
Метод расчета напряженно-деформированного состояния канатного рабочего органа винтового конвейера
| Вид материала | Автореферат диссертации |
- Анализ напряженно деформированного состояния пары Статор-ротор винтового забойного, 39.6kb.
- «Определение напряженно-деформированного состояния и оценка остаточного ресурса технических, 62.81kb.
- Определение напряженно-деформированного состояния подземных магистральных нефтепроводов, 40.6kb.
- Разработка метода анализа напряженно деформированного состояния многослойных композиционных, 295.78kb.
- Автореферат диссертации на соискание ученой степени, 243.47kb.
- Программа научной конференции «геомеханика в горном деле», 112.96kb.
- Удк 001(06) Инновационные проекты, студенческие идеи, проекты, предложения, 24.41kb.
- Dynamic modelling of the is intense-deformed condition of elements axial-piston air, 113.53kb.
- Левачков Василий Васильевич исследование, 142.51kb.
- Приходько И. Ю.(Ичм), Чернов П. П.(Нлмк), Тимошенко В. И.(Итм), Акишин, 93.71kb.
На правах рукописи
Подуст Сергей Сергеевич
МЕТОД РАСЧЕТА НАПРЯЖЕННО-ДЕФОРМИРОВАННОГО СОСТОЯНИЯ КАНАТНОГО РАБОЧЕГО ОРГАНА ВИНТОВОГО КОНВЕЙЕРА
Специальность: 05.05.04 – «Дорожные, строительные
и подъемно-транспортные машины»
Автореферат диссертации
на соискание ученой степени
кандидата технических наук
Новочеркасск 2010 г.
Работа выполнена в Государственном образовательном учреждении высшего профессионального образования «Южно-Российский государственный технический университет (Новочеркасский политехнический институт)» на кафедре «Подъемно-транспортные машины и роботы»
Научный руководитель: Хальфин Марат Нурмухамедович
доктор технических наук
заслуженный деятель науки РФ
Официальные оппоненты: Евстратов Владимир Александрович
доктор технических наук
Сорокина Елена Владимировна
кандидат технических наук
Ведущая организация: Северо-Кавказский государственный
технологический университет
(Северо-Кавказский горно-
металлургический институт),
г. Владикавказ
Защита состоится «2» апреля 2010 г. в 10.00 на заседании диссертационного совета Д.212.304.04 при Государственном образовательном учреждении высшего профессионального образования «Южно-Российский государственный технический университет (Новочеркасский политехнический институт)» по адресу: 346428, г. Новочеркасск Ростовской области, ул. Просвещения, 132, ауд. 107 главного корпуса.
С диссертацией можно ознакомиться в библиотеке Южно-Российского государственного технического университета (Новочеркасского политехнического института). С текстом автореферата можно ознакомиться на сайте ЮРГТУ(НПИ) www.npi-tu.ru.
Автореферат разослан «___» февраля 2010 г.
Ученый секретарь диссертационного совета,
доктор технических наук В.С. Исаков
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность работы. Современный период развития рыночной экономики Российской Федерации предъявляет новые требования к транспортно-складским системам и логистике предприятия. В этих условиях необходимо стремиться к снижению затрат на транспортирование груза, путем сокращения количества подъемно-транспортного оборудования, оптимального функционально-стоимостного отбора оборудования с учетом всех имеющихся альтернативных технических и организационных решений, снижения эксплуатационных расходов, повышения надежности и продления жизненного цикла машин за счет оптимизации их конструкции.
Винтовые конвейеры в настоящее время широко применяются в строительстве, машиностроении, химической промышленности и сельском хозяйстве. К существенным недостаткам винтовых конвейеров относится невозможность транспортирования грузов по криволинейной траектории, большая вероятность возникновения заторов транспортируемого груза в местах установки промежуточных опорных подшипниковых узлов, загрязнение транспортируемого груза маслом из опорных промежуточных подшипников.
Помимо винтовых конвейеров с жесткими рабочими органами распространение получили так же винтовые конвейеры, в качестве рабочего органа которых применяется цилиндрическая винтовая спираль. Винтовые конвейеры с гибким рабочим органом используются для непрерывной подачи цементного раствора при строительстве, разгрузке железнодорожных вагонов, погрузке ядохимикатов в самолеты и их сброса на полях при борьбе с вредителями сельского хозяйства, подаче кормов в животноводческих комплексах, загрузке сырья в литьевые машины, экструдеры и реакционные аппараты в химической промышленности, для транспортирования смесей в пищевой промышленности, медикаментов в фармацевтической промышленности. К основным недостаткам винтовых конвейеров с гибким рабочим органом относятся: низкая производительность (максимальный рекомендуемый внутренний диаметр желоба гибкого шнека составляет 100 мм.), низкая надежность, высокая изгибная жесткость транспортирующей спирали, приводящая к ускоренному износу желоба и увеличению потребляемой мощности.
Таким образом, задача повышения производительности и вероятности безотказной работы винтовых конвейеров, уменьшения допустимого радиуса изгиба путем совершенствования структуры гибкого рабочего органа является весьма актуальной.
Соответствие диссертации научному плану работ ЮРГТУ (НПИ) и целевым комплексным программам. Диссертационная работа выполнена в рамках научного направления «Теория и принципы построения автоматизированных машин, робототехнических и механических устройств и систем», утвержденного Ученым советом ЮРГТУ (НПИ), по госбюджетной теме кафедры ПТМиР П3.842 «Экспертиза подъемно-транспортных машин повышенной опасности» и государственным контрактам № 6078 р/8683 в 2008 г. и № 7275 р./ 10127 в 2009 г. в рамках программы фонда содействия развитию малых предприятий в научно-технической сфере (фонд Бортника).
