
Улучшение охраны труда водителей транспортных средств в апк за счёт снижения риска травмирования при торможении
| Вид материала | Автореферат |
- Примерная программа подготовки водителей транспортных средств категории "C" общие положения, 721.06kb.
- Правила охраны труда при эксплуатации и техническом обслуживании автомобилей и других, 888.02kb.
- Примерная программа переподготовки водителей транспортных средств категории "B", 488.43kb.
- 1. Экономическая сущность страхования, классификация страхования, 611.87kb.
- Улучшение условий и безопасности труда операторов мобильных колесных машин в сельскохозяйственном, 305.37kb.
- Улучшение условий и охраны труда за счет средств фсс, 26.84kb.
- Приказ 20 января 2009 г. №6 Овведении в действие Примерных программ переподготовки, 2558.7kb.
- Прогрессивные методы подготовки водителей транспортных средств, 15.67kb.
- Краевая целевая программа "улучшение условий и охраны труда в приморском крае" на 2007, 207.95kb.
- Приложение №10 правил а обеспечения работников средствами индивидуальной защиты и нормы, 214.29kb.
На правах рукописи
Копылов Сергей Александрович
УЛУЧШЕНИЕ ОХРАНЫ ТРУДА ВОДИТЕЛЕЙ ТРАНСПОРТНЫХ СРЕДСТВ
В АПК ЗА СЧЁТ СНИЖЕНИЯ РИСКА ТРАВМИРОВАНИЯ
ПРИ ТОРМОЖЕНИИ
Специальность 05.26.01 - Охрана труда (отрасль АПК)
А в т о р е ф е р а т
диссертации на соискание ученой степени
кандидата технических наук
Санкт – Петербург – Пушкин – 2011
Работа выполнена в ГОУ ВПО «Орловский государственный университет»
Научный руководитель кандидат технических наук, доцент
Загородних Анатолий Николаевич
Официальные оппоненты заслуженный деятель науки и техники РФ,
доктор технических наук, профессор
Шкрабак Владимир Степанович
кандидат технических наук
Кокарев Святослав Петрович
Ведущая организация: Всероссийский научно-исследовательский институт социального развития села ФГОУ ВПО Орёл ГАУ
Защита диссертации состоится «25 » марта 2011 г. в 13.30 на заседании диссертационного совета Д220.060.05 при ФГОУ ВПО “Санкт – Петербургский государственный аграрный университет”, 196601, Санкт – Петербург – Пушкин, Академический проспект, д. 23, ауд. 2.529. Факс (8- 812) 465-05-05, электронный адрес: uchsekr@ spbgau.ru
С диссертацией можно ознакомиться в библиотеке ФГОУ ВПО «Санкт – Петербургский государственный аграрный университет»
Автореферат разослан « »________2011г.
Ученый секретарь
диссертационного совета
доктор технических наук, профессор Т.Ю.Салова
Общая характеристика диссертационной работы
Актуальность темы. Развитие агропромышленного комплекса ( АПК ) сопровождается увеличением объема перевозок грузов сельскохозяйственного назначения на транспорте.
По данным Федерального государственного научного учреждения «Всероссийский научно-исследовательский институт охраны труда» ежегодно из общего числа погибших в АПК более 20% составляют водители транспортных средств, причём в более 60% случаев, источником их травмирования стали транспортные происшествия (ТП), которые происходят в основном из-за несовершенства системы сигнализации о торможении транспортных средств. В настоящее время она базируется на простом принципе: сигнал от педали тормоза зажигает стоп-сигналы и никак не реагирует на другие способы торможения, что приводит к столкновениям транспортных средств. Официальная статистика информирует, что столкновения транспортных средств составляют четвертую часть (27,0 %) от общего количества случаев ТП, причём основная их доля 55,6 % приходится на лобовые, фронтальные и задние удары.
Разработка устройства по фиксированию момента начала торможения транспортных средств с более высокой точностью и визуальной информативностью позволит улучшить условия и охрану труда водителей за счёт снижения столкновений транспортных средств, что позволит исключить их травмирование. Это и определяет актуальность выбранного направления исследования.
Цель работы - улучшение охраны труда водителей транспортных средств в АПК за счет снижения риска травмирования при торможении.
Задачи исследования:
1. Провести анализ использования транспортных средств и автомобильных дорог агропромышленного комплекса;
2. Провести анализ аварийности транспортных средств, факторов определяющих производственный травматизм и методов оценки безопасности труда водителей;
3. Провести логико-графический анализ возникновения опасностей столкновения транспортных средств, риска транспортного происшествия ;
4. Разработать устройство по фиксированию момента начала торможения транспортного средства;
5. Провести экспериментальные исследования по оценке достаточности мер по снижению возможности проявления риска столкновения транспортных средств и процесса торможения с различными системами визуального отражения;
6. Разработать учебный стенд для исследования параметров сигнализации торможения транспортных средств;
7. Провести расчет ожидаемой экономической эффективности от внедрения устройства сигнализации торможения транспортного средства.
Объект исследования. Безопасность и охрана труда водителей транспортных средств.
Предмет исследования. Закономерности влияния процесса возникновения опасностей столкновения транспортных средств при визуальном отражении их торможения на риск травмирования водителей.
Научная новизна:
- разработана методология разработки устройства по фиксированию момента начала торможения транспортного средства с более высокой точностью и визуальной информативностью;
- предложен, применительно к технетическому устройству, показатель опасноспособности, позволяющий определить соблюдение требований предъявляемых к нему;
- разработана бальная методика лингвистической оценки показателей транспортного риска столкновения транспортных средств по параметрам характеризующим возможность его проявления при визуальном отражении процесса их торможения;
- проведена экспертная и экспериментальная оценка нового устройства в сравнении со штатной системой сигнализации торможения транспортного средства.
Практическая ценность и реализация результатов работы.
Практическую ценность работы представляет разработанное устройство по фиксированию момента торможения транспортного средства с более высокой точностью и визуальной информативностью. Результаты исследований могут быть использованы конструкторами при разработке и совершенствовании систем визуального отражения процесса торможения транспортных средств.
Результаты работы реализованы в натурном образце функционирующего устройства, экспериментальном стенде сигнализации торможения транспортного средства, а также в разработанном методе комплексного исследования устройств визуального отражения процесса торможения транспортных средств на основе лингвистической оценки показателей транспортного риска.
К защите предъявляются следующие научные результаты:
1. Анализ используемых транспортных средств и автомобильных дорог агропромышленного комплекса;
2. Анализ аварийности транспортных средств, факторов определяющих производственный травматизм и методов оценки безопасности труда водителей;
3. Логико-графический анализ возникновения опасностей столкновения транспортных средств, риска транспортного происшествия ;
4. Устройство по фиксированию момента начала торможения транспортного средства;
5. Экспериментальные исследования по оценке достаточности мер по снижению возможности проявления риска столкновения транспортных средств и процесса торможения с различными системами визуального отражения;
6. Учебный стенд для исследования параметров сигнализации торможения транспортных средств;
7. Расчет ожидаемой экономической эффективности от внедрения устройства сигнализации торможения транспортного средства.
