
Електромеханічні системи та автоматизація
| Вид материала | Документы |
СодержаниеМатериал и результаты исследований. |
- Електромеханічні системи та автоматизація, 80.48kb.
- Електромеханічні системи та автоматизація, 84.63kb.
- Електромеханічні системи та автоматизація, 71.49kb.
- Електромеханічні системи та автоматизація, 76.38kb.
- Електромеханічні системи та автоматизація, 115.67kb.
- Електромеханічні системи та автоматизація, 164.34kb.
- Завідувач кафедри М. П. Рагозін затверджено: на засіданні навчально-видавничої ради, 230.44kb.
- Міністерство освіти І науки України Харківська національна академія міського господарства, 331.39kb.
- Автоматизовані системи діловодства, 57.34kb.
- Спеціальність: 090702 "Радіоелектронні пристрої, системи та комплекси " Освітньо-кваліфікаційний, 67.37kb.
ЕЛЕКТРОМЕХАНІЧНІ СИСТЕМИ ТА АВТОМАТИЗАЦІЯ
УДК 625.1.032.3.001.5
УЛУЧШЕНИЕ СЦЕПНЫХ СВОЙСТВ ЛОКОМОТИВОВ ПРИ НЕСТАЦИОНАРНЫХ ПРОЦЕССАХ РЕАЛИЗАЦИИ СИЛЫ ТЯГИ
Шапран Е.Н., Тасанг Э. Х.
Восточноукраинский национальный университет им. В. Даля, г. Луганск
Введение. Тенденции развития транспортной сети Украины тесно связаны с ростом грузооборота железнодорожного транспорта. При этом повышение весовых норм поездов и низкий уровень коэффициентов сцепления на некоторых грузонапряженных участках железных дорог порождает нестационарные процессы реализации силы тяги локомотивами. Они заключаются в продолжительных и глубоких пробуксовках колесных пар, которые плохо предотвращаются интенсивной подачей песка.
В настоящее время известен ряд систем противобуксовочной защиты локомотивов, построенных на различных принципах действия в зависимости от используемых сигналов, отражающих начало развития процессов буксования. Наиболее часто используется сравнение скоростей колесных пар с эталонной скоростью или их сравнение между собой, сравнение угловых ускорений колесных пар и т.д. [1]. Таким образом, все эти системы защиты имеют общий недостаток, заключающийся в том, что они вступают в работу тогда, когда уже произошел срыв сцепления и начался процесс буксования колесной пары, т.е. они реагируют не на причину нарушения сцепления, а на ее следствие.
Цель работы – построение противобуксовочной системы локомотива, избирательно воздействующей на вращающие моменты тяговых двигателей (ТД) в зависимости от изменения силы тяги на автосцепке, вызывающей динамическое перераспределение вертикальных усилий на колесные пары.
Материал и результаты исследований. С целью исследования предлагаемой системы была уточнена математическая модель движения тепловоза с вагонами [2], представляющая собой сочетание нескольких функциональных блоков, таких как:
- Блок моделирования электромеханических переходных процессов в цепях тяговых двигателей, питающихся от тягового генератора (ТГ) или выпрямительной установки (ВУ).
- Блок моделирования механических процессов, связанных с передачей крутящего момента от якоря тягового двигателя через зубчатый редуктор к оси колесной пары с учетом характеристик сцепления каждого колеса с рельсом.
- Блок моделирования процессов движения локомотива с составом, учитывающий все виды сопротивления движению поезда.
Необходимо отметить, что в существующую модель [2] введен блок динамического расчета нагрузок от осей колесных пар на рельсы в зависимости от силы тяги локомотива.
На рис. 1, а приведена схема экипажной части тепловоза 2ТЭ116 для расчета распределения нагрузок по колесным парам в зависимости от силы тяги. На схеме приняты следующие обозначения: 2А, 2С – расстояния между внутренними и внешними опорами кузова на тележки; 2В – расстояние между осями средних колесных пар тележек; D – расстояние между осями колесных пар в тележке;
 – расстояние от оси до подвески ТД;
– расстояние от оси до подвески ТД;  – высота от головки рельса до середины автосцепки и шкворня;
– высота от головки рельса до середины автосцепки и шкворня;  – радиус колеса по кругу катания.
