
Программа трехмерного проектирования компас 3D. 5 27 сентября 2010. Создание эскизов и деталей методами вращения, выдавливания
| Вид материала | Программа |
Содержание15 ноября 2010 года 22 ноября 2010 года |
- О Конкурса асов компьютерного 3D-моделирования среди предприятий, использующих в проектных, 9.87kb.
- Дипломы победителей и участников Международного конкурса «Будущие асы компьютерного, 15.51kb.
- 1. Классификация деталей типа тел вращения (2 ч.), 72.62kb.
- Программа повышения квалификации дпм 1 «Использование системы трехмерного твердотельного, 36.18kb.
- Динамическое моделирование и прогноз вращения Земли, 95.4kb.
- Совершенствование теории размерного анализа на основе кромочной модели деталей типа, 540.22kb.
- Ученик 9 класса, 703.09kb.
- А. А. Яковлева Рассмотрена на заседании шмс сентября 2010 г. «Утверждаю» сентября 2010, 819.1kb.
- Урок информатики в 11 классе по теме: «Компьютерное моделирование. Программа компас, 53.19kb.
- План-конспект изготовления мягкой игрушки; примерные варианты эскизов Никтошек; виды, 97.06kb.
Справка о занятиях
Применение трехмерного моделирования при разработках в современной технике. Знакомство с CAD/CAM/CAE возможностями программ проектирования. 20 сентября 2010.
На лекции рассматривались возможности современных программ дли моделировании систем начиная от создания трехмерных моделей, выпуском конструкторской документации и заканчивая создание конструкций с помощью станков ЧПУ используя ранее спроектированные детали, а так одно из перспективных направлений современного машиностроения – “выращивание” готовых деталей с помощью 3D принтеров.
Знакомство с пакетами трехмерного моделирования. 23 сентября 2010.
Эта вводная лекция в трехмерное моделирование была посвящена подробному ознакомлению с используемыми в машиностроении современными пакетами моделирования, а так же расчетами на прочностные и гидродинамические нагрузки – КОМПАС 3D, CATIA, UNIGRAPHICS, SolidWorcs, Inventor и Ansys.
Программа трехмерного проектирования - КОМПАС 3D.5 27 сентября 2010.
Создание эскизов и деталей методами вращения, выдавливания.
Практическое занятие 1. Создание силовых деталей для кэзоскелета.
Создание простейших сборок. Использование крепежных элементов и менеджера библиотек при создании 3D сборок. 30 сентября 2010.
Практическое занятие 2. Создание элементов для руки экзоскелета (локоть). 4 октября 2010.
Создание ребер жесткости с использованием метода проецирования и параметризации различных узлов конструкций. 7 октября 2010.
Практическое занятие 1. Создание элементов для руки экзоскелета (предплечье). 11 октября 2010.
Создание параметризированных пространственных кривых и управление ими. Использование для этого различных элементов сборок готовых 3D моделей.
14 октября 2010.
Практическое занятие 1. Создание элементов для руки экзоскелета (палец). 18 октября 2010.
Введение в робототехнику. 21 октября 2010 года
Вводное занятие, на котором рассматривалось значение робототехники в современном машиностроении и повседневной жизни человека, а так же дальнейшие перспективы ее развития. Кроме того, учащимся рассказывалось, чем предстояло им заниматься на протяжении текущего учебного года. Были поставлены задачи, которые необходимо было решить за этот период времени, так же рассматривалось главное направление нашего курса – создание экзоскелета, его аналоги созданные за границей и требования предъявляемые нами к его конструкции.
Знакомство с процессами проектирования конструкций в производстве. Этапы, оборудование и программное обеспечение, применяемое в производстве при создании новых конструкций. 25 октября 2010 года
На данной лекции рассматривались различные процессы проектирования оборудования начиная от создание эскизов, 3D моделей, рабочих чертежей и заканчивая производственными процессами используемых в машиностроении при изготовлении конструкций. Так же рассматривались различные программы трехмерного моделирования, используемые при проектировании различных механизмов.
Рассмотрение основ расчетов на прочности различных конструкций. Способы укрепления компонентов при нагрузках с обеспечением минимальной массы конструкции. 28 октября 2010 года
Были рассмотрены расчеты на прочность нагрузки различных схем – балка, труба, пластина с распределенными и точечными нагружениями. Знакомство с построением эпюр. Выявление потенциально опасных зон и способы их устранения.