Внедрение. Устройство по фиксированию момента торможения транспортного средства внедрено в производство и используется в ООО «Автомобилист» Курской области Конышевского района.
Метод комплексного исследования устройств торможения на основе лингвистической оценки показателей транспортного риска внедрен в научные исследования ФГНУ «Всероссийский НИИ охраны труда» г.Орел.
Стенд сигнализации торможения используется в учебном процессе при подготовке специалистов, обучающихся в ОрёлГТУ по специальности 170900 «Подъёмно-транспортные, строительные, дорожные машины и оборудование», 150200 «Автомобили и автомобильные хозяйства» в лекциях, лабораторных и практических занятиях, а так же при проведении курсового и дипломного проектирования.
Апробация. Основные положения диссертационной работы доложены, обсуждены и одобрены на следующих международных научно-практических конференциях: III международном конгрессе «Безопасность и охрана труда» (2005 г.), г. Москва; 10-й научно-технической конференции преподавателей, сотрудников и аспирантов «Неделя науки –2005», Орел: Орел ГТУ, 2005; Всероссийской научно-практической конференции «Безопасность через образование», Брянск: БГУ,2006; Научно-технической конференции преподавателей, сотрудников и аспирантов «Неделя науки», Орёл: ГОУ ВПО ОГУ, 2008-2009; Всероссийской научно-практической конференции «Требования безопасности к пестицидам и агрохимикатам», Орёл: ФГОУ ВПО Орёл ГАУ, 2009; Всероссийской научно-практической конференции «Концепция безопасности жизнедеятельности в агропромышленном комплексе», Орёл: ФГОУ ВПО Орёл ГАУ, 2009; Учёном Совете Санкт-Петербургского государственного аграрного университета.
Публикации. Основное содержание диссертации опубликовано в 10 печатных работах, подана заявка на изобретение.
Структура и объем диссертации. Диссертация содержит введение, шесть глав, общие выводы, список литературы из 102 наименований и 5 приложений. Основной текст изложен на 149 страницах и включает 32 рисунка и 14 таблиц.
Содержание работы
Во введении обоснована тема диссертации, отмечена научная новизна и изложены основные положения выносимые на защиту.
В первой главе «Состояние проблемы и выбор направления исследования» дан анализ используемых транспортных средств и автомобильных дорог Агропромышленного комплекса (АПК), который позволил установить, что основную часть сельскохозяйственных грузов перевозят автомобильным (до 80 %) и тракторным ( 20…27% ) транспортом.
Выполнен анализ аварийности на автомобильных дорогах, который позволил установить, что уровень транспортного травматизма в стране остается крайне высоким и находится в пределах 32…35 тыс. аварий со смертельным исходом в год. Наблюдается рост количества ТП в расчете на 10 тыс. единиц транспортных средств (54,4). Столкновения транспортных средств составили четвертую часть (27,0 %) всех ТП, причем основная их доля – 55,6 % приходится на лобовые, фронтальные или задние удары.
Дан анализ факторов определяющих производственный травматизм на транспортных средствах, который позволил выявить несовершенство систем сигнализации транспортных средств, срабатывающих только лишь при нажатии на педаль тормоза и никак не реагирующих на другие способы торможения, например двигателем. Таким образом её отсутствие создаёт один из главных факторов опасности.
Проведён анализ существующих систем и устройств по определению отрицательного ускорения, который показал, что существуют технические разработки устройств по определению отрицательного ускорения и включения стоп-сигналов. Однако, большинство устройств имеет ряд недостатков, например, низкую эксплуатационную надежность, большую инерционность и срабатывание в ограниченных условиях движения.
Рассмотрены существующие методы оценки аварийности, травматизма и безопасности труда водителей транспортных средств таких учёных, как: Шкрабака В.С., Лапина А.П., Юркова М.М., Копылова Г.И., Полишко Г.Ю., Гальянова И.В, Илларионова В.А., Купермана А.И., Мишурина В.М., Амбарцумяна В.В., Олянича Ю.Д., Ермакова Ф.Х., Рыбина А.Л., Шкрабака В.В., Афанасьева В.Н., Галушко В.Г., и других., это позволило установить, что применение существующих показателей и оценок безопасности труда операторов транспортных средств не позволяют в полной мере использовать методический арсенал допускового контроля безопасности труда с целью эффективного управления ею из-за невозможности определения вида и параметров корреляционных функций процессов изменения этих показателей и оценок, что требует корректировки методических подходов к данной проблеме.
Во второй главе «Теоретические исследования процесса возникновения опасностей столкновения транспортных средств при визуальном отражении процесса их торможения» дан анализ причин транспортных аварий, который показал что их возникновение и развитие характеризуется комбинацией случайных локальных событий, возникающих с различной частотой на разных стадиях аварии. Для выявления причинно-следственных связей между этими событиями были использованы логико-графические методы.
Для анализа возникновения опасностей столкновения транспортных средств нами были использованы диаграммы в форме дерева событий, а с помощью предварительно построенных диаграмм – деревьев были получены математические модели, например, аварийности и травматизма.
Создание дерева заключалось в определении его структуры: а) элементов – головного события (происшествия) и ему предшествующих предпосылок; б) связей между ними – логических условий, соблюдение которых необходимо и достаточно для его возникновения.
Выявление возможных происшествий было увязано с логикой нежелательного высвобождения и распространения энергии, а предпосылками и условиями их появления с процессами, сопровождающими изменение свойств рассматриваемой системы .
Определение соблюдения требований, предъявляемых к техническому устройству, проводилось при помощи показателя, именуемого опасноспособностью.
Математическое описание способности технического устройства создавать воздействия послекритического уровня становится возможным в результате комбинирования эксергетического и психофизического подходов к интерпретации техногенных воздействий. Эксергия в общепринятом смысле представляет собой максимальную часть энергии термодинамической системы, которая может быть превращена в работу при переходе из текущего состояния в состояние равновесия с внешней средой. Выражение для эксергии теплоты имеет вид:
 , (2.1)
, (2.1)где EQ — эксергия теплоты; Q — количество теплоты в термодинамической системе; Т0 — температура внешней среды; Т — текущая температура в термодинамической системе; kQ — коэффициент пропорциональности.
Распространение понятия эксергии на техногенные воздействия приводит к введению аналогичного понятия. Эксергия воздействия послекритического уровня:
 , (2.2)
, (2.2)где
 — количество эквивалентной энергии, заменяющее собой максимальное количество вещества, способного участвовать в воздействии, или максимальное количество энергии, способной участвовать в техногенном воздействии; D — текущее значение создаваемой дозы; Dкр — критическое значение внешней дозы техногенного воздействия.
