
Методические указания к курсовой работе Самара 2005 г
| Вид материала | Методические указания |
- Методические указания к курсовой работе для специальностей 220100 Вычислительные машины,, 87.91kb.
- Методические указания к курсовой работе по дисциплине «Управленческие решения», 145.2kb.
- Методические указания к курсовой работе по дисциплине «численные методы», 134.12kb.
- Методические указания к курсовой работе для студентов специальности "Менеджмент организации", 623.79kb.
- Методические указания к курсовой работе Павлодар, 2007, 92.3kb.
- Методические указания по выполнению курсовой работы для студентов специальности 1-25, 359.05kb.
- Методические указания к курсовой работе по дисциплине «Теория автоматического управления», 552.83kb.
- Методические указания к выполнению курсовых работ по дисциплине «финансы и кредит», 489.86kb.
- Методические указания для выполнения курсовой работы по курсу информационные технологии, 382.89kb.
- Общие положения, 155.04kb.
Ф
 ЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
ЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИАЛЬНОГО ОБРАЗОВАНИЯ
«САМАРСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
| К а ф е д р а «Электронные системы и информационная безопасность» |
ПРОЕКТИРОВАНИЕ
МИКРОПРОГРАММНОГО
АВТОМАТА
НА ОСНОВЕ СХЕМНОЙ ЛОГИКИ
Методические указания к курсовой работе
Самара 2005 г
Составитель А.Д. АБРАМОВ
УДК 681. 32
Проектирование микропрограммного автомата на основе схемной логики. Метод. указ. к курс. работе.
Самар. гос. тех. ун.
Сост. А.Д. АБРАМОВ. Самара, 2005;
Приводятся методики и задания для выполнения курсовой работы по проектированию микропрограммного автомата на основе схемной логики.
Рассчитаны на студентов специальностей 201500, 075400 и других родственных специальностей.
Ил.5. Табл.2. Библиогр.:3
Печатается по решению редакционно – издательского совета СамГТУ
Проектирование микропрограммного автомата
на основе схемной логики
Составитель АБРАМОВ Алексей Дмитриевич
Редактор Н.В. В е р ш и н и н а
Технический редактор В.Ф. Е л и с е е в а
Подписано в печать 21.09.05
Формат 60x84 1/6. Бумага офсетная.
Печать офсетная
Усл. п. л. – 2,09. Уч.-изд. 2,0
Тираж 50 экз. С. 301.
___________________________________________________
Государственное образовательное учреждение
высшего профессионального образования
«Самарский государственный технический университет»
443100. г. Самара, ул. Молодогвардейская, 244.
Главный корпус.
Отпечатано в типографии
Самарского технического университета
443100. г. Самара, ул. Молодогвардейская, 244.
Корпус № 8.
1. Цель работы
Целью работы является закрепление теоретического материала по дисциплине «Цифровые устройства и микропроцессоры» и приобретение навыков самостоятельной работы по проектированию управляющих устройств (микропрограммных автоматов) на основе схемной логики.
2. Объём курсовой работы
Курсовая работа посвящена разработке функциональной схемы микропрограммного автомата, в основе которого лежит принцип схемной логики.
Курсовая работа (КР) оформляется в виде пояснительной записки объёмом 12-15 страниц и должна состоять из введения (2-3 страниц), содержательной части (10-12 страниц) и заключения (1-2 страницы).
В начале пояснительной записки (ПЗ) приводится её содержание и внешний вариант задания в виде блок – схемы алгоритма. Во введении приводится общая структура процессора, состоящая из двух блоков: операционного и управляющего, и поясняется их взаимодействие. Даётся описание управляющих и оповещающих сигналов, понятие микрооперации, микрокоманды и микропрограммы, а также двух принципов, используемых при построении микропрограммных автоматов. В содержательной части выполняется собственно проектирование микропрограммного автомата, которое заканчивается построением его функциональной схемы, состоящей из необходимых логических элементов и других цифровых устройств. В заключении ПЗ необходимо привести структурную схему процессора, программируемого на языке команд, т.е. структуру, в которой для каждой команды предусмотрено своё управляющее устройство. В конце ПЗ приводится библиографический список, используемый при написании ПЗ. Вся ПЗ надёжно брошюруется в формате А 4 (для удобства работ и сохранности).
