
Вестник Брянского государственного технического университета. 2011. №1(29)
| Вид материала | Документы |
- Вестник Брянского государственного технического университета. 2011. №4(32), 114.16kb.
- Вестник Брянского государственного технического университета. 2011. №3(31), 389.65kb.
- Вестник Брянского государственного технического университета. 2011. №3(31), 141.24kb.
- Вестник Брянского государственного технического университета. 2011. №2(30), 81.9kb.
- Вестник Брянского государственного технического университета. 2010. №2(26), 83.85kb.
- Вестник Брянского государственного технического университета. 2008. №1(17), 121.05kb.
- Вестник Брянского государственного технического университета. 2008. №3(19), 168.61kb.
- Вестник Брянского государственного технического университета. 2008. №3(19), 138.83kb.
- Вестник Брянского государственного технического университета. 2008. №3(19), 114.86kb.
- Вестник Брянского государственного технического университета. 2011. №2(30), 213.37kb.
Вестник Брянского государственного технического университета. 2011. № 1(29)
УДК 621.865.8
О.Н.Крахмалев, А.П.Болдырев
МОДЕЛИРОВАНИЕ ОБОБЩЁННЫХ СИЛ,
ДЕЙСТВУЮЩИХ НА ЗВЕНЬЯ МАНИПУЛЯЦИОННЫХ СИСТЕМ
Получены в матричной форме аналитические выражения для определения обобщённых сил от основных силовых факторов, действующих на звенья манипуляционных систем. Сформирована правая часть уравнения движения манипуляционных систем.
Ключевые слова: манипуляционные системы, уравнение движения, обобщённые силы.
При моделировании динамики манипуляционных систем (МС) промышленных роботов (ПР) методом, основывающимся на уравнении Лагранжа 2-го рода, возникает необходимость в определении обобщённых сил, действующих на звенья МС. Математическая модель, в которой МС представлена системой твёрдых тел (СТТ), соединённых между собой кинематическими парами 5-го класса и образующих разомкнутую кинематическую цепь, имеет вид [1]
.. . . .
[M]{q} + [S]{q2} + 2[K]{qiqj} = {Q} , (1)
где [M], [S] и [K] – матричные коэффициенты, соответствующие инерционным свойствам моделируемой системы; {Q} - вектор обобщённых сил, действующих на звенья МС, элементами которого Qi являются суммы всех обобщённых сил, действующих на систему, по соответствующей обобщённой координате qi; i=(1,…,n), n – количество звеньев системы.
Каждый элемент вектора {Q} можно разложить на составляющие, определяемые основными силовыми факторами, действующими на систему и определяющими её динамику. Например,
Qi= QFi+ QGi+ QPi, i=(1,…,n),
где QFi - обобщённая сила от внешних нагрузок (F); QGi – обобщённая сила от сил тяжести звеньев (G); QPi – усилие, развиваемое приводом i-го звена (QPi=Pi), или векторно:
{Q} = {QF} + {QG} + {QP} .
Обобщённая сила Qi, соответствующая координате qi, определяется как коэффициент (скалярная величина) при вариации δqi в выражении для элементарной работы δW всех приложенных к МС сил: δW=∑Qiδqi.
Определим обобщённую силу Qi от действия внешних нагрузок (F). Заменим систему сил Fk, действующих на k-е звено, главным вектором Rk (Rk = ∑ Fk) и главным моментом Mk (Mk = ∑ rkxFk) [2]. За центр приведения удобнее всего принимать центр тяжести звена С, который будем определять расширенным радиусом-вектором rck(k) в системе Sk. Главный вектор Rk и главный момент Mk в инерциальной системе координат S0 будем представлять четырёхмерными векторами:
Rk = [Rkx Rky Rkz 0 ]T ,
Mk = [Mkx Mky Mkz 0]T .
Запишем выражения для элементарных работ, совершаемых главным вектором и главным моментом на возможном перемещении k-го звена:
δWRk = Rk δrсk(0),
δWMk = Mk δφk(0),
где δrсk(0) – возможное перемещение центра тяжести k-го звена (точка приведения сил) в инерциальной системе координат S0; δφk(0) – возможный поворот k-го звена в инерциальной системе координат S0 (вектор δφk коллинеарен вектору возможной угловой скорости δωk k-го звена).
Выражение для возможных перемещений точек приложения сил получим из функции положения [3]. Для выбранной точки С, жёстко связанной с k-м звеном, функция положения имеет вид
_(o) _ _(k)
rсk = Aоk(q) rсk , (2)
где rck(k)- расширенный (4х1) радиус-вектор точки C в системе координат Sk, связанной с k-м звеном (подвижная, неинерциальная система отсчёта); rck(0)- расширенный (4х1) радиус-вектор точки C в системе координат S0, связанной с основанием (инерциальная система отсчёта); A0k(q) – матрица (4х4) преобразования однородных координат, является функцией обобщённых координат qi (i=1,…,k)) [4].
