изменение dφ. Из треугольника по теореме sin запишем:1.

2.
Учитывая
cosdφ, dψ=1
Учитывая 3, формула 2 преобразуется в следующее соотношение:
4.

5.

Из треугольника АВС, тоже параллактического, найдем величину ВС
6.
7.

Учитывая 3 откуда dφ:
8.

Подставим 8 в 5 получим:
9.
Из формулы 9 следует, что при полете по ортодромии КС изменяется на величину, равную второму слагаемому скорости вращения гироскопа по оси у (см. предыдущий параграф), а следовательно, если компенсировать первое слагаемое, вызванное вращением Земли
 , то 3-х степенной гироскоп будет сохранять направление заданного меридиана при отсутствии внешних сил. Точность гироскопических компасов составляет 0.1-0.2˚
, то 3-х степенной гироскоп будет сохранять направление заданного меридиана при отсутствии внешних сил. Точность гироскопических компасов составляет 0.1-0.2˚§ Принцип устройства автопилота
Система устройств, предназначенных для выдерживания самолетом заданного режима полета и выполнения соответствующих маневров, называется автопилотом. Находясь в воздухе, самолет является объектом с 3-мя степенями свободы вращения. В связи с этим автопилот состоит из 3-х каналов управления: канала направления (курса), канала крена (элерона), канала высоты (тангажа).
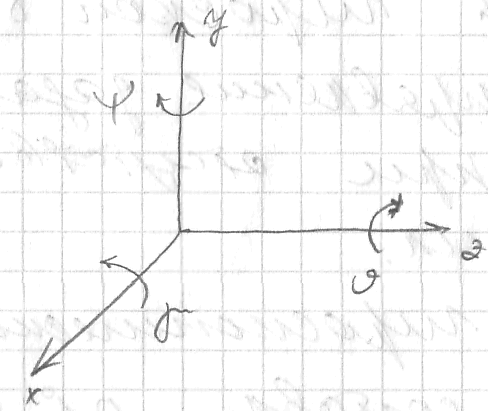
ψ – угол рысканья
υ – угол тангажа
γ – угол крена
Каждый из каналов состоит из нескольких блоков
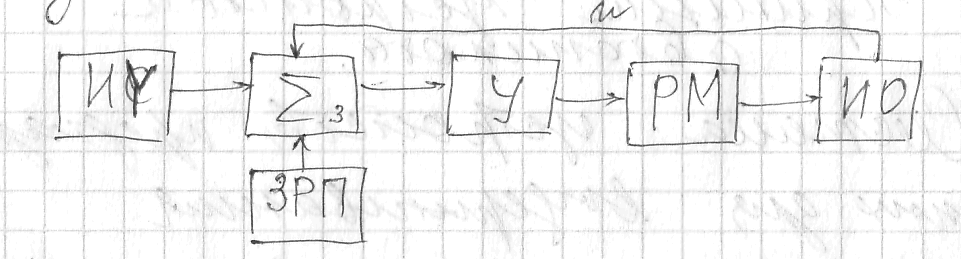
ИУ – измерительные устройства, предназначенные для измерения «ухода» самолета от заданного режима полета. Эти устройства измеряют углы отклонения и скорость их измерения. В качестве датчиков используют:
- 3-х степенные гироскопы для измерения углов (ψ, γ)
- 2-х степенные для измерения скорости изменения углов
- различного рода барометрические датчики измерения изменения скорости полета и высоты Δh.
Σз– Сумматор, который алгебраически суммирует поступившие на него сигналы от всех измерительных устройств и выдает результирующий сигнал для управления рулями самолета. Это как правило потенциометрические схемы и магнитные усилители.
У – усилитель, предназначенный для усиления электрического сигнала до величины, необходимой для поворота рулей управления.
РМ – рулевая машина, предназначенная для управления ИО – исполнительными органами (рули) – самолета как правило, РМ представляет собой гидравлический усилитель или электродвигатель. Для контроля исполнения поданного сигнала система имеет обратную связь (и) с сумматором, где сигнал от рулей управления сравнивается с постоянно поступающим сигналом от задатчика режима полета (ЗРП).
Работа автопилота может быть записана 3-мя уравнениями, каждое из которых соответствует своему каналу и показывает величину отклонения от заданного угла.
1.



