
Исследование и разработка регулирующего устройства высокооборотного вентильного двигателя с возбуждением от постоянных магнитов
| Вид материала | Исследование |
- Темы курсового проекта «Разработка системы автоматического регулирования скорости двигателя, 71.05kb.
- Разработка и исследование вентильного двигателя с постоянными магнитами на основе математического, 437.62kb.
- Совместное действие электромагнитов и постоянных магнитов мг-3 Канарёв, 71.4kb.
- Интеллектуальный электропривод на основе вентильного двигателя Для запорной арматуры, 247.46kb.
- Возможности формирования магнитных полей с заданным распределением индукции на центральной, 9.53kb.
- "Новый способ изготовления постоянных магнитов из магнитопластов" Тезисы доклада, 24.05kb.
- ─ иметь объективное понятие об автоматической системе регулирования (аср) как совокупности, 141.38kb.
- Лабораторная работа №1 математическое моделирование систем, 23.08kb.
- Сафиуллин Николай Тахирович исследование, 64.17kb.
- «Исследование асинхронного конденсаторного двигателя», 34.15kb.
На правах рукописи
ХРОМОВ ИЛЬЯ СЕРГЕЕВИЧ
ИССЛЕДОВАНИЕ И РАЗРАБОТКА РЕГУЛИРУЮЩЕГО УСТРОЙСТВА
ВЫСОКООБОРОТНОГО ВЕНТИЛЬНОГО ДВИГАТЕЛЯ
С ВОЗБУЖДЕНИЕМ ОТ ПОСТОЯННЫХ МАГНИТОВ
Специальность 05.09.01. "Электромеханика и электрические аппараты"
АВТОРЕФЕРАТ
Диссертации на соискание ученой степени
Кандидата технических наук
Москва, 2011
Работа выполнена на кафедре «Электрические и электронные аппараты» Национального исследовательского университета МЭИ.
| Научный руководитель: | доктор технических наук, профессор Розанов Юрий Константинович |
| Официальные оппоненты: | Доктор технических наук, Антонов Борис Михайлович, Кандидат технических наук, доцент Котеленец Николай Федорович. |
| Ведущая организация: | ОАО АКБ «Якорь». |
Защита диссертации состоится 17 февраля 2012 года в 15 час. 00 мин. в аудитории Е-205 на заседании диссертационного совета Д 212.157.15 при Московском энергетическом институте по адресу: 111250, г. Москва, Красноказарменная улица, дом 13, строение 1.
С диссертацией можно ознакомиться в библиотеке Национального исследовательского университета МЭИ.
Отзыв на автореферат в двух экземплярах, заверенных печатью, просим отправлять по адресу: 111250, г. Москва, Красноказарменная улица, дом 14, Ученый совет МЭИ (ТУ).
Автореферат разослан « 16 » января 2012 г.
Ученый секретарь
диссертационного совета Д212.157.15 ______________ Боровкова А.М.
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность работы. Синхронный двигатель с возбуждением от постоянных магнитов (СДПМ), благодаря своим высоким эксплуатационным характеристикам, является наиболее перспективной машиной в диапазоне малых и средних мощностей. СДПМ простой по конструкции, не имеет потерь на возбуждение и обладает высокой стабильностью скорости ротора. Эти качества выделяют его из ряда всех остальных машин и обеспечивают ему применение в системах автоматики, приводах подачи станков, прецизионных системах слежения, а также системах, где стабильность скорости является первостепенным требованием, предъявляемым к технологическому процессу.
Совершенствование магнитных материалов и конструкций ротора позволило расширить применяемость СДПМ в область высокооборотных машин и агрегатов, добавив к перечисленным преимуществам компактность и высокую надежность.
Тем не менее, решения на базе высокооборотных двигателей отличаются крайне высокой стоимостью. Дело в том, что работа с высокооборотными СДПМ (ВСДПМ) без информации о положении ротора не представляется возможной. Есть 2 способа решения проблемы: установка датчика положения ротора (ДПР), либо использование алгоритмов бездатчикового управления. ДПР для высокооборотных двигателей – это оптические энкодеры, чувствительные к нагреву и механическим воздействиям. Помимо высокой стоимости и ненадежности, возникают проблемы крепежа энкодера, например, в компрессорах, где ротор находится внутри корпуса. Все это, в конечном счете, влияет на цену пары регулирующее устройство (РУ) - ВСДПМ.