Из выражения (2) для функции положения точки С множество возможных перемещений δrck(0) этой точки будет иметь вид
_(0) k ∂A0k _(k)
δrck = ∑ −−− rck δqi .
i = 1 ∂qi
В развёрнутом виде векторы δrсk(о)и δφk(о) могут быть представлены выражениями [5]
∂A0k ∂A0k ∂A0k
δrсk(о) = ¯¯¯¯ rсk(k) δq1 + ¯¯¯¯ rсk(k) δq2 + … + ¯¯¯¯ rсk(k) δqk ,
∂q1 ∂q2 ∂qk
δφk(o) = A01Ө1δq1 + A02Ө2δq2 + … + A0kӨkδqk .
Өi (i= (1,…,k)) представляет собой единичный вектор относительного поворота i-го звена и для принятого расширенного способа задания координат имеет вид
Өi = [0 0 δi 0]T ,
г
 де 1 – для вращательной кинематической пары;
де 1 – для вращательной кинематической пары;δi =
0 – для поступательной кинематической пары.
С учётом изложенного, сгруппировав члены при δqi (i=(1,…,k)), запишем выражение для элементарной работы δWk внешних сил Fk, действующих на k-е звено, представленных главным вектором Rk и главным моментом Mk: δWk= δWRk + δWMk , или
∂A0k
δWk = (Rk ¯¯¯¯ rсk(k) + Mk A01Ө1) δq1 +
∂q1
∂A0k
+ (Rk ¯¯¯¯ rсk(k) + Mk A02Ө2) δq2 + … + (3)
∂q2
∂A0k
+ (Rk ¯¯¯¯ rсk(k) + Mk A0kӨk) δqk ,
∂qk
или в матричной записи с учётом свойства скалярного произведения двух векторов (V1○V2= tr[V1V2T]=tr[V2 V1T], tr - след матрицы):
∂A0k
δWk = tr [Rk rсk(k)T ¯¯¯¯ + Mk Ө1TA01T]δq1 +
∂q1
∂A0kT
+ tr [Rk rсk(k)T ¯¯¯¯ + Mk Ө2TA02T]δq2 + … +
∂q2
∂A0kT
+ tr [Rk rсk(k)T ¯¯¯¯ + Mk ӨkTA0kT]δqk .
∂qk
В окончательном виде элементарную работу внешних сил представим выражением
∂A0kT
δWk = tr [FRk ¯¯¯¯ + F1Mk A01T]δq1 +
∂q1
∂A0kT
+ tr [FRk ¯¯¯¯ + F2Mk A02T]δq2 + … + (4)
∂q2
∂A0kT
+ tr [FRk ¯¯¯¯ + FkMk A0kT]δqk ,
∂qk
где FRk и FiMk - соответственно матрицы сил и моментов, определяемые выражениями
-


Rkxxckk
Rkxyckk
Rkxzckk
Rkx
FRk = Rk rсk(k)T =
Rkyxckk
Rkyyckk
Rkyzckk
Rky
,
Rkzxckk
Rkzyckk
Rkzzckk
Rkz
0
0
0
0

-
0
0
δi Mkx
0
FiMk = MkӨiT=
0
0
δi Mky
0
.
0
0
δiMkz
0
0
0
0
0
Обобщённая сила Qi, отнесенная к соответствующей координате, равна коэффициенту перед вариацией δqi (i=(1,…,n)) этой координаты. Следовательно, составляющие обобщённой силы QFi (i=(1,…,n)) от действия внешних сил (Fk), представленных главным вектором Rk и главным моментом Mk (k=(1,…,n)), можно выделить из уравнения (3) в форме выражений, стоящих перед соответствующими вариациями обобщённых координат δqi. Полная обобщённая сила QFi от действия всей внешней нагрузки (F=∑Fk, k=(1,…,n)) вычисляется суммированием по всем звеньям МС соответствующих составляющих полной элементарной работы. Полная элементарная работа
δW = ∑δWk= ∑QFi δqi , (k,i=(1,…,n)). (5)
Учитывая, что ∂A0i/∂qi+1= 0, выражение для QFi можно представить в следующем виде:
n ∂A0kT
QFi = ∑ tr [ FRk ¯¯¯¯ + FiMk A0iT] . (6)
k = i ∂qi
Выражение для вектора обобщённых сил от внешней нагрузки QF будет иметь вид


-
n ∂A0iT
∑ tr [ FRi ¯¯¯¯ + F1Mi A01T]
i =1 ∂q1
QF =
n ∂A0iT
∑ tr [ FRi ¯¯¯¯ + F2Mi A02T]
i =2 ∂q2
. (7)
. . . . . . . . . . .