Практическое занятие 1. Решение простейших задач по расчетам на прочность нагруженных конструкций. 15 ноября 2010 года
Применение курса (физических основ проектирования оборудования) ФОПО при проектировании различных механизированных узлов. Влияние теплофизических воздействий на работоспособность механических конструкций, а так же ознакомление с основами гидродинамических взаимодействий. 18 ноября 2010 года
На данной лекции рассматривалось тепловое влияние окружающей среды на различные высокоточные посадки, а так же как влияют различные тепловые потоки на динамику расширений деталей.
Практическое занятие 2. Решение простейших задач по расчетам на тепловые влияния среды. 22 ноября 2010 года
Управление роботами. Рассмотрение различных способов управления роботизированными системами. 25 ноября 2010 года
На лекции рассматривались различные способы управления роботизированными системами в частности примененные к конструкции экзоскелета с помощью биопотенциалов, сопротивлений, гироскопов и акселерометров. Рассматривались различные способы передачи сигналов импульсов генерируемых датчиками расположенными на человеке непосредственно какой-либо управляемой конструкции.
Изучение возможностей управления механизмами с помощью современных микроконтроллеров, использования обратных связей для имитации воздействий на объект проектирования. 01 декабря 2010 года
Были рассмотрены принципы работы микроконтроллеров и их использование в конструкции проектируемого экзоскелета, а так же использование обратных связей для управления движениями конструкции (отработка реакции на движение человека в частности точное их повторение).
Отчет о создании руки экзоскелета
За весь период обучения, учащиеся прошли курс трехмерного проектирования начинающийся с разработки аванпроекта и заканчивающийся изготовлением элементов конструкции спроектированной ими конструкции.
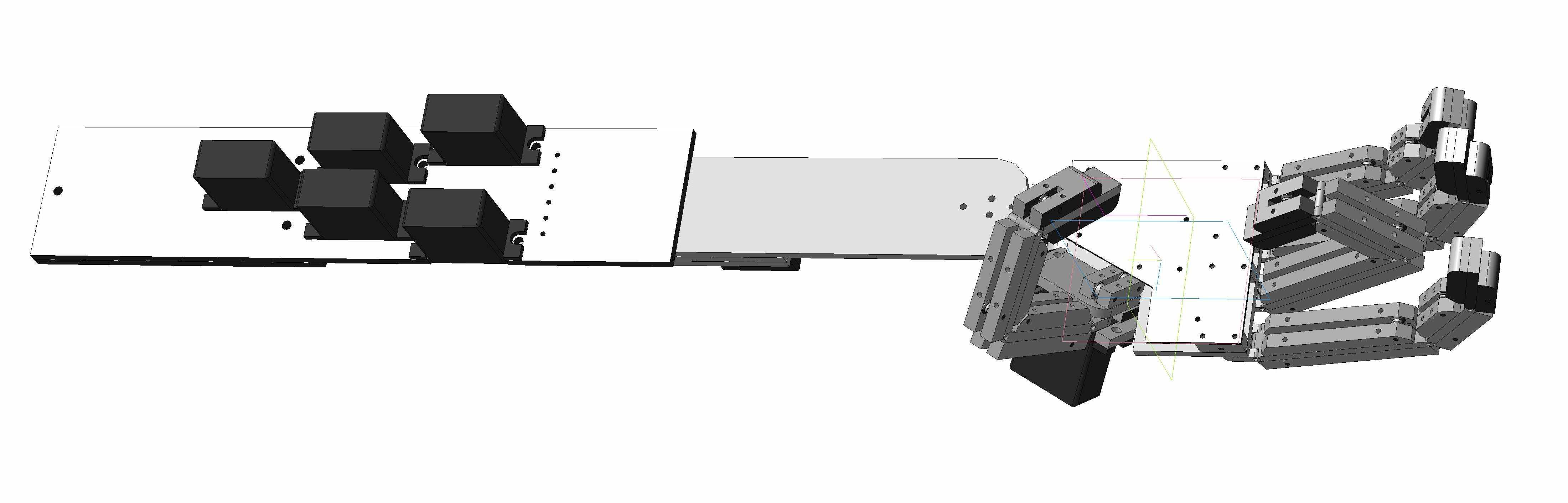
В качестве такого примера был разобран проект создании одной из частей экзоскелета – руки. Основные предъявляемые требованиями к которой, являлись наиболее максимально приближенные габариты к человеческой руке, а так же отработка простейших движений, связанных с захватом кисти и удержания небольшого веса (до двух кг).