Алгоритмы вычисления положения ротора по сигналам встроенных в РУ датчиков напряжения и тока, так называемые алгоритмы бездатчикового векторного управления, существуют в достаточном количестве для СДПМ стандартной частоты (50-100 Гц), постоянно совершенствуются и за исключением передовых наработок находятся в открытом доступе. В высокооборотной области все совершенно не так. Ввиду крайней коммерческой привлекательности направления, а, следовательно, и особой заинтересованности ведущих мировых производителей приводной техники в сохранении наработок в области управления высокооборотными СДПМ внутри компаний, количество публикаций по теме стремится к 0. Россия здесь лишь отражает общемировую тенденцию.
В данной работе проанализированы существующие алгоритмы бездатчикового векторного управления, на их основе предложен новый эффективный способ управления (cosφ ~ 1) ВСДПМ средней мощности. Алгоритм основан на идее минимизации тока Id вращающейся системы координат, что автоматически приводит к улучшению электрических и эксплуатационных показателей. Предложенный метод прост математически и не требует высокой производительности процессора, что особенно важно для информационно перегруженных контроллеров РУ ВСДПМ.
Так же представлено РУ ВСДПМ в составе компрессора холодильной машины, а именно: рассмотрена структура устройства управления, приведены принципиальные схемы системы управления и структура устройства управления, а также рассмотрены результаты эксперимента.
Цель диссертационной работы заключается в разработке алгоритма векторного бездатчикового управления, структуры и методик проектирования РУ средней мощности (сотни кВт) для высокооборотных СДПМ.
Для достижения поставленной цели были решены следующие задачи:
- определена область применения высокооборотных СДПМ,
- проведен анализ электромагнитных процессов, возникающих во время работы СДПМ. Определены критерии оптимального управления для достижения максимального момента на валу. Выведена формула расчета угла поворота ротора (угла нагрузки).
- проведен анализ существующих алгоритмов управления СДПМ,
- на основе пункта 2 предложен алгоритм управления высокооборотными СДПМ,
- разработана структура РУ, реализующая предложенный способ и алгоритм управления,
- разработана компьютерная модель РУ, состоящая из управляемого выпрямителя и автономного инвертора напряжения. На основе модели проведен анализ статических и динамических режимов работы РУ с связке с СДМП. Доказана принципиальная возможность создания физического образца РУ.
- разработана методика проектирования РУ. Проведено полное физическое моделирование в связке с высокооборотным СДПМ, номинальной мощностью 100 кВт, 30000 об/мин.
Методы исследований. Для решения поставленных задач были использованы методы математического анализа, методы теории линейных электрических цепей (прямые методы расчета электрических цепей), методы математического моделирования (система сквозного проектирования Matlab 6.5).
Достоверность научных результатов, изложенных в работе, обеспечена корректным применением апробированных методов анализа электромагнитных процессов в силовых электронных устройствах и подтверждается результатами компьютерного и физического моделирования.
Научную новизну представляют:
- новый принцип управления мощными высокооборотным СДПМ,
- алгоритм управления и структура РУ, позволяющие реализовать этот алгоритм на современной элементной базе,
- математическая модель РУ, делающая возможным анализ статических и динамических режимов работы,
- методика проектирования РУ.
Практическую ценность представляют:
- алгоритм управления и структура РУ, обеспечивающие наилучшие энергетические показатели (cosφ ~ 1),
- математическая модель РУ, являеющаяся удобным инструментом для исследования характеристик ВСДПМ и анализа алгоритмов управления,
- методика проектирования РУ, позволяющая значительно сократить время разработки устройств с заданными характеристиками.
Реализация работы. Основные научные и практические результаты использованы в разработке новых РУ , как самостоятельных изделий, так и в качестве составных частей других устройств, в ЗАО «ЭЛСИЭЛ».
Апробация работы. Результаты диссертационной работы докладывались и обсуждались на второй Всероссийской конференции «Силовая электроника», XXVIII межрегиональной научно-технической конференции «Проблемы эффективности и безопасности функционирования сложных технических и информационных систем», научно-технической конференции «Инновационные разработки и опыт применения микросхем ЗАО «ПКК Миландр» в аппаратуре специального и двойного назначения».
