
Моделирования движения поездов (10 пт., ж) по линии метрополитена (10 пт., ж)
| Вид материала | Документы |
- Перспективы развития локомотивных технических средств управления и обеспечения безопасности, 109.3kb.
- Билеты с ответами на 2-й класс, 1660.72kb.
- Градостроительное задание (включая апз) для разработки проекта строительства Солнцевской, 91.66kb.
- С. К. Дулин, А. С. Селецкий, В. И. Уманский Вданной статье рассмотрена задача создания, 108.51kb.
- Инструкция по движению поездов и маневровой работе на железных дорогах, 3019.2kb.
- Приказ «08» февраля 2008 г. №73 /н екатеринбург Омерах по обеспечению выполнения графика, 425.59kb.
- 1. Какие средства сигнализации при движении поездов применяются на метрополитене? Что, 1283.24kb.
- Расписание движения пассажирских поездов по станции Минск-Пассажирский транспортного, 682.58kb.
- Категории поездов ржд. Нумерация установленная для пассажирских поездов, 172.27kb.
- Содержание требований Общие данные 1 Основание для разработки документации Постановление, 151.06kb.
УДК 681.325.5 (8 пт., интервал после 6 пт.)
СИСТЕМА МОДЕЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ (10 пт., ж)
ПО ЛИНИИ МЕТРОПОЛИТЕНА (10 пт., ж)
М.А. Козлов*, И. И. Иванова** (10 пт., ж, к, интервал: перед 6 пт., после 6 пт.)
*Московский государственный университет путей сообщения, Россия, E-mail: kozlov@miit.ru (10 пт., к)
**Государственное предприятие «Ангара», Красноярск, Россия, E-mail: ivanova.ang@mail.ru (10 пт., к)
Разработан алгоритм моделирования движения совокупности поездов по линии метрополитена при изменяющемся напряжении на токоприемнике каждого поезда. Решена актуальная задача синтеза энергооптимальных траекторий движения поезда метрополитена при учете изменения напряжения на токоприемнике поезда. (8 пт., к, интервал: перед 6 пт., после 6 пт.)
THE SYSTEM OF MODELING OF TRAIN OPERATION (10 pt., b)
IN UNDERGROUND LINE (10 pt., b)
M.A. Kozlov, I.I. Ivanova (10 pt., b, i, interval: up to 6 pt., after 6 pt.)
The algorithm of simulation of set train operation on underground line is developed under a varying voltage on a trolley of each train. The actual problem of constructing optimal trajectories of the underground train motion is solved under a varying voltage on the train trolley. (8 pt., i)
Введение (10 пт., ж, интервал: перед 6 пт., после 6 пт.)
Увеличение интенсивности движения поездов метрополитена сделали актуальным создание систем автоматического ведения поездов метрополитена (САВПМ) [1]. Разработка и последующее внедрение САВПМ связаны с большими капиталовложениями [2]. (10 пт., красная строка 1,25 см)
* Здесь и далее многократно сделан пропуск текста. Образец предназначен для авторов *
* Основной интервал – одинарный, кроме того, в указанных местах добавлены дополнительные *
* интервалы перед абзацем и после (меню Формат Абзац в середине слева *
* Выравнивание заголовков – посередине. Выравнивание текста – по ширине. *
* Красная строка в тексте – 1,25 см. В формулах: – табуляция 8 см по центру, *
* дополнительный интервал: перед 6 пт., после 6 п; *
* номер формулы – табуляция 16 по правому краю *
Имитационное моделирование обеспечивает исследование поведения реальной системы в условиях, недоступных натурному эксперименту [3, 4]. (10 пт., красная строка 1,25 см)
Модель поезда метрополитена (10 пт., ж, интервал: перед 6 пт., после 6 пт.)
Математическая модель движения поезда по перегону [8] представляет собой систему дифференциальных уравнений первого порядка: (10 пт., красная строка 1,25 см)
 * табуляции 8 по центру * (1) * табуляция 16 по правому краю, интервал: перед 6 пт., после 6 пт. *
* табуляции 8 по центру * (1) * табуляция 16 по правому краю, интервал: перед 6 пт., после 6 пт. *где t – время с момента начала движения поезда по перегону, сек;
S – путь от начала перегона до текущего положения поезда, м;
V – мгновенная текущая скорость поезда, км/ч;
ξ – коэффициент, учитывающий размерность величин и инерцию вращающихся масс;
f – удельная сила тяги, кГ/т;
w – удельная сила сопротивления движению поезда, кГ/т;
b – удельная сила торможения, кГ/т.
Удельное основное сопротивление движению поезда является функцией скорости и определяется по-разному для режимов тяги и выбега [9].(10 пт., красная строка 1,25 см)
Алгоритм имитационного моделирования движения отдельно взятого поезда (10 пт., ж, интервал: перед 6 пт., после 6 пт.)
