
Електромеханічні системи та автоматизація
| Вид материала | Документы |
СодержаниеЦель работы. Материалы и результаты исследования. |
- Електромеханічні системи та автоматизація, 80.48kb.
- Електромеханічні системи та автоматизація, 84.63kb.
- Електромеханічні системи та автоматизація, 65.15kb.
- Електромеханічні системи та автоматизація, 71.49kb.
- Електромеханічні системи та автоматизація, 76.38kb.
- Електромеханічні системи та автоматизація, 115.67kb.
- Завідувач кафедри М. П. Рагозін затверджено: на засіданні навчально-видавничої ради, 230.44kb.
- Міністерство освіти І науки України Харківська національна академія міського господарства, 331.39kb.
- Автоматизовані системи діловодства, 57.34kb.
- Спеціальність: 090702 "Радіоелектронні пристрої, системи та комплекси " Освітньо-кваліфікаційний, 67.37kb.
ЕЛЕКТРОМЕХАНІЧНІ СИСТЕМИ ТА АВТОМАТИЗАЦІЯ
УДК 621.313
РАСШИРЕНИЕ СФЕРЫ ИСПОЛЬЗОВАНИЯ РЕГУЛИРУЕМОГО
ПО НАПРЯЖЕНИЮ АСИНХРОННОГО ПРИВОДА
Юхименко М.Ю., Гладырь А.И.
Кременчугский государственный политехнический университет
Институт электромеханики, энергосбережения и компьютерных технологий
Гомилко В.И.
ЗАО “Научно-технический центр “Информационные системы”, Кременчуг
Введение. Большое разнообразие технических объектов, приводимых в движение электроприводом, широкий диапазон мощности и скорости вращения приводит к соответствующему разнообразию структурных, конструктивных, схемотехнических решений, применяемых в различных системах электропривода.
Наиболее распространенному в промышленности электроприводу с асинхронными двигателями (АД) с короткозамкнутым ротором присущи малая управляемость и низкие динамические свойства. Малая управляемость обусловлена невозможностью изменения скорости в широком диапазоне при постоянной частоте питающей сети, а также трудностями реализации режимов плавного пуска, точной остановки, позиционирования и отработки малых перемещений, а возникающие при коммутации знакопеременные электромагнитные моменты существенно ухудшают переходные режимы.
Цель работы. Целью работы является анализ возможности повышения управляемости АД путем улучшения характеристик регулирования скорости и момента двигателя, снижение знакопеременных моментов двигателя в динамических режимах и анализ возможностей расширения сферы использования регулируемого по напряжению асинхронного электропривода.
Материалы и результаты исследования. В настоящее время существует и постоянно увеличивается число промышленных машин и механизмов, которые работают в повторно-кратковременных или интенсивных динамических режимах (частых пусков, торможений, реверсирования, повторных включений и т.п.), в тяжелых условиях пуска (разгона больших маховых масс на протяжении значительного промежутка времени), в режимах регуляции частоты вращения или управления необходимыми режимами работы и движения по заданным законам, тахо- и циклограммам и другими требованиями современного сложного производства.
В этих условиях использование регулируемого электропривода (РЭП) во всех отраслях промышленности, сельском и коммунальном хозяйствах, на транспорте обеспечивает решение следующих важных задач:
- комплексной механизации и автоматизации производства;
- совершенствования существующих и разработки новых технологических процессов;
- снижения себестоимости, повышения качества и конкурентоспособности продукции;
- рационального использования и сохранения ресурсов и электроэнергии;
- достижения оптимальных и согласованных режимов работы разнообразного оборудования, машин и механизмов в сложном современном производстве;
- повышение надежности и увеличение сроков их безотказной работы;
- снижение количества выпуска недоброкачественной и бракованной продукции;
- уменьшение расходов на ремонт и эксплуатацию.