После некоторых поисков различных конструкций, было принято решение остановиться на тросовой системе передачи движений с вынесенными на предплечье электродвигателями, что позволило существенно уменьшить габариты механизированной руки экзоскелета.
Пальцы руки имели по три степени свободы, что приближено к аналогу пальцев руки человека, у которых имеется четыре степени свободы. Само крепление пальцев было спроектировано так, что по возможности после проверочной отработки движений кисти на макетной конструкции будет возможность добавление четвертой степени свободы, в следствии чего, кисть экзоскелета будет с довольно большой точностью повторять все малейшие движения кисти человека.
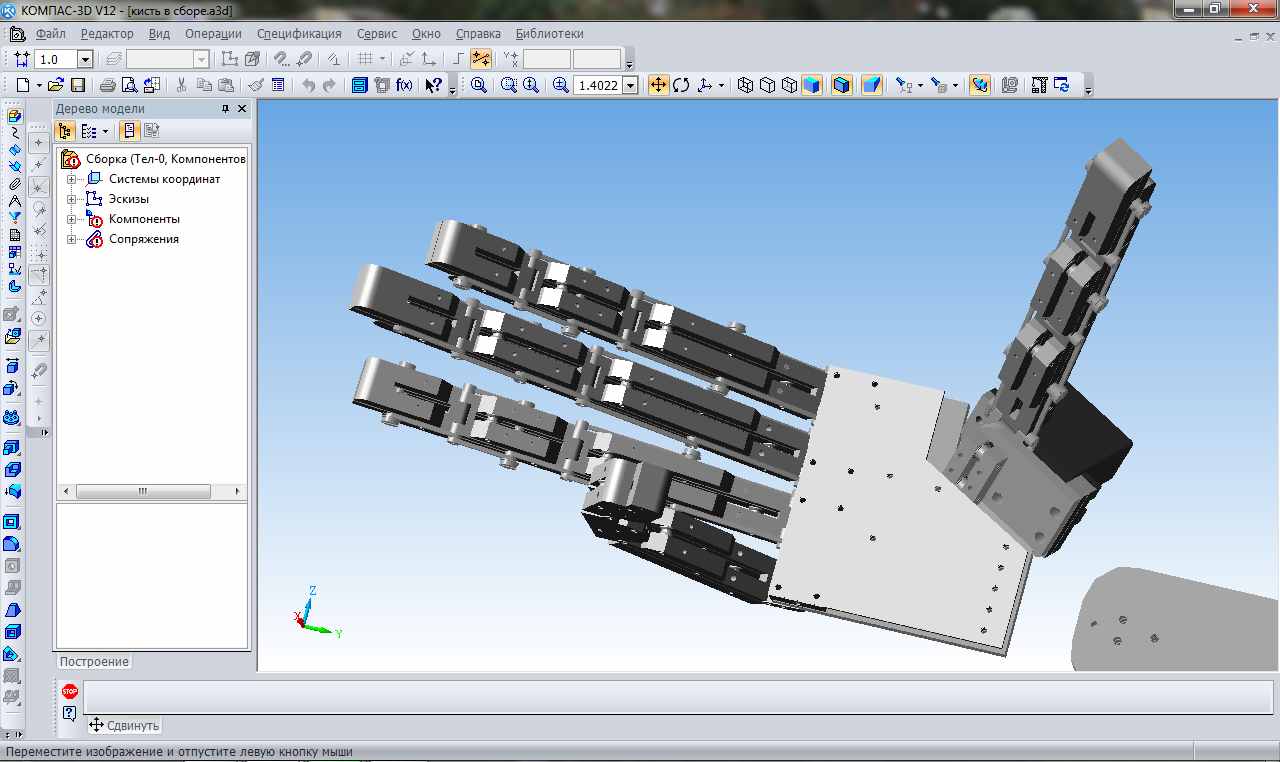
Во время проектирования учащиеся изучили одну из программ трехмерного моделирования – КОМПАС-3D, научившись создавать твердотельные модели (использовались различные методы создания деталей – лофтинг, кинематические и булевы операции, а так же создание пространственных трехмерных деталей, на подобии тросовой проводки), поверхностные конструкции, а так же выпускать параметризированные чертежи и спецификации.
Главным условием, поставленным при проектировании трехмерной конструкции, являлось ее полная параметризация, что позволило создать трехмерную модель элементы которой возможно максимально быстро модернизировать и подгонять к изменяющимся габаритным параметрам.
