
Контрольный тест и общее условие обнаружения неисправности. Рентгенотелевизионный метод неразрушающего контроля (n-k) (рентгеноскопия и рентгенография)
| Вид материала | Документы |
- Контрольный тест 50 вопросов Самостоятельная работа, 23.52kb.
- Аннотация дисциплины «методы неразрушающего контроля», 12.16kb.
- Контрольный тест 30 вопросов, 48.7kb.
- 1. основные положения, 349.47kb.
- Тест № Волокнистые материалы. 2 Тест № Технология получения тканей. 4 Тест № Строение,, 180.5kb.
- Предложен метод неразрушающего акустического контроля многофазных макрооднородных композитных, 14.58kb.
- Технологический институт энергетических обследований, диагностики и неразрушающего, 149.15kb.
- Основная информация и области применения, 22.43kb.
- Методы контроля и управления железнодорожными станционными переездами коваленко, 21.35kb.
- Программное обеспечение приборов неразрушающего контроля, реализующих метод вихревых, 101.12kb.
1. Рентгенотелевизионный метод неразрушающего контроля (N-K) (рентгеноскопия и рентгенография).
2. Контроль и качество эл. соединений.
3. Теоретические множественные модели.
4. Графоаналитический метод описания ЦФУ.
5. d-алгоритм, 2-я фаза. Доопределение, суть операции.
6. Оператор d-пересечения, d-пересечение про наличии неисправности.
7. Основные понятия при построении контрольного теста при условии проверки ЦФУ на xj(r)=0(1) общее условие.
8. Контрольные тесты. Алгоритмы. Комбинационный многовыходовый элемент.
9. d-алгоритм. Алгоритм активизации путей при составлении тест. куба. Критерии.
10. d-алгоритм. Виды покрытий.
11. Операция d-пересечения. D-пересечение при наличии "лямбда".
12. Методы контроля по виду стимуляции (классификация).
13. d-пересечение при наличии "мю".
14. Классификация методов неразрушающего контроля.
15.Закон Вина, Закон Планка, закон Стефана-Больцмана.
16. Виды d-алгоритмов. Получение d-алгоритма.
17. d-пересечени\е 2х элементов(последняя лекция).
18. Метод радиоволновый.( ключевые слова - поглощение, отражение, прохождение).
19. Доопределение.
20. Контроль на этапах проектирования
21. D-алгоритм. Реализация 1-ой части.
22.Контрольный тест и общее условие обнаружения неисправности.
1. Рентгенотелевизионный метод неразрушающего контроля (N-K) (рентгеноскопия и рентгенография).
Рентгеноскопия— метод рентгенологического исследования, при котором изображение объекта получают на светящемся (флюоресцентном) экране.
Этот метод характеризуется получением проекции полного участка исследуемого объекта на рентгеночувствительный приёмник (пленка или матрица) размера близкого к размеру участка.
В этом методе можно выделить:
Однострочный сканирующий метод
Многострочный сканирующий метод
Рентгеногра́фия— исследование внутренней структуры объектов, которые проецируются при помощи рентгеновских лучей на специальную плёнку или бумагу. Наиболее часто термин относится к медицинскому неинвазивному исследованию, основанному на получении суммационного проекционного изображения анатомических структур организма посредством прохождения через них рентгеновских лучей и регистрации степени ослабления рентгеновского излучения.
 При диагностической рентгенографии необходимо проведение снимков не менее, чем в двух проекциях. Это связано с тем что рентгенограмма представляет собой плоское изображение трёхмерного объекта. И как следствие локализацию обнаруженного патологического очага можно установить только с помощью 2 проекций.
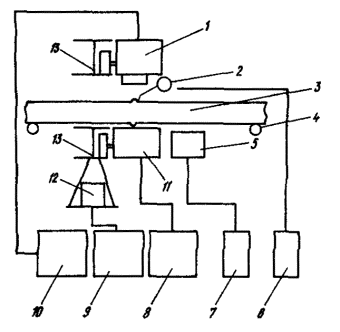
При диагностической рентгенографии необходимо проведение снимков не менее, чем в двух проекциях. Это связано с тем что рентгенограмма представляет собой плоское изображение трёхмерного объекта. И как следствие локализацию обнаруженного патологического очага можно установить только с помощью 2 проекций.1 - источник излучения; 2 - дефектоотметчик; 3 - контролируемое соединение; 4 - ролики рольганга; 5 - привод рольганга; 6 - пульт управления дефектоотметчика; 7 - пульт управления рольганга; 8 - видеоконтрольное устройство; 9 - пульт управления механизма перемещения; 10 - пульт управления рентгеновского аппарата; 11 - преобразователь радиационного изображения; 12 - привод механизма перемещения; 13 - механизм перемещения.
