Методические указания к лабораторной работе по курсу Компьютерный анализ электронных схем
| Вид материала | Методические указания |
- Методические указания к лабораторной работе по курсу «Информатика» для студентов всех, 254.72kb.
- Методические указания к лабораторной работе по курсу «Информатика» Основы алгоритмизации, 441.82kb.
- Методические указания к лабораторной работе по курсу «Механизация животноводческих, 506.22kb.
- Методические указания к лабораторной работе №5 по курсу "Системы передачи данных" Проектирование, 49.75kb.
- Методические указания к лабораторной работе по курсу «Механизация и автоматизация технологических, 316.57kb.
- Методические указания к лабораторной работе волгоград 2000, 186.18kb.
- Методические указания к лабораторной работе по курсу "Базы данных", 114.06kb.
- Методические указания к лабораторной работе №3 по дисциплине «Периферийные устройства», 217.77kb.
- Методические указания к курсовой работе «разработка математических моделей электронных, 1645.67kb.
- Методические указания к лабораторной работе по курсу "Техническая термодинамика" Иваново, 452.64kb.
Федеральное агентство по образованию
ГОУ ВПО «Уральский государственный технический университет – УПИ»
ПАРАМЕТРИЧЕСКАЯ ОПТИМИЗАЦИЯ РАДИОЭЛЕКТРОННЫХ СХЕМ
Методические указания к лабораторной работе по курсу
“Компьютерный анализ электронных схем”
для студентов всех форм обучения специальности
200700 – Радиотехника
Екатеринбург 2005
УДК 681,3,06:621.396.6
Составители В.В. Кийков, В.Ф. Кочкина, К.А. Вдовкин
Научный редактор доц., канд. техн. наук В.И. Гадзиковский
ПАРАМЕТРИЧЕСКАЯ ОПТИМИЗАЦИЯ РАДИОЭЛЕКТРОННЫХ СХЕМ: методические указания к лабораторной работе по курсу «Компьютерный анализ электронных схем” /сост. В.В. Кийко, В.Ф. Кочкина, К.А. Вдовкин. Екатеринбуг: ГОУ ВПО УГТУ-УПИ, 2005. 21с.
Методические указания содержат сведения о постановке задач оптимизации, критериях оптимальности, теории поиска минимума целевой функции. Приведен обзор методов параметрической оптимизации, подробно описан метод Хука – Дживса, даны вопросы для самоконтроля.
Библиогр.: 7 назв. Рис. 6.
Подготовлено кафедрой “Радиоэлектроника информационных систем”.
ГОУ ВПО «Уральский государственный
технический университет-УПИ», 2005
ОГЛАВЛЕНИЕ
Методические указания к лабораторной работе по курсу 1
Екатеринбург 2005 1
УДК 681,3,06:621.396.6 2
ЦЕЛЬ РАБОТЫ 4
1.ОБЩИЕ МЕТОДИЧЕСКИЕ УКАЗАНИЯ 4
2. ТЕОРИЯ ОПТИМИЗАЦИИ 4
2.1. Формальная (математическая) постановка задачи оптимизации 4
2.2. Постановка задачи параметрической оптимизации РЭС 5
2.3. Критерии оптимальности 7
2.4. Стратегия решения задач оптимального проектирования РЭС 9
2.5. Алгоритмы глобального поиска [6] 9
2.5.1. Алгоритм случайного поиска 10
2.5.2. Монотонный алгоритм глобального поиска 10
2.5.3. Алгоритм сканирования на сетке кода Грея 10
2.6. Методы и алгоритмы локального поиска 11
2.6.1. Прямые методы 11
2.6.2. Градиентные методы оптимизации первого порядка 12
2.6.3. Градиентные методы оптимизации второго порядка 13
3. ОПИСАНИЕ КОМПЬЮТЕРНОЙ ПРОГРАММЫ АНАЛИЗА 15
3.1. Запуск программы 15
3.2. Составление задания на оптимизацию 15
3.3. Результаты оптимизации 17
4. СОДЕРЖАНИЕ ЛАБОРАТОРНОЙ РАБОТЫ 19
4.1. Порядок выполнения 19
4.2. Задание к лабораторной работе 19
5.МЕТОДИЧЕСКИЕ УКАЗАНИЯ ПО ПОДГОТОВКЕ ИСХОДНЫХ ДАННЫХ 20
6.СОДЕРЖАНИЕ ОТЧЕТА 20
7.ВОПРОСЫ ДЛЯ САМОКОНТРОЛЯ 20
СПИСОК ЛИТЕРАТУРЫ 21
ЦЕЛЬ РАБОТЫ
Получить представление и практические навыки параметрической оптимизации РЭС при автоматизированном схемотехническом проектировании радиоэлектронной аппаратуры (РЭА).
1.ОБЩИЕ МЕТОДИЧЕСКИЕ УКАЗАНИЯ
Данная работа является третей в комплексе лабораторных работ по методам расчета, анализа и оптимизации радиоэлектронных схем.