По указанным причинам доля РЭП в промышленности США составляет 40%, а в ФРГ - 50% [11]. Для этого используются все возможные варианты РЭП независимо от их сложности и цены. Такое значительное внимание, которое уделяется зарубежными специалистами РЭП, объясняется тем, что без него невозможна реализация современных технологических процессов, высокое качество продукции и эффективности (получение прибыли). Экономическая эффективность от перечисленных показателей значительно (на два-три порядка) выше, чем эффективность от повышения энергетических показателей (коэффициентов мощности и полезного действия). Поэтому при выборе типа РЭП в каждом конкретном случае на первый план выдвигаются его преимущества, хотя и энергетические показатели также учитываются.
В то же время доля регулируемого РЭП в странах СНГ составляет несколько процентов. Этим объясняется невысокий уровень качества продукции и значительные энергозатраты на ее изготовление.
Для решения задач регулирования скорости АД с короткозамкнутым ротором, в настоящее время наибольшее применение получили следующие способы регулирования: изменением частоты питающего напряжения, амплитуды питающего напряжения, числа пар полюсов статора (табл. 1).
Таблица 1 -
Способы регулирования асинхронных электродвигателей с короткозамкнутым ротором
| № п/п | Система привода | Рекомендуемый диапазон применения | Достоинства | Недостатки |
| 1 | Система с тиристорным преобразователем частоты (со звеном постоянного тока и непосредственным преобразованием частоты) | до 1000 кВт | КПД более 0,8 во всех режимах регулирования | Стоимость преобразователей значительно (в 5-6 раз) превышает стоимость двигателя |
| Жесткие регулировочные характеристики во всех режимах регулирования | Сложность управления и наладки схем | |||
| Возможность повышения частоты вращения двигателя выше номинальной (выше частоты питающей сети) | Необходимость увеличения установленной мощности асинхронного двигателя вследствие увеличения потерь при питании несинусоидальными напряжением и током | |||
| 2 | Система с многоскоростными двигателями (переключение пар полюсов) | До 40 кВт | КПД более 0,9 во всех режимах регулирования | Стоимость многоскоростного двигателя в 1,7 раза выше обычного; |
| Высокий коэффициент мощности во всех режимах регулирования | Возможна потеря устойчивости центробежными насосами при ступенчатом регулировании | |||
| 3 | Система с регулированием напряжения на зажимах статорных обмоток (автотрансформатором, дросселями насыщения, магнитными усилителями, реостатом, тиристорным регулятором напряжения) | до 100 кВт | Низкая стоимость дополнительного оборудования | Энергия скольжения рассеивается непосредственно в двигателе |
| Малые габаритные размеры | Возникновение субгармонических колебаний системы с частотой 3-5 Гц при критическом скольжении менее 20 % и тиристорном регулировании напряжения | |||
| Высокая надежность вследствие отсутствия скользящих контактов |
Системы привода с использованием многоскоростных асинхронных двигателей находят применение для технологических механизмов, по условиям эксплуатации которых ступенчатое регулирование скорости является допустимым и составляют незначительную часть от общего количества АД.
Основную часть регулируемого асинхронного электропривода составляют системы, содержащие статические полупроводниковые преобразователи. Даже в тех случаях, когда не требуется изменение скорости, применение таких преобразователей позволяет расширить функциональные возможности электропривода (повышение пускового момента, ограничение токов, повышение уровня защиты и диагностики, большая надежность работы). Как правило, необходимость регулирования скорости или момента электроприводов производственных механизмов диктуется требованиями технологического процесса, но может дать и существенную экономию энергии и материальных ресурсов. При неполной загрузке рабочей машины работа привода с постоянной скоростью характеризуется повышенным удельным расходом электроэнергии по сравнению с номинальным режимом.
Кроме того, использование электропривода с регуляторами напряжения в цепи статора АД может быть рекомендовано для всех механизмов с незначительным диапазоном изменения скорости, для получения кратковременных сниженных частот вращения турбомеханизмов, намоточных машин, для кранов, подъемников, транспортно-складского оборудования, других машин и механизмов разнообразного назначения.
