
Отработка модели электродвигателя dc motor
| Вид материала | Документы |
- Некоторые смазочные материалы huskey™ и slipkote, 150.24kb.
- Урок «Решение задач оптимизации с помощью табличного процессора Excel», 59.97kb.
- Урок «Решение задач оптимизации с помощью табличного процессора Excel», 65.29kb.
- Организационные технические мероприятия, 790.48kb.
- Переход на новый базисный учебный план параллели 5 -Х классов. Отработка на базе школы, 1093.59kb.
- Основные электроаппараты электрической схемы лифта, 165.56kb.
- Самостоятельная работа 87 130 Всего часов на дисциплину, 58.84kb.
- Ford Motor Company Импульсные процессы в механике сплошных сред IX международная научная, 154.21kb.
- Аудит общественного здания образец аудита, 1221.73kb.
- Тема 41. Предпосылки модели экономики с экзогенными ценами (кейнсианская модель равновесия, 96.08kb.
Отработка модели электродвигателя DC Motor
В библиотеке компонентов EWB Miscellaneous (разнообразные) содержится модель электродвигателя постоянного тока DC motor, содержащая обмотку возбуждения или статор (field), обмотку якоря или ротора (armature) и вывод, имитирующий выходной вал, с которого снимается сигнал Uo. Показания вольтметра Uo в вольтах соответствуют скорости вращения (об/мин) (см. HELP на DC Motor).
 |  |
Рис 1. Графическое изображение электродвигателя.
Направление вращения можно изменять, переключая направление тока статора и ротора. Скорость вращения можно регулировать, изменяя величину тока через обмотки двигателя. Схема включения двигателя, приведенная в HELP для компонента DC Motor, показана ниже.

Рис 2. Схема включения двигателя из статьи HELP
Соберем рекомендованную схему управления двигателем на основе имеющейся в библиотеке единственной модели двигателя DC Motor “Ideal”.
. Схема управления направлением вращения
Для изменения направления вращения двигателя необходимо переключать направление тока в одной из обмоток двигателя. Обычно это реализуется с помощью мостовой схемы, показанной на рис 3.
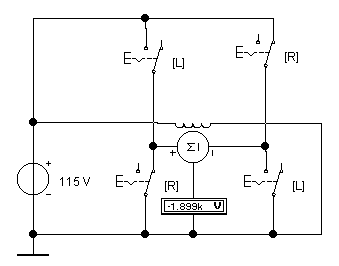
Рис 3. Схема управления направлением вращения двигателя
При одновременном замыкании пары ключей L или пары R меняется направление вращение от -1899 об/мин до +1899 об/мин. Режим быстрого торможения реализуется в случае, когда одновременно замкнуты либо оба верхних, либо оба нижних ключа.
Недопустимо, чтобы были одновременно замкнуты ключи L и R противоположных плеч моста..
Схема управления скоростью вращения
Простейший способ регулировки скорости вращения можно реализовать за счет изменения напряжения (тока) на обмотках. Для этого соберем схему для исследования, показанную ниже.

Рис 4. Схема регулировки скорости вращения за счет изменения напряжения на обмотках.
Возможны следующие способы регулировки скорости вращения за счет изменения напряжения источника;
V1=var, V2=const, V1= const, V2= var, либо на обоих обмотках вместе, подключая обе обмотки к одному источнику (например, V1).
В программной среде EWB для комплексного исследования влияния какого либо параметра на режим схемы предусмотрена возможность моделирования с вариацией этого параметра (команда Analysis/Parameter Sweep). Для отображения на схеме нумерации выводов (nodes) и идентификаторов компонент (reference ID) следует в команде Circuit/Schematic Options, отметить галочками соответствующие действия.
 а) |  б) |  в) |
Рис 5. Зависимость скорости вращения от напряжения питания а – статорной обмотки, б – роторной обмотки, в – одновременное изменение питания обоих обмоток.