— количество эквивалентной энергии, заменяющее собой максимальное количество вещества, способного участвовать в воздействии, или максимальное количество энергии, способной участвовать в техногенном воздействии; D — текущее значение создаваемой дозы; Dкр — критическое значение внешней дозы техногенного воздействия.При анализе технических устройств связанных с процессом визуального отражения информации, данные о восприятии световой энергии, полученные в разное время исследователями Бугером, Вебером, Фехнером, позволили сформулировать обобщение, отражающее изменение светового восприятия водителем транспортного средства в зависимости от изменения светового раздражителя:
 , (2.3)
, (2.3)где ∆L— приращение восприятия; a — коэффициент пропорциональности; ∆R— приращение раздражителя; R — раздражитель.
Если предположить, что в техногенном воздействии раздражителем является эксергия, а восприятие сопровождается эксергетическими эффектами, то комбинирование эксергетического и психофизического подходов приводит к следующей формуле:
 , (2.4)
, (2.4)где ∆ω — эксергетический эффект техногенного воздействия.
Эксергетический эффект техногенного воздействия при бесконечно малом изменении создаваемой дозы:
 , (2.5)
, (2.5)Эксергия воздействия послекритического уровня определяется той частью энергии, которая соответствует переходу технетического компонента из состояния, способного к созданию послекритического воздействия, в состояние с критическим воздействием. Показатель способности технического устройства создавать техногенные воздействия послекритического уровня приобретает универсальный характер после интегрирования выражения:
 , (2.6)
, (2.6)где Dγ,ε max — создаваемая доза, которая соответствует максимальному количеству вещества или энергии техногенного компонента, способному участвовать в воздействии; Dγ,ε kp — критическое значение внешней дозы техногенного энергетического воздействия.
Показатель способности технетического компонента создавать техногенные воздействия послекритического уровня получает наименование опасноспособности. Опасноспособность имеет однотипное количественное выражение для разных техногенных воздействий и измеряется в джоулях.
Способность технического компонента создавать опасное техногенное энергетическое воздействие:
 или
или  или
или  (2.7)
(2.7)где
 — максимальное количество энергии, способное участвовать в техногенном энергетическом воздействии; Dε тах — создаваемая доза, соответствующая максимальному количеству энергии; Dε кр - критическое значение внешней дозы техногенного энергетического воздействия; Wmax — максимальное количество энергии; Dε пр — предельно допустимое значение внешней дозы техногенного энергетического воздействия; П ε тах — максимальное значение параметра энергетического воздействия; П ε пр — предельно допустимое значение параметра энергетического воздействия.
— максимальное количество энергии, способное участвовать в техногенном энергетическом воздействии; Dε тах — создаваемая доза, соответствующая максимальному количеству энергии; Dε кр - критическое значение внешней дозы техногенного энергетического воздействия; Wmax — максимальное количество энергии; Dε пр — предельно допустимое значение внешней дозы техногенного энергетического воздействия; П ε тах — максимальное значение параметра энергетического воздействия; П ε пр — предельно допустимое значение параметра энергетического воздействия.Определение опасноспособности технических систем проводилось в несколько стадий. Для оценки опасности столкновения транспортных средств при визуальном отражении процесса их торможения выделялись следующие стадии:
1. Системно-логического представления технологии процесса столкновения транспортных средств.
2. Идентификации техногенных воздействий, акцентирующейся на источниках воздействия.
3. Отнесения технических компонентов к неопасным или опасным.
4. Вычисление опасноспособности технической системы. Опасноспособность технического компонента, создающего несколько разновидностей энергетических воздействий,
 , (2.8)
, (2.8)где I, J— количество разновидностей энергетических воздействий, создаваемых техническим компонентом; i, j — текущий номер энергетического воздействия.
Опасноспособность технической системы представляет собой сумму опасноспособностей входящих в ее состав технических компонентов:
 , (2.9)
, (2.9) где К— количество технических компонентов, входящих в состав технической системы и создающих или способных создавать опасные воздействия; к — текущий номер компонента технической системы исходного шага соподчиненности.
Максимальное количество энергии, способное участвовать в техногенном воздействии технического устройства, может быть уменьшено введением в техническую систему защитных компонентов. Опасноспособность технического компонента, создающего энергетические воздействия при наличии защитных компонентов, снижается до значения:
 , (2.10)
, (2.10)где ωγzi — способность технического компонента создавать опасное i-е воздействие при наличии защитных компонентов; ωγzj — способность технического компонента создавать опасное j-e энергетическое воздействие при наличии защитных компонентов.
5. Приведение опасноспособности технической системы к допустимому значению.
Анализ дерева происшествий связан с определением возможности появления или не появления головного события – происшествия конкретного типа. Данные условия устанавливались путем выделения из всего массива исходных предпосылок двух подмножеств, реализация которых либо приводит, либо не приводит к возникновению головного события. Такие подмножества делятся на аварийные сочетания предпосылок, образующие в совокупности с условиями их появления каналы прохождения сигнала до этого события, и отсечные сочетания, исключающие условия формирования таких путей к головному событию. Самым удобным способом выявления условий возникновения и предупреждения происшествий явилось выделение из таких подмножеств так называемых «минимальных сочетаний событий», т.е. тех из них, появление которых минимально необходимо и достаточно для достижения желаемого результата.
Минимальное пропускное (аварийное) сочетание рассматривалось как набор исходных предпосылок, осуществление всех элементов которого достаточно для появления головного события (прохождение сигнала до него). В одном дереве происшествий может быть несколько минимальных сочетаний предпосылок, дающих наиболее существенный вклад в реализацию исследуемого исхода. Например, на рассмотренном дереве происшествий имеется 12 минимальных пропускных сочетаний исходных событий-предпосылок:
ACE, ACF, ACG, ADE, ADF, ADG, BCE, BCF, BCG, BDE, BDF, BDG.
Минимальное отсечное сочетание является дополнением минимального пропускного сочетания, т.к. формулирует условия не возникновения головного события. Это множество включает такой набор событий, который гарантирует отсутствие происшествия, при условии не возникновения ни одного (из составляющих рассматриваемое сочетание) события - предпосылок. На рассмотренном дереве происшествий можно выделить три минимальных отсечных сочетания событий: AB, CD, EFG.
Наиболее известным средством аналитического представления заданного деревом процесса служат структурные функции. Они позволили выразить достоверность появления головного события в зависимости от соответствующих характеристик исходных предпосылок. Для изображения рассмотренного дерева была получена следующая структурная функция:
P(L) = P(A + B).P(C + D).P(E + F + G), (2.12)
где P(*) – вероятности наступления случайных или возможности возникновения уникальных (невоспроизводимых) предпосылок к происшествию.
Количественный анализ аварийности и травматизма с помощью структурных функций осуществлялся в следующей последовательности:
- модель декомпозируется на отдельные блоки;
- в выбранных блоках выделяются подмножества событий, соединенных условиями «И» и «ИЛИ»;
- проводится расчет параметров достоверности наступления вершинных для блоков событий;
- исходное дерево и соответствующая ему структурная функция упрощаются за счет их укрупнения;
- рассчитывается мера возможности возникновения происшествия.