Цель работы. Повышение производительности и снижение вероятности отказа винтовых конвейеров путем использования в качестве гибкого рабочего органа пряди или каната двойной свивки и разработки метода расчета его напряженно-деформированного состояния.
Идея работы заключается в использовании в качестве гибкого рабочего органа винтового конвейера пряди или каната двойной свивки взамен однопроволочной винтовой транспортирующей спирали.
Методы исследования. Теоретические исследования напряженно-деформированного состояния канатного рабочего органа проведены на основании теоретических положений строительной механики каната, теоретической механики и теории машин непрерывного транспорта с применением математического моделирования, интегрального и дифференциального исчисления. Экспериментальные исследования напряженно-деформированного состояния канатного рабочего органа, скоростных режимов и потребляемой мощности винтового конвейера проведены дифференциальным методом измерений параметров с применением контрольно-измерительных приборов.
Научные положения работы, выносимые на защиту
1. Использование в качестве гибкого рабочего органа пряди или каната двойной свивки позволяет увеличить диаметр винтового конвейера на 25-50% за счет снижения изгибной жесткости канатного рабочего органа, что обеспечивает повышение производительности в 1,5 - 2 раза.
2. Метод расчета напряженно-деформированного состояния канатного рабочего органа с учетом влияния конструктивных, технологических и эксплуатационных факторов, различия способов закрепления и переменности нагрузки по его длине, позволяющий получить рациональные геометрические параметры винтового конвейера.
3. В качестве обобщенного показателя напряженно-деформированного состояния канатного рабочего органа принята абсолютная деформация кручения его хвостовой части, учитывающая различные схемы закрепления, конструктивные, технологические и свивочные параметры, прочностные свойства, переменность нагрузки по длине и позволяющая оценить комплексное воздействие эксплуатационных, конструктивных и режимных факторов.
4. Метод определения минимально-допустимого радиуса кривизны канатного рабочего органа винтового конвейера из условия отсутствия пластических деформаций.
Научная новизна работы
1. Повышение вероятности безотказной работы и производительности винтового конвейера достигается использованием в качестве гибкого рабочего органа пряди или каната двойной свивки, обеспечивающим существенное увеличение диаметра конвейера за счет снижения изгибной жесткости рабочего органа винтового конвейера и снижение вероятности отказа за счет появления нагруженного резерва, состоящего из параллельно работающих элементов (проволок).
2. Метод расчета напряженно-деформированного состояния канатного рабочего органа, который в отличие от известных учитывает линейное изменение нагрузки по длине и радиальную податливость от взаимодействия с транспортируемым грузом, позволяющий определить рациональные конструктивные параметры канатного рабочего органа.
3. Использование в качестве обобщенного показателя напряженно-деформированного состояния канатного рабочего органа абсолютной деформации кручения его хвостовой части, определенной с учетом различных схем закрепления, конструктивных, механических, свивочных параметров, вида транспортируемого груза, позволяет оценить удельное влияние эксплуатационных, конструктивных и режимных факторов.
4. Метод определения минимально-допустимого радиуса кривизны канатного рабочего органа винтового конвейера в отличие от известных учитывает механические свойства материала, конструктивные параметры, геометрические характеристики его элементов и позволяет исключить возникновение пластических деформаций, приводящих к отказу винтового конвейера.
Обоснованность и достоверность научных положений подтверждается применением современных апробированных методов исследований, таких как анализ научных трудов по теме исследования, методы планирования теоретических и экспериментальных исследований, выполненных с помощью современного программного обеспечения ЭВМ (MathCad, Excel, Visual Basic), использованием приборного комплекса, а так же действующей физической моделью, оснащенной контрольно-измерительными приборами, сходимостью результатов теоретических и экспериментальных исследований (расхождение не превышает 15%).
Значение работы
Научное значение работы состоит в том, что получен и обоснован метод расчета напряженно-деформированного состояния канатного рабочего органа винтового конвейера с учетом линейного изменения нагрузки по длине и радиальной податливости от взаимодействия с транспортируемым грузом, получен способ уточнения функциональных зависимостей расчетных параметров винтового конвейера нахождением экспериментальных поправочных коэффициентов для различных условий и режимов работы с учетом конструктивных особенностей его рабочего органа.
Практическое значение работы заключается в следующем:
- предложенная методика позволяет выбрать рациональную конструкцию канатного рабочего органа, определить параметры его напряженно-деформированного состояния и геометрические характеристики поперечного сечения, оценить влияние особенности формы поверхности канатного рабочего органа на производительность винтового конвейера;
- алгоритм и программа расчета позволяют определить рациональные параметры канатного рабочего органа, обеспечивающие повышение производительности и вероятности безотказной работы винтового конвейера для транспортирования сыпучего груза;
- разработана и изготовлена экспериментальная установка винтового конвейера с канатным рабочим органом для транспортирования сыпучих грузов, защищенная патентами РФ на изобретение.
Реализация результатов работы:
- На ООО «ПК «НЭВЗ» прошла производственные испытания экспериментальная установка винтового конвейера с канатным рабочим органом для транспортирования сыпучих грузов.
- На ООО «ПК «НЭВЗ» и ОАО «Замчаловское карьероуправление» внедрена методика расчета винтового конвейера с канатным рабочим органом.
- В учебный процесс при подготовке инженеров по специальности 190205 – «Подъемно-транспортные, строительные, дорожные машины и оборудование» специализации «Подъемно-транспортные машины» и специальности 190602 – «Эксплуатация перегрузочного оборудования портов и транспортных терминалов» внедрена экспериментальная установка винтового конвейера с канатным рабочим органом и методика его расчета.