Из сопоставления графиков видно, что линейный закон регулирования получается в том случае, когда напряжение на статорной обмотке удерживается неизменным (номинальным), а на роторной обмотке изменяется в широких пределах.
Вывод: для регулировки скорости вращения двигателя необходимо изменять напряжение (ток) в роторной обмотке при номинальном питании статорной обмотки.
ШИМ-регулирование скорости вращения
Регулировка скорости током или напряжением на обмотке энергетически невыгодна, так как значительная часть мощности выделяется в регуляторе, что снижает КПД устройства, возникают проблемы с теплоотводом от регулятора. Этих недостатков лишен импульсный способ управления мощностью с помощью широтно-импульсной модуляции.
Для моделирования ШИМ-регулирования скорости вращения двигателя соберем схему рис 6.

Рис 6. Схема для исследования ШИМ-регулирования скорости вращения.
Статор питается от источника V1 постоянного тока, а ротор – от импульсного источника, содержащегося в библиотеке Source EWB. В меню Clock / Clock Properties устанавливаем амплитуду 115 В, частоту 100 Гц и 200Гц в соответствующих экспериментах. Задаем режим моделирования Analysis/Parameter Sweep, открывается окно параметров, показанное на рис 7. В этом окне задаём варьируемый параметр и проводим анализ. Результаты моделирования выводятся в виде соответствующих графиков, например, в виде зависимости времени разгона и торможения двигателя от момента трения Shaft Friction.
 |  |
Рис 7. Зависимость времени разгона и торможения двигателя от момента трения Shaft Friction (Nms/rad):
1 - BR=0.001; 2 - BR=0.01; 3 - BR=0.1.
В окне выбираем компонент, свойства которого исследуются (двигатель MG1), в окне Parameter, щелкнув слайдер справа, выбираем из перечня параметров Shaft Friction. Величину Start value выбираем на порядок меньше номинальной (модель DC Motor “Ideal”), а величину End value – на порядок больше номинальной. В окошке Sweep Type устанавливаем логарифмический характер свипирования – Decade. Режим анализа - Transient Analysis. Кнопкой Set transient options устанавливаем время анализа от 0 до 5 с достаточное, чтобы наблюдать переходные процессы при разгоне и торможении. Результат моделирования представлены на рис. 7 в виде семейства характеристик для разных значений параметра Shaft Friction. Время разгона практически не зависит от параметра Shaft Friction. Номинальная скорость вращения снижается при увеличении момента трения. Время торможения сильно зависит от момента трения.
Аналогично исследуем влияние момента инерции Machine rotational inertia на время разгона и торможения. Параметры и результат моделирования показаны на рис 8.
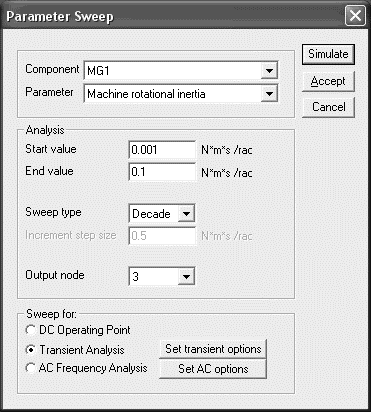 |  |
Рис 8. Зависимость времени разгона и торможения двигателя от момента инерции Machine rotational inertia (Nms/rad):
- J=0.001; 2- J=0.01; 3 – J=0.1.
С увеличением момента инерции увеличивается время разгона и торможения двигателя. Скорость вращения в установившемся режиме от момента инерции не зависит.
На рис 9 представлены результаты моделирования динамических характеристик двигателя при вариации параметра номинальной скорости вращения Rated Rotational Speed.
Время разгона и торможения практически не зависит от этого параметра, но в соответствии с параметром изменяется скорость вращения двигателя в установившемся режиме.
 |  |
Рис 9. Зависимость времени разгона и торможения двигателя от номинальной скорости вращения Rated Rotational Speed (NN):
1- NN=500 об/мин; 2- NN=1000 об/мин; 3- NN=1500 об/мин; 4- NN=2000 об/мин.