3.Задание на курсовую работу
Задания на курсовую работу приведены в приложении. Каждое
1
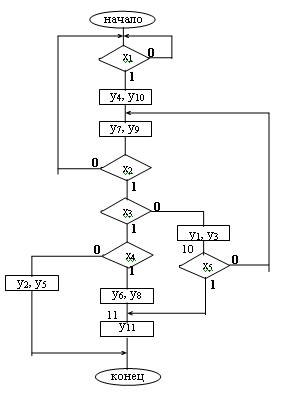
задание представляет собой блок – схему алгоритма в микрокомандах
которая описывает функционирование управляющего устройства при выполнении определённой команды. При необходимости студент консультируется у преподавателя в назначенное время по расписанию. Возможны консультации и по договорённости с преподавателем. После выполнения КР и написания ПЗ студент сдаёт её в назначенное расписанием время. Преподаватель может вернуть ПЗ студенту на доработку. После второго возврата студент должен получить новое задание по КР и выполнить его.
При защите КР оцениваются итоговой оценкой содержание ПЗ, доклад студента (~5 мин) на защите и ответы на вопросы как среднее арифметическое.
4.Методика проектирования микропрограммного автомата (автомата)
Процесс проектирования разобьём на этапы.
1.Построение графа функционирования.
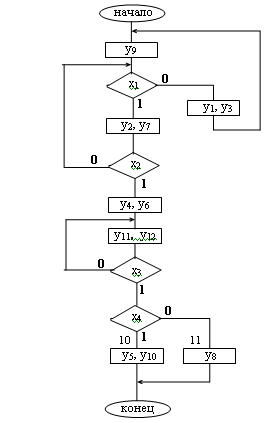
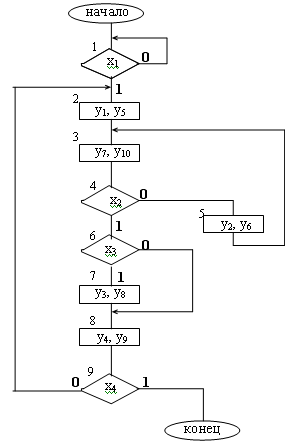
Управляющее устройство является логическим устройством последовательного типа. Микрокоманда, выдаваемая в следующем тактовом периоде, зависит от того, какая микрокоманда выдаётся в текущем тактовом периоде, или, иначе, от состояния, в котором находится устройство. Для определения состояния устройства произведём разметку схемы алгоритма, представленного в микрокомандах (см. рис.4.1) по следующему правилу: Символом а0 отметим начало и конец схемы. Далее последовательно отметим символами а1,а2 входы блоков, следующих за операторными блоками. Операторный блок – это блок, содержащий микрокоманды. Блок 1 является операторным блоком, и поэтому отмечаем символом а1 вход следующего за ним блока 2. Затем выбираем следующий операторный блок 4 и отмечаем символом а2 вход следующего за ним блока 5. Таким образом, выполняется разметка конкретной блок-схемы алгоритма полученного задания. Полученные отметки а0,a1, а2 соответствуют состояниям устройства, т.е. устройство должно иметь три соединения. Теперь можно приступить к построению графа функционирования устройства. Состояния устройства в графе представляются узлами. Дугами, соединяющими узлы, показывают возможные переходы эти переходы соответствуют переходам между соответствующими отметками. На дугах записываем условия, при которых происходит переход, и какая микрокоманда должна выдаваться устройством. Полученный таким
2
31
30
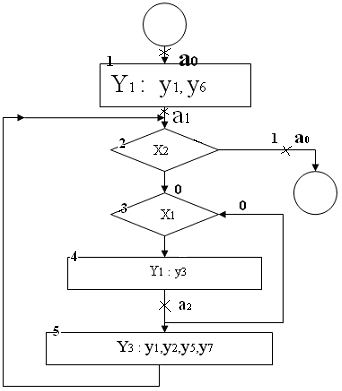
Р и с. 4.1 Схема алгоритма в микрокомандах:
Yi- микрокоманда; yi- микрооперация
образом граф переходов приведён на рис.4.2.
4.2.Кодирование состояний устройства
В процессе кодирования каждому состоянию устройства должна быть поставлена в соответствии некоторая кодовая комбинация. Число разрядов кода выбирается из следующих соображений: если число состояний М, то для обеспечения М кодовых комбинаций требуется К- разрядный код, где К – минимальное целое число, при котором выполняется неравенство М≤2К.
