
Ареф'єв Олександр Олександрович Донецький національний технічний університет
| Вид материала | Документы |
СодержаниеОсновна частина |
- Тетяна Лазарева Донецький національний технічний університет, 147.61kb.
- Геологія та гірничо-видобувні роботи удк 553. 93 Білецький В. С., д т. н., професор, 353.45kb.
- Історія. України. Плани семінарів І завдання для самостійної роботи студентів-Донецьк,, 226.7kb.
- Реферат циклу робіт, 99.93kb.
- Національний технічний університет «Харківський політехнічний інститут»,, 70.45kb.
- Міністерство освіти І науки україни донецький національний університет економіки, 2069.58kb.
- Роль малих та середніх підприємств в економічному розвитку держави ( порівняльний аналіз), 314.38kb.
- Навчально-науковий комплекс «Інститут прикладного системного аналізу» Національний, 47.34kb.
- Навчально-науковий комплекс «Інститут прикладного системного аналізу» Національний, 91.04kb.
- Термін навчання для отримання кваліфікації бакалавра – 4 роки. Після одержання диплома, 77.45kb.
Ареф'єв Олександр Олександрович
Донецький національний технічний університет
ДИСКРЕТНА МАТЕМАТИЧНА МОДЕЛЬ АСИНХРОННОГО ДВИГУНА
Електромеханіка
Асинхронний мотор, перетворювач частоти, модель
Вступ
Сучасний електропривод – це комплексна система, в якій широко застосовуються останні досягнення як силової електроніки – напівпровідникові перетворювачі, так і мікроелектроніки – мікропроцесорні керуючі пристрої. Сьогодні, при виробництві силових перетворювачів частоти, починаючи з розробки нових типів і при серійному виробництві також, необхідно проводити тестові навантажувальні випробування перетворювачів. Для цього, зазвичай використовують громіздкі електромашинні навантажувальні агрегати, що складаються з двох електричних машин, одна з яких є робочою й живиться від досліджуваного перетворювача, а друга, навантажувальна, призначена для створення моменту опору на валу робочої машини, що живиться від власного керованого перетворювача енергії.
Можливий спосіб покращення випробувального агрегату полягає у підключенні до випробуваного перетворювача (джерела напруги) напряму іншого перетворювача (джерела струму), який моделює робочу машину з урахуванням її навантаження, формуючи відповідні фазові струми випробуваного перетворювача [1]. Схема установки подана на рисунку 1.
Рисунок 1 - Схема випробувальної установки
Таким чином, завдяки вилученню із процесу випробувань двох електричних машин можна покращити техніко-економічні показники внаслідок відсутності необхідності мати широкий спектр електричних машин, зниження втрат електроенергії, зменшення потреб у площі для розташування обладнання, зниження рівня генерованого шуму.
Для здійснення керування навантажувальним перетворювачем необхідно вирішити задачу цифрового моделювання електродвигунів з обов’язковим урахуванням дискретності функціонування перетворювача. Тобто необхідно побудувати дискретну математичну модель робочої машини. Для цього, зазвичай, береться математичний опис машини як неперервного об’єкту, а далі здійснюється перетворення моделі з метою цифрової реалізації за допомогою мікропроцесорного контролера. При цьому відбувається цифрове інтегрування, що вносить деяку похибку в кінцеву модель. Окрім того, при використанні більш точного методу (наприклад методу Рунне-Кута 4-го порядку) суттєво підвищується завантаженість контролера.
Альтернативним підходом є побудування моделі одразу в дискретному вигляді. Отримані при цьому результати можна безпосередньо використовувати при програмуванні контролера.
Побудова дискретної моделі з неперервної можлива на підставі теорії z перетворень з урахуванням дискретності функціонування перетворювачів частоти за допомогою ідеальних імпульсних елементів.
Основна частина
В даній роботі розглядаються результати порівняння двох математичних моделей реального асинхронного двигуна з короткозамкненим ротором, параметри якого відомі – неперервної та дискретної, отриманої з неперервної за допомогою z перетворень.
Дослідження має на меті перевірити теоретичниі положення, викладені в [1], проаналізувати переваги та недоліки раніше створеної моделі асинхронного двигуна, зробити висновок про відповідність дискретної та неперервної моделі.
Вхідними змінними для моделі будуть виміряні середні величини фазних напруг, що генеруються випробуваним перетворювачем.
На виході моделі необхідно отримати середні фазні струми, що будуть завданням для управління навантажувальним перетворювачем.
Загальна структура, реалізована за допомогою середовища MATLAB має вигляд, представлений на рисунку 2.
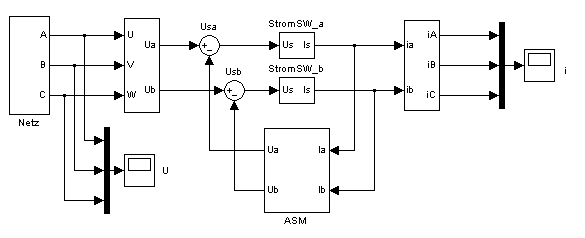
Рисунок 2 – Структурна схема формування завдань для системи управління навантажувальним перетворювачем, реалізована у Simulink.