Подобные исследования с варьированием остальных ниже перечисленных параметров в указанных диапазонах величин практически не влияли на динамические характеристики двигателя:
Сопротивление обмотки якоря - от 0.5 до 1.5 Ом;
Индуктивность якоря - от 0.0001 до 0.01 Гн;
Сопротивление обмотки возбуждения – от 50 до 150 Ом;
Индуктивность обмотки возбуждения - от 0.0001 до 0.01 Гн;
Разработка модели двигателя в соответствии с параметрами задания
В пакете EWB имеется возможность пополнять библиотеку компонент своими моделями. Воспользуемся этим для создания математической модели двигателя в соответствии конкретными параметрами, заданными в ТЗ. Для этого в меню DC Motor Properties, выделив модель DC Motor “Ideal”, копируем параметры идеальной модели, нажав кнопку Copy. Создадим свою библиотеку (например, “My”), нажав кнопку New Library. Откроем созданную библиотеку “My” и копируем в папку параметры модели “Ideal”, щелкнув кнопку Paste. В открывшемся окне переименуем созданную модель (например, 24В,1А). Щелкнув кнопку “Edit”, отредактируем параметры модели в соответствии с ТЗ – напряжение, ток и скорость вращения. Остальные параметры оставим без изменения. Соберем схему для исследования динамических характеристик с новой моделью двигателя и источником питания 24 В. Результат моделирования в режиме Analysis/Transient показаны на рис 10а.
 а) |  б) |
Рис 10. Динамические характеристики двигателя DC Motor “24V,1A”. а – характеристики промежуточной модели двигателя с неоптимизированной нагрузкой; б) характеристики модели двигателя “24V,1A” с оптимизированной нагрузкой.
Характеристики рис 10а соответствуют промежуточной модели, когда отредактированы только электрические параметры модели – ток, напряжение, остальные параметры оставлены без изменения, что и у модели “Ideal”. Очевидно, что у характеристики слишком большое время разгона. Фактически отсутствует участок номинальной скорости; двигатель за две секунды не успевает разогнаться до номинальных оборотов. Время торможение приблизительно в норме. Такой результат возможен, если слишком большой момент инерции. Момент трения можно не корректировать. После коррекции модели двигателя (уменьшение момента инерции) динамическая характеристика приблизительно соответствует динамической характеристике модели “Ideal” и показана на рис 10б.
Разработка схемы управления
Функционально узлы управления исполнительными механизмами и устройствами состоят из силового элемента и схемы его управления. Ключ обычно включается последовательно с нагрузкой (рис 11), которая может одним выводом подключаться к земле или источнику питания. Соответственно, если ключ имеет общую точку с землей, то называется нижний ключ (рис 11б), а если общая точка с источником питания – верхний ключ (рис 11а). Управление ключом осуществляется логическим сигналами относительно земли, поэтому схемотехника верхнего или нижнего ключей различная.

Рис 2.11. Виды ключей: а) верхний, б) нижний, в) мостовая схема управления электродвигателем
Часто используется комбинация верхних и нижних ключей – полумостовая ключевая схема. Две полумостовых схемы образуют мостовую схему (рис 11в), используемую в случае, если надо менять направление тока в нагрузке. Режим быстрого торможения реализуется в случае, когда одновременно замкнуты либо оба верхних, либо оба нижних ключа.
Нижний ключ
В качестве простейшего ключа для коммутации нагрузки, подключенной к положительной шине питания, может быть использован биполярный n-р-n транзистор или МОП-транзистор с n-каналом.
Специфические требования к нагрузке источника управляющего сигнала (малое входное сопротивление биполярных транзисторов и сравнительно большое напряжение затвор-исток, необходимое для полного включения МОП-транзисторов), как правило, диктуют необходимость использования дополнительных элементов для согласования входных сигналов.
 а) |  б) |
Рис 12. Схемотехника нижних ключей: а) маломощный; б) мощный.