n ∂A0iT
∑ tr [ FRi ¯¯¯¯ + FnMi A0nT]
i = n ∂qn
Если скалярное произведение векторов в выражении (3) для элементарной работы внешних сил, действующих на k-е звено, заменить на матричное произведение по правилу V1○V2= V1T V2, то после суммирования по формуле (5) получим выражение для обобщённой силы от действия всей внешней нагрузки в виде
n ∂A0k
QFi = ∑ (RkT ¯¯¯¯ rсk(k) + MkTA01Ө1) . (8)
k = i ∂q1
Выражение (8) имеет некоторые вычислительные преимущества перед выражением (6).
Обобщённые силы от действия консервативных (потенциальных) сил, к которым относятся силы тяжести звеньев и перемещаемого груза (инструмента), а также силы упругости, возникающие в элементах конструкции манипулятора, могут быть определены дифференцированием выражения для потенциальной энергии W МС по соответствующей обобщённой координате:
∂ W
QWi = ¯¯¯ , i = (1, …,n) . (9)
∂qi
Потенциальная энергия МС в гравитационном поле может быть представлена следующим выражением:
n n _ _
W = ∑ Wk = ∑ fgk(о) (A0k rсk (k)) , (10)
k=1 k=1
_ _
где rсk (k) = [xck yck zck 1]T – радиус- вектор центра тяжести k-го звена в системе Sk; fgk(о) = [fgkx fgky fgkz 0]T – вектор силы тяжести k-го звена в системе S0.
З
n _ _T T n T
W = ∑ tr [fgk(о) rсk (k)A0k] = ∑ tr [FGk A0k] , (11)
k=1 k=1
аменим в выражении (10) скалярное произведение векторов его матричным представлением
где через FGk обозначена матрица силы тяжести k-го звена, определяемая следующим образом:
-
fgkxxck
fgkxyck
fgkxzck
fgkx
FGk =
fgkyxck
fgkyyck
fgkyzck
fgky
. (12)
fgkzxck
fgkzyck
fgkzzck
fgkz
0
0
0
0
Для определения обобщённых сил от сил тяжести звеньев QGi в уравнение (9) необходимо подставить выражение (11). С учётом выражения (12) получим
n ∂A0kT
QGi = ∑ tr [FGk ¯¯¯¯ ] . (13)
k = i ∂qi
Вектор обобщённых сил от сил тяжести QG с учётом полученного выражения (13) может быть представлен в матричном виде [см. выражение (7)]. Стоит отметить, что выражение (13) соответствует выражению (6) в части задания обобщённой силы от главных векторов внешней нагрузки. Поэтому, рассматривая силу тяжести как составляющую внешней нагрузки, для вычисления обобщённых сил можно использовать только общее выражение (6) или (8).
Обобщённые силы QP, соответствующие силам Pi (i=(1,…,n)), развиваемым приводами, равны самим этим силам, так как
δWP = P1δq1 + P2δq2 + … + Pnδqn .
Полную обобщённую силу, действующую на МС, будем обозначать вектором Q размерности nx1, элементами которого Qi (i=(1,…,n)) являются суммы всех обобщённых сил, действующих на МС, по соответствующей обобщённой координате (qi):
{Q} = {QF} + {QG} + {QP} .
Рассмотрим использование полученных аналитических выражений для определения обобщённых сил от сил тяжести и внешней нагрузки на примере манипулятора с 3 звеньями. Кинематическая схема такого манипулятора (рис.1) была реализована в ПР «Универсал -15».
 Рассмотрим движение манипулятора по прямолинейной траектории, часто используемой при программировании промышленных роботов. Закон движения, определяемый изменением обобщённых координат во времени (qi= qi(t), i=1…3), представлен на рис.2. Такая форма закона движения типична для промышленных роботов (равноускоренный разгон с последующим торможением).