Для нашего случая М=3 и, следовательно, К=2.Соответствие между состояниями устройства и кодовыми комбинациями в табл.4.1
4.3.Структурная схема управляющего устройства
Структурная схема проектируемого устройства приведена на рис.4.3.
Дальнейшие шаги по проектированию управляющего устройства сводятся к синтезу его комбинационного узла.
4.4. Построение таблицы функционирования комбинационного узла
Таблица функционирования комбинационного устройства должна содержать графы, в которые заносятся данные текущего состояния,
3
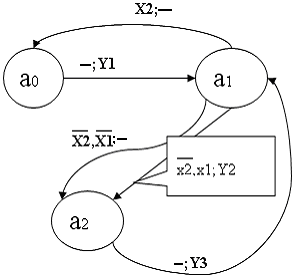
Р и с.4.2. Граф переходов для микропрограммного
автомата Мили.
Таблица 4.1.
| Состояния | Кодовые комбинации | ||
| Q2 | Q1 | ||
| a0 a1 a2 | 0 0 1 | 0 1 0 | |
4
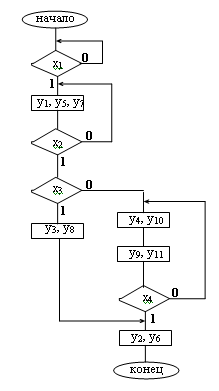
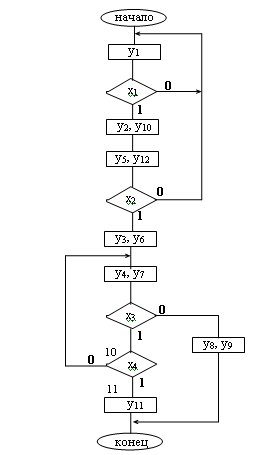
Вариант 20
Построить функциональную схему управляющего автомата Мили для следующей микропрограммы:
29
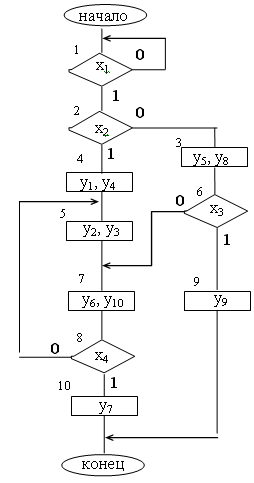
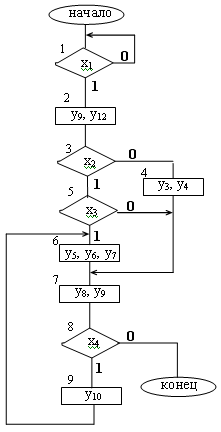
Вариант 19
Построить функциональную схему управляющего автомата Мили
для следующей микропрограммы:

28
Р и с. 4.3 Структурная схема управляющего устройства
значения входных условий, данные следующего состояния, в которое должно перейти устройство, и выходные сигналы комбинационного узла. Функционирование комбинационного узла рассматриваемого нами управляющего устройства представлено в таблице 4.2.
По значению текущего состояния и поступающим из операционного устройства значениям условий Х1 и Х 2 в таблице определяются следующее состояние, сигналы J2, K2, J1, K1, необходимые для установки триггеров в следующее состояние, и управляющие сигналы У1…У7.
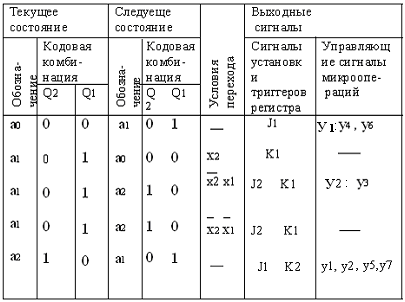
Таблица 4.2.