С другой стороны, в ряде случаев выдвигаются необоснованные требования использовать системы привода с плавным регулированием с большим диапазоном регулирования для этих установок. В то же время достаточно большой диапазон регулирования производительности, например, для механизмов с вентиляторным характером нагрузки (рис. 1), можно получить при диапазоне изменения скорости, не превышающем 20 % [2].
При разработке схемотехнических решений силового канала асинхронного электропривода и алгоритмов управления приходится учитывать особенности, характерные для любого типа электродвигателя, как нагрузки преобразователя:
- сильно индуктивный характер;
- наличие противо-ЭДС вращения;
- возможные кратковременные, но многократные перегрузки по току;
- близость начального этапа пуска к режиму короткого замыкания;
- рекуперация механической энергии в динамических и тормозных режимах;
- взаимосвязь электрических и магнитных контуров разных фаз.
Дополнительно следует иметь ввиду, что разнообразие требований к электроприводу (номинальные значения, диапазон, точность и плавность регулирования скорости, способы защиты и управления) не позволяет пока создать полностью универсальное решение.
Одна из причин, по которой развитие РЭП в нашей стране в течение значительного времени (20-30 лет) не нашло должного развития, состоит в том, что преобладало мнение, что проблема создания РЭП успешно решается разработкой тиристорных преобразователей частоты (ТПЧ). При этом предполагалось, что для РЭП с ТПЧ смогут быть применены короткозамкнутые АД общепромышленного исполнения. Однако наряду с достоинствами РЭП по схеме ТПЧ-АД (при использовании АД с короткозамкнутым ротором) имеют место недостатки [8], заслуживающие отдельного рассмотрения.
При работе двигателя в режиме частых пусков и торможений большое значение имеют условия формирования пусковых и тормозных моментов. Механические характеристики асинхронного двигателя при питании от преобразователя частоты, работающего в режиме автономного источника напряжения, снижают критический момент в зоне малых частот. При этом существенное влияние оказывает активное сопротивление обмотки фазы статора r1 [6]. Для увеличения момента в зоне малых частот приходится повышать напряжение на статоре.
К другим недостаткам преобразователей частоты относятся: уменьшение коэффициента мощности системы ПЧ–АД, это означает увеличение реактивной составляющей входного тока и, как следствие, суммарного тока, потребляемого системой ПЧ–АД из сети. Причиной этого являются высшие гармоники тока, а именно 5-я, 7-я, 11-я, 13-я, 17-я, 19-я гармоники, генерируемые неуправляемым выпрямителем. То есть в сети будут циркулировать, кроме токов основной частоты 50 Гц, токи с частотами 250, 350, 550, 650, 850, 950 Гц. Выражения (1) и (2) иллюстрируют негативное влияние данного явления.
 , (1)
, (1) , (2)
, (2)где: – коэффициент мощности системы ПЧ–АД;
P – активная мощность, потребляемая из сети системой ПЧ–АД;
S – полная мощность, потребляемая из сети системой ПЧ–АД;
U1 – действующее значение первой гармоники напряжения;
I1 – действующее значение первой гармоники тока;
сos – коэффициент мощности АД при питании его от промышленной сети;
IS – действующее значение суммарного тока;
In – действующее значение n-гармоники тока.
Это вызывает необходимость установки мощных фильтров для обеспечения электромагнитной совместимости электропривода с сетью, что повышает стоимость и габариты преобразователя; в связи с высокочастотной модуляцией ускоряется процесс старения изоляции обмоток двигателя, а также появляются дополнительные потери в двигателе.
Другим широко распространенным видом статических преобразователей в асинхронном электроприводе являются тиристорные регуляторы напряжения (ТРН).