Публикации. По материалам диссертации опубликовано 4 работы, из них: 1 - статья в издании по спискам ВАК («Электротехника»); 3 – работы в материалах научно-инженерных конференций.
Основные положения, выносимые на защиту:
- алгоритм векторного бездатчикового управления РУ ВСДПМ, основанный на принципе минимизации тока Id вращающейся системы координат,
- структура РУ для ВСДПМ средней мощности, отражающая заданный алгоритм и основанная на схеме двойного регулирования – напряжение постоянного звена контролирует преобразователь понижающего напряжения, а частоту автономный инвертор напряжения.
- математическая модель РУ, делающая возможным анализ статических и динамических режимов работы,
ОСНОВНОЕ СОДЕРЖАНИЕ РАБОТЫ.
В первой главе приведен анализ всех известных способов управления обычными синхронными двигателями с возбуждением от постоянных магнитов (СДПМ), с целью выбора основы для алгоритма управления мощным ВСДПМ.
В настоящее время существует несколько способов управления СДПМ, как применяемых на практике, так и перспективных, ожидающих дальнейшего прогресса в области микропроцессорной техники:
- Наблюдатели состояния. Наблюдатель – это математическая модель объекта, на вход которой поступают измеряемые компоненты вектора состояния объекта, а на выходе выдаётся оценка всего вектора состояния. Применение наблюдателей состояния является естественным способом восстановления значения вектора состояния с использованием матричного представления системы.
Наблюдатель используется для предсказания значения токов на 1 цикл вперед, что решает проблему устранения запаздывания управления. Однако предлагаемая система построена без учета магнитного насыщения, потерь в меди и стали, анизотропности ротора двигателя (индуктивности по осям d и q приняты равными), что снижает оптимальность предлагаемого метода.
- Системы со скользящими режимами (ССР). Развитие цифровых способов управления позволяет создавать новые уникальные регуляторы на базе таких, казалось бы, старых и давно испробованных алгоритмов, каким является алгоритм управления с использованием скользящего режима.
Недостатками такого метода являются возможная потеря устойчивости на участке достижения поверхности переключения, высокочастотные переключения, которые ведут к быстрому износу механических и электрических частей привода, высокие требования к преобразователю.
- Нейронные сети (НС), использованные для построения алгоритма управления СДПМ. Основу каждой НС составляют относительно простые, в большинстве случаев – однотипные, элементы (ячейки), имитирующие работу нейронов мозга. Далее под нейроном будет подразумеваться искусственный нейрон, то есть ячейка НС. Каждый нейрон характеризуется своим текущим состоянием по аналогии с нервными клетками головного мозга, которые могут быть возбуждены или заторможены. Он обладает группой синапсов – однонаправленных входных связей, соединенных с выходами других нейронов, а также имеет аксон – выходную связь данного нейрона, с которой сигнал (возбуждения или торможения) поступает на синапсы следующих нейронов. Общий вид нейрона приведен на рисунке 1.
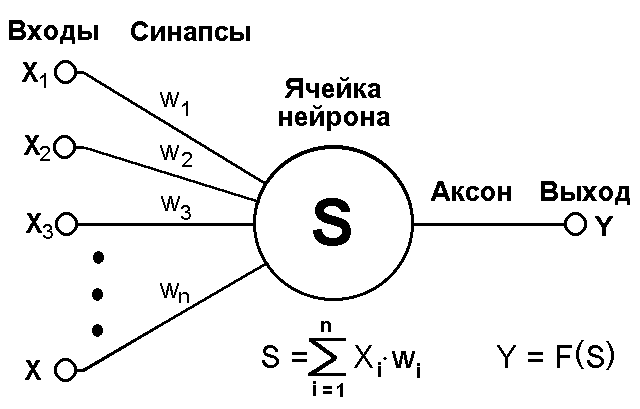
Рис. 1. Общий вид нейрона.
Алгоритмы расчета НС не относятся к простым алгоритмам по вычислительной нагрузке. Поэтому реализация НС, в полной мере реализующих векторное управление в современных промышленных контроллерах, невозможна. Это, пожалуй, главный недостаток НС.
- Прямое управление моментом может быть осуществлено при питании синхронного двигателя от инвертора тока. Такие системы обладают рядом преимуществ: достигается робастность по отношению к разбросу параметров, упрощается алгоритм управления за счет отсутствия токового контура регулирования, обеспечивается высокое быстродействие системы.