5
Заполнение таблицы производится следующим образом: в графе следующего состояния задаётся состояние а1. По графу переходов находится дуга, ведущая в узел а1 из узла а0 – текущего состояния. Переход из а0 в а1 безусловный. Заносим в таблицу кодовые комбинации состояний а0 и а1. При этом выясняется, что переход а0→а1 связан с переходом Q1, т.е. Q1 переходит из 0 в1. Следовательно, нужно вырабатывать сигнал J1=1 (K1=0). Кроме этого, на выходе комбинационного узла должны формироваться управляющие сигналы микрокоманды У1: У4, У6. Далее в следующую строку таблицы заносятся данные, соответствующие переходу а1→а0. Из графа переходов выясняется, что переход производит при выполнении условий Х2=1 без выдачи микро-команды. Принцип заполнения строки аналогичен рассмотренному выше. Каждой из дуг графа переходов соответствует отдельная строка. Таким образом заполняется вся таблица.
4.5.Запись логических выражений.
Для каждой строки таблицы записываем логическое выражение в следующей форме: в левой части выражения перечислим переменные, приведённые в графе выходных величин, в правой части – логическое выражение, представленное через текущее состояние аi и значения условий перехода. Для рассматриваемого комбинационного узла получаем следующие выражения:
1) J1; y4; y6 =a0;
2) K1= a1∙ X2;
__
3) J2,K1;y3 = a1∙X2∙X1;
__ __ (4.1)
4) J2,K1 = a1∙ X2∙X1;
- K2, J1; y1, y2, y5,y7 =a2.
Затем определяем логическое выражение каждой выходной величины. Для этого записываем равенство, в левой части которого указываем выходную величину, в правой части – связанные через операцию дизъюнкцию правые части тех выражений I , в которых приведена данная выходная величина
1) J1= a0 + a2;
6
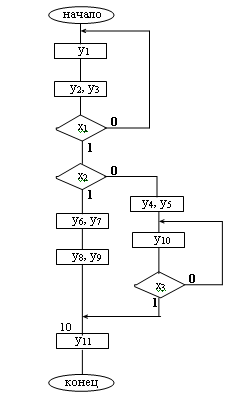
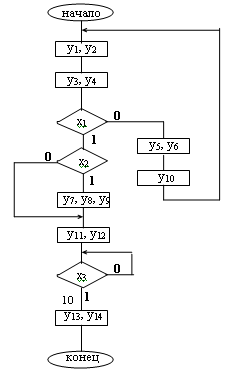
Вариант 18
Построить функциональную схему управляющего автомата Мили для следующей микропрограммы:
27
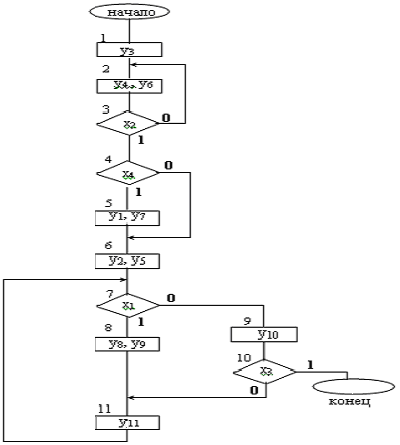
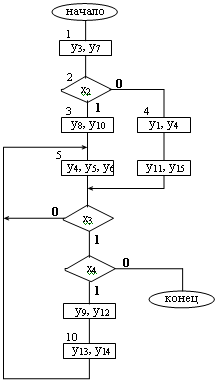
Вариант 17
Построить функциональную схему управляющего автомата Мили
для следующей микропрограммы:

__ __ __ __ __
2) K1= a1∙X2 +a1∙X2∙X1+a1∙X2∙X1 = a1∙X2+a1∙X2(X1+X1) =
__ =a1(X2+X2)=a1;
т.е. К1=а1;
3) J2=a1∙X2∙X1+a1∙X2∙X1=a1∙X2;
4) K2=a2;
5) y4,y6=a0; (4.2)
6) y3=a1∙X2∙X1;
7) y1,y2.y5,y7=a2.
4.6. Построение функциональной схемы комбинационного узла
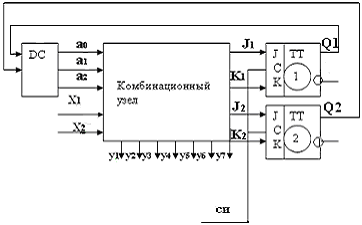
По полученным выражениям строим функциональную схему комбинационного узла. Входящие в выражения значения а0, а1, а2, определяемые комбинацией значений Q2 и Q 1 могут быть получены с помощью дешифратора, как показано на рис.4.3. Схема комбинационного узла рассматриваемого управляющего устройства приведена на рис.4.4.