На рис 12 приведены схемы нижних ключей на биполярных транзисторах для коммутации относительно невысоких токов нагрузки (менее 0.1-0.5 А) и сильноточный ключ. Напряжение питания может быть любым и определяется предельными параметрами выходного транзистора. Резистор RБ выбирается из условия насыщения транзистора (Iб Iбн).
Пороговое напряжение Uпорог срабатывания ключа должно быть согласовано с пороговым напряжением входных логических сигналов и обусловлено коэффициентом деления резистивного делителя Rб и R1
 ;
; для ТТЛ - Uпорог~1,4 В, при Е12,4 В,
для КМОП - при Е1=Еп =5 В Uпорог~2,5 В.
Диоды VD1-2 защищают вход и выход ключа от выбросов напряжения отрицательной полярности при индуктивной нагрузке или при работе на шину. Если нагрузка резистивная, диоды можно не ставить.
Таблица 1. Расчетные соотношения для ключевой схемы (рис 12а).
| Выбор параметров источника питания |  , ,  Uкэ_нас~0.2-0.4 В |
| Выбор транзистора: должен удовлетворять условиям |  , ,  , ,  |
| Rб находится из условия | Uн/Iн > Rб > Rвых ЛЭ 100 Ом |
| R1 (находится из выражения 1.8) Uпорог~1,4 В, Е12,4 В). |  |
| Диод VD2 должен удовлетворять | Iд допIн, Uд допЕп |
| Диод VD1 –любой маломощный | Iд доп1020 мА, Uд доп5 В |
Для увеличения нагрузочной способности ключа (Рис 12б) используется эмиттерный повторитель, выход которого нагружен на переход база-эмиттер ключевого транзистора, а вход через резистивный делитель сопрягается с ТТЛ- и/или КМОП-логикой.
Таблица 2 Расчетные соотношения для ключевой схемы (Рис 12б).
| Выбор параметров источника питания |  , , Uкэ нас~0.7-1.0 В |
| Выбор транзистора VT1: должен удовлетворять условиям |  , ,  , ,  |
| Транзистор VT2 маломощный: должен удовлетворять условиям |  , ,  , , |
| Rб находится из условия | 12Uн/Iн > Rб > Rвых ЛЭ 100 Ом |
| R1 (находится из выражения 1.8) Uпорог~1,4 В, Е12,4 В). | |
| R2 | R20.1R1 |
| Диоды VD2,3 выбираются из условий | Iд допIн, Uд допЕп |
| Диод VD1 –любой маломощный | Iд доп1020 мА, Uд доп5 В |
Более развитые схемы управления нижними ключами иногда включают в себя логические элементы (И, ИЛИ, И-НЕ, ИЛИ-НЕ) и дополнительные входы разрешения/запрещения работы. Питание схем управления в интегральном исполнении осуществляется либо от дополнительного внешнего источника, либо через встроенный стабилизатор от источника коммутируемого напряжения. Пунктиром в схемах ключей показаны элементы, часто реализуемые в виде ИС.
Верхний ключ
Простейшее решение для коммутации заземленной нагрузки при питании положительной полярности — применение n-р-n транзистора в виде эмиттерного повторителя (Рис 13а).
 а) |  б) |
Рис 13. Схемотехника верхнего ключа на биполярных транзисторах
При запертом транзисторе VT2, выходной ток течет через транзистор эмиттерного повторителя VT1. В схеме рис 13а резистор R2 задает ток базы, чтобы обеспечить насыщенный режим транзисторного ключа VT1 Iб1 Iн/1. Следовательно,

В схеме рис 13а, когда транзистор VT2 открыт, потенциал его коллектора падает и выходное напряжение эмиттерного повторителя уменьшается. При емкостном характере нагрузки ток разряда конденсатора протекает через диод VD2 и открытый транзистор VT2. Однако использование диода VD2 увеличивает выходное напряжение ключа в нижнем состоянии до уровня приблизительно 0.8 В.