В комплекс входят следующие работы:
- Расчет радиоэлектронных схем методом узловых потенциалов.
- Анализ электронных схем модифицированным методом узловых потенциалов.
- Параметрическая оптимизация радиоэлектронных схем.
- Анализ радиоэлектронных схем с помощью схемных функций.
В первой и второй лабораторных работах выполнены частотный анализ, определены чувствительности коэффициента усиления по напряжению от вариаций внутренних параметров, рассчитаны переходная и импульсная характеристики при номинальных значениях параметров элементов РЭС, которые первоначально выбраны (заданы или рассчитаны) не лучшим образом.
В этой работе выполняется параметрическая оптимизация проектируемой РЭС для обеспечения соответствия выходных параметров требованиям технического задания.
2. ТЕОРИЯ ОПТИМИЗАЦИИ
2.1. Формальная (математическая) постановка задачи оптимизации
Оптимизацией параметров (параметрической оптимизацией) принято называть задачу расчета оптимальных номинальных значений внутренних параметров объекта проектирования. Задачи оптимизации параметров в САПР радиоэлектронной аппаратуры сводятся к задачи математического программирования [1]
extr F(X),
XXД, (1)
где XД = {XX0| k (X) ≥ 0, r (X) = 0, k [1:N], r [1:M]}.
Вектор X=(x1, x2, . . . . xn) называется вектором управляемых (варьируемых) параметров; F(X) – целая функция (функция качества); XД – допустимая область; X0 – пространство, в котором определена целевая функция; k(X) и r(X) функции - ограничения.
Словесная формулировка задачи (1): найти экстремум целевой функции F(X) в пределах области XД, ограниченной в пространстве X0 N неравенствами k(X) ≥ 0 и М равенствами r (X) = 0.
Целевая функция должна быть сформулирована исходя из имеющихся представлений о качестве проектируемого объекта: её значение должно уменьшаться с улучшением качества, тогда в (1) требуется минимизация
(extr есть min), или увеличиваться, тогда в (1) требуется максимизация
(extr есть max). Ограничения – неравенства, имеющие вид xi > xi min или
xi < xi max , называют прямыми ограничениями, где xi min и xi max – заданные константы, остальные ограничения называют функциональными.
Задача поиска максимума, как правило, сводится к задаче поиска минимума путем замены F(Х) на -F(Х). Функция F(Х) имеет локальный минимум в точке Х0, если в малой окрестности этой точки F(Х) ≥ F(Х0). И функция F(Х) имеет глобальный минимум в точке Х*, если для всех Х справедливо неравенство F(Х) ≥ F(Х*).
Классическая теория оптимизации подробно изложена в соответствующей литературе, например [2,7]. Ниже основное внимание уделено применению теории оптимизации для поиска оптимальных решений при проектировании радиоэлектронной аппаратуры.
2.2. Постановка задачи параметрической оптимизации РЭС
Решение задачи проектирования обычно связана с выбором оптимального, наилучшим образом удовлетворяющего требованиям технического задания варианта устройства из некоторого допустимого множества решений. Эффективное решение задач базируется на формальных поисковых методах оптимизации и неформальных способах принятия оптимальных проектных решений. Поэтому решение задач оптимального проектирования необходимо рассматривать не только в вычислительном аспекте, но скорее в творческом, учитывая опыт и знания инженера-схемотехника на всех этапах автоматизированного проектирования. Одной из наиболее cложных операций при решении задач оптимального проектирования является этап математической формулировки задачи, которая включает в себя выбор критерия оптимальности, определение варьируемых параметров и задание ограничений, накладываемых на варьируемые параметры [4].
Среди задач схемотехнического проектирования, которые целесообразно решать с привлечением методов оптимизации, выделяют следующие задачи параметрического синтеза и оптимизации:
– определение параметров компонентов схемы, обеспечивающих экстремальные характеристики при заданных ограничениях;
– определение параметров функциональных узлов схем исходя из требований технического задания на характеристики устройства в целом;
– адаптация существующих схемных решений с целью подбора параметров, удовлетворяющих новым требованиям к схеме;
– уточнение значений параметров компонентов схемы, полученных в результате ручного инженерного расчета.
Для схем приемно-усилительной техники оптимизация ведется по отношению к таким выходным параметрам, как:
– коэффициент усиления и полоса пропускания:
– форма частотной характеристики;
– устойчивость усилителя или активного фильтра;
– время запаздывания, длительность фронта импульса.
Примечание. Класс задач, связанный с определением значений параметров компонентов, при которых проектируемая схема удовлетворяет совокупности условий технического задания на разработку, принято называть параметрическим синтезом (по отношению к определяемым параметрам) или параметрической оптимизацией (по отношению к реализуемым характеристикам).