При оценке числовых характеристик исследуемого дерева происшествий мы руководствовались рядом правил и допущений.
1. События дерева, соединенные логическим условием « И», объединяются по принципу их перемножения, при этом считается, что параметр головного события рассчитывается как произведение из n параметров предпосылок (сомножителей):
 , (2.13)
, (2.13)2. События дерева, соединенные логическим условием «ИЛИ», объединяются по принципу логического сложения, а их соответствующие параметры образуют следующую алгебраическую зависимость:
P = 1 – (1 – P1)(1 – P2)…(1 - Pn) = 1 -
 , (2.14)
, (2.14)которая в частных случаях, например, для n = 2 и n = 3, принимает вид:
Pi=2 = P1 + P2 – P1P2,
Pi=3 = P1P3 + P2P3 + P3P1 – P1P2P3
3. Преобразование и упрощение структурных функций осуществляется с соблюдением основных правил булевой алгебры. В соответствии с законом поглощения справедливы, например, следующие равенства:
A· (A · B) = A · B;
A + (A + B) = A.
4. При известных структурных схемах безотказности технических систем и безопасности функционирования они могут быть легко преобразованы в дерево происшествий. При этом их параллельно соединенные элементы соответствуют логическому условию «И», а последовательно соединенные – условию «ИЛИ».
5. Количественный анализ дерева происшествий сложной структуры значительно упрощается за счет использования выявленных на предыдущем этапе минимальных сочетаний событий. Основная идея упрощения сводилась к построению нового, эквивалентного исходному, но более простого дерева, включающего в себя один из двух наборов перечисленных выше сочетаний и одно логическое условие. При анализе методом «деревьев отказов» выявляются комбинации отказов (неполадок) оборудования, ошибок персонала и внешних (техногенных, природных) воздействий, приводящих к основному событию (аварийной ситуации).
Н
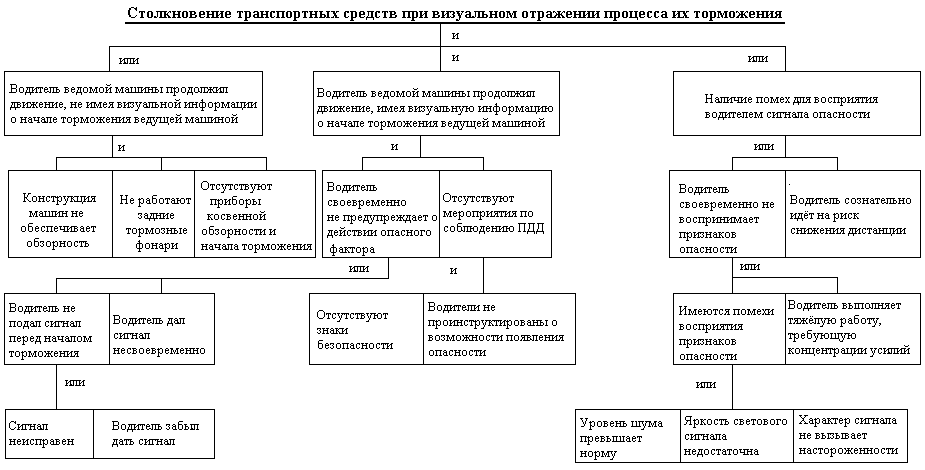
а рис.2.1 приведено дерево причин столкновения транспортных средств при визуальном отражении процесса их торможения.
Рис. 2.1 - Дерево причин столкновения транспортных средств при визуальном
отражении процесса их торможения
Структура «дерева отказа» включает одно головное событие (аварию, инцидент), которое соединяется с набором соответствующих нижестоящих событии, образующих причинные цепи. Для связи между событиями в узлах «деревьев» используются знаки «И» и «ИЛИ».
Анализ «дерева причин столкновения транспортных средств при визуальном отражении процесса их торможения» позволяет выделить ветви прохождения сигнала к головному событию, а также указать связанные с ними требования позволяющие определить основные направления совершенствования указанного процесса.
Для предварительного анализ риска транспортного происшествия в результате причин столкновения транспортных средств при визуальном отражении процесса их торможения, нами предлагается обобщенный подход, базирующийся на представлении меры возможности и меры результата их возникновения в форме лингвистических переменных и соответствующих им балльных оценок или дробных чисел.
В основе предлагаемого универсального подхода лежит энергоэнтропийная концепция, увязывающая природу техногенного риска с термодинамической неуравновешенностью, а его проявление - с приростом энтропии транспортных человеко-машинных систем (ЧМС):
- скачкообразным, в форме аварийного (внезапного и одномоментного) высвобождения большого количества энергии, накопленной транспортными средствами и перевозимыми грузами;
- постепенным, в виде непрерывных энергетических (вибрация, тепло, шум) и материальных (дым, сажа, шлаки) вредных выбросов.
При этом под риском подразумевается интегральная мера опасности, характеризующая и возможность причинения ущерба, и его ожидаемую величину, а под менеджментом риска, осуществляемым с целью поддержания заданной безопасности функционирования рассматриваемых ЧМС, - проведение следующих основных мероприятий:
- идентификацию источников и признаков наиболее вероятного проявления транспортного риска в форме различных происшествий - аварий и несчастных случаев;
- априорную оценку тех показателей данного риска, которые отражают меру возможности или частоту появления подобных происшествий;
- априорную оценку его показателей, характеризующих результат появления каждого такого происшествия, то есть размеры ущерба и длительность времени до их наступления;
- предварительную оценку достаточности имеющихся мер по снижению риска транспортных происшествий и обоснование дополнительных предложений при необходимости;
- прогнозирование и регулирование интегральных показателей транспортного риска с целью принятия решения об его соответствии установленным требованиям.
Естественно, что результативность этих мероприятий будет определяться не только полнотой и способом представления имеющихся исходных данных, но также используемыми при этом показателями риска и методами их априорной и апостериорной оценки. При отсутствии достоверной количественной информации о параметрах ЧМС оценку мер возможности и результата проявления источников транспортного риска предлагается проводить методом экспертных оценок с использованием тех базовых универсальных шкал балльных, лингвистических (словесных) и численных (на отрезке [0,1]) оценок, которые приведены в табл.2.1.