На схемі представлено ASM – модель асинхронного двигуна у d-q системі координат, орієнтованій за вектором магнітного поля двигуна, при живленні його від джерела струму; ланки SW відображають електромагнітні властивості статора двигуна. Окрім того на схемі наведені два блоки координатних перетворень (з трифазної системи координат до двофазної й навпаки) та блок, що моделює мережу живлення.
Неперервна модель асинхронного двигуна була створена на основі схеми, наведеної в [2], яка була деталізована та доповнена каналом, що враховує насичення сталі статора [3]. Отримана таким чином схема зображена на рисунку 3.
Ця модель доволі точно описує реальний двигун. З недоліків, проте, можна відзначити лише наявність діференціюючої ланки, яку неможливо реалізувати в реальності абсолютно точно. Проте це не впливає суттєво на результати моделювання й до того ж схема може бути видозмінена таким чином, щоб виключити використання діференіюючої ланки.
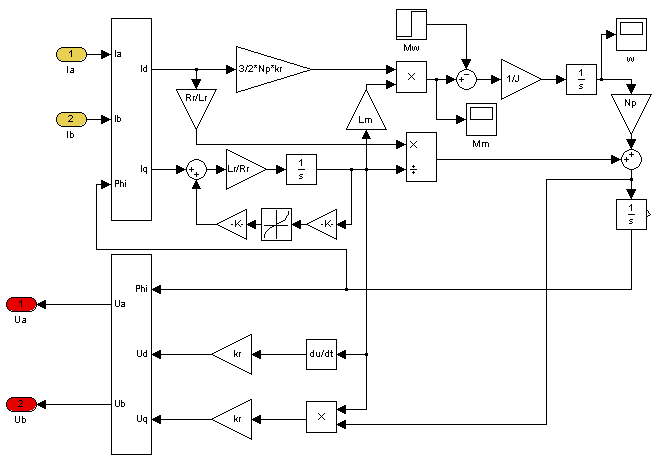
Рисунок 3 –Структурна схема неперервної моделі асинхронного двигуна
Дискретна модель асинхронного двигуна була реалізована згідно [1], шляхом заміни в неперервній деталізованій схемі неперервних інтеграторів дискретними інтеграторами
 (білінійне перетворення) та доповненням схеми передавальними функціями, що враховують перехід від середніх значень струмів (Current_d, q) до миттєвих та зворотний вплив двигуна, відповідно.
(білінійне перетворення) та доповненням схеми передавальними функціями, що враховують перехід від середніх значень струмів (Current_d, q) до миттєвих та зворотний вплив двигуна, відповідно.Схема дискретної моделі зображена на рисунку 4.
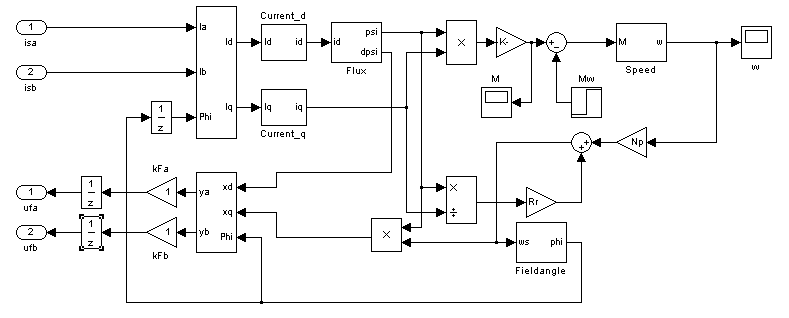
Рисунок 4 –Структурна схема дискретної моделі асинхронного двигуна
До недоліків наведеної схеми можна віднести по-перше, складність математичного описання через реалізацію чисельного інтегрування за методом Тастіна. Однак, поряд з тим це, по-перше, забезпечує стійкість системи та, по-друге, точність такого перетворення значно вища за точність перетворень за методами Ейлера (звичайним та модифікованим). Ще одним недоліком схеми можна назвати доволі приблизне врахування ефекту насичення сталі статора двигуна. Для більш точного врахування необхідно використовувати, як це зроблено в неперервній моделі, замість ланки насичення в блоці обчислення потоку (Flux), реальну криву намагнічування двигуна (у відносних одиницях).
Окремо слід також зауважити, що необхідно при побудові дискретної моделі враховувати імпульсний вплив перетворювача на формування струмів двигуна. Це робиться на підставі структури з ідеальним імпульсним елементом (IE), ланки, що описує перетворювач частоти (рисунок 5, 1), та ланки, що відповідає статорній обмотці двигуна (рисунок 5, 2). Обґрунтування цих передатних функцій наведено в [4].
Висновки
Основним завданням роботи на даному етапі було комп’ютерне моделювання в середовищі MATLAB/Simulink. На рисунку 6 наведені результати процесу моделювання
В результаті моделювання були отримані осцилограми зміни швидкості ω та моменту M при прямому пуску та при накиді навантаження (момент опору дорівнює номінальному моменту двигуна). Криві подані у відносних одиницях.