К недостаткам метода ПУМ следует отнести наличие пульсаций в электромагнитном моменте и потокосцеплении, что снижает точность регулирования, повышает электропотребление и увеличивает акустический шум.
- Качественно новым методом управления СДПМ является использование наблюдателя неопределенностей. Это направление в данной области получило развитие в самое последнее время. Неопределенностями модели СДПМ являются индуктивность статора, активное сопротивление статора и момент инерции ротора. Целью данного метода является формирование структуры системы управления СДПМ с компенсацией неопределенностей, работоспособной во всем рабочем диапазоне скоростей ротора. Основной недостаток, как и у метода НС, только один - повышенная сложность алгоритмов управления, делающая невозможным оптимизацию метода для высокооборотных СДПМ в условиях реализации на современных микроконтроллерах.
Во второй главе производится анализ электромагнитных процессов с возбуждением от постоянных магнитов на основе физической модели обобщенной электрической машины (ОЭМ) с целью определить критерии оптимального управления электродвигателем.
Электрическая схема ОЭМ имеет вид, представленный на рисунке 2.
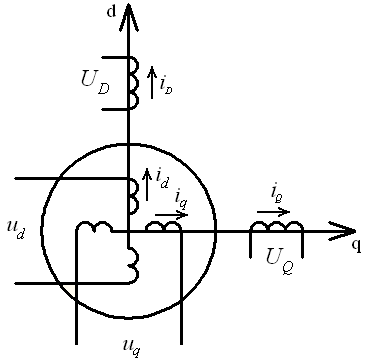
Рис. 2. Электрическая схема ОЭМ.
Выражения потокосцеплений обмоток ОЭМ имеют вид:
 (1)
(1)где LD, LQ, Ld, Lq – индуктивности соответствующих обмоток;
Мd, Мq - взаимные индуктивности обмоток статора и ротора по осям d и q;
ΨD, ΨQ, Ψd, Ψq – мгновенные значения потокосцеплений машины;
iD, iQ, id, iq – мгновенные значения токов обмоток машины.
Запишем (1) в развернутом виде:
Запишем эту систему уравнений в матричном виде:
 (2)
(2)Систему уравнений (2) можно привести к виду:
 ,(2.10)
,(2.10)где
 .
.Приложенное к контуру напряжение равно падению напряжения на активном сопротивлении и сумме трансформаторной противо-ЭДС, зависящей от изменения потокосцеплений, и противо-ЭДС вращения, зависящей от движения контура.
Умножим обе части уравнения (2.10) на транспонированный вектор тока iT. Получим выражение для мощности:
 . (3)
. (3) представляет собой механическую мощность машины Рм. отсюда электромагнитный момент М будет равен:
представляет собой механическую мощность машины Рм. отсюда электромагнитный момент М будет равен: .(4)
.(4)Выражения для момента СДПМ получим из формулы 4:
 (5)
(5)Первое слагаемое в формуле – основной синхронный момент, второе слагаемое – реактивный синхронный момент от явнополюсности ротора.
Если число пар полюсов больше 2, то принимают, что
 =
= ,таким образом, максимальный момент двигателя достигается, при значении угла нагрузки
,таким образом, максимальный момент двигателя достигается, при значении угла нагрузки  = 90°.
= 90°.Третья глава посвящена моделированию РУ, предназначенного для управления производительностью синхронного магнитоэлектрического (вентильного) двигателя. РУ должно обеспечивать плавный пуск двигателя и его работу в штатных режимах, различающихся частотой вращения и моментом сопротивления. РУ состоит из понижающего преобразователя напряжения и трехфазного мостового инвертора (на транзисторах).
Таким образом, силовая часть преобразователя сделана по схеме двойного регулирования: напряжение постоянного звена регулирует понижающий преобразователь напряжения (ППН), а частоту выходного напряжения трехфазный инвертор напряжения (ТИН). Выбор структуры преобразователя продиктован использованием 180º управления ключами инвертора.