Апробация работы
Основные положения диссертационной работы доложены и одобрены на Всероссийском конкурсе научно-технического творчества ВУЗОВ «Эврика-2005», г. Новочеркасск, ЮРГТУ(НПИ), 2005 г.; на 8-ой Международной научно-технической конференции, г. Новочеркасск, ЮРГТУ(НПИ), 2005 г.; на IV ом Международном научно-практическом коллоквиуме «Мехатроника-2008», г. Новочеркасск, ЮРГТУ(НПИ), 2008 г.; при прохождении зарубежной стажировки в рамках программы «Леонард Эйлер» в техническом университете г. Дрездена (TU Dresden), Германия, 2006 г., при прохождении зарубежной стажировки в Рейнско-Вестфальском техническом университете г. Аахена (RWTH Aachen), Германия, 2007 г., при прохождении зарубежной практики на Henschel Antriebstechnik GmbH Kassel (Производитель технологического оборудования для машиностроения и химической промышленности), г. Кассель, Германия, 2009 г; на молодежных инновационных конкурсах с присуждением научных грантов.
Публикации. По теме диссертации опубликовано 7 печатных работ, в том числе 5 в научных изданиях, рекомендованных ВАК РФ, получено два патента РФ на изобретение и одно положительное решение на выдачу патента на изобретение.
ОСНОВНОЕ СОДЕРЖАНИЕ РАБОТЫ
Во введении представлено обоснование актуальности темы диссертационной работы, сформулированы цель, научная новизна, практическое значение работы, приведены сведения об апробации работы и научные положения, выносимые на защиту.
В первой главе представлен обзор литературных источников по вопросам повышения эффективности, надежности, снижения энергопотребления винтовых конвейеров, определения рациональных конструктивных и режимных параметров для различных эксплуатационных условий, получения математического описания процесса транспортирования грузов, их взаимодействия с рабочими органами.
Процессы взаимодействия рабочих органов транспортирующих машин с грузом исследованы в работах Г.М. Водяника, Г.Ш. Хазановича, Ю.М. Ляшенко, А.С. Носенко, И.Ф. Рюмина, В.Г. Полежаева, В.Д. Ерейского, В.П. Максимова и других. В основном при рассмотрении этих процессов были получены функциональные зависимости конструктивных, режимных и технологических параметров рабочих органов от сил и моментов сопротивления, содержащие уточняющие коэффициенты, в зависимости от вида транспортируемого груза.
Исследованию процесса транспортирования груза в винтовом конвейере, получению математического описания винтового движения груза, повышению эффективности транспортирования грузов в винтовых конвейерах посвящены труды А.М. Григорьева, Д.Н. Башкатова, В.Я. Белецкого, Б.А. Катанова, М.Ф. Никифорова, В.А. Евстратова, Н.Н. Евстратовой, А.В. Евстратовой, Г.М. Симилейского, К.А. Адигамова, Б.В. Лихарева, П.В. Чеботарева.
Исследованием транспортирующих машин с гибким винтовым рабочим органом занимались А.М. Григорьев, П.А. Преображенский, В.П. Желтов, С.Н. Михайлов, В.В. Курманаевский, Ю.Л. Шкляр, А.Г. Новширванов. В большинстве работ этих ученых ставится задача определения требуемых конструктивных и режимных параметров винтовых конвейеров с гибким рабочим органом в зависимости от вида транспортируемого груза и эксплуатационных условий. Для винтовых конвейеров с гибким рабочим органом помимо малой производительности остро ставится проблема надежности транспортирующей спирали. В своей монографии H. Herrmann отмечает, что существенные перегрузки транспортирующей спирали могут длиться до 15 с. после запуска шнека и могут привести к разрушению гибкого рабочего органа. В связи с этим усовершенствование конструкций винтовых конвейеров с гибким рабочим органом происходило так же за счет добавления независимых винтовых элементов к рабочему органу. Известен гибкий шнек с двумя цилиндрическими спиралями, который запатентовал A. Taupin.Различные конструктивные исполнения приводов двухспиральных гибких шнеков с противоположным вращением спиралей обоснованы в диссертационной работе Курманаевского В.В. Трехспиральные гибкие шнеки, обоснования которым дал Преображенский П.А., обладают большей производительностью, но не позволяют транспортировать грузы по криволинейной траектории с большими углами перегиба. E.A. Wahl предложил в качестве рабочего органа применить стальную ленту, деформированную по винтовой линии.
Большинство работ по винтовым конвейерам с гибким рабочим органом направлено на повышение производительности и получение требуемых конструктивных решений для конкретных эксплуатационных условий в зависимости от вида транспортируемого груза. При этом мало внимания уделяется повышению надежности винтового конвейера с гибким рабочим органом, снижению потребляемой мощности при транспортировании груза по криволинейной траектории без потери производительности. Кроме того, для спиральных винтовых конвейеров малые углы перегиба криволинейной траектории предпочтительнее по причине высокой изгибной жесткости рабочего органа, приводящей к потерям мощности на трение о внутреннюю поверхность желоба и преждевременному износу трущихся поверхностей. Таким образом, вопрос повышения эффективности винтового транспортирования груза по криволинейной траектории, надежности винтового конвейера с гибким рабочим органом, увеличения допускаемых углов перегиба, позволяющего транспортировать грузы по сложной пространственной траектории, изучен не достаточно.
Проведенный обзор литературных источников позволил установить потребность в усовершенствовании конструкции винтового конвейера с гибким рабочим органом с целью повышения его надежности, производительности, снижения энергопотребления, выбрать направления работы и сформулировать задачи исследований. Анализ научных трудов показал, что в настоящее время отсутствует математическое описание напряженно-деформированного состояния гибких рабочих органов винтовых конвейеров, представляющих собой пряди или канаты двойной свивки.