ТРН - традиционная система плавного пуска и управления АД путем регулирования действующего значения питающего напряжения посредством фазоимпульсного управления встречно-параллельными тиристорами в каждой фазе регулятора. Система ТРН-АД обеспечивает пуск асинхронного двигателя с ограничением пускового тока до уровня 2...3 номинальных значений. При этом, по сравнению с прямым пуском, уменьшаются электродинамические усилия в обмотках и связанное с ним механическое повреждение их изоляции. Однако данная система обладает существенным недостатком - значительное энерговыделение в двигателе в процессе пуска. Это явление объясняется тем, что физические процессы в двигателе такие же, как и при прямом пуске, поскольку частота напряжения на зажимах статорных обмоток двигателя равна частоте питающей сети. Простое снижение тока статора приводит к уменьшению момента двигателя по сравнению с режимом прямого пуска. Момент уменьшается в квадрате снижения тока в каждой точке характеристики. Снижение момента приводит к существенному увеличению времени пуска и, следовательно, к увеличению энергии потерь. Дополнительные потери вызываются протеканием токов 5-й гармоники по статорным обмоткам. Некоторое улучшение характеристик ТРН дает применение т.н. «квазичастотного» способа управления, при котором первая гармоника выходного напряжения имеет частоту ниже частоты сети и пульсации момента меньше. Это мероприятие дает положительный результат, так как позволяет осуществить предпусковую прокрутку агрегата при частотах 0 - 0,7 Гц [5]. Однако пуск АД все равно происходит в режиме «подтягивания» частоты вращения двигателя к выходной частоте ТРН. К тому же, реализовать такой способ управления трехфазным регулятором напряжения удается только до частоты 5-7 Гц, а далее приходится переходить на обычное регулирование напряжения частоты 50 Гц. Использование квазичастотного способа управления целесообразно при пуске нагруженных двигателей.
А
а)
б)
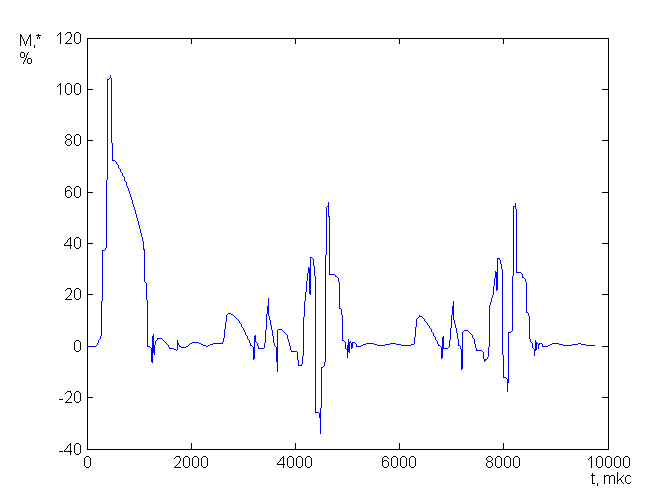
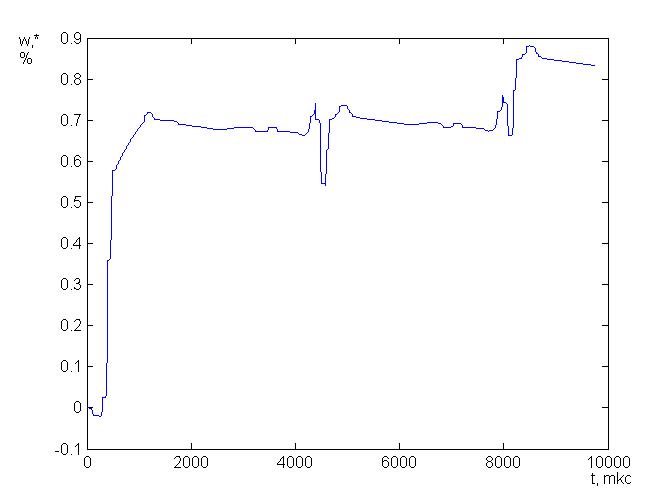
Рисунок 2 - Характеристики системы ТРН – АД в режиме квазичастотного управления:
а) - изменение момента; б) - изменение угловой скорости
нализ характеристик системы ТРН-АД при работе в режиме квазичастотного управления (рис. 2) показывает, что, несмотря на перспективность разработок систем ТРН-АД с возможностью квазичастотного управления, их широкое внедрение требует устранения или, по крайней мере, ограничения имеющихся негативных особенностей подобных преобразователей:
- значительные пульсации момента М(t) (рис. 2, а);
- неравномерность угловой скорости (t) (рис. 2, б);
- негативное влияние на питающую сеть и, как следствие, на соседних потребителей;
- повышенный уровень вибрации, вызванный знакопеременными моментами;
- повышенный уровень нагрева от высших гармоник;
- ограниченные возможности формирования требуемых характеристик M(t) без отрицательных участков.