Таблица 2.1 - Экспертные оценки показателей транспортного риска
| Лингвистическая оценка показателей транспортного риска: | Число | ||
| «мера возможности» | «мера результата» | ||
| размеры ущерба | время до проявления | ||
| Совершенно невозможно | Очень, очень низкий | Бесконечно долго | 0,0 |
| Практически невозможно | Очень низкий | Почти бесконечно долго | 0,1 |
| Допустимо, но маловероятно | Низкий | Исключительно медленно | 0,2 |
| Отдаленно возможно | Ниже среднего | Очень медленно | 0,3 |
| Необычно, но возможно | Средний | Медленно | 0,4 |
| Неопределенно возможно | Выше среднего | Неопределенно быстро | 0,5 |
| Практически возможно | Серьезный | Быстро | 0,6 |
| Вполне возможно | Очень серьезный | Очень быстро | 0,7 |
| Наиболее возможно | Высокий | Исключительно быстро | 0,8 |
| Достоверно возможно | Очень высокий | Почти мгновенно | 0,9 |
| Абсолютно достоверно | Очень, очень высокий | Практически мгновенно | 1,0 |
Для облегчения восприятия показателей транспортного риска, оцененных с помощью предложенной выше универсальной таблицы, каждой ее строке должны соответствовать конкретные значения мер возможности (частоты) [1/год], ущерба [рублей] и времени [часов], величина которых должна подбираться с учетом специфики конкретного вида транспорта.
В третьей главе «Разработка устройства по фиксированию момента начала торможения транспортного средства» разработано новое устройство и показано структурное взаимодействие различных его элементов, произведён расчёт датчика движения устройства, разработана принципиальная электрическая схема устройства, произведена проверка и доработка основных функций датчика углового перемещения и устройства.
С
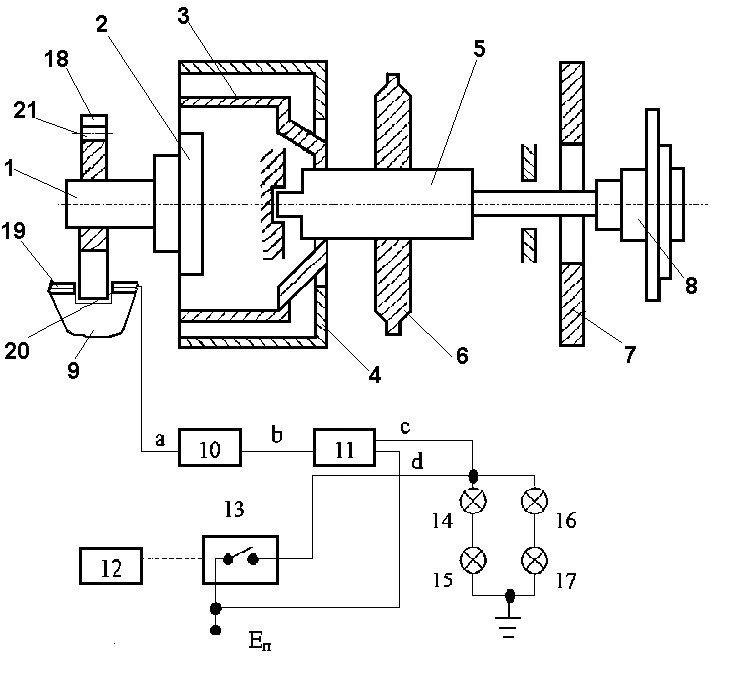
учетом проведённого анализа существующих систем и устройств по определению отрицательного ускорения было разработано усовершенствованное устройство, которое может быть использовано для формирования сигналов всех видов торможения транспортных средств. Схема такого устройства показана на рис.3.1.
Рис. 3.1 - Устройство сигнализации торможения
В устройстве использован принцип частотно-импульсного определения отрицательного ускорения. Оно обеспечивает: слежение за скоростью вращения магнитоиндукционного спидометра транспортного средства с помощью фотодатчика; определение ускорения транспортного средства путём частотно-импульсного преобразования скорости; определение момента появления отрицательного ускорения; фильтрацию двойных сигналов отрицательного ускорения; запоминание периода торможения; формирование и индикацию прерывистых сигналов в течение периода торможения.
Диапазон скорости вращения тросика спидометра от 5 до 25 Гц. Частота прерывания сигналов индикации 2 Гц. Напряжение питания от 9 до 12 В.
Н
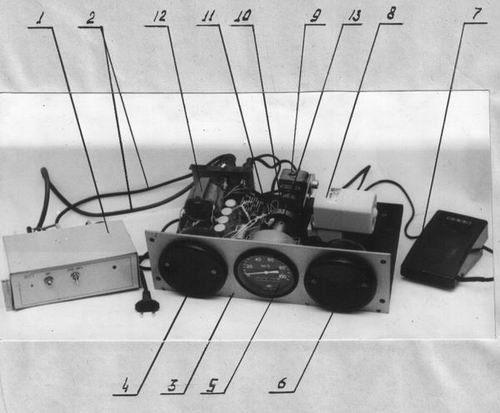
а основании разработанных чертежей были изготовлены опытные образцы: а) датчика углового перемещения и б) устройства (УСТТ). Для доработки их до совершенства был разработан испытательный стенд. Эти образцы были установлены на стенде. Схема испытательного стенда с УСТТ и датчиком углового перемещения представлена на рис. 3.2.
Рис.3.2 - Общий вид испытательного стенда:
1- УСТТ; 2- цепи питания и связь с датчиком; 3 - стенд; 4, 6 - стоп-сигналы; 5 - спидометр; 7 - площадка управления двигателем; 8- электродвигатель; 9 - редуктор;10 фотоэлектрческий датчик, укрепленный между тросиком спидометра и редуктором; 11 - чувствительный элемент датчика; 12 - источник питания;
Стенд моделирует процессы, максимально приближенные к действительным, так как автомобильный спидометр 5 через тросик и редуктор 9 связан с двигателем 8, причем вращение тросика передается диску фотоэлектрического преобразователя 10, чувствительный элемент которого 11 формирует электрические импульсы и посылает их на УСТТ. Диск датчика имеет одно отверстие, поэтому в УСТТ будет поступать за каждый оборот тросика один импульс. Изменение скорости электродвигателя 8 осуществляется оператором с помощью подпружиненной площадки 7 (при большем нажатии – большая скорость, при отжатии происходит снижение скорости, т.е. имитируется торможение двигателем. На этом стенде проводились лабораторные испытания основных функций датчика углового перемещения и УСТТ в динамике, т.е. получение сигнала отрицательного ускорения при различных скоростях торможения. Далее, для получения реального результата в производственных условиях, отлаженный на стенде датчик углового перемещения и УСТТ были установлены на автомобиле рис.3.3.