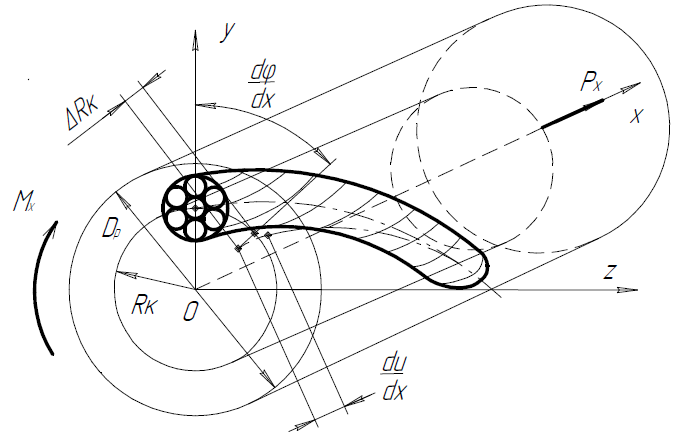
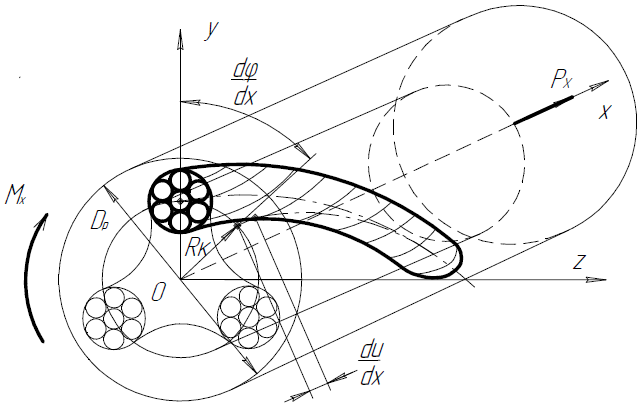
Во второй главе представлены теоретические положения диссертационной работы, получена математическая модель напряженно-деформированного состояния гибкого рабочего органа, учитывающая переменность нагрузки по длине и его радиальную податливость от взаимодействия с транспортируемым грузом. При перемещении груза гибкий рабочий орган находится в сложном напряженно-деформированном состоянии, вызванным воздействием внешнего крутящего и внешним растягивающим усилием (рис. 1).
а
б
Рис. 1. Расчетные схемы параметров напряженно-деформированного состояния канатного рабочего органа (а – в виде пряди; б – в виде каната двойной свивки)
Для расчета канатного рабочего органа применены уравнения статики профессора М.Ф. Глушко, которые были решены им с учетом постоянства воздействия внешних рабочих нагрузок по длине. Гибкий рабочий орган в виде пряди (Рис. 1, а) подвержен радиальной податливости от взаимодействия с транспортируемым грузом, поэтому уравнения статики имеют вид:
 (1)
(1) где
 ,
,  ,
,  - растягивающее усилие, крутящий момент и нормальное давление стержневых элементов на сердечник;
- растягивающее усилие, крутящий момент и нормальное давление стержневых элементов на сердечник;  ,
,  ,
,  - относительные продольная, угловая и поперечная деформации;
- относительные продольная, угловая и поперечная деформации;  - число прядей канатного рабочего органа;
- число прядей канатного рабочего органа;  - агрегатные коэффициенты жесткости каната двойной свивки,
- агрегатные коэффициенты жесткости каната двойной свивки,  - изменение радиуса свивки рабочего органа.
- изменение радиуса свивки рабочего органа. Для рабочего органа представляющего собой канат двойной свивки система уравнений (1) примет вид:
 (2)
(2)Из теории винтовых конвейеров известно, что крутящий момент гибкого рабочего органа изменяется пропорционально его длине от максимального значения в головной части до нулевого в хвостовой, следовательно:
 , (3)
, (3)где
 - максимальное значение крутящего момента винтового конвейера,
- максимальное значение крутящего момента винтового конвейера,  - координата на оси рабочего органа,
- координата на оси рабочего органа,  - длина рабочего органа.
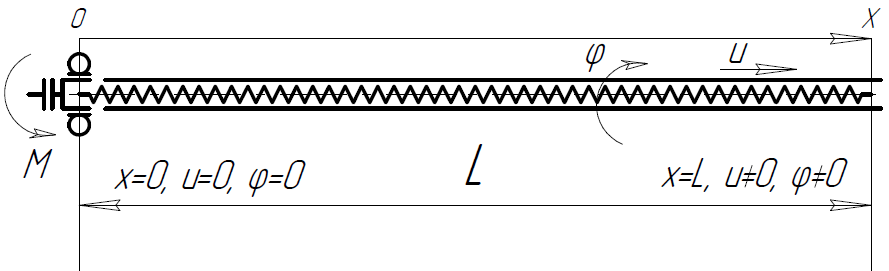
- длина рабочего органа. Крутящий момент передается рабочему органу с помощью муфты специальной конструкции, в которой он крепится жестко. Поэтому приводной конец рабочего органа (Рис. 2) не имеет осевых и угловых перемещений, следовательно, при
 и
и  . Для неприводного конца возможны два случая: 1 – неприводной конец канатного рабочего органа не перемещается и свободно вращается относительно продольной оси (Рис. 2, а), 2 – неприводной конец канатного рабочего органа свободно перемещается и вращается относительно продольной оси
. Для неприводного конца возможны два случая: 1 – неприводной конец канатного рабочего органа не перемещается и свободно вращается относительно продольной оси (Рис. 2, а), 2 – неприводной конец канатного рабочего органа свободно перемещается и вращается относительно продольной оси (Рис. 2, б).
В случае закрепления неприводного конца рабочего органа от осевых перемещений при
 и
и  (Рис. 2, а). Решая систему уравнений (1) с учетом (3) получим выражения для определения относительных и абсолютных линейных и угловых деформаций:
(Рис. 2, а). Решая систему уравнений (1) с учетом (3) получим выражения для определения относительных и абсолютных линейных и угловых деформаций: ,
,  . (4)
. (4) ,
,  . (5)
. (5)где
 - определитель системы уравнений (1).