Рентгенотелевизионные системы оснащаются рентгеновским аппаратом, манипулятором для перемещения объекта контроля, системой визуализации, программным обеспечением для получения и расшифровки рентгеновского снимка.
Классический метод контроля, подразумевает контроль объекта в статике, с большими трудозатратами и незначительной производительностью.
2. Контроль и качество эл. соединений.
Контроль качества электрических соединений.
Проводится входной контроль провода на соответствие технических характеристик государственным стандартам.
Специалистами ИЗТТ проводится 100 % визуальный осмотр и механический контроль каждого электрического соединения работниками ОТК на наличие внешних повреждений проводов, контактов и изоляционных материалов, качество монтажа кабельных наконечников, что позволяет исключить возможность выхода из строя приборов из-за некачественных электрических соединений.
3. Теоретические множественные модели.
4. Графоаналитический метод описания ЦФУ.
5. d-алгоритм, 2-я фаза. Доопределение, суть операции.
При решении задачи диагностирования будет использовалься метод, концепция которого заключается в следующем:
Задается неисправность и одновременно происходит активизация всех возможных путей от места неисправности к выходу исследуемого узла. Такой подход позволяет считать этот метод алгоритмом. Он и получил название «d-алгоритм» ( в лит-ре это 1-й метод генерирования тестов для комбинационный ЦУ).
Сущность метода:
Основная идея d-алгоритма состоит:
1)исх. информация СХЭ – математическая модель узла
2)задается неисправность(выбирается).
На языке вх/вых неисправностей элементарно логическго элемента – генерируются и активизируются все возможные пути от места неисправности к выходам одновременно.
На каждом шаге – проверка на запрет, обусловленный схождением разветвлений и отказ от этих путей, где происходит схождение/разветвление.
Записанное является первой фазой решения задач. 1-я фаза – d-проход.
2-я фаза заключается в транспортирвании полученных сигналов на выходе ко входу с целью получения первичного вх. набора, который реализовывал бы результаты 1й фазы.
2-я фаза называется операцией доопределения
6. Оператор d-пересечения, d-пересечение про наличии неисправности.
7. Основные понятия при построении контрольного теста при условии проверки ЦФУ на xj(r)=0(1) общее условие.
При решении задачи контроля будем исследовать цифровой узел на наличие неисправностей типа «0» и «1».
Если неисправность есть на выходе элементарного логического элемента, то представляем ее как Si – 0(1).
Неисправность может быть на входах логического элемента, то представляем ее как Si,j – 0(1); j – вход i-ого логического элемента.
Условия проверки буквы xjr0(1) на наборе “е”: fxjr0(1)(e)f(e)
Последовательность проверки:
Проверяем исследуемый узел на наличие неисправности xjr0. В модели выделить терм, содержащий проверяемую букву. Установить в терме все буквы = 1. В остальных термах хотя бы одну букву установить равной 0. Значения буквы, установленные ранее не менять. С учетом сказанного и при наличии неисправностей получаем:
f(e)=1; fxjr0(e)=0; f(e)fxjr0(e)
- Проверяем ту же букву на «1». (xjr1). В выбранной модели выделяем терм, содержащий данную букву. Устанавливаем исследуемую букву = 0. Все остальные буквы данного терма устанавливаются = 1. В остальных термах хотя бы одна буква устанавливается = 0. Тогда при наличии неисправностей имеем:
f(e)=0; fxjr1(e)=1; f(e)fxjr1(e)
- При одном и том же входном наборе может быть проверено несколько букв. При составлении теста каждая буква в каждой терме обводится кружком на том наборе, где ее впервые проверяют.
8. Контрольные тесты. Алгоритмы. Комбинационный многовыходовый элемент.
9. d-алгоритм. Алгоритм активизации путей при составлении тест. куба. Критерии.
Если использовать терминологию метода d-алгоритма, то активизация – активиз. путей.