Рассмотрим задачу движения одиночного поезда с учетом работы системы энергоснабжения. Мгновенная схема участка системы энергоснабжения при движении одиночного поезда по перегону представлена на рис.1, на котором приняты следующие обозначения:
 – ток поезда, А,
– ток поезда, А,  – сопротивление двигателей, Ом,
– сопротивление двигателей, Ом,  – напряжение на токоприемнике, В,
– напряжение на токоприемнике, В,  ,
,  – напряжение холостого хода cлева и cправа, В,
– напряжение холостого хода cлева и cправа, В,  ,
,  – эквиваленты внешней характеристики слева и справа, Ом,
– эквиваленты внешней характеристики слева и справа, Ом,  ,
,  – сопротивления питающего фидера соответственно слева и справа, Ом,
– сопротивления питающего фидера соответственно слева и справа, Ом,  ,
,  – сопротивления отсасывающего фидера соответственно слева и справа, Ом,
– сопротивления отсасывающего фидера соответственно слева и справа, Ом,  – сопротивление контактной сети, Ом,
– сопротивление контактной сети, Ом,  ,
,  – длина участка пути слева и справа, м. (10 пт., интервал после 6 пт., красная строка 1,25 см)
– длина участка пути слева и справа, м. (10 пт., интервал после 6 пт., красная строка 1,25 см)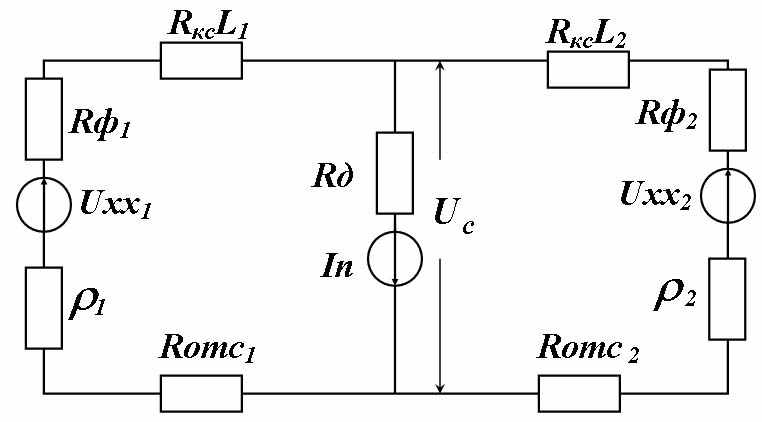
Рис.1. Мгновенная схема участка системы энергоснабжения
для одиночного поезда на перегоне линии метрополитена (10 пт., к)
Анализ энергооптимальных режимов управления (10 пт., ж, интервал: перед 6 пт., после 6 пт.)
С целью оценки влияния изменения напряжения на токоприемнике поезда на результаты синтеза режимов управления движением поезда метрополитена проведен следующий эксперимент.
В табл. 2 приведены значения максимальной
 , минимальной
, минимальной  , средней
, средней  , и среднеквадратичной ошибки
, и среднеквадратичной ошибки  абсолютной разницы в расходе электроэнергии. (10 пт., красная строка 1,25 см)
абсолютной разницы в расходе электроэнергии. (10 пт., красная строка 1,25 см)Таблица 2 (10 пт., к, интервал перед 6 пт.)
Абсолютная разница в расходе электроэнергии (кВт/ч) (10 пт., к)
| Режимы |  |  |  |  | ||||
| 11 т | 18 т | 11 т | 18 т | 11 т | 18 т | 11 т | 18 т | |
| пик | 1,746 | 3,16 | -1,836 | -1,719 | 0,0127 | 0,1411 | 0,6489 | 0,8607 |
| не пик | 0,982 | 0,976 | -1,013 | -1,013 | -0,2221 | -0,1768 | 0,389 | 0,4445 |
Заключение (10 пт., ж, интервал: перед 6 пт., после 6 пт.)
Разработана система моделирования движения поездов по линии метрополитена. Эффективность алгоритмов доказана проведенными имитационными экспериментами. (10 пт., красная строка 1,25 см)
Библиографический список (10 пт., к, интервал: перед 6 пт., после 6 пт.)
1. Микропроцессорные системы автоведения электроподвижного состава / Л.А. Баранов, Я.М. Головичер, Е.В. Ерофеев, В.М. Максимов; Под ред. Л.А. Баранова. М.: Транспорт, 1990. – 250 с.
2. Быков Е.И. (10 пт. в разрядку) Основные задачи моделирования для метрополитена – Тезисы докладов Всесоюзной конф. по моделир. процессов управл. трансп. сист., Владивосток, 1977. – С. 7-10.
3. Кузнецова Н.П., Быков В.П. Возможности и эффективность моделирования систем на вычислительных машинах // Научно-технические и экономические проблемы транспорта.: Материалы 58-й науч. конф. с участием студ, асп, мол. ученых и новаторов производства, Хабаровск, 12-14 апр., 2000, Т1. Хабаровск: Изд-во ДВГУПС, 2000. – С. 88-90.
4. Баранов Л.А., Сидоренко В.Г. Автоматизация расчета оптимальных режимов движения поездов метрополитена // Сб. трудов 4-й международной научно-технической конференции JUZEL'97, Белград, 1997. – С. 21-23.
* Пропуск в списке. Образец предназначен для авторов *
8. Системы автоматического и телемеханического управления электроподвижным составом // Л.А. Баранов, Е.В. Ерофеев, В.И. Астрахан и др.: Под ред. Л.А.Баранова. М.: Транспорт, 1984. – 300 с.
9. Радченко В.Д. Сопротивление движению вагонов метрополитена. М.: Трансжелдориздат, 1957. – 71 с. (10 пт., красная строка 1,25 см)