Результаты моделирования (рис. 2) позволяют сделать вывод о целесообразности использования систем ТРН-АД с возможностью квазичастотного управления при формировании заданных пусковых характеристик в условиях тяжелого пуска АД. Однако для реализации этих возможностей необходимо обеспечить с помощью СУ автоматическое регулирование угла при изменении частоты
 и момента сопротивления Мс [4].
и момента сопротивления Мс [4].Как показано в работе [10], асинхронные двигатели общепромышленного исполнения являются малочувствительными к искажению формы питающего напряжения высокими гармоническими, за исключением третьей и кратных ей. Поэтому перспективными являются законы регулирования напряжения, позволяющие получить спектр кривой выходного напряжения без третьей и кратных ей гармоник [1, 3].
При этом задача улучшения спектра выходного напряжения преобразователя требуют выполнения схем регуляторов на вентилях с полным управлением, чтобы иметь возможность включать и выключать их в желаемые моменты времени. На рис. 3 представлены схемы преобразователей на ключах, позволяющие реализовать широтно-импульсное регулирование переменного напряжения.

Схема регулятора на рис. 3, а позволяет регулировать выходное напряжение вниз от номинального методом однократного или многократного широтно-импульсного управления, кривые выходных напряжений для которых приведены соответственно на рис. 4, а, б. При этом ключи К1 и К2 работают в противофазе, так что все время такта Тт существует цепь для протекания тока нагрузки, содержащей индуктивность. Схема регулятора на рис. 3, б позволяет выполнять комбинированное регулирование переменного напряжения как за счет амплитудной, так и за счет широтно-импульсной модуляции. Противофазное переключение ключей К1 и К2 обеспечивает переключение мгновенного значения выходного напряжения регулятора между уровнями U1 и U2, как видно из рис. 4, в. При необходимости уменьшения выходного напряжения регулятора ниже значения U2, в противофазе начинают переключаться ключи К2 и К3, обеспечивая многократное широтно-импульсное регулирование выходного напряжения, аналогично рис. 4, б. На основе этих принципов используют широтно-импульсное регулирование на несущей частоте, значительно превышающей (в число раз, называемое кратностью коммутации – Кт) частоту выходного напряжения. Это смещает гармоники напряжения, обусловленные регулированием, в область более высоких частот, что облегчает их фильтрацию на нагрузке [6].

Ключевые элементы для цепей регуляторов переменного напряжения могут реализовываться или встречно-параллельным включением полностью управляемых тиристоров – GTO-тиристоров, или диодно-транзисторными комбинациями, показанными на рис. 5. В схеме ключа на рис. 5, а на транзистор с диодного моста всегда поступает напряжение только необходимой (рабочей) полярности для коллекторного перехода транзистора. В схемах ключей на рис. 5, б, в нерабочая полярность напряжения на транзисторе снимается последовательными или параллельными диодами соответственно.
При наличии у источника входного напряжения собственной индуктивности это требует установки входного LC-фильтра. Например, при многократном широтно-импульсном способе регулирования выходного напряжения, при частоте коммутации в несколько килогерц, форма тока iн в нагрузке регулятора будет практически синусоидальной. При этом форма тока на входе регулятора будет иметь вид, представленный на рис. 6.
