
Методические указания для выполнения контрольных работ для студентов специальности 1 53 01 01 05 "Автоматизация технологических процессов и производств (легкая промышленность)"
| Вид материала | Методические указания |
СодержаниеРешение задач линейного программирования табличным симплекс-методом 6 методические указания к выполнению контрольных работ № 1, 2 |
- Методические указания для студентов специальности 210200 «Автоматизация технологических, 273.81kb.
- Методические указания по выполнению дипломных проектов для студентов специальности, 294.98kb.
- Методические указания для выполнения контрольных работ по курсу «Автоматика и автоматизация, 447.92kb.
- Методические указания и индивидуальные задания для студентов идо, обучающихся по направлению, 142.63kb.
- Т. В. Фёдоров методические указания по технологической практике студентов IV курса, 107.4kb.
- Методические указания по выполнению выпускной квалификационной работы для студентов, 470.69kb.
- Методические указания по выполнению лабораторных работ по курсу «Системы автоматизированного, 369.98kb.
- Методические указания по выполнению курсовой работы для студентов специальности 220301, 189.64kb.
- Методические указания к курсовым (семестровым) и выпускным квалификационным работам, 1017.9kb.
- Кафедра микропроцессорных средств автоматизации Вопросы к государственному экзамену, 85.14kb.
5 РАБОТА № 2
РЕШЕНИЕ ЗАДАЧ ЛИНЕЙНОГО ПРОГРАММИРОВАНИЯ ТАБЛИЧНЫМ СИМПЛЕКС-МЕТОДОМ
Привести ЗЛП к канонической форме и решить её табличным симплекс-методом (варианты заданий соответствуют номерам задач в таблице 2).
Таблица 2 – Задания к контрольной работе № 2
| Задача № 1 | Задача № 2 | Задача № 3 |
    |     |     |
| Задача № 4 | Задача № 5 | Задача № 6 |
    |     |     |
| Задача № 7 | Задача № 8 | Задача № 9 |
    |     |     |
| Задача № 10 | Задача № 11 | Задача № 12 |
    |     |     |
| Задача № 13 | Задача № 14 | Задача № 15 |
| | | |
| Задача № 16 | Задача № 17 | Задача № 18 |
| | | |
| Задача № 19 | Задача № 20 | Задача № 21 |
| | | |
| Задача № 22 | Задача № 23 | Задача № 24 |
| | | |
| Задача № 25 | Задача № 26 | Задача № 27 |
| | | |
| Задача № 28 | Задача № 29 | Задача № 30 |
| | | |
6 МЕТОДИЧЕСКИЕ УКАЗАНИЯ К ВЫПОЛНЕНИЮ КОНТРОЛЬНЫХ РАБОТ № 1, 2
В рекомендованной литературе достаточно полно представлены теоретические и практические материалы, необходимые для изучения данной дисциплины и понимания способов решения и выполнения заданий контрольных работ.
Здесь рассматривается ряд ключевых моментов, которые необходимо знать для выполнения данных контрольных работ, а также примеры использования изложенной учебно-методической информации для решения задач исследования операций.
Общая задача ЛП (ОЗЛП) – задача по отысканию целевой функции записанной в виде:
 (1)
(1)при ограничениях:
где cj , aij , bj – заданные действительные числа; а х = (x1 ,; ...; xn ) – план задачи.
Каноническая форма записи ЗЛП:
 (2)
(2)Эквивалентность и способы преобразования
Наиболее же широко используемые методы решения ЗЛП применяются к задачам, записанным в канонической форме. Поэтому приходится переходить от любой формы ЗЛП к ее каноническому виду, причем нужно быть уверенным, что эти формы эквивалентны.
Пусть исходная ЗЛП имеет вид
 (3)
(3) (4)
(4)Далее ЗЛП преобразуется к каноническому виду. Вводятся т дополнительных (балансовых) неотрицательных переменных xn+i ≥ 0 (i = 1, …, m). Для того чтобы неравенства ограничений типа
 преобразовать в равенства, к их левым частям прибавляются дополнительные переменные xn+i (i = 1, …, m1); для того чтобы неравенства ограничений типа
преобразовать в равенства, к их левым частям прибавляются дополнительные переменные xn+i (i = 1, …, m1); для того чтобы неравенства ограничений типа  преобразовать в равенства, из их левых частей вычитаются дополнительные переменные xn+i (i = m1+1, …, m). В целевую функцию балансовые переменные вводятся с коэффициентами, равными нулю.
преобразовать в равенства, из их левых частей вычитаются дополнительные переменные xn+i (i = m1+1, …, m). В целевую функцию балансовые переменные вводятся с коэффициентами, равными нулю.Получается задача в канонической форме:
 (5)
(5) (6)
(6)Система уравнений (6) эквивалентна системе неравенств (4), т.е. оптимальному решению ( x10 ; …; xn0 ) задачи (3)–(4) соответствует оптимальное решение ( x10 ; …; xn0 ; xn+10 ; …; xn+m0) задачи (5)–(6).
Геометрическая интерпретация и графическое решение ЗЛП
Геометрическая интерпретация задач исследования операций (оптимизационных задач) дает возможность наглядно представить их структуру, выявить особенности. ЗЛП с двумя переменными всегда можно решить графически.
Пусть дана задача
 (7)
(7) (8)
(8)Геометрическая интерпретация ограничений. Каждое из ограничений (3.36) задает на плоскости x1Ox2 некоторую полуплоскость, пересечение которых является областью допустимых решений задачи.
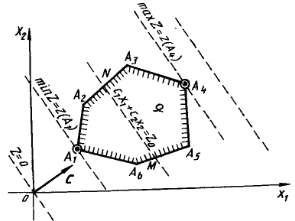 |
| Рисунок 1 – Геометрическая интерпретация целевой функции ЗЛП |
 . Это уравнение прямой линии. В точках прямой N M целевая функция сохраняет одно и то же постоянное значение Z0 . С учётом того, что в равенстве (7) Z–параметр, получается уравнение семейства параллельных прямых, называемых линиями уровня целевой функции.
. Это уравнение прямой линии. В точках прямой N M целевая функция сохраняет одно и то же постоянное значение Z0 . С учётом того, что в равенстве (7) Z–параметр, получается уравнение семейства параллельных прямых, называемых линиями уровня целевой функции.Теперь необходимо определить направление возрастания (убывания) целевой функции. Пусть
 .
.Тогда с1 и с2 – скорости возрастания Z вдоль осей ОX1 и OX2 , а вектор градиента показывает направление наискорейшего возрастания целевой функции (вектор антиградиента – наискорейшего убывания целевой функции).
Порядок графического решения ЗЛП:
- строится область допустимых решений Ω.
- строится вектор градиента/антиградиента.
- проводится произвольная линия уровня.
- при решении задачи на максимум линия уровня перемещается в направлении вектора градиента так, чтобы она касалась границы области допустимых решений (A4 на рис. 1). В случае решения задачи на минимум линию уровня перемещается в антиградиентном направлении (А1 на рис. 1).
- Определяется оптимальный план х* и экстремальное значение целевой функции Z = z(х*).
Пример решения ЗЛП графическим методом
Графическим методом решить задачу линейного программирования на максимум и минимум