В любой из перечисленных задач реализуемые характеристики проектируемого устройства являются функциями вектора варьируемых (настраиваемых) параметров, составляющих некоторое подмножество полного набора параметров компонентов схемы. Целью параметрического синтеза или оптимизации является определение вектора параметров X, обеспечивающего наилучшее соответствие характеристик устройства Y = Y(X) требованиям технического задания. Для решения этой задачи необходимо, прежде всего, выбрать формальный критерий оценки качества каждого из вариантов проектируемого устройства, который позволил бы различать их между собой и устанавливать между ними отношения предпочтения. Такая оценка может быть представлена функциональной зависимостью вида
F(X) =F(Y(X)),
называемой обычно критерием оптимальности, функцией качества или целевой функцией. Задача поиска параметров компонентов схемы сводится к классической задаче оптимизации – нахождения экстремума некоторой функции качества F(X) при наличии ограничений (равенств, неравенств или двухсторонних границ), накладываемых на варьируемые параметры и характеристики проектируемой схемы [2, 3, 7].
Разнообразные задачи оптимизации аналоговых радиоэлектронных схем имеют общие черты, основные из которых:
– многокритериальность оптимизационных задач;
– отсутствие явных аналитических зависимостей выходных параметров от внутренних параметров, связь между внутренними и внешними параметрами выражается системами уравнений и оценивается количественно только через численное решение этих систем.
Эти особенности обуславливают трудности постановки и решения задач оптимизации аналоговых радиоэлектронных схем.
2.3. Критерии оптимальности
В процессе поиска оптимального решения для каждой конкретной задачи может оказаться предпочтительным определенный вид критерия оптимальности. Базовый набор критериев оптимальности, позволяющий удовлетворить разнообразные требования инженера-схемотехника к оптимизируемым характеристикам проектируемых устройств, изложен в [3].
Так, для отыскания экстремума (минимума или максимума) показателя качества, например, как потребляемая схемой мощность, частота среза, используется само значение критерия оптимальности без преобразования:
F1(X) = Y(X), (2)
В задачах, требующих максимального соответствия оптимизируемой характеристики и некоторой желаемой, например, при оптимизации частотных характеристик, наиболее целесообразно использовать критерий среднего квадратического отклонения
 (3)
(3)где Y* – желаемое или требуемое по техническому заданию значение характеристики,
 знак усреднения.
знак усреднения.Для характеристики, заданной дискретным набором точек, целевая функция
 (4)
(4)где N – число точек дискретизации независимой переменной р; Y(Х, рi) – значение оптимизируемой характеристики в i–ой точке интервала дискретизации; i – весовой коэффициент i–го значения оптимизируемой характеристики, отражающей важность i-ой точки по сравнению с другими (как правило, 0 < i > 1).
Минимизация функции (3) и (4) обеспечивает близость характеристик по среднему квадратическому отклонению. Функция (4) используется при численных методах вычисления Y(Х).
В некоторых задачах оптимизации необходимо обеспечить превышение или не превышение оптимизируемой характеристикой некоторого заданного уровня. Эти критерии оптимальности реализуются следующими функциями:
– для обеспечения превышения заданного уровня

 (5)
(5)– для обеспечения непревышения заданного уровня
 (6)
(6)где YH*,YB* – нижняя и верхняя границы допустимой области для характеристики Y(X).
Если необходимо, чтобы оптимизируемая характеристика проходила в некоторой допустимой зоне (коридоре), используют комбинацию двух предыдущих критериев оптимальности:
 (7)
(7)В тех случаях, когда требуется реализовать лишь форму кривой, игнорируя при этом постоянное смещение по вертикали, используется критерий сдвига
 (8)
(8)
От вида целевой функции зависят важные характеристики вычислительного процесса и, в первую очередь, сходимость процесса оптимизации. Знаки производных целевой функции по управляемым параметрам не остаются постоянными во всей допустимой области. Для целевых функций вида (4) и (8) последнее обстоятельство ведет к их овражному характеру [3]. Таким образом, особенностью целевых функций при решении задач схемотехнического проектирования является их овражный характер, что приводит к большим вычислительным затратам и требует особого внимания к выбору метода оптимизации.
Другой особенностью целевых функций является то, что они обычно многоэкстремальные и наряду с глобальным минимумом имеются локальные минимумы.
Особенность задач оптимизации электронных схем заключается и в том, что внутренние параметры не могут принимать произвольных значений. Так, величины резисторов и конденсаторов ограничены некоторыми максимальными и минимальными значениями. Кроме того, из нескольких внешних параметров обычно можно выделить один основной, по которому проводится оптимизация, а для других указать допустимые границы изменения.
Оптимизационная задача с ограничениями сводится к задаче оптимизации без ограничений с помощью введения штрафных функций. Целевая функция при этом приобретает вид
 (9)
(9)где r , k – численные коэффициенты, учитывающие важность того или иного ограничения относительно других. Они равны нулю при удовлетворении соответствующему неравенству из (1) и принимают некоторые значения в противном случае; Fi(X) – одна из функций качеств, описанных соотношением (2) – (8).