При таком решении приходится либо мириться с повышенным остаточным напряжением коллектор-эмиттер ключа, со значительным падением напряжения на эмиттерном повторителе. Подобные ключи используются обычно для управления слаботочной нагрузкой, в схемах микропривода. В подобной схеме легко реализовать плавное (аналоговое) управление током нагрузки, изменяя величину резистора R2, либо изменяя каким либо способом ток базы транзистора VT1. Для защиты от бросков напряжения при коммутации индуктивной нагрузки верхние ключи снабжаются встроенными демпферными диодами с заземленными анодами.
Схема верхнего ключа, выполненного с использованием комбинации транзисторов p-n-p и n-p-n типа (Рис 13б) позволяет получить меньшее падение напряжения на ключевом транзисторе. Рассмотрим работу этой схемы. При высоком входном сигнале транзистор VT2 открывается и входит в насыщение. Резистор R2 задает ток базы транзистора VT1, благодаря чему он также оказывается насыщенным.
 . Отсюда можно найти
. Отсюда можно найти 
Резистор R3 шунтирует переход база-эмиттер транзистора VT1, обеспечивая утечку начального базового тока запертого транзистора VT2. Важно, чтобы при протекании начального тока VT2 через резистор R3 на нем падание напряжения не превышало 0.7 В. Обычно достаточно выбрать R3=0.1R2. Достоинством схемы Рис 13б является малое остаточное напряжение на ключе – порядка 0.10.2 В. Резистор Rб, как и в предыдущей схеме, обеспечивает режим насыщения транзистора VT2, а резистор R1 согласование порогового напряжения входного логического сигнала с пороговым напряжение ключа VT2. Диоды VD1,2 защищают схему от отрицательных выбросов напряжения, возникающих при работе на индуктивную нагрузку или шину.
Полумост, мост
В простейшем случае полумост является комбинацией верхнего и нижнего ключей со схемой управления (рис 2.12 и 2.13), исключающей их одновременное включение, в том числе при переходных процессах. Это требование выполняется, как правило, путем введения фиксированных или программируемых задержек включения одного ключа после выключения другого. Известны и более совершенные адаптивные схемы управления, обеспечивающие исключение протекания сквозных токов в широком диапазоне режимов применения.
Основное применение ключей по схеме полумост и мост - для переключения направления тока в нагрузке. Например, управление током в обмотке электродвигателя постоянного тока, обмотке шагового двигателя, обмотке трансформатора преобразователя напряжения и т.д.
Моделирование нижнего ключа
Для моделирования режима нижнего ключа соберем схему (рис 14). Транзистор Q1 сначала выбираем типа “Ideal”. Прибор М1 контролирует скорость вращения, М2 – напряжение на коллекторе ключевого транзистора Q1, М3,4 – токи статорной и роторной обмотки. Ток базы транзистора при моделировании задается источником тока I1 и выбирается заведомо больше, чем ток базы насыщения.
 |  |
Рис 14. Схема для выбора транзистора нижнего ключа
Нажав клавишу пуск моделирования, зафиксируем токи и напряжение на ключе. Напряжение Uкэ насыщенного транзистора составляет 0.077 В, ток коллектора насыщения Iк нас=1,5 А. Для получения характеристики управления ключа используем режим моделирования Analysis/Parameter Sweep. Вариации параметров проводим для источника тока I1 в базе транзистора, а выходное напряжение контролируем на коллекторе транзистора. Из графика видно, что при токе на входе больше 17 мА транзистор входит в насыщение.
Передаточные характеристики ключей на некоторых транзисторах из библиотеки EWB показаны на рис 15.
 Транзистор 2N2712 (National) |  Транзистор ZTX1047A (Ztex) |
Рис.15 Передаточные характеристики ключей на разных транзисторах.