- определитель системы уравнений (1). 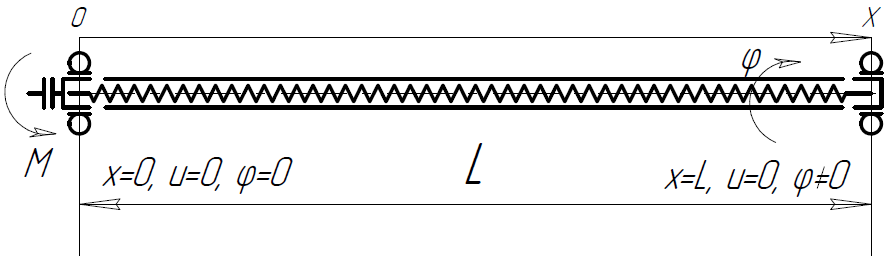
а
б
Рисунок 2. Конструктивные исполнения винтового конвейера
с канатным рабочим органом:
а) – со свободным вращением и отсутствием осевого перемещения неприводного конца;
б) – со свободным вращением и осевым перемещением неприводного конца.
Абсолютные угловые деформации принимают максимальные значения для хвостовой части при
: (6)
(6)Уравнения (4) и (5) преобразованы в другой вид зависимостей от абсолютных угловых деформаций канатного рабочего органа:
 ,
,  . (7)
. (7)На основании уравнений (4) и (5) были получены выражения для определения напряжений кручения, изгиба и растяжения канатного рабочего органа, неприводной конец которого закреплен от осевых перемещений. Получены зависимости напряжений кручения канатного рабочего органа от его абсолютных угловых деформаций:
 , (8)
, (8)где
 - модули упругости II-го рода,
- модули упругости II-го рода,  - диаметр проволоки рабочего органа,
- диаметр проволоки рабочего органа,  - угол свивки проволок. Получены зависимости напряжений изгиба канатного рабочего органа от его максимальной абсолютной угловой деформации:
- угол свивки проволок. Получены зависимости напряжений изгиба канатного рабочего органа от его максимальной абсолютной угловой деформации: . (9)
. (9)Получены зависимости напряжений растяжения канатного рабочего органа от его максимальной абсолютной угловой деформации:
 , (10)
, (10)где
 и - соответственно радиус и угол свивки слоя проволок;
и - соответственно радиус и угол свивки слоя проволок;  - угол свивки;
- угол свивки;  - радиус свивки канатного рабочего органа;
- радиус свивки канатного рабочего органа;  - модуль упругости I-го.
- модуль упругости I-го.При закреплении неприводного конца канатного рабочего органа от осевых перемещений относительные поперечные деформации определяются из выражения:
 .
. В случае свободного осевого перемещения хвостовой части рабочего органа от осевых перемещений при
,  и (Рис. 2, б). Тогда выражения для определения относительных и абсолютных линейных и угловых деформаций имеют вид:
и (Рис. 2, б). Тогда выражения для определения относительных и абсолютных линейных и угловых деформаций имеют вид: ,
,  , (11)
, (11) ,
,  . (12)
. (12)Абсолютные линейные и угловые деформации канатного рабочего органа принимают максимальные значения при
: , (13)
, (13) (14)
(14)Уравнения (11) и (12) преобразованы в другой вид зависимостей от абсолютных угловых деформаций канатного рабочего органа:
 ,
,  , (15)
, (15) ,
,  . (16)
. (16)На основании уравнений (11),(12) и (15),(16) были получены выражения для определения напряжений кручения, изгиба и растяжения канатного рабочего органа, неприводной конец которого не закреплен от осевых перемещений. Получены зависимости напряжений кручения, изгиба и растяжения канатного рабочего органа от его максимальных абсолютных угловых деформаций:
 (17)
(17) (18)
(18) (19)
(19)Зная из экспериментов величину удлинения неприводного конца канатного рабочего органа
 можно определить значение
можно определить значение  :
:  .
.При транспортировании сыпучих грузов по криволинейной траектории канатный рабочий орган винтового конвейера подвергается изгибу, который оказывает существенное влияние на его напряженно-деформированное состояние.
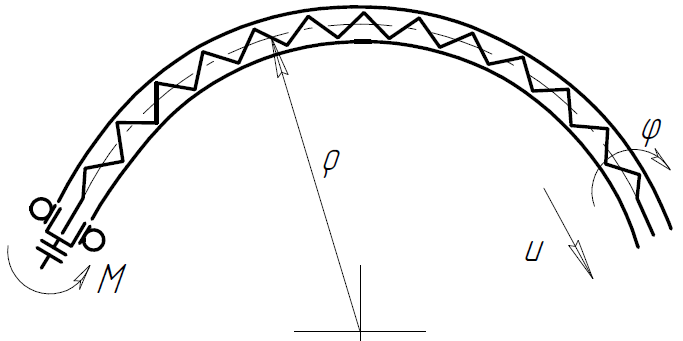
Рис. 3. Изгиб канатного рабочего органа на криволинейном
участке траектории
При изгибе рабочего органа на криволинейных участках траектории в его проволоках возникающие дополнительные напряжения, которые определяются по формулам (Рис. 3), полученным профессором М.Ф. Глушко и профессором М.Н. Хальфиным:
 (20)
(20)где
 и
и  - напряжения изгиба по осям
- напряжения изгиба по осям  и
и - напряжения кручения по оси
- напряжения кручения по оси  ,
,  - радиус кривизны оси рабочего органа,
- радиус кривизны оси рабочего органа,  - коэффициент кривизны по нормали,
- коэффициент кривизны по нормали,  - коэффициент кривизны по бинормали,
- коэффициент кривизны по бинормали,  - коэффициент кручения.