Тем самым выход за пределы допустимой области ХД приводит к увеличению минимизируемой функции цепи и промежуточные решения X j удерживаются «барьером» на границе области ХД. Высота «барьера» определяется значениями и , которые на практике находятся в широких пределах (1-1010). Чем больше и , тем меньше вероятность выхода за пределы допустимой области. Одновременно возрастает и крутизна склона оврага на границе, что замедляет или полностью нарушает сходимость процесса минимизации. В связи с невозможностью указать оптимальные значения и целесообразно начать оптимизацию с малых значений, увеличивая их затем при получении решения за пределами допустимой области.
2.4. Стратегия решения задач оптимального проектирования РЭС
Задачи оптимального проектирования РЭС обладают специфическими особенностями, к которым относят многоэкстремальность и овражность функции качества, наличие ограничений на внутренние и выходные параметры проектируемого устройства, большую размерность вектора варьируемых параметров.
Стратегия решения задач оптимального проектирования предусматривает применение глобальных процедур оптимизации на начальных этапах поиска и уточнение полученного глобального решения быстросходящимися в окрестности оптимальной точки локальными алгоритмами. Такая стратегия позволяет, во-первых, с достаточной надежностью и точностью определить значение глобального экстремума и, во-вторых, существенно снизить вычислительные затраты на поиск. При этом этапы глобального поиска могут выполняться с невысокой точностью, а этапы локального уточнения проводятся в области притяжения глобального экстремума, что требует значительно меньшего числа вычислений.
2.5. Алгоритмы глобального поиска [6]
Алгоритмы глобального поиска, как правило, дают достаточно грубую оценку глобального экстремума при небольших затратах вычислительных ресурсов и требуют значительного увеличения числа вычислений для получения более точной оценки положения экстремума.
2.5.1. Алгоритм случайного поиска
Наиболее простым, с точки зрения реализации вычислительного процесса, является алгоритм поиска глобального экстремума, основанный на зондировании допустимой области ХД последовательностью равномерно распределенных в ней точек с отбором наилучшего варианта из полученных. Качество работы алгоритма во многом определяется свойствами датчика равномерно распределенных случайных чисел, используемых для генерации векторов Х ХД
2.5.2. Монотонный алгоритм глобального поиска
Многомерная оптимизация этим алгоритмом основана на построении развертки (кривой Пеано), отображающей отрезок [0, 1] вещественной оси в гиперкуб допустимой области ХД. С помощью развертки осуществляется однозначное и непрерывное отображение Х(), которое для любой точки 0,1 позволяет получить точку Х ХД. Тогда задача минимизации F(X) в области ХД эквивалентна поиску минимума * одномерной функции
F(X) = F(X()).
Для проведения глобальной одномерной минимизации функции F() на интервале 0,1 в подсистеме оптимизации системы схемотехнического проектирования ДИСП [6] используется монотонная модификация алгоритма глобального поиска, реализующая для ускорения сходимости монотонное преобразование F() в виде
 (10)
(10)которое сохраняет расположение точки глобального экстремума, но делает функцию более гладкой. Алгоритм дает достаточно хорошую оценку глобального экстремума в пределах первых 50–100 итераций. Наилучшие результаты получаются, если число переменных не превышает 5–7.
Для рассмотренного алгоритма в ряде случаев лучшие результаты удается получить при использовании преобразования пространства поиска по логарифмическому закону. Такое преобразование особенно эффективно, если границы поиска различаются на несколько порядков, что актуально в задачах оптимизации РЭА, и если экстремум находится вблизи границ области.
2.5.3. Алгоритм сканирования на сетке кода Грея
Основная идея метода состоит в последовательном изменении специфической сферы поиска с характерными лучами, содержащими точки испытаний, при накоплении и обработке полученной информации. Направление сканирования осуществляется на особой сетке, задаваемой двоичным кодом Грея. Сфера поиска на сетке кода Грея в рассматриваемом алгоритме отличается от традиционной (круг при числе переменных, равном 2) и имеет дополнительно к кругу характерные лучи. Лучи направлены от центра сферы к границам области ХД и тем самым как бы «просвечивают» всю область до ее границ.
Рассматриваемый алгоритм имеет единственный настраиваемый параметр –чувствительность функции качества к вариациям параметров, которая используется для определения шага дискретности по каждой из переменных.
2.6. Методы и алгоритмы локального поиска
Методы и алгоритмы локального поиска чаще всего отыскивают ближайший локальный экстремум, а траектория их движения сильно зависит от выбора начальной точки и характера целевой функции.
2.6.1. Прямые методы
Методы нулевого порядка (прямые методы) в основе своей не имеют строгого математического обоснования и строятся на основании разумных предложений и эмпирических данных.