Регуляторы трехфазного напряжения с широтно – импульсным регулированием получают путем объединения трех однофазных регуляторов. При этом, используя свойство связности трехфазных нагрузок без нулевого провода, можно упростить схемы трехфазных регуляторов по сравнению с прямым суммированием однофазных регуляторов. При этом формы токов в фазах регулятора такие же, как у однофазных регуляторов, только с соответствующим временным сдвигом между фазами.
Выводы. Переход от нерегулируемого асинхронного электропривода к регулируемому, при имеющихся установленных АД общепромышленного исполнения, в условиях ограниченного диапазона изменения скорости вращения, целесообразно реализовать с использованием регуляторов напряжения в цепи статора. Наиболее простые и дешевые регуляторы с фазовым способом регулирования переменного напряжения и естественной коммутацией выполняются на вентилях с неполным управлением (тиристорах), но они имеют пониженное качество выходного напряжения и потребляемого из сети тока.
Для улучшения динамических свойств привода и гармонического состава тока и напряжения более предпочтительно использование регуляторов с широтно-импульсными способами управления. Такие регуляторы выполняются на вентилях с полным управлением, являются более сложными и дорогими, чем ТРН или регуляторы с вольтодобавкой, но дешевле преобразователей частоты со звеном постоянного тока и могут обеспечивать достаточно высокое качество выходного напряжения и потребляемого тока во всем диапазоне регулирования.
ЛИТЕРАТУРА
- Браславский И.Я., Валек В.М. Расчет статических характеристик асинхронного привода с ШИП в статорных цепях // Реферативный научно- техн. сб.: Электротехническая промышленность. Сер. привод, 1978, №4, С. 4-6.
- Бармин А., Ташлицкий М. Преобразователи частоты фирмы Siemens // СТА 4/2000. - С. 7-19
- Глазенко Т.А., Хрисанов В.И. Полупроводниковые системы импульсного асинхронного электропривода малой мощности. - Л.: Энергоатомиздат, Ленингр. отд-ние, 1983. – 176 с.
- Гладырь А.И. Технологические предпосылки применения пусковых систем с квазичастотным управлением // Проблемы создания новых машин и технологий. Сб. научных трудов КГПУ. – Выпуск 2 (9). – Кременчуг: КГПУ. – 2000. – С. 84-88.
- Закладной А.Н., Праховник А.В., Соловей А.И. Энергосбережение средствами промышленного электропривода. – К.: «ДИЯ», 2001. – 343 с.
- Зиновьев Г.С. Основы силовой электроники: Учебник. – Новосибирск: Изд-во НГТУ, 2000. – Ч. 2 – 197 с.
- Латышко В.Д., Шамрай Ф.А., Клешнёв Д.Ю. Системы управления силовыми электрическими приводами. Анализ решений. Материалы компании ОМЗ-КРАН, Санкт-Петербург, 2005. – 37 с.
- Лукевски М. Сетевые дроссели. Elhand transformatory, ul. PCK 22, 42-700 Lubliniec, e-mail: info@elhand.com.pl.
- Мерфи Дж. Тиристорное управление двигателями переменного тока: Пер. с англ. – М.: Энергия, 1979. – 254 с.
- Регулируемые асинхронные электродвигатели в сельскохозяйственном производстве. Под ред. Д.Н. Быстрицкого. М.: Энергия, 1975. – 400 с.
- Соколов И.В. К вопросу об энергосбережении в асинхронном регулируемом электроприводе // Материалы Государственного учреждения высшего профессионального образования «Белорусско-Российский университет» Брест, 2005, С. 223.
Стаття надійшла 15.04. 2006р.
Рекомендовано до друку
д.т.н., проф. Родькіним Д.Й.
Вісник КДПУ. Випуск 4/2006 (39). Частина 1