- коэффициент кручения.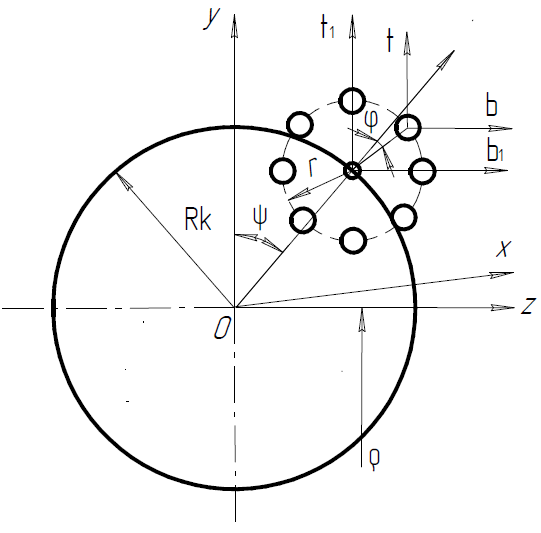
Рис. 4. К определению изгибных деформаций проволок
канатного рабочего органа двойной свивки
Для проволок пряди и каната двойной свивки:
 , (21)
, (21)где
 - полярный угол для проволоки пряди,
- полярный угол для проволоки пряди,  - полярный угол для пряди каната.
- полярный угол для пряди каната. Результирующее напряжение, возникающее при изгибе канатного рабочего органа, определяется по общеизвестной формуле:
 . (22)
. (22)Минимальный радиус изгиба канатного рабочего органа при условии обеспечения прочности определяется из выражения:
 ,
,  ,
,где
 - максимальный диаметр проволоки,
- максимальный диаметр проволоки,  - коэффициент волнистости,
- коэффициент волнистости,  - предел прочности материала проволоки,
- предел прочности материала проволоки,  - минимальный радиус изгиба проволоки транспортирующей спирали,
- минимальный радиус изгиба проволоки транспортирующей спирали,  - диаметр транспортирующей спирали.
- диаметр транспортирующей спирали. Обобщенный показатель напряженно-деформированного состояния канатного рабочего органа учитывает различные схемы закрепления, конструктивные, технологические и свивочные параметры, прочностные свойства и переменность нагрузки по длине:
 , (23)
, (23)где
- длина рабочего органа,  - временное сопротивление материала проволоки рабочего органа,
- временное сопротивление материала проволоки рабочего органа,  - коэффициент запаса прочности.
- коэффициент запаса прочности.Таким образом, полученные выражения позволяют провести расчет гибкого рабочего органа винтового конвейера на прочность при различных способах закрепления его хвостовой части с учетом переменности нагрузок по длине и радиальной податливости от взаимодействия с грузом.
В третьей главе проведены исследования влияния конструктивных параметров канатного рабочего органа на его напряженно-деформированное состояние и производительность винтового конвейера. Предложен алгоритм (рис. 5) и программа расчета, позволяющие определить рациональные параметры канатного рабочего органа, обеспечивающие повышение производительности и надежности винтового конвейера для транспортирования сыпучего груза. Математическое моделирование напряженно-деформированного состояния канатного рабочего органа проводится на ПЭВМ с применением пакета прикладных программ MathCad.
Теоретические исследования показали, что конструкция гибкого рабочего органа со свободным осевым перемещением неприводного конца предпочтительнее, так как максимальные напряжения гибкого рабочего органа при закреплении неприводного конца от осевого перемещения в 2-3 раза превышают максимальные напряжения кручения гибкого рабочего органа при свободном осевом перемещении неприводного конца.
В гибком рабочем органе крестовой свивки возникают нормальные напряжения, которые в 2 раза выше чем в гибком рабочем органе односторонней свивки, а жесткость на кручение гибкого рабочего органа односторонней свивки в 2-3 раза превышает жесткость на кручение гибкого рабочего крестовой свивки, следовательно, предпочтительной является конструкция гибкого рабочего органа односторонней свивки.
Для исследования параметров производительности транспортирующего шнека, оснащенного гибким рабочим органом, разработан алгоритм расчета. Рабочая программа реализована с применением электронных таблиц MS Office Excell 2003. В результате теоретических исследований установлено, что производительность шнека с канатным рабочим органом от 2,2 до 4,6 раз (при рассмотрении канатов по ГОСТ - 2688-80, 3071-88, 3077-80, 3079-80, 3083-80, 3089-80, 3097-80, 7666-80.) превышает производительность шнека, оснащенного транспортирующей спиралью. В результате теоретических исследований производительности установлено, что конструкция гибкого рабочего органа на основе пряди каната односторонней двойной свивки предпочтительнее, чем однопроволочная транспортирующая спираль
Рис. 5. Общий алгоритм расчета параметров напряженно-деформированного состояния гибкого канатного органа
Надежность канатного рабочего органа винтового конвейера, представляющего собой прядь или канат двойной свики (Рис. 6, а), значительно превышает надежность винтовой транспортирующей спирали (Рис. 6, б). Это достигается снижением вероятности отказа за счет наличия в канатном рабочем органе нагруженного резерва, состоящего из параллельно работающих элементов (проволок).
а б
Рис. 6. Логические структурные схемы надежности рабочих органов
Преимущество канатного рабочего органа над транспортирующей спиралью с точки зрения надежности оценивается как отношение их вероятностей отказа:
В четвертой главе для подтверждения результатов теоретических исследований представлены результаты экспериментальных исследований напряженно-деформированного состояния гибкого рабочего органа и процесса транспортирования сыпучего груза на экспериментальной установке винтового конвейера с гибким рабочим органом.