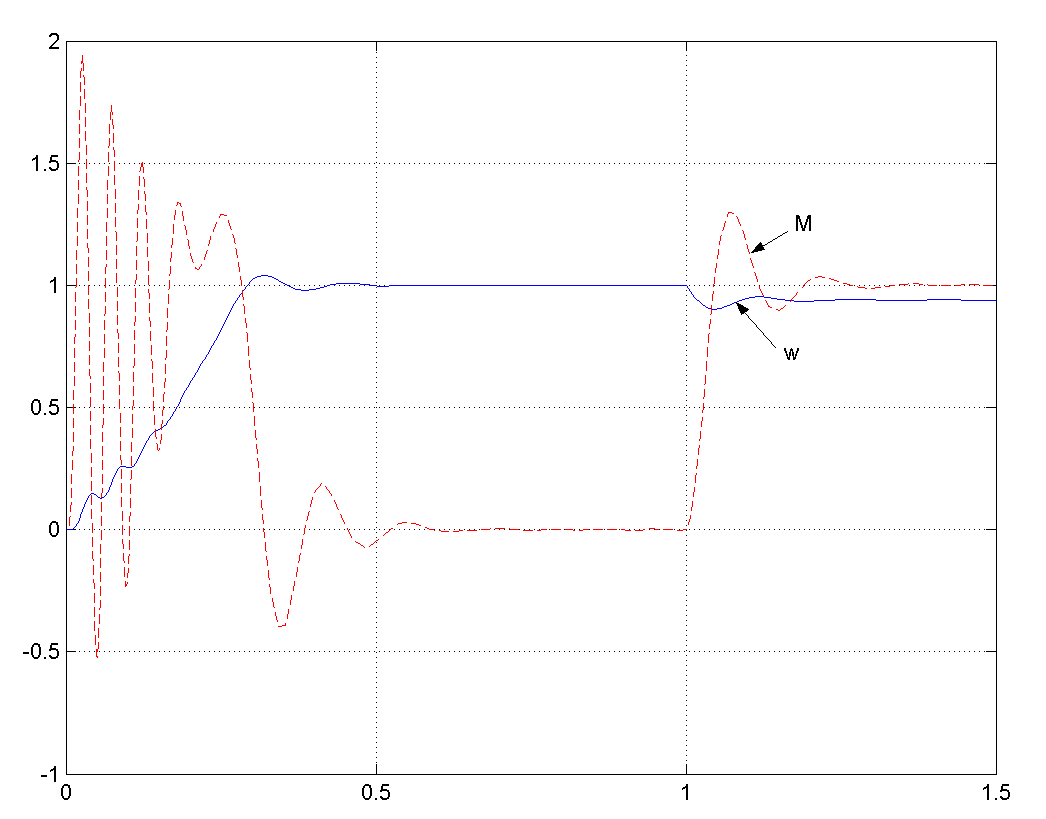
t, c
Рисунок 6 – Перехідні процеси в моделі електродвигуна при прямому пуску та накиді навантаження
На рисунку 7 подані графіки результатів моделювання розгону двигуна та накиду навантаження при формуванні вхідних фазних напруг за принципом широтно-імпульсної модуляції за законом U/f=const.
Рисунок 7 - Графіки результатів моделювання процесу змінення швидкості двигуна
Отже, аналізуючи результати моделювання, робимо висновок про хорошу відповідність дискретної моделі неперервній. Окрім того, якщо розглянути ці графіки більш детально, можна побачити, що в кінці інтервалів дискретності дискретні та миттєві значення достатньо точно відповідають одне одному і для швидкості й для моменту (рисунок 8).
Рисунок 8 – Фрагменти графіків за результатами моделювання процесів у двигуні
В подальшому, в рамках продовження досліджень цієї дискретної моделі планується провести досліди на лабораторній установці та порівняти роботу дискретної моделі з реальним асинхронним двигуном у режимі реального часу за допомогою спеціального програмного пакету.
З практичної точки зору, розглянута дискретна модель окрім вказаного раніше застосування для керування навантажувальним перетворювачем може бути також в системах Hardware-in-the-Loop для емуляції силової частини електроприводу та при синтезі алгоритмів регулювання асинхронного електропривода.
Джерела
- Старостін С.С. Передерій О.В. Дискретна математична модель асинхронного двигуна// Електромеханічні і енергозберігаючі системи. – Кременчук: КДПУ, 2007. Вип. 1/2007. – С. 53-56 .
- U. Riefenstal. Elektrische Antriebstechnik. Stuttgart Leipzig, Teubner, 2000.
- В.І.Калашніков, В.В.Булахов. Векторне управління частотно регульованим електроприводом. Методичні вказівка до лабораторного практикуму за курсом «Частотно-керований електропривод» - Донецьк, ДонДТУ. – 2001.
- Старостін С.С. Урахування дискретних властивостей силових перетворювачів електроенергії при синтезі електромехатронних систем // Вісник Національного технічного університету “Харківський політехнічний інститут”. Сер. “Електротехніка, електроніка та електропривод”. Тем. випуск 45 “Проблеми автоматизованого електропривода. Теорія та практика”. - Харків, НТУ ХПІ, 2005. - С.348 - 351.