Видно, что транзистор 2N2712 (фирмы National) при существующих токах базы в насыщение не входит; по этой причине он не пригоден для данной задачи. Транзистор FMMT38B (фирмы Ztex) насыщается при токе базы I1>3 мА и напряжение на насыщенном транзисторе составляет Uкэ нас=0.138 В, что можно считать удовлетворительным.
 |  |
Рис 16. Схема нижнего ключа и его характеристика управления
Для того чтобы управлять ключом от логического элемента, необходимо, чтобы входной ток управления ключом не превышал выходного тока ЛЭ. Транзистор должен иметь большой коэффициент усиления по току , или предпочтительнее использовать составной транзистор, как показано на рис 1. Усиление по току выполняется дополнительным маломощным транзистором, возьмем 2N2712 фирмы National. Резистор R1 в цепи базы Q1 обеспечивает гальваническую связь эмиттера транзистора Q2 с землей, чтобы начальный эмиттерный ток запертого транзистора Q2 не приоткрывал транзистор Q1. Результат моделирования в режиме Analysis/Parameter Sweep приведен на рисунке рядом. При входном токе свыше 40 мкА транзистор входит в насыщение и напряжение на коллекторе насыщенного транзистора Uкэ_нас составляет 0.914 В, что конечно больше чем у одиночного транзистора, но тоже приемлемо.
Моделирование верхнего ключа
Особенностью верхнего ключа является то, что база ключевого транзистора находится под потенциалом источника питания. Необходим согласующий каскад, который преобразует логические сигналы управления, привязанные к земле, в сигналы управления ключевого транзистора. Предпочтительнее в качестве верхнего ключа использовать транзистор p-n-p, включенный по схеме с общим эмиттером. В насыщенном состоянии на нем падает минимальное остаточное напряжение. Если в качестве ключа использовать транзистор n-p-n, то его приходиться включать по схеме с общим коллектором, при этом на нем падает заметно большее напряжение. Хотя транзисторы p-n-p уступают по быстродействию транзисторам n-p-n типа, но в современной элементной базе достаточный выбор транзисторов на различные токи и напряжения и схема верхнего ключа с p-n-p транзистором широко используется особенно в регуляторах с импульсным или ШИМ управлением. Типовая схема верхнего ключа показана на рис 17.
Соберем схему ключа на транзисторах модели “Ideal”, но с разработанной моделью двигателя MG1 24V1A.
 |  |
Рис 17. Схема верхнего ключа и его характеристика управления
В качестве управляющего сигнала для удобства моделирования используем источник ток I1. Транзистор Q1 является преобразователем уровня. Когда транзистор Q1 открыт и насыщен, потенциал его коллектора близок к потенциалу земли. Резистор R1 задает ток базы ключевого транзистора Q2 Iб2=Еп/R1. Ток Iб2 должен быть больше тока базы насыщения Q2, чтобы Q2 находился в режиме насыщения. Iб2Iб_нас=Iк_нас/2, где Iк_нас=Iротор=1.5 А. Пусть 2=50. Тогда Iб_нас=1.5 А/50=0.03 А. Резистор должен быть R1 Еп/R1=24 В/0.03 А=800 Ом. В схеме рис.17 возьмем его равным 1 кОм, а при моделировании уточним его величину.
Резистор R2 обеспечивает гальваническую связь эмиттера и коллектора транзистора Q2 для надежного запирания; чтобы начальный базовый ток запертого транзистора создавал падение напряжения на R2 менее 0.6 В. Поэтому также пока возьмем R2=1 кОм. Диод D1 защищает транзистор от импульсов напряжения, возникающих при коммутации индуктивной нагрузки. Вольтметр М2 контролирует напряжение Uкэ транзистора Q2.
Проверим работу схемы в режиме ручного моделирования, нажав клавишу Activate Stimulation в правом верхнем углу рабочего поля. Вольтметр М2 должен показывать доли вольта, что подтверждает насыщение транзистора Q2. Двигатель должен обеспечивать максимальные обороты. Убедившись в работоспособности схемы на идеальных транзисторах, выбираем из библиотеки EWB реальные транзисторы; последовательно начиная с Q2 и убедившись, что режим насыщения выполняется, а затем выбираем библиотечный транзистор Q1. После выбора транзисторов, проводим детальное исследование схемы и уточнение параметров резисторов.