Простейшим методом нулевого порядка является метод покоординатного спуска (Гаусса–Зейделя). На каждом шаге фиксируются все переменные, кроме одной, по которой определяется минимум целевой функции. Последовательным перебором переменных достигается оптимизация. Этот алгоритм оказывается неэффективным, если целевая функция содержит выражения типа x1x2. Для задач схемотехнического проектирования, в которых не удается получить аналитического выражения целевой функции, характерна ее сложная зависимость от компонентов схемы, и поэтому этот метод обычно неприменим.
Из методов нулевого порядка в случае овражных целевых функций хорошие результаты дает метод Розенброка [1.6], в котором объединены идеи покоординатного спуска и идеи преобразования координат. Наилучшим направлением поиска экстремума является движение вдоль оврага. Поэтому после первого цикла покоординатного спуска производится поворот осей координат так, чтобы одна из них совпадала с направлением оврага Xk - Xk - n,
k = n, 2n, 3n…. Метод Розенброка не дает информации о попадании в точку минимума. Поэтому счет прекращается либо после того, как уменьшение F(X) станет меньше некоторого малого числа , либо после определенного количества циклов.
Метод Хука–Дживса был разработан в 1961 году, но до сих пор является весьма эффективным и оригинальным [2].
Поиск минимума целевой функции состоит из последовательности шагов исследующего поиска вокруг базисной точки, за которой в случае успеха следует поиск по образцу.
Эта процедура состоит из следующих шагов:
- Выбрать начальную базисную точку b1 и шаг длиной hj для каждой переменной xj, j=1,2,…,n скалярной целевой функции F(X).
- Вычислить F(X) в базисной точке b1 с целью получения сведений о локальном поведении функции F(X). Эти сведения будут использоваться для нахождения направления поиска по образцу, с помощью которого можно надеяться достичь большего убывания значения функции F(X). Значение функции F(X) в базисной точке b1 находиться следующим образом:
a) вычисляется значение функции F(b1) в базисной точке b1;
б) каждая переменная по очереди изменяется изменением шага. Таким образом, вычисляется значение F(b1 + he1), где e1- единичный вектор в направлении оси x1. Если это приводит к уменьшению значений функции, то b1 заменяется на b1 + he1. В противном случае вычисляется значение функции F(b1 - he1), и если ее значение уменьшилось, то b1 заменяется на
b1 - he1. Если не один из проделанных шагов не приводит к уменьшению значений функции, то точка b1 остается неизменной и рассматривают изменения в направлении оси x2, т. е. находится значение функции
F(b1 + h2e2) и т. д. Когда будут рассмотрены все n переменные, определяется новая базисная точка b2;
в) если b2 = b1 , т. е. уменьшение функции F(X) не было достигнуто, то исследование продолжается вокруг той же базисной точке b1 , но с уменьшенной длиной шага. Как правило, на практике шаг уменьшают в 10 раз от начальной длины;
г) если b2 b1 , то производится поиск по образцу.
- При поиске используется информация, полученная в процессе исследования, и минимизация целевой функции завершается поиском в направлении, заданном образцом. Эта процедура производится следующим образом:
а) движение осуществляется из базисной точке b2 в направлении b2 - b1 , поскольку поиск в этом направлении уже привел к уменьшению значения функции F(X). Поэтому вычисляется значения функции в точке образца
P1 = b2 + (b2 – b1).
В общем случае
Pi = 2bi+1 – bi;
б) выполняется исследование вокруг точки P1(Pi);
в) если наименьшее значение на шаге 3,б меньше значения в базисной точке b2 (в общем случае bi+1), то получают новую базисную точку b3(bi+2), после чего повторяется шаг 3,а. В противном случае не производится поиск по образцу из точки b2 (bi+1).
- Завершается процесс поиска минимума, когда длина шага (длины шагов) будет уменьшена до заданного малого значения.
2.6.2. Градиентные методы оптимизации первого порядка
Методы отыскания экстремума, использующие производные, имеют строгое математическое обоснование [2]. Известно, что при отыскании экстремума не существует лучшего направления, чем движение по градиенту [3]. Из градиентных методов одним из наиболее эффективных является метод Флетчера–Пауэлла (сопряженных градиентов), являющихся разновидность метода наискорейшего спуска.
Метод наискорейшего спуска состоит из следующих этапов:
- задается начальная точка (вектор Xk k=0);
- вычисляются F(Xk) и F(Xk);
- производится изменение X в направлении Sk = -F(Xk) до тех пор, пока F(X) перестанет убывать;
- полагается k = k+1, вычисляется новое значение F(Xk) и процесс повторяется с 3–го этапа.
Недостаток метода заключается в том, что при овражных функциях приближение к минимуму имеет зигзагообразный характер и требует большое число итераций.
Суть метода Флетчера–Пауэлла состоит в том, что при всех итерациях, начиная со второй (на первой итерации этот метод совпадает с методом наискорейшего спуска), используются предыдущие значения F(X) и F(X) для определения нового вектора направления
 (11)
(11)где
 .