Лабораторная установка для проведения экспериментальных исследований напряженно-деформированного состояния канатного рабочего органа содержит (рис. 7): канатный рабочий орган 1, помещенный в эластичный желоб 2; загрузочное устройство 3; разгрузочное устройство с дозатором 4; электропривод 5, состоящий из червячного редуктора и асинхронного электродвигателя; частотный преобразователь 6 для управления электроприводом; датчик угловых перемещений хвостовой части рабочего органа 7; датчик угловых перемещений хвостовой части рабочего органа 8; датчик линейных перемещений хвостовой части рабочего органа 9; электронную схему системы управления считыванием импульсов угловых датчиков 10; счетчик разности импульсов с угловых датчиков 11; счетчик импульсов с датчика линейных перемещений 12; опорную раму электропривода и загрузочного устройства 13; опорную раму разгрузочного устройства 14; шарнирное сочленение опорных рам 15; подвижный в продольном направлении подшипниковый узел 16 на салазках опорной рамы, который может закрепляться болтами в зависимости от условий эксперимента.
Рис. 7. Общий вид экспериментального стенда для исследования
напряженно-деформированного состояния канатного рабочего органа
Экспериментально установлено, что среди канатных рабочих органов трехпрядный наиболее предпочтительней, так как его производительность больше чем у однопрядного и двухпрядного. Гибкий рабочий орган в виде пряди каната двойной свивки предпочтительней чем транспортирующая спиральная проволока, так как его производительность больше чем у спиральных аналогичного диаметра и изгибной жесткости.
Производительность винтового конвейера с канатным рабочим органом, имеющим тангенциальные зазоры во внешнем слое свивки, превышающими кусковатость транспортируемого груза, в среднем на 15% больше производительности винтового конвейера с аналогичным рабочим органом без зазоров во внешнем слое свивки
При изменении крутящего момента экспериментальные абсолютные продольные и угловые деформации канатного рабочего органа изменяются по линейному закону, характерному так же для теоретических зависимостей (рис. 8).
Проведение экспериментальных исследований позволило уточнить формулу крутящего момента шнека, так как при изменении потребляемой мощности экспериментальный крутящий момент канатного рабочего органа изменяются по линейному закону, характерному так же для теоретической зависимости. Разница между экспериментальными и расчетными значениями крутящего момента не превышает 10%, таким образом, подтверждается справедливость математической модели напряженно-деформированного состояния канатного рабочего органа.
а б
Рис. 8. Влияние крутящего момента на продольные и угловые деформации канатного рабочего органа: а) линия 1 и 2 – соответственно, теоретическая и экспериментальная зависимости абсолютной осевой деформации от крутящего момента; б) линия 1 и 2 – соответственно, теоретическая и экспериментальная зависимости абсолютной угловой деформации от крутящего момента
В результате экспериментальных исследований установлено:
- при изменении угла наклона желоба от 0° до 30° производительность снижается в среднем на 15%;
- потребляемая мощность винтового конвейера с транспортирующей спиралью в среднем на 15% превышает потребляемую мощность винтового конвейера с многожильным рабочим органом при одинаковом значении изгибной жесткости;
- коэффициент потерь мощности принимает значения 1,01 - 1,1 в зависимости от угла наклона желоба винтового конвейера и количества лопастей канатного рабочего органа;
- производительность винтового конвейера с канатным рабочим органом, конец которого свободно перемещается в осевом направлении, в среднем на 10% превышает производительность винтового конвейера с гибким рабочим органом, конец которого закреплен от осевых перемещений.
В результате экспериментальных исследований подтверждена адекватность математической модели напряженно-деформированного состояния гибкого рабочего органа, доказано преимущество канатного рабочего органа за счет более высокой производительности, надежности, снижения энергопотребления.
В пятой главе представлена методика расчета винтового конвейера с канатным рабочим органом, учитывающая экспериментальные поправочные коэффициенты для канатного рабочего органа, параметры свивки, направления свивки, сочетания направлений свивки, радиальной податливости, прочностных свойств и переменность нагрузки по его длине и позволяет определить конструктивные и режимные параметры винтового конвейера с канатным рабочим органом. Методика расчета винтового конвейера с канатным рабочим органом внедрена в учебный процесс и в производство на ОАО «Замчаловское карьероуправление».
Выводы по диссертационному исследованию
В диссертационной работе решена актуальная задача повышения производительности и вероятности безотказной работы винтового конвейера с гибким рабочим органом, заключающаяся в использовании канатного рабочего органа и разработке метода его расчета. Основные научные выводы и практические рекомендации, полученные по результатам исследований заключаются в следующем:
1. Разработана математическая модель напряженно-деформированного состояния канатного рабочего органа, учитывающая переменность нагрузки по длине и радиальную податливость от взаимодействия с транспортируемым грузом, позволяющая определить конструктивные параметры винтового конвейера с канатным рабочим органом
2. В результате теоретических исследований установлено:
- повышение производительности винтового конвейера в 1,5 - 2 раза достигается использованием в качестве гибкого рабочего органа пряди или каната двойной свивки, обеспечивающим увеличение диаметра конвейера на 25-50% за счет снижения изгибной жесткости канатного рабочего органа
- вероятность безотказной работы винтового конвейера возрастает за счет появления дополнительного нагруженного резерва, состоящего из параллельно работающих элементов (проволок) канатного рабочего органа
- допустимый радиус изгиба канатного рабочего органа винтового конвейера в среднем в 2 раза меньше допустимого радиуса изгиба однопроволочной транспортирующей спирали
- конструкция гибкого рабочего органа со свободным осевым перемещением хвостовой части предпочтительнее, так как максимальные напряжения гибкого рабочего органа при закреплении хвостовой части от осевого перемещения в 2-3 раза превышают максимальные напряжения кручения гибкого рабочего органа при ее свободном осевом перемещении
- в канатном рабочем органе крестовой свивки возникают нормальные напряжения, которые в 2 раза выше чем в гибком рабочем органе односторонней свивки, а жесткость на кручение гибкого рабочего органа односторонней свивки в 2-3 раза превышает жесткость на кручение гибкого рабочего крестовой свивки, следовательно, предпочтительной является конструкция гибкого рабочего органа односторонней свивки
- производительность винтового конвейера с канатным рабочим более чем в 2 раза превышает производительность винтового конвейера, оснащенного транспортирующей спиралью, при этом конструкция канатного рабочего органа на основе пряди каната двойной односторонней свивки по ГОСТ-7668-80 является наиболее эффективной
3. Разработана и изготовлена экспериментальная установка винтового конвейера с канатным рабочим органом, оснащенная комплексной электронной системой исследования технических и конструктивных параметров устройства и процесса пологонаклонного транспортирования сыпучего груза, которая позволила подтвердить адекватность математической модели напряженно-деформированного состояния и преимущества канатного рабочего органа.