При пуске двигателя, задается линейное возрастание частоты инвертора (с постоянным ускорением Kf = 200 Гц/с) от нуля (или некоторой небольшой величины) до номинального значения (1000 Гц). Управление ключами инвертора выполняется на частоте основной гармоники, изменяющейся (в соответствии с заданием) в диапазоне от нуля до 1000 Гц. Предполагается, что на каждом из шести равных интервалов периода работают одновременно три ключа инверторного моста (так называемое 180-градусное управление). Для упрощения модели преобразователя в ее состав включены только инвертор и ППН, получающий питание от источника постоянного напряжения (480 В).
Моделирование проводилось для двух режимов работы: установившегося и переходного.
В результате моделирования установившегося режима получена серия осциллограмм, а именно:
- линейные токи двигателя;
- скорость вращения;
- момент двигателя;
- ток, потребляемый от источника;
- вычисленный угол положения ротора;
- ток Id;
- линейное напряжение;
- напряжение источника питания;
В результате моделирования переходного режима получены серии осциллограмм, отображающие поведение системы в процессе пуска и разгона, а также в режиме сброса-наброса нагрузки. Наблюдаемые переменные:
- линейные токи двигателя;
- скорость вращения;
- момент двигателя;
- ток, потребляемый от источника;
- ток Id;
- линейное напряжение;
- напряжение источника питания;
Расчеты главы 2 подтверждены, при помощи математического моделирования статических и динамических режимов работы устройства в программе Simulink. Моделирование алгоритма работы РУ доказало принципиальную возможность создания физического образца РУ высокооборотного вентильного двигателя с заданными характеристиками.
В четвертой главе приводится методика проектирования РУ высокооборотного СДПМ. Для РУ, работающих в паре с ВСДПМ, определяющим топологию фактором является именно высокооборотность нагрузки. Невозможность использования ШИМ методов регулирования выходного напряжения приводит к необходимости использования дополнительного преобразователя энергии в составе РУ. В случае использования ШИМ (от 10 кГц) мощность общих потерь в модуле увеличивается в 3 и более раз, по сравнению с методом 180-градусного (или аналогичных) управления.
В зависимости от входного напряжения преобразователь будет понижающим или повышающим, но он будет всегда. В подавляющем большинстве случаев преобразователь понижающий, поэтому в дальнейшем будем говорить именно о понижающем преобразователе напряжения (ППН). Распространенная схема ППН представлена на рис. 3.
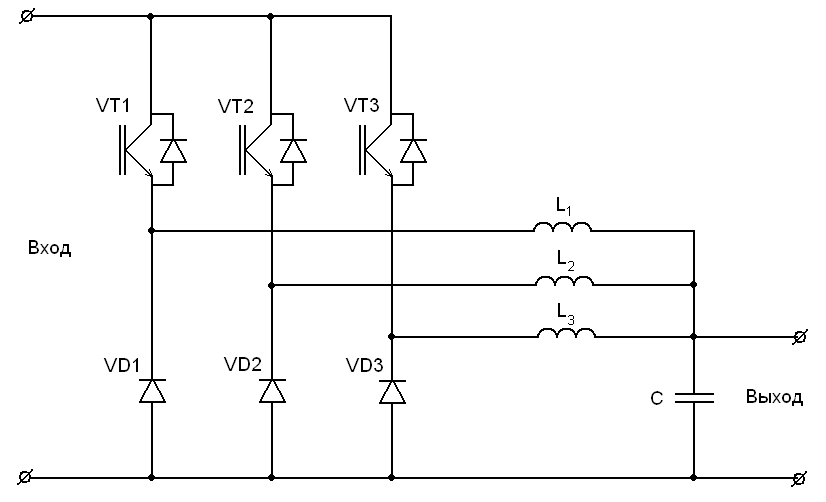
Рис. 3. Оптимальная схема ППН.
Корректность работы ППН напрямую зависит от правильности расчета индуктивностей дросселей L1..3 и емкости конденсатора С. Следует учесть, что одной из функций РУ является автоподхват двигателя в случае кратковременной пропажи питания. Для ее реализации необходимо чтобы на входе ППН не было дополнительных конденсаторов, которые было бы необходимо заряжать с помощью специального устройства. Тогда на вход ППН будет подано выпрямленное (на диодном мосте) 3-фазное напряжение 380 В, имеющее значительные пульсации 460-540 В.
В работе сформулированы критерии подбора номиналов индуктивностей дросселей и емкости конденсаторов, а так же формулы расчета их номинальных значений.