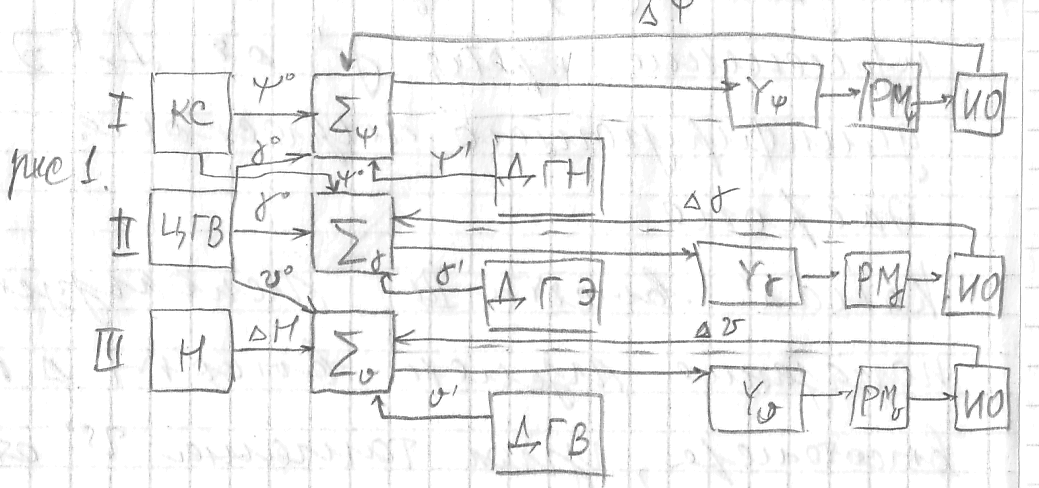
Согласно формуле 1, блок-схема автопилота может быть представлена в следующем виде(рис. 1), где канал направления I сигнал курса ψ˚ поступает от курсовой системы КС, в этот же канал от ЦГВ ((центральной гидровертикали), которая представляет собой систему 2-х степенных гироскопов), поступает угол крена γ˚, а также изменение курса ψ’ от ДГН (демпфирующего гироскопа направления). В канал крена II от ЦГВ поступает γ˚, сюда же ψ˚ и изменение крена γ’ от ДГЭ (демпфирующего гироскопа электрона)
Канал высоты III использует показания изменения высоты ΔH от высотомера, угол тангажа υ ˚ от ЦГВ и изменение тангажа υ’ от ДГВ (демпфирующего гироскопа высоты). Все ДГ объединены в один блок, в котором каждый из 2-х степенных гироскопов ориентирован относительно соответствующей оси самолета.
§ Оценка фотограмметрического качества АФС материала.
Оценка качества выполняется по накидному монтажу. Контролируется обеспечение границ съемочного участка, продольное и поперечное перекрытие аэроснимков, прямолинейность съемочных маршрутов, непараллельность продольных сторон аэроснимка и линии, соединяющей идентичные (например, северо-восточные) углы снимков («елочку»), а также углы наклона аэроснимков и масштаб залета.
1. Монтирование снимков следует вести так, чтобы были видны их регистрационные номера. Для этого монтаж начинают с северного маршрута с его правого - восточного края (левый снимок монтируется на правый). Следующий маршрут монтируется так, чтобы левые верхние углы заходили под снимки предыдущего маршрута.