Р
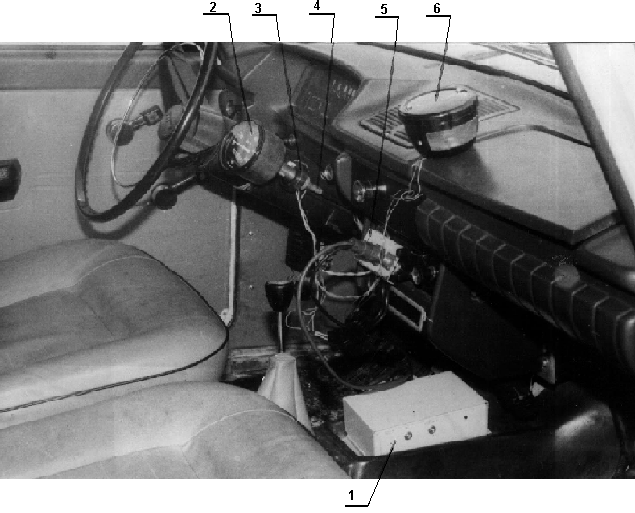
ис.3.3 - Подключение датчика углового перемещения и УСТТ к автомобилю:
1 – УСТТ; 2 - спидометр; 3 - фотоэлектрический датчик углового перемещения; 4 - тросик спидометра; 5 - разъем для подключения питания; 6 - визуальный регистратор сигнала
Для проведения испытаний УСТТ 1 подключался к автомобилю через фотоэлектрический датчик 3, причем датчик подключается как промежуточное звено между спидометром 2 и тросиком спидометра 4 в салоне автомобиля. Для проверки основных функций УСТТ включали переключатели Ппит. и Псс. Наращивая скорость, а затем сбавляя скорость автомобиля фиксировали через визуальный регистр сигнала 6 мигание стоп-сигналов и звуковых сигналов.
Результаты стендовых и производственных испытаний показали, что датчик углового перемещения и УСТТ соответствуют своему функциональному назначению.
В четвёртой главе «Экспериментальные исследования процесса торможения с различными системами визуального отражения» даётся оценка достаточности мер по снижению возможности проявления риска столкновения транспортных средств; приведены результаты экспериментальных исследований.
В нашем случае определение риска столкновения транспортных средств при визуальном отражении процесса их торможения (R), оценивалось экспертами при штатном устройстве сигнализации процесса торможения и новом устройстве, на основе числовых значений критериев изложенных в табл.4.1. по формуле:
R = Mw · Mr , (4.1)
где Mw - «мера возможности»;
Mr - «мера результата» Mr = U ·T,
здесь U - размеры ущерба, Т – время до проявления события.
Для экспертов, на основе дерева причин (рис. 2.1), был разработан специальный опросник, содержащий краткие формулировки 10 функциональных качеств устройств, которым соответствует их применение для визуального отражении процесса торможения транспортных средств при различных условиях эксплуатации с целью предотвращения их столкновения при движении друг за другом.
Рекомендуемое число экспертов может быть определено по формуле:
 (4.2)
(4.2)где Е - ошибка результата прогнозирования (0 < Е < 1).
При подстановке предельных значений Е минимальное количество экспертов равно 4. В целях получения достоверных данных и оптимальности затрат нами было принято число экспертов равное 10.
Результаты экспертной оценки транспортного риска по функциональным показателям качества устройств, с использованием лингвистических и численных оценок (табл.2.1) приведены в табл.4.1, в таблице 4.2 показаны результаты статистической обработки.
Таблица 4.1. - Результаты экспертной оценки транспортного риска
| Наименование показателя | новое устройство | штатная система | ||||||
| Mw | U | Т | R | Mw | U | Т | R | |
| 0,6 | 0,2 | 0,4 | 0,048 | 0,6 | 0,2 | 0,4 | 0,048 |
| 0,7 | 0,4 | 0,5 | 0,14 | 0,7 | 0,4 | 0,5 | 0,14 |
| 0,4 | 0,4 | 0,5 | 0.08 | 0,4 | 0,4 | 0,5 | 0,08 |
| 0,1 | 0,2 | 0,2 | 0,004 | 0,6 | 0,4 | 0,6 | 0,144 |
| 0,2 | 0,2 | 0,4 | 0,016 | 0,1 | 0,2 | 0,2 | 0,004 |
| 0,1 | 0,2 | 0,3 | 0,006 | 0,7 | 0,6 | 0,3 | 0,126 |
| 0,1 | 0,1 | 0,1 | 0,001 | 0,9 | 0,6 | 0,6 | 0,324 |
| 0,3 | 0,1 | 0,3 | 0,009 | 0,3 | 0,4 | 0,4 | 0,048 |
| 0,5 | 0,4 | 0,4 | 0,08 | 0,4 | 0,4 | 0,4 | 0,064 |
| 9.Затраты на установку | 0,5 | 0,4 | 0,4 | 0,08 | 0,2 | 0,2 | 0,4 | 0,016 |
Таблица 4.2 - Результаты статистической обработки экспертных оценок
| Показатель | новое устройство | штатная система |
| Среднее | 0,0464 | 0,0994 |
| Стандартная ошибка | 0,014894 | 0,029394 |
| Медиана | 0,032 | 0,072 |
| Мода | 0,08 | 0,048 |
| Стандартное отклонение | 0,047098 | 0,092952 |
| Дисперсия выборки | 0,002218 | 0,00864 |
| Эксцесс | -0,19071 | 3,551065 |
| Асимметричность | 0,821127 | 1,68319 |
| Интервал | 0,139 | 0,32 |
| Минимум | 0,001 | 0,004 |
| Максимум | 0,14 | 0,324 |
| Сумма | 0,464 | 0,994 |
| Счет | 10 | 10 |
| Наибольший(1) | 0,14 | 0,324 |
| Наименьший(1) | 0,001 | 0,004 |
| Уровень надежности(95,0%) | 0,033692 | 0,066494 |
Анализ данных таблицы показывает преимущество нового разработанного нами устройства, так суммарный показатель риска столкновения транспортных средств при визуальном отражении процесса их торможения (R), нового устройства более чем в два раза ниже штатной системы.
Экспериментальные исследования разработанного устройства проводились в два этапа.
На первом этапе проводилось определение времени задержки включения системы визуального отражения процесса торможения штатной системой – стоп-сигналами в сравнении с устройством. Автомобиль марки ЗИЛ-130 наряду с существующей системой визуального отражения процесса торможения (стоп-сигналы) оснащалась разработанным устройством. На передней части капота автомобиля устанавливался сигнал-указатель красного цвета, включаемый руководителем экспериментальных исследований. Одновременно контакты сигнала-указателя с помощью соединительных проводов подключались к входу таймера, который работал в режиме включения одновременно по двум каналам. В качестве таймера использовался частотомер типа Ч3-34, установленный на автомобиле. Второй вход частотомера, работающий в режиме выключения, соединялся с контактами включения тормозного фонаря нового устройства, а третий соединялся с контактами включения стоп-сигналов автомобиля. Исследования проводились при скоростях движений 20; 40; 60 км/ч.
При проведении исследований автомобиль начинал движение, достигнув определенной скорости, руководитель экспериментальных исследований включал сигнал-указатель (при этом включался таймер), что являлось сигналом для водителя автомобиля о начале торможения, процесс которого он и начинал выполнять. Водитель переносил ногу с педали акселератора на педаль тормоза, в этот момент уже начинался процесс замедления движения автомобиля, который фиксировало новое устройство, и включались дополнительный тормозной фонарь, и выключался канал таймера. При использовании штатной системы визуального отражения процесса торможения, при нажатии водителем педали тормоза ведущего автомобиля включались стоп-сигналы, и выключался второй канал таймера.