Алгоритм решения задач(акт.пути)
1)выбор исследуемого схэ
2) построение вырожденного покрытия элэ входящее в иссл. элэ на языке вх и вых исследуемого элэ
3) построить модели для элэ в виде d-кубов
4) выбрать d-кубы для активизации входов элэ
5) провести d-пересечение по определенным правилам
Если хотим получить d-куб для активизации путей необходимо провести d-пересеченеи для кубов, входные клеммы которого активны.
10. d-алгоритм. Виды покрытий.
11. Операция d-пересечения. D-пересечение при наличии "лямбда".
12. Методы контроля по виду стимуляции (классификация).
По видам стимуляции и получения оценки реакции проверяемого узла ЭВС выделяют след. Методы тестирования(тестовый контроль диагностирования)
- Тестирование с хранимой программой.
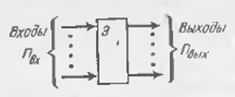
Функциональная схема имеет вид:
ОЗУ
ОЗУ


4
1
2
3



1-генератор тестовых воздействий
2- контролируемый узел ЭВС
3- анализатор(в соответствии с эталонными значениями)
4-результат контроля диагностирования ( на выходе)
Краткая характеристика:
ГТВ выдает набор тестов, тесты разрабатываются заранее. Они могут храниться в ОЗУ.
Анализатор сравнивает полученные сигналы с эталонными(показатели качества). Они м.б. получены заранее и храниться в ОЗУ.
- Вероятностное тестирование.
Функциональная схема имеет вид:
1
2
3
4 - Генератор псевдослучайных воздействий
- Функциональный узел ЭВС
- Анализатор (сравнивает численно-вероятностные характеристики(ЧВХ)) В качестве эталона используюся ЧВХ, рассчитанные ранее( σ, M). Сравнение происходит с реально полученными ЧВХ
- Контроль с использованием сравнения с эталоном (компактное тестирование)
Суть метода: эталонный функциональный узел физически присутствует в системе контроля и стимулы подаются одновременно на исследуемый и эталонный узел.
С
2
труктурная схема:
1
2'
3





- Генератор воздействий (т.к. м.б. ген. тестовых сигналов и случайных воздействий)
2- эталон
2’ – исследуемый узел
3 – анализатор(для сравнения сигналов, полученных с эталона и реального исследуемого узла)
Данный способ реализации имеет бОльший уровень достоверности.
- Сигнатурное тестирование.
Суть метода: выходные сигналы с исследуемого узла, получаемые за фиксированный интервал времени обрабатываются на регистре сдвига с обратными связями(сигнатурный анализатор), перекодируются(сжимаются) в короткие коды(сигнатуры). Полученные сигнатуры сравниваются с эталонами.
1
2
3
Структурная схема: 4
- Генератор воздействий
- Исследуемый ФУ ЭВС
- Сигнатурный анализатор
- Поэлементное диагностирование
Предполагается осуществление электрического контакта с ЭРЭ или ИМС исследуемого узла работоспособность каждого компонента проверяется индивидуально; проверяемый компонент при этом как бы изолируется от всех остальных. Целостность узла не нарушается. Метод эффективный, но сложный.
13. d-пересечение при наличии "мю".
14. Классификация методов неразрушающего контроля.
Неразрушающий контроль (НК) — контроль надежности и основных рабочих свойств и параметров объекта или отдельных его элементов/узлов, не требующий выведение объекта из работы либо его демонтажа.
Основными методами неразрушающего контроля являются:
магнитный;
электрический;
вихретоковый;
акустический;
радиационный;
тепловой;
радиоволновой;
оптический;
проникающими веществами.
Методы каждого вида неразрушающего контроля классифицируются по следующим признакам:
а) характеру взаимодействия физических полей или веществ с контролируемым объектом;
б) первичным информативным параметрам;
в) способам получения первичной информации.
The same from GOST:
МЕТОДЫ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ классифицируются по следующим видам:
-По характеру взаимодействия физических полей или вешеств с контролируемым объектом .
- По первичному информативному параметру.
-По способу получения первичной информации
• радиационный
Радиационный контроль используется наиболее редко, но позволяет контролировать большие толщины материалов, многие материалы, контроль которых остальными методами затруднен (например, композиты).