– радиус колеса по кругу катания.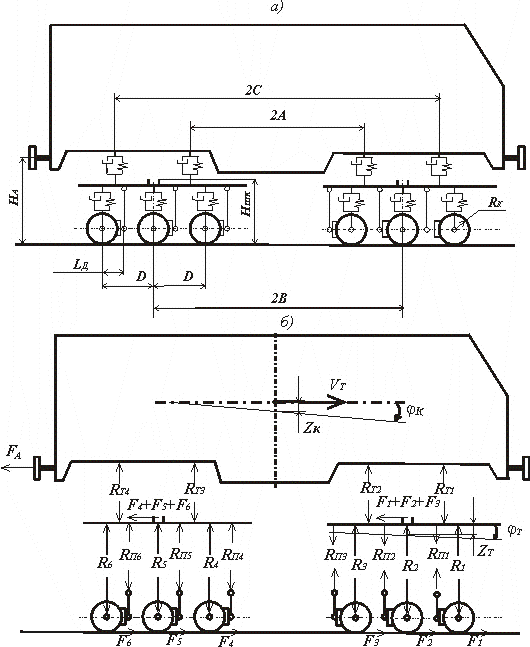
Рисунок 1 - Экипажная часть тепловоза 2ТЭ116:
а) схема подвешивания; б) схема действующих сил
На расчетной схеме сил (рис. 1, б), тепловоз разбит на три колеблющиеся массы: кузов и две тележки. Между кузовом и тележками предусмотрена упруго-диссипативная связь, показанная реакциями опор
 , моделирующих вторую ступень рессорного подвешивания. От тележек через упруго-диссипативную связь первой ступени рессорного подвешивания, показанную реакциями
, моделирующих вторую ступень рессорного подвешивания. От тележек через упруго-диссипативную связь первой ступени рессорного подвешивания, показанную реакциями  нагрузка, передается на колесно-моторные блоки (КМБ). Кроме того, дополнительно показаны разгружающие переднюю и догружающие заднюю тележки реакции от подвески ТД в КМБ
нагрузка, передается на колесно-моторные блоки (КМБ). Кроме того, дополнительно показаны разгружающие переднюю и догружающие заднюю тележки реакции от подвески ТД в КМБ  , которые определяются по следующим зависимостям:
, которые определяются по следующим зависимостям:
где i - номер колесной пары локомотива; Fi – сила тяги i-й колесной пары.
Математическая модель динамического расчета нагрузок от осей колесных пар на рельсы в зависимости от силы тяги представляет собой систему дифференциальных уравнений равновесия сил и моментов второго порядка, которые составлены для каждой массы экипажной части - кузова, передней и задней тележек. При этом за положительные направления перемещения масс (
 ) приняты направления, догружающие связи кузова с тележками и тележек с КМБ, т.е. перемещения вниз и по часовой стрелке (для угловых перемещений масс
) приняты направления, догружающие связи кузова с тележками и тележек с КМБ, т.е. перемещения вниз и по часовой стрелке (для угловых перемещений масс  ).
).Таким образом, уравнения равновесия сил и моментов кузова будут иметь вид:
 (1)
(1)Силы и моменты для первой тележки:
 (2)
(2)Силы и моменты для второй тележки:
 (3)
(3)В уравнениях (1-3) приняты следующие обозначения:
 – массы и моменты инерции кузова и тележек (обрессоренная составляющая);
– массы и моменты инерции кузова и тележек (обрессоренная составляющая);  – суммарные силы тяги первой и второй тележек;
– суммарные силы тяги первой и второй тележек;  - соответственно веса кузова, тележек и КМБ.
- соответственно веса кузова, тележек и КМБ.Реакции в опорах кузова (вторая ступень подвешивания) можно определить по таким уравнениям:
 (4)
(4)где
 – жесткость и коэффициент демпфирования опор второй ступени рессорного подвешивания;
– жесткость и коэффициент демпфирования опор второй ступени рессорного подвешивания;  ,
,  ,
,  – скорости перемещения кузова и тележек в вертикальной плоскости.
– скорости перемещения кузова и тележек в вертикальной плоскости.Кроме того, реакции в пружинах связи тележек с колесными парами (первая ступень подвешивания) будут равны:
 (5)
(5)где
 – жесткость и коэффициент демпфирования первой ступени рессорного подвешивания.
– жесткость и коэффициент демпфирования первой ступени рессорного подвешивания.Из уравнений (1-5) можно определить нагрузки от колесных пар на рельсы алгебраическим суммированием необрессоренных масс КМБ, реакций от первой ступени рессорного подвешивания и реакций от подвески ТД в КМБ
 в таком виде:
в таком виде: (6)
(6)На основании приведенных уравнений (1-6) в интерактивной среде SIMULINK разработана блок-схема моделирования динамических нагрузок от осей колесных пар на рельсы (рис. 2).