.Тем самым исключается зигзагообразный характер спуска и ускоряется сходимость. Этот алгоритм прост для программирования, и при этом требуется умеренный объем машинной памяти (необходимо заполнить только предыдущее направление поиска и предыдущий градиент).
2.6.3. Градиентные методы оптимизации второго порядка
Итерационный метод, основанный на знании вторых производных, в общем случае известен как метод Ньютона. Пусть функция F(X) разложена в ряд Тейлора и в нем удержано три члена. Результат запишем в следующем виде:
 (12)
(12)Требуется максимизировать разность, стоящую в левой части. Это можно сделать дифференцированием (12) по Х и приравниванием результата к нулю:

Это уравнение можно решить, например, методом LU-разложения, относительно Х. Формально можно записать

где Н=G-1. Направление поиска полагаем теперь совпадающим с вектором
 (13)
(13)При переходе к минимуму матрица Гессе1 будет положительно определенной и можно использовать полный размер шага dk=1 (т.е. не нужен поиск в направлении Sk). Однако вдали от минимума матрица Гессе может и не быть положительно определенной. Более того, вычисление этой матрицы требует больших затрат. Поэтому разработан целый класс других методов, называемых методами с переменной метрикой или квазиньютоновскими, которые лишены этих недостатков [3]. Эти методы были разработаны довольно давно, но обобщены только в последнее время. Они базируются на оценке градиентов и на аппроксимации матрицы Гессе или обратной к ней. Аппроксимация достигается изменением исходной положительно определенной матрицы специальным образом так, чтобы сохранить положительную определенность. Только при достижении минимума полученная матрица аппроксимирует матрицу Гессе (или обратную к ней). Во всех методах этого класса направление поиска определяется, как и в методе Ньютона (13). На каждой итерации по матрице Hk согласно специальной формуле получают матрицу Hk+1. В качестве примера приведем формулу, полученную Дэвидоном, Флетчером и Пауэллом [3], и ее иногда называют ДФП-формулой:
 (14)
(14)Эта формула пригодна только в случае, если (X)Т 0, ТHk 0. Здесь k=Fk+1-Fk.
3. ОПИСАНИЕ КОМПЬЮТЕРНОЙ ПРОГРАММЫ АНАЛИЗА
Программа имеет удобный графический пользовательский интерфейс для работы в среде операционной системы Windows. Исходным описанием оптимизируемой электронной схемы является информация в файле, созданном при выполнении второй лабораторной работы. Загрузив этот файл и выбрав элементы для оптимизации, с помощью этой программы выполняется расчет новых значений элементов. Критерием правильности расчетов является значение минимума целевой функции, которая рассчитывается как взвешенное среднеквадратическое отклонение требуемой и реальной характеристики РЭС: амплитудно-частотной, переходной или импульсной характеристик. Программа имеет стандартный набор элементов управления – меню, панель инструментов … . Автоматически создается
отчет о проведенной лабораторной работе в html – формате.
Примечание. После всех заполнений диалоговых окон значениями, нажимается кнопка <Далее>. Если отображаемый в последующем окне результат не устраивает, то нажатием кнопки <Назад> можно вернуться к предыдущим шагам и изменить условия поиска.
3.1. Запуск программы
При запуске программы открывается окно, в котором в строке меню Файл необходимо открыть файл, сохраненный после выполнения второй лабораторной работы (рис. 1).
3.2. Составление задания на оптимизацию
В файле с описанием схемы содержатся параметры элементов, включая схему замещения транзистора. В левом окне необходимо выбрать варьируемые параметры для параметрической оптимизации. Требуемая характеристика, например АЧХ, задается значениями частоты (в Гц) и соответствующими значениями коэффициента усиления (в Дб). На следующем этапе задается начальный шаг измерения параметров при оптимизации (рис. 2).
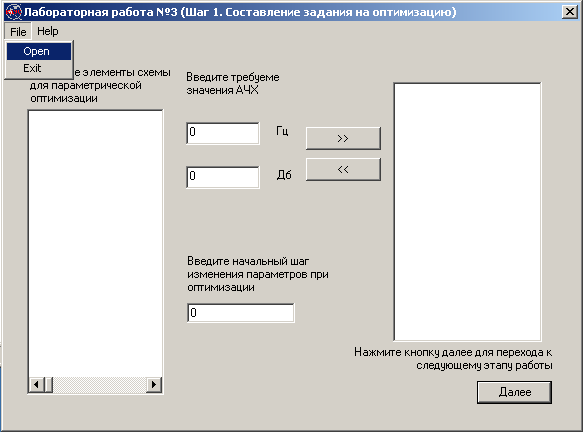
Рис. 1. Окно открытия входного файла
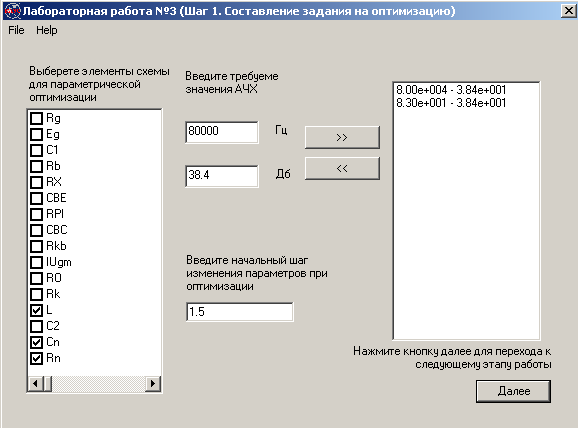
Рис. 2. Окно выбора значений оптимизации
3.3. Результаты оптимизации
На следующем этапе программа представляет результаты расчетов:
- минимум целевой функции;
- параметры варьируемых элементов до и после оптимизации;
- количество вычислений целевой функции;
- количество уменьшений длины шага и поисков по образцу.