• радиоволновой
• акустический (ультразвук)
Частое применение акустического контроля обусловлено следующими достоинствами: возможность контроля внутренних дефектов, относительная простота аппаратуры, широкий спектр материалов пригодных для контроля.
• электромагнитный (исп комбинация электрического и магнитного полей)
• вихретоковый (контроль потерь мощности)
• капиллярный (капиллярная дефектоскопия)
• визуально-оптический (исп. оптические устройства, микроскопы)
• тепловой (термография, исп. термопары, фотоприемники, ЖКИ)
• проникающими веществами
Наиболее простым в исполнении выглядит контроль поверхностных дефектов размерами от 0,3 до 1 мкм проникающими веществами.
15.Закон Вина, Закон Планка, закон Стефана-Больцмана.
Вина закон излучения, закон распределения энергии в спектре равновесного излучения (излучения абсолютно чёрного тела) в зависимости от температуры. Этот закон теоретически выведен В. Вином (1893). Согласно В. з. и., плотность энергии излучения uv, соответствующая частоте излучения v, зависит от v и абсолютной температуры Т следующим образом:
uv = v3 f (v/T),
где f — некоторая функция отношения v/T. Из этого закона можно получить Вина закон смещения. В 1896 Вин получил для uv следующую зависимость:

(c1 и c2 — постоянные коэффициенты). Этот закон представляет собой предельный случай Планка закона излучения и справедлив при больших частотах излучения (малых длинах волн).
Формула Планка — выражение для спектральной плотности мощности излучения абсолютно чёрного тела, которое было получено Максом Планком. Для плотности энергии излучения u(ω,T):

Формула Планка была получена после того, как стало ясно, что формула Рэлея — Джинса удовлетворительно описывает излучение только в области длинных волн. Для вывода формулы Планк в 1900 году сделал предположение о том, что электромагнитное излучение испускается в виде отдельных порций энергии (квантов), величина которых связана с частотой излучения выражением:

Коэффициент пропорциональности впоследствии назвали постоянной Планка, = 1.054 · 10−27 эрг·с.
законы равновесного излучения. Интегрирование по ν (или λ) от 0 до ∞ даёт значения полной объёмной плотности излучения по всем частотам — Стефана - Больцмана закон излучения:
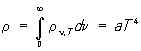
, где

16. Виды d-алгоритмов. Получение d-алгоритма.
d-алгоритм предполагает, что тестовое воздействие (входной набор) определяется отдельно для каждой неисправности. Совокупность полученных наборов образует тест для всего множества допустимых неисправностей.
В d-алгоритме можно выделить следующие три основные операции построения тестового набора для проверки заданной неисправности.
1. Выбирается d-куб заданной неисправности.
2. Активизируются возможные пути от элемента с выбранной неисправностью к контролируемому выходу. При этом применяется операция пересечения d-куба неисправности с d-кубами всех элементов путей от неисправности до выхода схемы (прямая фаза d-алгоритма).
3. Выполняется пересечение полученного в п. 2 d-куба с сингулярными кубами остальных элементов с целью обеспечения условий активизации, заданных этим d-кубом (обратная фаза d-алгоритма).
17. d-пересечение 2х элементов(последняя лекция).
18. Метод радиоволновый.( ключевые слова - поглощение, отражение, прохождение).
19. Доопределение.
20. Контроль на этапах проектирования
В зависимости от этапа разработки изделия различают:
1.поиск неисправностей(дефекта) – поиск причины, вызвавшей несоответствие выходных (промежуточных) пар-ров ПК требованиям ТУ.
Этот процесс справедлив для любого этапа производства, эксплуатации ЭВС.
2. Отладка. Это процесс поиска неисправностей в функциональных узлах ЭВС или программе на этапе разработки макетного образца.
Процесс справедлив для эскизного и технического объектов.
3.Наладка. Процесс поиска неисправностей в функц. узлах изделий ЭВС во время подготовки этих изделий к сдаче после сборки. По отношению к данному процессу можно говорить, что он используется(применяется) на этапе опытного образца.
(Не смотря на внешнее сходство неисправности носят специфический характер и хар-ся для данного этапа)
Отладка связана в основном с выявлением и устранением ошибок и дефектов разработчика и (или) конструктора. На этом процесс допускает мену типов ЭРЭ.