Исследование процессов перераспределения нагрузок от колесных пар на рельсы показали, что отношение приращения динамической нагрузки
 относительно ее статического значения Рст к силе тяги на автосцепке FA постоянно для каждой колесной пары во всех режимах движения локомотива. Если принять равномерное распределение тягового усилия между колесными парами, то эта зависимость будет иметь вид:
относительно ее статического значения Рст к силе тяги на автосцепке FA постоянно для каждой колесной пары во всех режимах движения локомотива. Если принять равномерное распределение тягового усилия между колесными парами, то эта зависимость будет иметь вид: , (7)
, (7) где
 – значение силы тяги без учета перераспределения нагрузки.
– значение силы тяги без учета перераспределения нагрузки.Так, например, для шестиосного тепловоза 2ТЭ116 получены следующие коэффициенты: К1=-0,0463; К2=-0,0139; К3=0,0178; К4=-0,0178; К5=0,0139 и К6=0,0463.
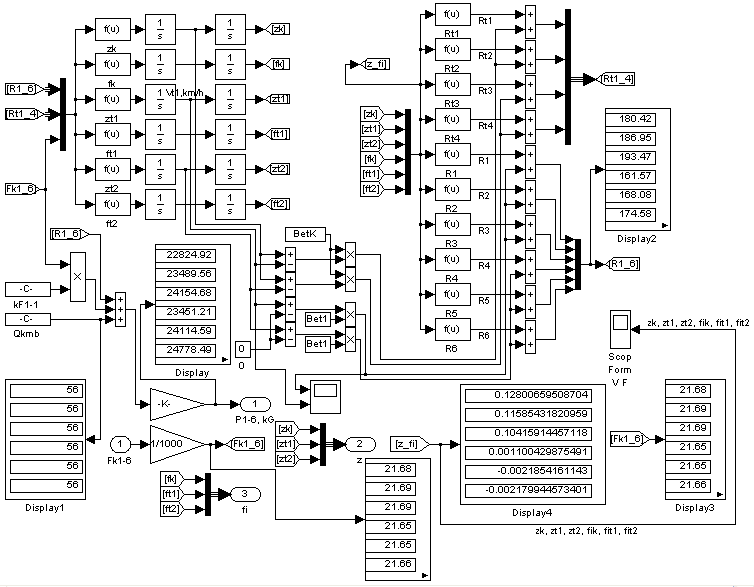
Рисунок 2 - Блок-схема моделирования динамических нагрузок от осей колесных пар на рельсы при
нестационарных процессах реализации силы тяги локомотива
Выводы.
1. Динамическое перераспределение нагрузок от осей колесных пар на рельсы при нестационарных процессах реализации силы тяги можно учитывать по приведенным коэффициентам К1-К6, индивидуальным для каждого типа локомотива.
2. Для улучшения сцепных свойств локомотивов и снижения вероятности развития процессов буксования целесообразно создавать превентивные противобуксовочные системы управления электропередачами тепловозов, которые бы априорно учитывали динамическое перераспределение нагрузок от осей колесных пар на рельсы путем предварительной регулировки токов тяговых двигателей в соответствии с полученными коэффициентами К1-К6.
3. В дальнейших исследованиях необходимо разработать адаптивные алгоритмы управления электропередачами тепловозов, которые бы учитывали не только процессы перераспределения нагрузок от осей колесных пар, но и позволяли бы определять фактические параметры колесно-моторных блоков и коэффициентов сцепления непосредственно в процессе движения локомотива.
4. Необходимо продолжение исследований по разработке технических средств для реализации алгоритмов поосного регулирования тяговых двигателей существующих электропередач постоянного и переменно-постоянного тока с целью модернизации эксплуатируемого парка локомотивов для повышения их тяговых свойств.
ЛИТЕРАТУРА
- Минов Д.К. Повышение тяговых свойств электровозов и тепловозов с электрической передачей. – М.: Транспорт. – 1965. - 267 с.
- Тасанг Э.Х., Шапран Е.Н. Моделирование динамических процессов в тяговых передачах локомотивов. // Вісн. Східноукр. нац. ун-т. Часть II. – 2005.–№8(90). С. 83-88.
Стаття надійшла 25.04.2006 р.
Рекомендовано до друку
д.т.н., проф. Загірняком М.В.
Вісник КДПУ. Випуск 3/2006 (38). Частина 2