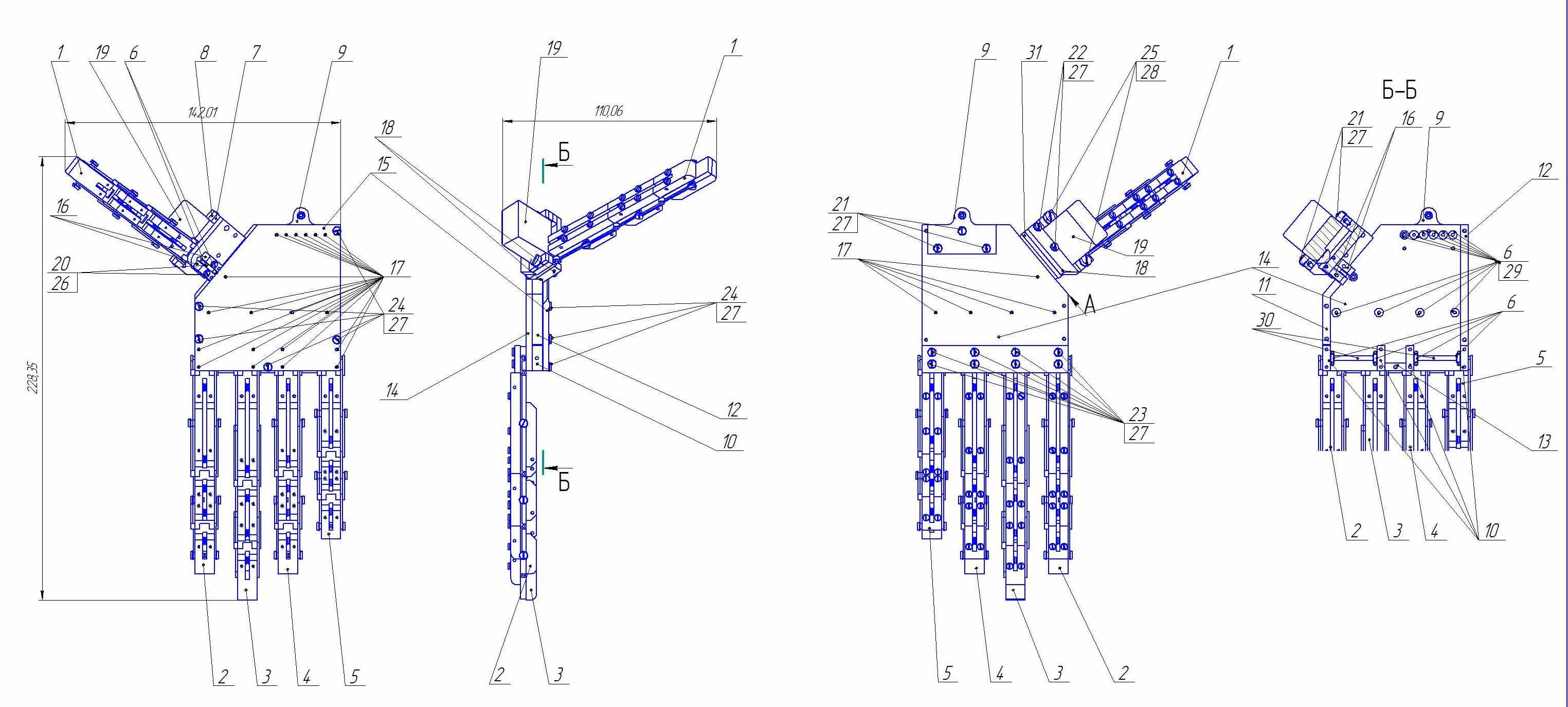
В результате проектирования был сконструирован трехмерный прототип руки экзоскелета, а так же выпущена конструкторская документация на все его входящие элементы, по этим чертежам была создана часть конструкции кисти, на которой проверялись принципы движения будущей руки. По результатам испытаний было принято непосредственное решение создание рабочего прототипа руки экзоскелета с его небольшой доработкой.
Список школьников в кружке:
Бабкин Юрий Алексеевич
Баронин Артем Андреевич
Бурдукова Александра Вячеславовна
Васин Иван Сергеевич
Гавриленко Анна Денисовна
Гербер Евгений Александрович
Горельченкова Марина Владимировна
Евдокимов Иван Алексеевич
Зайцева Анна Григорьевна
Кравченко Алексей Геннадьевич
Перова Анна Александровна
Чернышев Дмитрий Вадимович
Чумаченко Евгения Григорьевна
Чуприна Евгения Андреевна