Мостовая схема управления
На базе разработанных схем верхнего и нижнего ключей соберем мостовую схему управления двигателем, показанную на рис 18. Ключ S1 переключает направление вращения двигателя. Проверку работоспособности схемы проверяем при ручном моделировании. Убеждаемся, что двигатель обеспечивает номинальные обороты при переключении ключа S1. Заменив ключ S1 на ключ с временной задержкой Time Delay Switch с временем Time On=0.5 с и Time Off =3 c, проведем моделирование в режиме Analysis/ Transient. Время моделирования от 0 до 5 с. Выходной сигнал – число оборотов двигателя. Результат моделирования приведен на рис 19.

Рис 18. Мостовая схема управления двигателем.

Рис 19. Динамические характеристики двигателя при реверсировании направления вращения.
Из графика видно, что время переходного режима двигателя при реверсировании направления вращения составляет около 1 с.
Логическая схема управления мостом должна обеспечивать следующие действия в роторной обмотке:
Логическим сигналом Start/Stop – 1/0 – включать и выключать ток, при этом обеспечивая режим медленного торможения Slow;
Логическим сигналом Left/Right – 1/0 – менять направление тока;
Сигналом PWR - 1/0 включать и выключать ток при заданном направлении тока;
Сигналами концевых выключателей блокировать вращение в том направлении, с которого пришел нулевой сигнал концевого выключателя и не препятствовать вращению в противоположном направлении. Например, ограничить вращение влево, если левый концевой выключатель устанавливается в 0, но не препятствовать при этом вращению вправо.
Сигналом Fast – обеспечивать режим быстрого торможения.
Пример реализации драйвера с логикой управления (без режима быстрого торможения) для усовершенствованной мостовой схемы показан на рис 20. Концевые выключатели End Switch L и End Switch R в нормальном режиме удерживают логический уровень 1; в крайнем положении соответствующий концевой датчик устанавливает 0.

Рис 20. Драйвер двигателя с логикой управления без режима Fast.
Входные ключи с pull-up резисторами имитируют соответствующие сигналы управления. Проверка логики управления производится в ручном режиме, переключая входные сигналы.
Для упрощения начертания сложных схем EWB имеет возможность создавать схемы разных уровней – так называемые Subcircuit – схемы нижнего уровня; иногда их называют заказные интегральные схемы. Для этого на схеме рис 20 необходимо выделить участок схемы, который будет свернут в Subcircuit. При этом за пределы выделяемого участка из схемы необходимо вынести все компоненты, которые будут внешними к создаваемой ИС. Например, источник питания, земля, ключи имитации сигналов, вольтметр, двигатель (статорную обмотку следует совсем отключить от схемы). Когда участок схемы выделен в меню EWB, выполняем действие Circuit/Create Subcircuit. Даем наименование создаваемой ИС – Driver и выполняем одно из действий меню по замене участка схемы компонентом Driver. В результате получается схема, показанная ниже.

Рис 21. Схема драйвера DC Motor с использованием заказной ИС Driver.
В корзине компонент Favorites (крайняя слева) появился созданный нами компонент Driver, который можно использовать как обычный компонент в неограниченном количестве.
Для моделирования динамических характеристик драйвера заменим;
ключ Start/Stop ключом с временной задержкой Time Delay Switch с параметрами Time On – 0.1 с, Time Off – 6 с,
ключ Left/Right ключом с временной задержкой и параметрами Time On – 2 с, Time Off – 4 с.
Результаты моделирования приведены на рис 22.

Рис 22. Динамические характеристики драйвера
Выводы: Разработанная схема драйвера имеет удовлетворительные динамические характеристики;
число оборотов в номинальном режиме 1500 об/мин,
ток статора – 0.2 А,
ток ротора – 1.5 А,
время разгона от 0 до номинальных оборотов – 0.2 с,
время реверсирования от номинальных оборотов в одну сторону до номинальных оборотов в другую сторону – 0.4 с,
время торможения при выключении питания – 3 с.