Критерием правильности полученных результатов является значение минимума целевой функции. Для биполярного транзистора оно должно быть примерно 10-7 I10-8, а для полевого транзистора – 10-4 I 10-5 (рис. 3).
Если результаты оптимизации устраивают, то переходим к следующему этапу – построению амплитудно-частотной или временных характеристик
(рис. 4, 6,). Для точного определения (нахождения) полосы пропускания РЭС, т.е. верхней и нижней граничных частот, а так же для определения времени переходных процессов имеются таблицы расчетов (рис. 5).
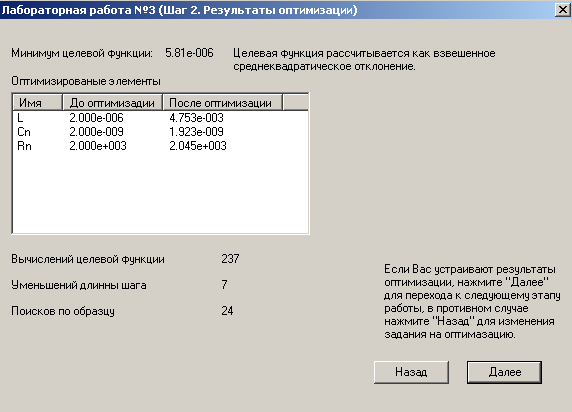
Рис. 3. Окно расчетов после оптимизации
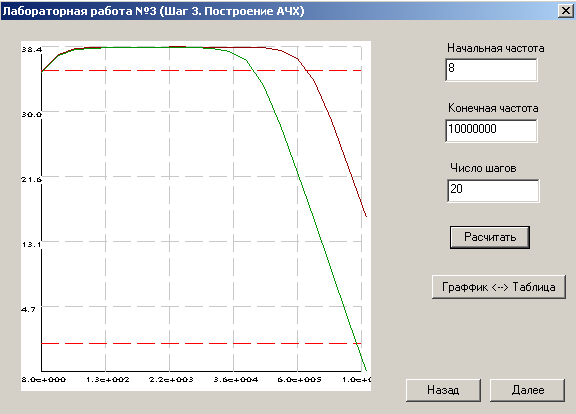
Рис. 4. Окно построения АЧХ
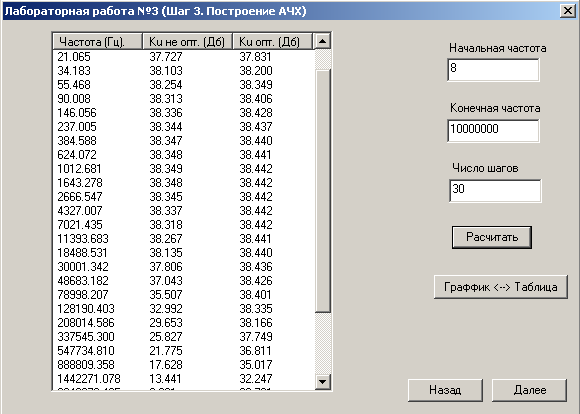
Рис. 5. Значения АЧХ в таблице
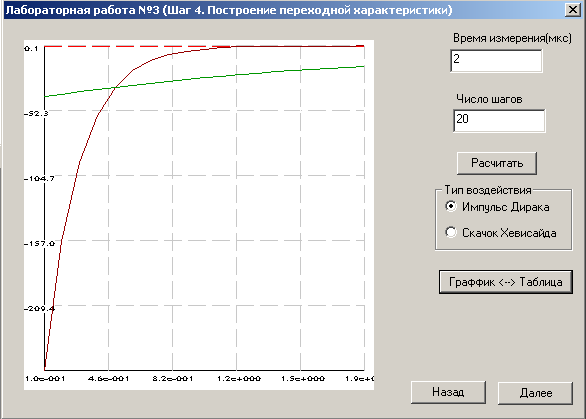
Рис. 6. Окно временных характеристик
4. СОДЕРЖАНИЕ ЛАБОРАТОРНОЙ РАБОТЫ
4.1. Порядок выполнения
1. Подготовленный этап включает ознакомление с методическими указаниями к лабораторной работе, изучение теории оптимизации по конспекту лекций, литературным источникам и разделу 2 данных методических указаний.