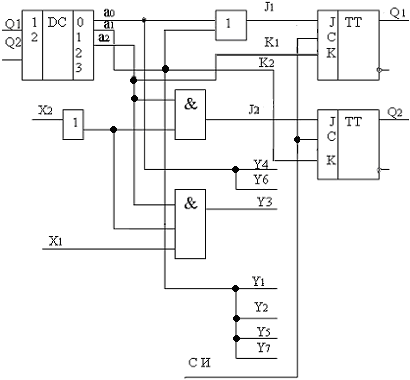
Р и с.4.4. Функциональная схема управляющего устройства
(микропрограммного автомата).
7
Мы рассмотрели реализацию управляющего устройства для выполнения некоторой операции. Очевидно, могут быть построены подобные устройства для управления выполнением других операций. И если в управляющем устройстве процессора предусмотреть такие устройства, то, включая то или иное устройство, можно обеспечить выполнение различных операций на одном и том же оборудовании операционного устройства. Вид операции, подлежащий исполнению в процессоре, будем представлять командой. С помощью дешифратора код команды можно преобразовать в сигналы, производящие включение устройств, которые управляют выполнением соответствующих операций. Приведем структурную схему процессора, программируемого на языке команд.

Р и с.4.5. Структурная схема процессора.
Вопросы к защите курсовой работы
- На какие блоки можно условно разбить вычислительную систему?
- Что такое микрооперация, микрокоманда и микропрограмма?
8
Вариант 16
Построить функциональную схему управляющего автомата Мили
для следующей микропрограммы:
25
Вариант 15
Построить функциональную схему управляющего автомата Мили
для следующей микропрограммы:
24
- Как производится разметка блок- схемы алгоритма в микрокомандах?
- Как строится граф переходов автомата Мили?
- Какими символами помечаются дуги графа переходов автомата Мили?
- Как кодируются состояния автомата Мили?
- Какие устройства используются для представления состояний
микропрограммного автомата?
- Почему необходимо использовать синхронизируемые двух-
тактные триггера или триггера, с динамическим управлением для кодирования состояний?
- С помощью какого устройства выделяются состояния микро-
программного автомата?
- Как заполняется таблица функционирования микропрограм-
много автомата?
- Как определяются логические выражения для построения логического узла?
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
- Угрюмов Е.П. Цифровая схемотехника СПб.: БХВ –Сант-Петербург.
- Калабеков Б.А. Микропроцессоры и их применение в системах и обработке сигналов: Учеб. пособ. для вузов. М.: Радио и связь, 1988. 368 с.
- Баранов С. И.: Синтез микропрограммных автоматов. М.: Радио и связь, 1986. 272с.
9
Приложение
варианты курсовых работ
Вариант 1
Построить функциональную схему управляющего автомата Мили
для следующей микропрограммы:
10
Вариант 14
Построить функциональную схему управляющего автомата Мили
для следующей микропрограммы:
23
Вариант 13
Построить функциональную схему управляющего автомата Мили
для следующей микропрограммы:

22
Вариант 2
Построить функциональную схему управляющего автомата Мили
для следующей микропрограммы
11
Вариант 3
Построить функциональную схему управляющего автомата Мили
для следующей микропрограммы

12
Вариант 12
Построить функциональную схему управляющего автомата Мили
для следующей микропрограммы:
21
Вариант 11
Построить функциональную схему управляющего автомата Мили
для следующей микропрограммы:

20
Вариант 4
Построить функциональную схему управляющего автомата Мили
для следующей микропрограммы:
13
Вариант 5
Построить функциональную схему управляющего автомата Мили
для следующей микропрограммы:

14
Вариант 10
Построить функциональную схему управляющего автомата Мили
для следующей микропрограммы:
19
Вариант 9
Построить функциональную схему управляющего автомата Мили
для следующей микропрограммы:
18
Вариант 6
Построить функциональную схему управляющего автомата Мили
для следующей микропрограммы:
15
Вариант 7
Построить функциональную схему управляющего автомата Мили для следующей микропрограммы:
16
Вариант 8
Построить функциональную схему управляющего автомата Мили
для следующей микропрограммы:

17