2. Рамки съемочного участка наносят путем сопоставления характерных объектов монтажа и карты.
3. Определяют масштаб фотографирования по диагоналям монтажа (Формула) и карты dK и масштабу карты Мк: (Формулы)
4. Обеспечение границ съемочного участка: крайние съемочные маршруты должны быть проложены по продольным границам участка, а в каждом съёмочном маршруте за поперечными границами участка должно быть обеспечено наличие полной стереопары.
5. Выдерживание продольного перекрытия рх: при заданном рх =60% допускаются min px= 56% ,mах рх= 66% при h/Н<0,2и mах рх=70% при h/Н>0,2. Количество стереопар в маршруте с рх = max не должно быть больше 5%.
6. Поперечное перекрытие:
| Масштаб Мф | Расчетное Рур | Ру min | Ру max |
| 1:25000 | 30 + 70 Δh/H | 20% | Pyp + 10% |
| 1:25000-1:10000 | 35 + 65 Δh/H | 20% | Рур + 15% |
| Крупнее 1:10000 | 40 +60 Δh/H | 20% | Pyp + 20% |
Продольное перекрытие аэроснимков определяется путем совмещения левого обреза фотограмметрической линейки с правым краем левого снимка, а по правому краю снимают отсчет. Аналогично измеряют поперечное перекрытие - левый обрез линейки совмещают с верхним краем снимка нижнего маршрута, а против верхнего края снимка вышележащего маршрута отсчитывают перекрытие.
7. Углы наклона снимков не должны превышать для f <140мм - α<1,5°, для f>200мм - α <2,0°.
Определение этих углов производится на полевом стереометре ПС-1. Приближенные значения углов наклона аэроснимков определяют по изображению круглого уровня, отображающегося на каждом снимке (в АФА-ТЭ в одном из углов аэронегатива, в АФА-41 уровень впечатывается в межкадровое пространство).
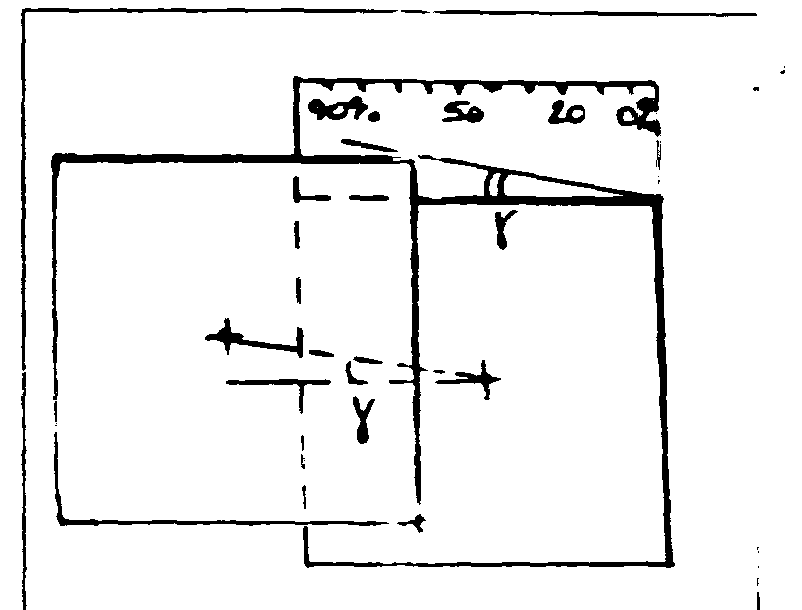
8. Непараллельность базиса фотографирования стороне аэроснимка («елочка») не должна превышать :
Для f=100мм γmax<5°, для f=200мм γmax<10°. «Елочку» выражают в градусах и измерения производят фотограмметрической линейкой. Для измерения «елочки» линейка имеет 6 сходящихся линий. Нулевой линией отсчета является нижний обрез линейки.
У левого края линейки выполнена оцифровка углов, отсчитываемых от нулевой линии с ценой деления через 2°.Чтобы определить «елочку», нижний обрез линейки совмещают с верхней стороной правого снимка так, чтобы точка схода угловых направлений совпала с его правым углом, при этом правый угол левого снимка должен находиться под линейкой. Величина непараллельности продольных сторон к линии, соединяющей идентичные точки («елочка»), определяется по правому углу левого снимка. «Елочка» измеряется 3-5 раз на Маршруте и за окончательное значение берется среднеарифметическое.

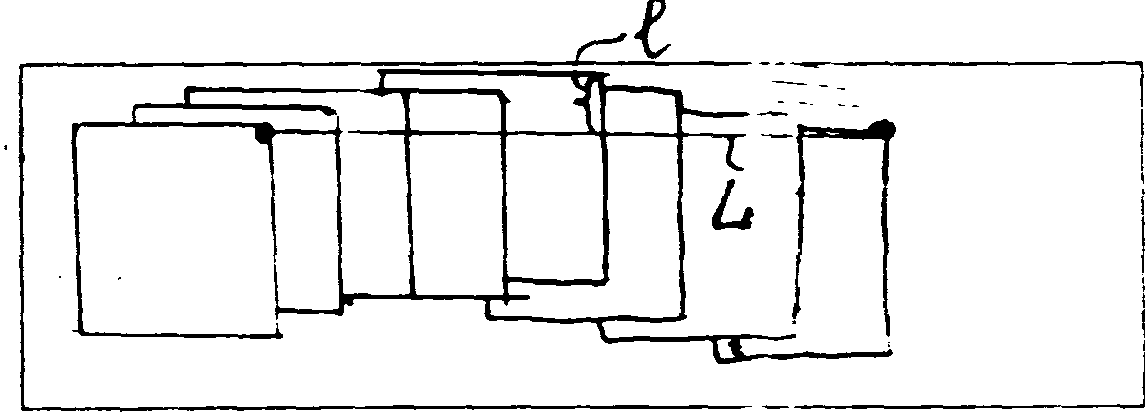
9 Непрямолинейность маршрутов определяется отношением стрелки прогиба l к длине маршрута L:
при Н> 750м l/L <2%, при Н<750м l/L<3%. Для контроля прямолинейности натягивают ленту рулетки между одноименными углами крайних снимков маршрута и измеряют величину l наибольшего отклонения между прямой линией и правым верхним углом снимка.
10. Отклонение оси маршрута не должно быть более 15мм для Мф 1:25000, 20мм для Мф 1:15000, 25мм для Мф 1:10000.
11. Высота полета над средней плоскостью участка не должна отличаться от заданной:
в равнинных районах ΔНф<3%, в горных районах ΔНф< 5% (при Нф < 1000м для равнинных районов ΔН< 30м, для горных районов ΔН <50м).