2. Второй этап включает в себя выполнение теоретической работы:
- формирование требований к оптимизируемой характеристике РЭС;
- выбор элемента или элементов схемы, по параметрам которых предполагается осуществлять оптимизацию.
3. Загрузка программы-оптимизации с описанием оптимизируемой схемы и заданием на параметрическую оптимизацию.
4. Выполнение оптимизации.
5. Расчет характеристики схемы с оптимизированными параметрами.
6. Заключительный этап.
На этом этапе сравниваются характеристики РЭС до и после оптимизации. По полученным материалам составляется отчет на листах формата А4 (297х210) с обязательным приложением распечаток результатов.
4.2. Задание к лабораторной работе
1. По результатам анализа АЧХ усилителя, полученной во второй лабораторной работе, сформировать требования к идеальной АЧХ. Выбрать способ задания идеальной АЧХ и координаты точек на графике АЧХ.
2. Определить группу элементов, по параметрам которых предполагается осуществить оптимизацию.
-
МЕТОДИЧЕСКИЕ УКАЗАНИЯ ПО ПОДГОТОВКЕ ИСХОДНЫХ ДАННЫХ
5.1. По графику АЧХ, рассчитанной при выполнении второй лабораторной работы, определяются верхняя и нижняя граничные частоты и выясняется влияние высокочастотной индуктивной коррекции.
5.2. Пользуясь знаниями схемотехники усилительных устройств, определяются компоненты, параметры которых определяют верхнюю и нижнюю граничные частоты.
5.3. На графике АЧХ строится идеальная (требуемая по техническому заданию) характеристика. Выбираются точки оптимизации. Для того чтобы сохранить вид АЧХ в полосе пропускания, необходимо также выбрать точки и в этой части характеристики.
-
СОДЕРЖАНИЕ ОТЧЕТА
- Цель работы.
- Исходные данные в виде принципиальной электрической схемы усилительного каскада и параметров его элементов до оптимизации.
- Листинг результатов машинного анализа.
- Анализ результатов. Выводы.
-
ВОПРОСЫ ДЛЯ САМОКОНТРОЛЯ
- Назовите необходимое и достаточное условие существования минимума функции.
- Какая матрица называется положительно определенной?
- Почему целевую функцию называют функцией качества?
- Назовите основное свойство целевой функции.
- Какие задачи называют параметрическим синтезом, а какие – параметрической оптимизацией?
- В каких случаях задача численного поиска минимума целевой функции относятся к задачам нелинейного программирования?
- В чем отличие градиентных методов поиска экстремума функции от прямых методов?
- Поясните понятие глобальный и локальный минимум.
- Чем обусловлены ограничения при параметрической оптимизации радиоэлектронных устройств?
- Поясните метод покоординатного спуска.
- Чем отличается метод сопряженных градиентов от метода наискорейшего спуска?
- Что означает в методе Хука – Дживса «поиск по образцу»?
- Каковы критерии окончания итерационного процесса оптимизации?
СПИСОК ЛИТЕРАТУРЫ
- Системы автоматизированного проектирования в радиоэлектронике: Справочник/Е.В. Авдеев, А.Т. Еремин, И.П. Норенков, М.И. Песков; Под ред. И.П.Норенкова. М.: Радио и связь, 1986. 368с.
- Банди Б. Метода оптимизации. Вводный курс: Пер. с англ. М.: Радио и связь, 1988. 128с.
- Влах И., Сингхал К. Машинные методы анализа и проектирования электронных схем. М.: Радио и связь. 1988. 560с.
- Сборник задач по микросхемотехнике: Автоматизированное проектирование: Учебное пособие для вузов /В.И. Анисимов, П.П. Азбелев, А.Б. Исаков и др.; Под ред. В.И. Анисимова. Л.:Энергоатомиздат, Ленинградское отд-ие, 1991. 224с.
- Диалоговые системы схемотехнического проектирования/ В.Н. Анисимов, Г.Д. Дмитриевич, К.Б. Скобельцын и др.; Под ред. В.Н. Анисимова. М.: Радио и связь, 1988. 288с.
- Разевич В.Д., Раков В.К., Капустян В.И. Машинный анализи оптимизация электронных схем: Учебное пособие по курсам «Усилительные устройства» и «Радиоприемные устройства». М.:МЭИ, 1981. 88с.
- Учебник по матанализу/ Табуева В.А. Математика, математический анализ: Учебное пособие. Екатеринбург: УГТУ-УПИ, 2001. 494с.
- Кийко В.В. Кочкина В.Ф. Вдовкин К.А. Анализ электронных схем модифицированным методом узловых потенциалов. Екатеринбург: УГТУ-УПИ, 2004. 31с.
1 Матрица Гессе – матрица вторых производных