Н
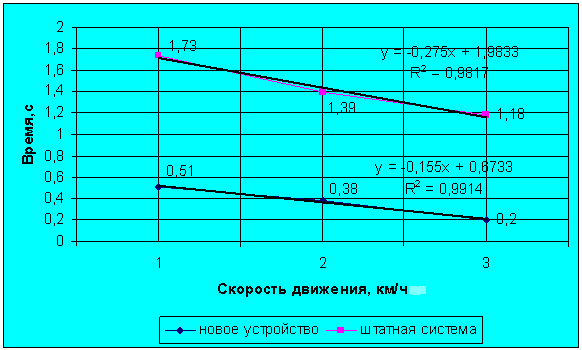
а рис.4.1 показано изменение времени срабатывания систем индикации торможении при различных скоростях движения автомобиля. Как показывают результаты исследования время срабатывания системы индикации торможении нового устройства в 3 раза меньше чем у штатной системы, причем этот разрыв увеличивается при повышении скорости движения автомобиля. На наш взгляд, это связано с запаздыванием реакции водителя при процессе торможения, в сравнении с функционированием новой системы, которая не зависит от водителя.
Рис.4.1 - Изменение времени срабатывания систем индикации торможении
при различных скоростях движения автомобиля
Второй этап экспериментальных исследований проходил при групповом вождении автомобилей. В нем принимали участие два автомобиля марки ЗИЛ-130, в связке ведущий и ведомый, управляемые водителями-инструкторами, имеющими стаж работы – 10 и 12 лет.
Один из автомобилей – ведущий наряду с существующей системой визуального отражения процесса торможения (стоп-сигналы) оснащался разработанным устройством. Специальный переключатель позволял в требуемый момент подключать указанное устройство.
На передней части капота ведущего автомобиля устанавливался сигнал-указатель красного цвета, включаемый руководителем экспериментальных исследований. Одновременно контакты сигнала-указателя с помощью соединительных проводов подключались к входу таймера, который работал в режиме включения. Второй вход таймера, работающий в режиме выключения, соединялся с контактами включения тормозного фонаря ведомого автомобиля. С целью исключения порыва проводов, они располагались внутри соединительного буксировочного троса длинной 20 метров.
При проведении исследований автомобили начинали движение в связке, достигнув определенной скорости, руководитель экспериментальных исследований включал сигнал-указатель (при этом включался таймер), что являлось сигналом для водителя ведущего автомобиля о начале торможения, процесс которого он и начинал выполнять.
В первом случае, при использовании штатной системы визуального отражения процесса торможения, при нажатии водителем педали тормоза ведущего автомобиля включались стоп-сигналы и таймер.
Во втором случае, при использовании разработанного устройства, водитель ведущей машины, получив сигнал о начале торможения, переносил ногу с педали акселератора на педаль тормоза, в этот момент уже начинался процесс замедления движения автомобиля и включались стоп-сигналы и таймер.
Водитель ведомого автомобиля, увидев включенный стоп-сигнал ведущего автомобиля, нажимал на тормоз, при этом соответственно включался стоп-сигнал и отключался таймер.
Р
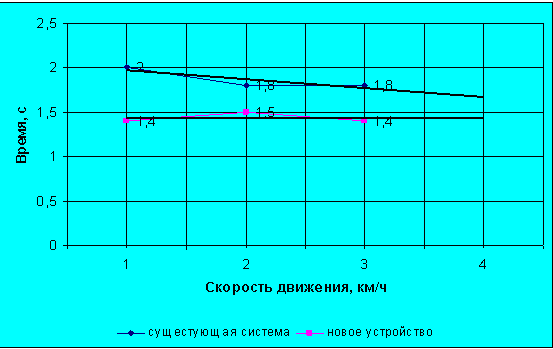
езультаты исследований процесса торможения с различными системами визуального отражения показаны на рис.4.2. Анализ этого графика показывает, что интегральный показатель времени срабатывания индикации торможении при использовании УСТТ меньше в среднем на 0,5+0,1 с, чем при использовании существующей системы. В то же время достоверного изменения указанного показателя от скорости движения автомобиля не установлено.
Рис.4.2 - Изменение интегрального показателя времени срабатывания индикации
торможении при различных скоростях движения автомобиля
Следует заметить, что при различных скоростях движения транспортных средств и различных показателях времени срабатывания индикации торможения, транспортное средство проходит дополнительное расстояние, которое очень важно, иногда не хватает нескольких сантиметров для предупреждения столкновений.
В табл.4.3 приведено дополнительное расстояние при торможении в зависимости от скорости движения автомобиля и времени срабатывания индикации торможения.
Таблица 4.3 - Пройденный путь автомобиля при различных скоростях и показателях времени срабатывания индикации торможения
| Скорость движения, км/ч | Дополнительное расстояние при торможении (м) при различных показателях времени срабатывания индикации торможения (с) | |||
| 0,5 | 1,0 | 1,2 | 1,5 | |
| 20 | 2,75 | 5,5 | 6,6 | 8,25 |
| 40 | 5,5 | 11,0 | 13,2 | 16,5 |
| 60 | 8,3 | 16,6 | 19,92 | 24,9 |
Н
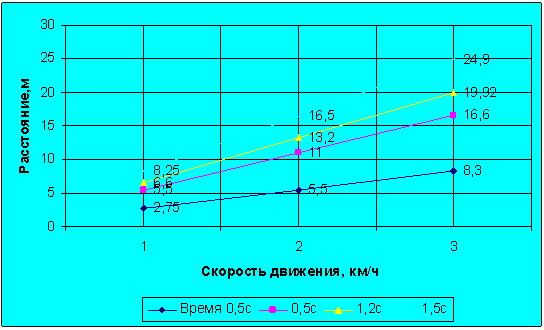
а рис.4.3 показано изменение дополнительного расстояния при торможении в зависимости от скорости движения автомашины и времени срабатывания индикации торможения.
Рис.4.3 - Изменение дополнительного расстояния при торможении в зависимости
от скорости движения автомашины и времени срабатывания индикации торможения
В целом, результаты экспериментальных исследований, еще раз подтвердили эффективность разработанного нами устройства.
В пятой главе «Разработка и внедрение учебного стенда для исследования параметров сигнализации торможения» представлен разработанный учебный стенд сигнализации торможения, дано описание алгоритма программы микроконтроллера стенда, приведён алгоритм программы стенда.
Стенд предназначен для изучения предупреждения столкновения транспортных средств, движущихся в попутном направлении и для исследования параметров сигнализации торможения.
О

бщий вид учебного стенда приведен на рисунке 5.1.
Рис.5.1 - Общий вид учебного стенда сигнализации торможения
Структурно стенд (базовый вариант) включает персональный компьютер и контроллер. В полный комплект стенда дополнительно входят осциллограф и частотомер.
Конструктивно стенд представляет собой структуру из 2-х блоков: компьютер с запущенной программой имитации движения транспортного средства (ТС) и блок микроконтроллера с элементами индикации. Блоки соединены между собой гибким кабелем.