Наладка связана с устранением технологических дефектов после сборки и монтажа изделий. В соответствии с классификацией отказов в уравлении качеством отказы(в процессе отладки) класс-ся как схемотехнические и конструкторские ошибки.
Дефекты процесса наладки. – производственные ошибки.
4.Диагностирование. Процесс поиска неисправностей в изделиях ЭВС(функ.узлы) в прцессе эксплуатации. (диагностирование связано с появл. отказов в процессе экспл.)
П.с. ЭРЭ можно заменить на этапе устранения дефектов.(на этапе отладки, если допущена ошибка)
21. D-алгоритм. Реализация 1-ой части.
22.Контрольный тест и общее условие обнаружения неисправности.
Тестовый контроль применяется для контроля всех без исключения ЦУ ЭВС и считается универсальным, т.к. этот вид контроля справедлив для ЦУ(узлов) не зависимо от их функционального назначения.
Тестовый контроль предполагает:
1)построение контролирующих тестов.
2)построение диагностирующих тестов
3)контроль и поиск неисправностей с использованием тестов.
Контролирующий (диагностический) тест Т называют тупиковым контролирующим (диагностическим), если любой тест не является контролирующим (диагностическим).
Очевидно, что при проведении диагностирования желательно иметь тесты как можно меньшей длины. Это сокращает время диагностирования и объем необходимого информационного обеспечения.
Задача построения теста одна из главных и наиболее сложных в технической диагностике. Как правило, современные системы автоматизации проектирования электронных устройств имеют специальные подсистемы построения тестов.
Процесс вычисления тестов в общем случае состоит из следующих этапов:
1) определение списка допустимых неисправностей;
2) вычисление тестового набора для очередной неисправности из списка;
3) моделирование схемы на тестовом наборе для выявления подмножества обнаруживаемых неисправностей;
4) определение полноты проверки схемы на построенном тесте.
Различают методы случайного и детерминированного формирования тестов. В настоящее время методы случайного выбора тестовых наборов практически не используются.
В связи с высокой сложностью и трудоемкостью процесса построения тестов широко применяются интерактивные системы построения тестов, которые предполагают активное участие человека в этом процессе.
При изучении методологии построения тестов в качестве ОД выберем цифровые объекты, так как в теории технической диагностики наиболее глубоко проработаны задачи построения тестов для цифровых схем.
Из всего многообразия методов детерминированной генерации теста (то есть не использующих методику случайного выбора тестовых наборов) рассмотрим основные: с использованием ТН, метод активизации одномерного пути, d-алгоритм, метод булевой производной, метод ЭНФ. Последние четыре метода излагаются относительно комбинационных схем.
Заметим, что для схем с микропроцессорами получили развитие специальные подходы и методы, которые будут рассмотрены позднее.
23. Оценка тестопригодности
Виды оценки тестопригодности:
• Управляемость (оценка обеспечения на входах схемы ЭС значений, необходимых для обнаружения неисправностей)
Может быть от 0 до 1. Максимальное значение 1 на входе схемы. Значение 0 там. где невозможно установить логическое состояние, например, заземленный вход.
Значение управляемости на выходах данной схемы зависит от значения управляемости на входах, которое не всегда равно 1.
Yвых=Ky f(Yвх)
Кy - коэффициент передачи управляемости элемента, связанный с этим выходом.
f - зависит от значений управляемости всех входов.
• Наблюдаемость (оценка наблюдения реакции схемы на данную неисправность на ее выходах).
Наблюдаемость входа 1, и оа уменьшается по мере продвижения сигналов вдоль активизированного пути.
Коэффициент передачи наблюдаемости Kn - количественная мера, характеризующая уменьшение значения наблюдаемости элемента по мере продвижения к выходу вдоль активизированного пути при условии, что другие элементы схемы управляемы.
Нвых=Kn Нвх g(Увх)
Тестопригодность: Т=НУ
Общий показатель тестопригодности для всей ЭС определяется как мера средей трудоемкости получения теста для каждого элемента, а следовательно, эта мера является средним арифметическим значением тестопригодности всех элементов ЭС:
TЭС=(T)N где N-число элментов ЭС.