4. В результате экспериментальных исследований установлено:
- производительность винтового конвейера с канатным рабочим органом, неприводной конец которого свободно перемещается в осевом направлении, в среднем, на 10% превышает производительность винтового конвейера с канатным рабочим органом, неприводной конец которого закреплен от осевых перемещений, следовательно, конструкция винтового конвейера с канатным рабочим органом, имеющим осевые перемещения неприводного конца, предпочтительнее;
- производительность винтового конвейера с канатным рабочим органом, имеющим тангенциальные зазоры во внешнем слое свивки, превышающими номинальный размер частиц транспортируемого груза, в среднем на 15% превышает производительность винтового конвейера с аналогичным канатным рабочим органом без зазоров во внешнем слое свивки;
- по параметрам производительности среди канатных рабочих органов - канатов двойной свики предпочтительнее конструкция трехлопастного канатного рабочего органа по сравнению с двухлопастным и однолопастным
- по параметрам производительности среди спиральных рабочих органов предпочтительнее конструкция однопрядного рабочего органа по сравнению с односпиральным
ПУБЛИКАЦИИ ПО ТЕМЕ ДИССЕРТАЦИОННОЙ РАБОТЫ
В изданиях, рекомендованных ВАК РФ
- Подуст С.С. Влияние сочетания направлений свивки гибкого винта модуля мехатронного шнека на его предельную нагрузку/ М.Н. Хальфин, С.С. Подуст, С.К. Кондрашова, А.С. Логвинов// Известия высших учебных заведений. Северо-Кавказский регион. Технические науки.-2008 -. Спец. выпуск «Проблемы мехатроники-2008» - С.22–24.
- Подуст С.С. Расчет основных параметров гибкого винта транспортирующего шнека/ М.Н. Хальфин, С.С. Подуст// Известия высших учебных заведений. Северо-Кавказский регион. Технические науки.-2008 .-№1(143).- С. 56–58.
- Подуст С.С. Определение экспериментальной зависимости производительности винтового конвейера с гибким винтом от скорости транспортирования гранулированного сыпучего груза/ С.С. Подуст, Р.К. Шагеев// Известия ТулГУ. Технические науки.-2009 г.- Вып. 2, часть 1. - С. 65 – 72.
- Подуст С.С. Расчет гибкого винта шнека с учетом неравномерности распределения нагрузок по длине/ М.Н. Хальфин, С.С. Подуст, Р.К. Шагеев// Известия ТулГУ. Технические науки.-2009 г.- Вып. 2, часть 1. - С. 254 – 258.
- Подуст С.С. Расчет гибкого винта шнека с учетом переменности крутящего момента по его длине/ М.Н. Хальфин, С.С. Подуст, Р.К. Шагеев// Известия высших учебных заведений. Северо-Кавказский регион .-2009.-№6(154).-С.80–83.
В других изданиях
- Подуст С.С. Расчет гибкого винта транспортирующего шнека/ М.Н. Хальфин, С.С. Подуст// Научно-техническое творчество студентов вузов: материалы Всерос. смотра-конкурса науч.-техн. творчества студ. вузов «Эврика-2005». –Новочеркасск: ЮРГТУ, 2005.– Ч.2. – С. 287 – 290.
- Подуст С.С. К расчету шнека-модуля мехатронной системы/ М.Н. Хальфин, С.С. Подуст// Новые технологии управления движением технических объектов: сб. статей по материалам 8-й Междунар. науч.-техн. конф., г. Новочеркасск, 14-16 дек. 2005. – Ростов н/Д. Изд-во СКНЦ ВШ. С. 27 – 28.
- Пат. № 2289538 RU МПК В65G 33/26, В65G 33/16. Винтовой конвейер для транспортировки сыпучих грузов/ Хальфин М.Н., Подуст С.С. – Заявл. 05.07.2005 // Изобретения (Заявки и патенты). – Опубл 20.12.2006, Бюл № 35.
- Пат. № 2343099 RU МПК В65G 33/26, В65G 33/16, В65G 33/08. Винтовой конвейер с подвижной опорой/ Хальфин М.Н., Подуст С.С. – Заявл. 12.02.2007 // Изобретения (Заявки и патенты) –Опубл 10.01.2009, Бюл № 1.
- Положительное решение о выдаче патента РФ на изобретение
от 28.01.10. Винтовой конвейер с гибким винтом. Заявка № 2009112117.
Подуст Сергей Сергеевич
МЕТОД РАСЧЕТА НАПРЯЖЕННО-ДЕФОРМИРОВАННОГО СОСТОЯНИЯ КАНАТНОГО РАБОЧЕГО ОРГАНА ВИНТОВОГО КОНВЕЙЕРА
Автореферат
Подписано в печать 18.02.2010
Формат 6084 1/16. Бумага офсетная. Печать цифровая.
Усл. печ. л. 1,0. Уч.-изд. л. 1,5. Тираж 120 экз. Заказ 81.
_________________________________________________________________
Отпечатано в Издательстве ЮРГТУ (НПИ)
346428, г. Новочеркасск, ул. Просвещения, 132