Для корректной работы РУ помимо настройки фильтров ППН необходимо выбрать оптимальное решение по силовым коммутаторам и элементам охлаждения. Растущее многообразие решений, применяемых в силовой электронике, специализация типов компонентов привели к тому, что сравнение близких по назначению силовых модулей на основании только справочных данных стало серьезной проблемой. Предельные данные тока и напряжения транзистора или модуля, обычно вынесенные в заголовок технических характеристик, не дают разработчику никаких данных для расчета, а лишь позволяют в первом приближении сравнить один элемент с другим. Сложность выбора компонента заключается и в том, что желательно максимально использовать его мощностные характеристики, чтобы не платить лишних денег за неоправданный запас по мощности. В пункте 4 настоящей главы приведена методика теплового расчета, позволяющая правильно рассчитать тепловые потери в коммутаторах, это позволит подобрать силовые ключи и элементы охлаждения согласно поставленной задачи и с заданной избыточностью.
Пятая глава посвящена разработке и испытаниям опытного образца РУ высокооборотного СДПМ.
Структурная схема РУ приведена на рис. 4.

Рис. 4. Структурная схема РУ, где ДН – датчик напряжения, ДТ – датчик тока, ТЧ – транзистор тормозного чоппера.
Подразумевается, что к выходам РУ подсоединяется высокооборотный СДПМ со следующими характеристиками:
- потребляемая мощность не более 100 кВт, при n=30000 об/мин,
- максимальная частота ЭД 1050 Гц,
- максимальный момент ЭД 32 Нм (момент на валу компрессора рассчитан с учетом потерь на трение и вентиляцию при диаметре ротора 88 мм и длине ротора 200мм),
- номинальный ток фазы ЭД 160А,
- номинальное напряжение линейное/фазное ЭД 450/260 В,
- сопротивление обмотки статора ЭД 0.01 Ом,
- индуктивность обмотки статора по продольной оси Ld 45,223 мкГн,
- индуктивность обмотки статора по поперечной оси Lq 23,885 мкГн.
На рис. 2 приложения 1 приведена схема электрическая принципиальная системы управления (далее СУ) РУ ВСДПМ. СУ базируется на двух микроконтроллерах компании TEXAS INSTRUMETS TMS320F2810. На момент разработки РУ эти микроконтроллеры (МК) являлись самыми производительными МК с набором периферии, предназначенной для управления преобразовательной техникой. Микроконтроллер D6 предназначен для управления понижающим преобразователем, D26 обслуживает инвертор. Микроконтроллеры общаются по дуплексной, 16 битной шине данных. Для предотвращения передачи ложных данных, применены помехозащищенные алгоритмы обработки информации.
В случае работы в аварийных режимах, на плате СУ предусмотрена аппаратная защита от перегрузочных токов, а также токов короткого замыкания. Сигнальные выходы компараторов защиты заведены на специальные порты контроллера, которые в случае аварии позволяют аппаратно снимать управляющие сигналы с силовых ключей РУ, предотвращая ударные воздействия токов короткого замыкания на кристаллы IGBT-транзисторов.
Для коммуникаций и управления на плате предусмотрено 2 интерфейса связи: RS232 и CAN (основной и резервный). RS232 является вспомогательным и, в случае продолжения работ по РУ ВСДПМ, может быть использован для удобств обслуживающего персонала, например для приключения диагностического пульта.
Проверка функционирования разработанного алгоритма проводилась на ненагруженный ВСДПМ. Стоит отметить, что для предложенного алгоритма данный режим работы с малой нагрузкой является самым тяжелым.
Осциллограммы фазных токов и напряжений, полученные во время работ, были подвергнуты математическому анализу. Для этого в программной среде MathCAD была написана подпрограмма, имитирующая алгоритм работы РУ ВСДПМ – по известной последовательности значений фазных токов Ia, Ib и линейных напряжений Uab, Ubc она восстанавливает значения токов id и iq вращающейся системы координат. Математическому анализу были подвергнуты осциллограммы снятые в следующих условиях: установившийся режим работы привода РУ, уставке id = 0, холостой ход, частота вращения 800 Гц. Результаты обработки приведены на рис. 5 и 6.
На рис. 5 сплошной линией изображен ток id, точечная линия соответствует току iq, пунктирная – среднее значение тока id. Масштаб по вертикали - 50 А/кл, по горизонтали 500 мкс/кл. Всплески id соответствуют моменту переключения пространственного вектора тока статора в следующее положение (всего 6 положений для 180 градусного управления). Усредненное значение тока id близко к 0, что соответствует заданию.