В ДОПОЛНЕНИИ( найти место в ответах/распределить)
1. D-алгоритм
D-алгоритм является дальнейшим развитием концепции активизации путей проверяемой схемы. В отличие от метода одномерной активизации данный алгоритм основан на возможности одновременной активизации всевозможных путей ( как одномерных так и многомерных ) от места возникновения неисправности ко всем выходам схемы. Формальное описание алгоритма базируется на D-исчислении - модифицированном кубическом исчислении булевых функций.
1.1 D-исчисление
D - исчисление представляет собой р - исчисление, дополненное следующими понятиями и определениями.
D - куб . Это определенное над опорными координатами вентиля либо схемы множество, состоящее из элементов {0,1,х,d,d'} и составленное таким образом, чтобы хотя бы одной входной и одной выходной координатам соответствовал символ d либо d`. Символы d, d` могут принимать значения из множества {0,1}. D-куб имеет кратность k ( будем также называть такой его n-мерным кубом) , если символы d либо d' соответствуют k входным координатам. D - куб кратности 1 называется простым . Формально построение d-куба сводится к попарному пересечению кубов из единичного и нулевого вырожденных покрытий по следующим соотношениям:
0 0 = 0 х = 0 ,
1 1 = 1 х = 1 ,
х х = х ,
1 0 = d ,
0 1 = d`.
Например, для элемента 2 ИЛИ d-кубы можно построить следующим образом:
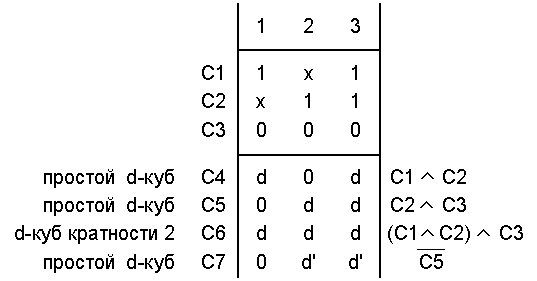
Два d-куба, один из которых получен из другого путем замены всех символов d на d` или наоборот без изменения остальных символов, являются равносильными и называются эквивалентными.
Физическая интерпретация d - куба. В простом d-кубе отражается факт управляемости выхода вентиля от одного входа; в кратном кубе выходом управляют одновременно несколько входов.
D - куб неисправности. Это понятие используется для выражения теста неисправности вентиля либо схемы вцелом через входные и выходные координаты. D - куб неисправности состоит из входного набора (локального теста) и символов d, d' на выходных координатах. Локальный тест строится над входными координатами вентиля таким образом, чтобы под его воздействием неисправность проявлялась (наблюдалась) на выходе вентиля ( схемы ). Символ d говорит о том, что элемент ( схема ) в исправном состоянии на выходе должен иметь 1, в неисправном - 0; для символа d' - наоборот. Различают примитивный и сложный d-кубы неисправности вентиля и d-куб неисправности схемы. Примитивный d - куб строится над координатами одного вентиля, сложный
d - куб - над координатами нескольких вентилей. D - к у б неисправности схемы задается над входными и выходными координатами схемы. Например, для неисправности =0 на выходе элемента 2 ИЛИ примитивный d-куб неисправности вентиля
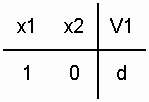
говорит о том, что при подаче теста {1,х} на входы вентиля на его выходе в исправном состоянии должна быть 1, а в неисправном - 0. При построении D-куба неисправности необходимо придерживаться следующих рекомендаций: - если KТ, в которой моделируется неисправность, является внешним входом схемы, то D-куб неисправности составляется относительно одного или нескольких вентилей, которые питает данный вход, в зависимости от того какой путь (одномерный или многомерный) будет активизироваться. Так, например, для приводимого ниже фрагмента схемы D-куб неисправности х1=1 при попытке активизации
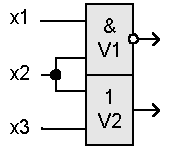
одномерного пути {x2,V1,...} необходимо составлять относительно одного вентиля - V1:
Если же требуется активизировать многомерный путь
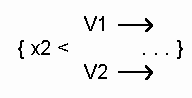
то D-куб неисправности должен быть построен относительно вентилей V1 и V2:

При моделировании неисправности на непосредственном входе (выходе) элемента схемы D-куб неисправности составляется относительно вентиля, которому принадлежит рассматриваемый вход, вне зависимости от того, кто питает этот вход ( выход другого элемента или внешний вход схемы ) и имеются ли ответвления в цепи данной КТ. Например, D-кубы неисправностей V1.вх2=1, V1.вых=0 в приведенном выше фрагменте схемы строятся относительно вентиля V1:

D-куб неисправности на внешнем выходе схемы строится от- носительно вентиля, выход которого является выходом схемы.