Рассмотрим движение манипулятора по прямолинейной траектории, часто используемой при программировании промышленных роботов. Закон движения, определяемый изменением обобщённых координат во времени (qi= qi(t), i=1…3), представлен на рис.2. Такая форма закона движения типична для промышленных роботов (равноускоренный разгон с последующим торможением).Исходные данные для расчёта: l1=0,6м; l2=0,28м; l3=0,28м; m1=20кг; m2=10кг; m3=5кг; rс1(1) = [0 0 l1/2 1]T; rс2(2) = [l2 0 0 1]T; rс3(3) = [0 0 l3 1]T; R1(0)=R2(0)=R2(0)=[10 10 10 0]T Н; М1(0)=М2(0)=М2(0)=[1 1 1 0]T Нм,
г
Рис.1. Кинематическая схема манипулятора
де l1, l2, l3 и m1, m2, m3 – длины и массы соответствующих звеньев; rсi (i) - радиус- вектор центра тяжести соответствующего звена в локальной системе координат, связанной с этим звеном; Ri(0), Мi(0) – соответственно главный вектор и главный момент внешней нагрузки, заданные в неподвижной (инерциальной) системе координат.

Рис. 2. Закон движения МС
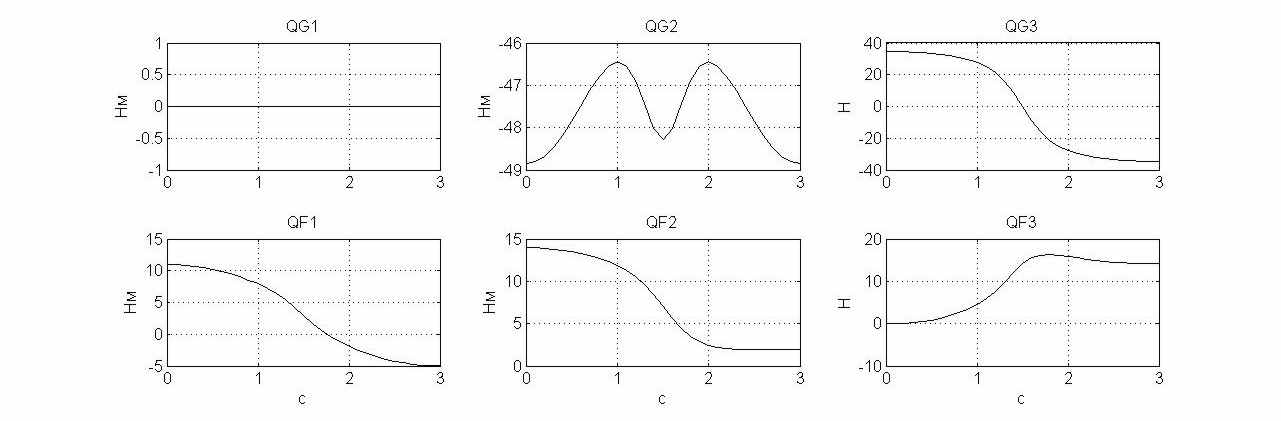
Для расчётной схемы, представленной на рис.1, методами кинетостатики получены аналитические выражения для обобщённых сил от сил тяжести QGi (i=1,2,3), действующих на звенья. Вектор QG обобщённых сил от сил тяжести будет иметь вид

-
0
{QG} =
- (m2l2 + m3(l2+ l3+ q3))gCosq2
.
- m3gSinq2
Результаты расчёта обобщённых сил от сил тяжести (QGi) и внешней нагрузки (QFi) представлены на рис.3.
c
c
c
Рис. 3. Обобщённые силы от сил тяжести и внешней нагрузки
Представленные в статье аналитические выражения для обобщённых сил от основных силовых факторов позволяют сформировать правую часть уравнения (1), описывающего движение манипуляционной системы.
СПИСОК ЛИТЕРАТУРЫ
- Крахмалев, О.Н. Моделирование движения манипуляционных систем с упругими звеньями / О.Н.Крахмалев, А.П.Болдырев, Л.И.Блейшмидт // Вестн. БГТУ.-2010.-№3. -С.31-38.
- Айзерман, М.А. Классическая механика : учеб. пособие / М.А. Айзерман.– 2-е изд., перераб. – М.: Наука, 1980. – 368 с.
- Блейшмидт, Л.И. Вычисление кинематических параметров манипуляционных систем промышленных роботов / Л.И. Блейшмидт, О.Н.Крахмалев. – Брянск : БИТМ, 1991. – Деп. в ВИНИТИ, №1617 –В91.
- Блейшмидт, Л.И. Геометрия манипуляционных систем промышленных роботов / Л.И. Блейшмидт, О.Н.Крахмалев. – Брянск : БИТМ, 1991. – Деп. в ВИНИТИ, №1618 –В91.
- Блейшмидт, Л.И. Основы механики манипуляционных систем промышленных роботов : метод. указ. по лекц. курсу / Л.И. Блейшмидт. - Брянск : БИТМ, 1990. -64с.
Материал поступил в редколлегию 19.01.11.