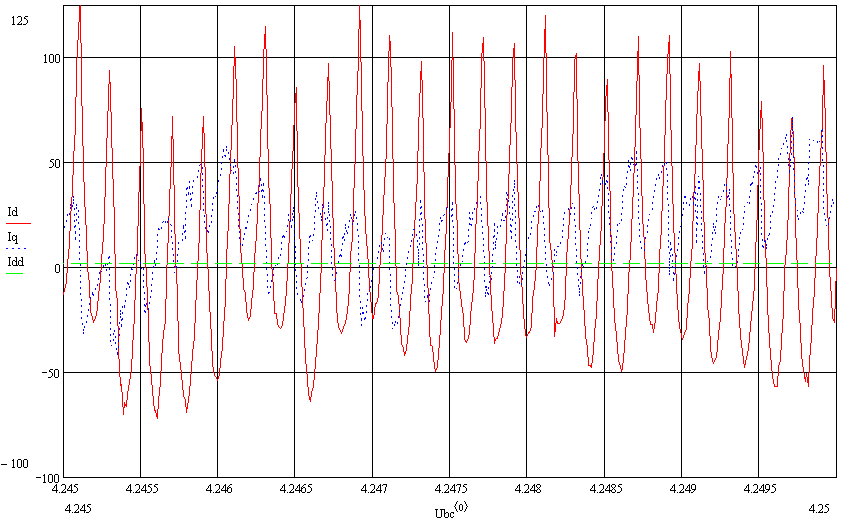
Рис. 5. Токи id, iq и усредненное значение id.
На рис. 6 сплошной линией изображен ток фазы А, точечная линия соответствует фазному напряжению, пунктирная – противо-ЭДС, наводимая в статорной обмотке фазы А двигателя. Масштаб по вертикали для тока – 100 А/кл, для напряжения – 100 В/кл, по горизонтали 500 мкс/кл.
Противо-ЭДС совпадает по фазе с фазным напряжением, что соответствует наибольшему возможному КПД.

Рис. 6. Ток фазы А, фазное напряжение и противоЭДС фазы А.
Основные результаты работы заключаются в следующем:
- проведен обзор современных способов управления СДПМ, акцентированы их преимущества и недостатки,
- выполнен анализ электромагнитных процессов СДПМ,
- разработан новый алгоритм управления ВСДПМ, обеспечивающий высокую робастность системы и оптимизированный для реализации на современной элементной базе,
- создана математическая модель РУ и двигателя в программе Simulink программного комплекса Matlab, реализующая предложенный алгоритм и подтвердившая его высокую эффективность,
- разработана цифровая система управления, позволяющая обеспечить высокое качество регулирования и адаптивность к внешним условиям,
- разработана инженерная методика расчёта параметров силовых компонентов РУ,
было проведено экспериментальное исследование работы РУ ВСДПМ на основе физического макета. Полученные результаты работы полностью совпадают с расчетными и показывают высокую эффективность разработанной цифровой системы управления.
Основные положения диссертации нашли отражение в следующих научных трудах:
1 Хромов И.С. Статический преобразователь частоты в составе высокооборотного вентильного привода, Кузькин В.И., Мелешкин В.Н., Мясищев С.В., Хромов И.С. // Журнал «Электротехника» №7 2010г,
2 Хромов И.С. Математическая модель регулирующего устройства высокооборотного вентильного двигателя с возбуждением от постоянных магнитов // «Вторая Всероссийская конференция «Силовая электроника» тезисы докладов. Том 2.
3 Хромов И.С. Энергоэффективные алгоритмы управления ВСДПМ // XXVIII межрегиональная научно-техническая конференция «Проблемы эффективности и безопасности функционирования сложных технических и информационных систем» сборник докладов том 2. стр. 132.
4 Хромов И.С. Статический преобразователь частоты в составе высокооборотного вентильного привода // «Инновационные разработки и опыт применения микросхем ЗАО «ПКК Миландр» в аппаратуре специального и двойного назначения». Сборник тезисов.
Подписано в печать . . Зак. Тир П.л.
Полиграфический центр МЭИ
Красноказарменная ул., д.13