D - пересечение. Эта операция выражает формализм активизации пути от места возникновения неисправности до выходов схемы. Этим обеспечивается наблюдаемость неисправности. Операция обозначается как "" и определяется над d-кубами на основе следующих соотношений:

Рассмотрим пример d-пересечения кубов:
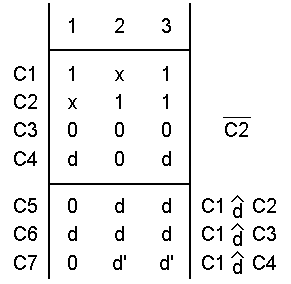 Правило d-пересечения кубов. Куб, являющийся результатом d-пересечения двух d-кубов неопределен, если он содержит символы y, p либо одновременно встречаются символы j и m. Если в кубе имеются символы j, но не m, то вместо пересечения АВ необходимо выполнить А~В. В случае наличия символов m пересечение производить по соотношениям:
Правило d-пересечения кубов. Куб, являющийся результатом d-пересечения двух d-кубов неопределен, если он содержит символы y, p либо одновременно встречаются символы j и m. Если в кубе имеются символы j, но не m, то вместо пересечения АВ необходимо выполнить А~В. В случае наличия символов m пересечение производить по соотношениям: 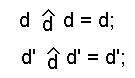
1.2 Тестирование КЛС по D-алгоритму
Синтез теста конкретной неисправности производится по следующему алгоритму.
Алгоритм D1. (Алгоритм тестирования отдельной неисправности k=h на базе D-исчисления).
1. Относительно выбранного вентиля составляется D-куб Сh0 заданной неисправности.
2. Описываются всевозможные пути L = {li}, порождаемые Кт k.
3. D - проход (D-продвижение, прямая фаза(1-я)). Из списка L выбирается путь li (одномерный или многомерный и выполняется его активизация путем последовательного D-пересечения куба Сh0 с D-кубами вентилей, лежащих на пути li. При этом на каждом шаге символ d либо d' "продвигается" по данному пути на выход очередного вентиля. Эта заканчивается по получении на выходной координате символа d либо d'.В результате на некотором n-шаге получаем D-куб неисправности схемы D"(li) с неопределенными выходными координатами вентилей.
4. Доопределение (обратная фаза(2-я)). Этап предназначен для установки (доопределения) требуемых выходных значений куба D"(li), которые после d-прохода не обязательно обеспечены соответствующими входными значениями. Доопределение выполняется на основе операции D-пересечения куба D"(li) с соответствующими сингулярными кубами вырожденных покрытий вентилей. Если же какую-либо из координат не удается доопределить, т. е. всевозможные варианты пере- сечений образуют пустые либо неопределенные кубы,то активизация пути li прекращается, путь вычеркивается из списка L и производится переход на п.3 данного алгоритма. При этом, если список L окажется пустым, то это говорит о том, что ни один из путей, порождаемых КТ k, не активизируется и теста данной неисправности не существует. В этом случае она объявляется несущественной, и алгоритм прекращается. В случае же успешного доопределения получаем D-куб неисправности схемы D(li).
5. Составление теста . Искомый тест t(k=h) составляется по входным координатам куба D(li).
Метод активизации одномерного пути
Этот метод является одним из исторически первых структурных подходов к построению тестов. Основная идея метода заключается в построении пути от места неисправности, например, от некоторого элемента Di через последовательность некоторых элементов D2,..., DN до одного из внешних контролируемых выходов объекта. Входные сигналы элементов D2,..., DN выбираются таким образом, чтобы по значению сигнала на выбранном внешнем выходе можно было судить о состоянии элемента Di.
При этом на входы неисправного элемента Di необходимо подать сигналы, при которых неисправность проявляется на его выходе. Создаваемый вышеуказанным образом путь называют активизированным, что и определило название метода.
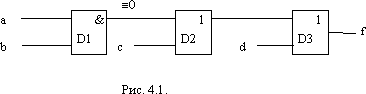
Пусть в цифровой схеме рис. 4.1 имеется неисправность, эквивалентная фиксации выхода элемента D1 в значении "лог. 0". Чтобы активизировать путь от D1 до выхода f надо подать c=0 и d=0. Для проявления неисправности по выходу элемента D1 надо подать а=b=1.