Передняя панель блока микроконтроллера содержит следующие элементы индикации:
– отображение скорости движения ТС, км/ч;
– отображение пройденного тормозного пути ТС с момента начала последнего торможения, м;
– индикаторы процесса торможения;
– индикатор питания блока, вкл/выкл.
В шестой главе «Оценка экономической эффективности результатов исследования» излагается экономическая эффективность от внедрения устройства сигнализации торможения транспортного средства, которая составила 1 304 320 руб. на 10 тыс. транспортных средств.
Общие выводы
1. Анализ используемых транспортных средств и автомобильных дорог позволил выявить, что основную часть сельскохозяйственных грузов (выращенный урожай, продукцию животноводства и растениеводства, топливо – смазочные и строительные материалы, удобрения, семена, рабочих и другие различные грузы) перевозят в АПК автомобильным (до 80 %) и тракторным ( 20…27% ) транспортом по дорогам общегосударственного значения I – II категории, республиканского и областного значения III категории и местного значения IY – Y категории.
2. Анализ многолетних данных и динамики основных показателей аварийности показал, что уровень транспортного травматизма в стране остается крайне высоким и находится в пределах 32…35 тыс. аварий со смертельным исходом в год. Наблюдался рост количества ТП в расчете на 10 тыс. единиц транспортных средств (54,4). Столкновения транспортных средств составили четвертую часть (27,0 %) всех ТП, причем основная их доля – 55,6 % приходится на лобовые, фронтальные или задние удары.
3. Разработано «дерево причин» столкновения транспортных средств при визуальном отражении процесса их торможения, которое позволило установить логико-вероятностную взаимосвязь между отдельными случайными исходными событиями в виде первичных и результирующих отказов, совокупность которых приводит к главному анализируемому событию – транспортной аварии и определить основные направления совершенствования указанного процесса.
Для выявления причинно-следственных связей между этими событиями нами использован логико-графический метод анализа возникновения опасностей столкновения транспортных средств.
4. Разработан и изготовлен опытный образец усовершенствованного устройства определения отрицательного ускорения, который может быть использован для формирования сигналов всех видов торможения транспортных средств. В устройстве использован принцип частотно-импульсного определения отрицательного ускорения.
5. Результаты экспертной оценки транспортного риска по функциональным показателям качества устройств визуального отражения процесса торможения, с использованием метода экспертных оценок на основе базовых универсальных шкал балльных, лингвистических (словесных) и численных (на отрезке [0,1]) оценок показали преимущество нового разработанного нами устройства. Суммарный показатель риска столкновения транспортных средств при визуальном отражении процесса их торможения (R), нового устройства более чем в два раза ниже штатной системы (соответственно 0,0464 и 0,0994)
Результаты экспериментальных исследований показали, что время срабатывания системы индикации торможения нового устройства в 3 раза меньше чем у штатной системы, причем этот разрыв увеличивается при повышении скорости движения автомобиля. Интегральный показатель времени срабатывания индикации торможении при использовании УСТТ меньше в среднем на 0,5+0,1 с, чем при использовании существующей системы. В то же время достоверного изменения указанного показателя от скорости движения автомобиля не установлено. Дополнительное расстояние при торможении при скорости движения автомашины 60 км/час и времени срабатывания индикации торможения 0,5с составляет 8,3м.
6. Разработан учебный стенд сигнализации торможения транспортного средства, который предназначен для изучения предупреждения столкновения транспортных средств, движущихся в попутном направлении и для исследования параметров сигнализации торможения при подготовке водителей транспортных средств.
7. Ожидаемая экономическая эффективность результатов исследования от внедрения нового устройства сигнализации торможения на 10 тыс. транспортных средств составит 1 304 320 руб.
Основные положения диссертации опубликованы в следующих работах
1. Копылов С.А. Повышение безопасности водителей транспортных средств [Текст] / Копылов С.А., Загородних А.Н. // Механизация и электрификация сельского хозяйства, №7, 2008, С.50-51.
2. Копылов С.А. Анализ методов оценки аварийности, травматизма и безопасности труда водителей транспортных средств в сельском хозяйстве [Текст] / Загородних А.Н., Копылов С.А. // Охрана труда и техника безопасности в сельском хозяйстве. -2009. - № 1. - С.42-53.
3. Копылов С.А. Анализ аварийности на автомобильных дорогах [Текст] / Загородних А.Н., Копылов С.А. // Охрана труда и техника безопасности в сельском хозяйстве. – 2009. - №3. - С.46-51.
4. Копылов С.А. Обеспечение безопасной перевозки сельхозгрузов на транспортных средствах в агропромышленном комплексе [Текст] / Копылов С.А., Загородних А.Н. // Охрана труда и техника безопасности в сельском хозяйстве. – 2009. - № 8 .- С.27-32.
5. Копылов С.А. Обеспечение перевозки пестицидов на транспортных средствах в агропромышленном комплексе [Текст] / Копылов С.А., Загородних А.Н., Баранов Ю.Н. // Сборник материалов Всероссийской научно-практической конференции «Требования безопасности к пестицидам и агрохимикатам». – 2009. – Орёл: ФГОУ ВПО Орёл ГАУ. – С. 157-163.
6. Копылов С.А. Анализ факторов, определяющих производственный травматизм на транспортных средствах [Текст] / Загородних А.Н., Копылов С.А. // Охрана труда и техника безопасности в сельском хозяйстве. -2009. - № 9 . – С.43-50.
7. Копылов С.А. Оценка риска транспортного происшествия в результате причин столкновения транспортных средств при визуальном отражении в процессах торможения [Текст] / Копылов С.А., Загородних А.Н., Баранов Ю.Н. // Сборник материалов Всероссийской научно-практической конференции «Концепция безопасности жизнедеятельности в агропромышленном комплексе»». – 2009. – Орёл: ФГОУ ВПО Орёл ГАУ. – С.159-163.
8. Копылов С.А. Экспериментальные исследования процесса торможения с различными системами визуального торможения [Текст] / Копылов С.А., Загородних А.Н. // Охрана труда и техника безопасности в сельском хозяйстве. – 2009. - №10 .- С.32-36.
9. Копылов С.А. Логико-графический анализ возникновения опасностей столкновения транспортных средств при визуальном отражении процесса их торможения [Текст] / Копылов С.А., Загородних А.Н. // Вестник Орёл ГАУ Теоретический и научно практический журнал. – 2011.- №2.- С.10-15.
10. Копылов С.А. Оценка достаточности мер по снижению возможности проявления риска столкновения транспортных средств при визуальном отражении процесса их торможения [Текст] / Копылов С.А., Загородних А.Н. // Ученые записки Орловского государственного университета. Серия: естественные, технические и медицинские науки; раздел «Сельское хозяйство». – 2011.- №3 (41). – С.280-286.
Подписано к печати « »____________2011 г.
Формат 64х84/ 16, объём 1,0 уч.-изд.л
Заказ № 42 Тираж 100 экз.