Процедуры формирования тестового воздействия для проверки некоторой неисправности можно сформулировать в виде следующих операций.
1. Определяем условие, при котором заданная неисправность проявляется в месте ее возникновения.
2. Выбираем последовательность элементов (путь), через которые неисправность будет транспортироваться до контролируемого выхода.
3. Определяем условие активности выбранного пути. При этом для каждого элемента пути задаем входные сигналы таким образом, чтобы его выход зависел от выходного сигнала предыдущего элемента пути.
4. Определяем комбинацию значений входных сигналов схемы, при которых неисправность проявляется в месте ее возникновения и транспортируется на контролируемый выход схемы.
Пункты 1-3 приведенного алгоритма часто называют прямой фазой метода активизации одномерного пути, а п. 4 – обратной фазой. Чтобы построить тест для устройства в целом, данный алгоритм применяется последовательно для каждой неисправности из множества допустимых. Тест устройства представляет собой последовательность тестовых наборов, полученных для каждой неисправности.
На рис. 4.2 показаны значения сигналов на линиях схемы в результате выполнения рассмотренного алгоритма для неисправности "линия i = 0“. В процессе выполнения “прямой фазы” алгоритма линиям присваиваются значения: a = 1, b = 1, k = 0, e = 1. В ”обратной фазе” алгоритма надо определить значения c и d, при которых k =0. Это значения: c =0, d =0 (можно выбрать и другую комбинацию значений, обеспечивающих k = 0).
Согласно этих значений заданную неисправность проверяет тестовый набор
a b c d e
1 1 0 0 1
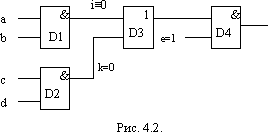
Метод прост и удобен для ручного использования, однако возможны неисправности, для проверки которых необходимо активизировать несколько путей. Обычно это следствие наличия сходящихся разветвлений. На рис. 4.3 приведена схема, в которой для проверки неисправности =1 на выходе элемента D1” необходимо активизировать два пути: через элементы D2, D4 и через элемент D3, D4.
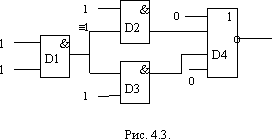
Наиболее популярной формальной реализацией структурного подхода к построению тестов, при которой обеспечивается активизация множества путей, является d-алгоритм.
Построение теста по методу булевой производной
Булевой производной функции f(x) = f(x1, x2,..., xn) по xi называется функция df(x) / dxi = f(x1, x2,..., xi,..., xn) Å f(x1, x2,...
 ,,..., xn), где Å – сумма по модулю 2.
,,..., xn), где Å – сумма по модулю 2.Булева производная может быть также вычислена и по следующей формуле:
df(x) / dxi = f(x1, x2,..., 0,..., xn) Å f(x1, x2,..., 1,..., xn).
Булева производная определяет значения логических переменных x1,..., xn (кроме xi), при которых изменение состояния xi приводит к изменению значения функции f(x).
Тест для неисправности xi = 0 (хi = 1) определяют значения логических переменных, при которых
xi × df(x) / dxi = 1 (`xi × df(x) / dxi =1).
Сказанное можно распространить и на внутренние переменные. Тест для неисправностей z =0 (z =1) внутренней линии схемы определяют значения логических переменных, при которых
z× df(x) / dz =1 (
 × df(x) / dz = 1).
× df(x) / dz = 1). Таким образом, входное воздействие для проверки неисправности в точке z определяется следующим образом.
1. Составляем функцию f(x), в которой в качестве переменной присутствует z.
2. Определяем частную булеву производную df(x) / dz, приводим полученное выражение к дизъюнктивной форме (ДФ).
3. Выбираем один из термов (например, t), полученной в п. 2 ДФ.
4. Неисправность z = 0 проверяется на воздействии, при котором значения переменных x1,..., xn обеспечивают условие z× t = 1.
5. Неисправность z = 1 проверяется на воздействии, при котором значения переменных x1,..., xn обеспечивают условие `z× t = 1.
Приведем несколько примеров вычисления тестов методом булевой производной.