
История развития техники носит междисциплинарный характер
| Вид материала | Документы |
СодержаниеНачальный этап развития электродвигателя Третий этап в развитии электродвигателей |
- Аннотации, 608.83kb.
- Программа курса «Научное творчество и организация нирс», 107.72kb.
- Круглый стол "Философско-методологические проблемы когнитивных и компьютерных наук", 17.43kb.
- I. Понятие «гендер». История возникновения, специфика, междисциплинарный характер, 370.66kb.
- Проблема адаптации является одной из тех общезначимых областей научных знаний,, 329.31kb.
- Темы рефератов История развития интегральных микросхем. Факторы прогресса технологии, 23.95kb.
- Программа дисциплины теория и методика обучения географии опд. Ф. 04. 2 Цели и задачи, 420.27kb.
- Примеры тем учебно-исследовательских работ старшеклассников, носящих междисциплинарный, 128.56kb.
- Московский общественный научный фонд образы власти в политической культуре России, 3175.1kb.
- План краткий исторический обзор методических систем в философии науки и техники Реальность, 190.01kb.
 , где α – угол наибольшего отклонения стрелки. В результате исследований электромагнитов Ленц и Якоби пришли к установлению ряда закономерностей, таких, например, как пропорциональность магнитного потока току возбуждения и числу витков электромагнита или точное соответствие мощности электромагнита мощности источника тока.
, где α – угол наибольшего отклонения стрелки. В результате исследований электромагнитов Ленц и Якоби пришли к установлению ряда закономерностей, таких, например, как пропорциональность магнитного потока току возбуждения и числу витков электромагнита или точное соответствие мощности электромагнита мощности источника тока.Р
 езультаты, полученные Ленцем и Якоби, имели то значение, что от чисто эмпирических приемов построения электромагнитов перешли к некоторым предварительным расчетам, которые обеспечивали более правильное решение задачи.
езультаты, полученные Ленцем и Якоби, имели то значение, что от чисто эмпирических приемов построения электромагнитов перешли к некоторым предварительным расчетам, которые обеспечивали более правильное решение задачи.Р
Эмилий Христианович Ленц
(1804 – 1865)
азработанный Ленцем баллистический метод измерения тока позволил ему произвести много исследований, в том числе и зависимости электропроводности металлов от их температуры.
2.4. Основные направления в развитии электрических машин постоянного тока
Основы электромеханики были заложены крупнейшими открытиями первой трети XIX в. Основными научными предпосылками электромеханики явились создание основ электродинамики и открытие явления электромагнитной индукции. Накопившийся после промышленного переворота практический опыт конструирования машин и механизмов, паровых двигателей и т. п. стал основой конструктивных решений и в области электрических машин, электромагнитных аппаратов и приборов.
Создатели первых электромагнитных устройств, при помощи которых демонстрировалось непрерывное превращение электрической энергии в механическую или обратно, еще не ставили перед собой серьезных энергетических задач. Во время первых работ в области электромеханики не было еще острой потребности в построении новых мощных источников электрической или механической энергии. Паровой двигатель прочно удерживал за собой решающие позиции, и сфера применения его непрерывно расширялась.
В середине XIX века положение начало меняться. В связи с успехами электрического освещения и других энергетических применений электричества (гальванопластика, электротермия, электрическая тяга) потребность в мощных источниках электрического тока сильно возросла. Позже, в конце XIX в., развитие централизованного производства электроэнергии и необходимость по этой причине освоить передачу энергии на большие расстояния выдвинули вопросы построения мощных и экономичных электрических генераторов и электрических двигателей как задачу громадного хозяйственного значения.
В процессе решения этих крупных задач электрическая машина прошла длинный и сложный путь развития от физических игрушек до завершенных промышленных конструкций. Однако вначале развитие электрических генераторов и электрических двигателей шло совершенно различными путями, что вполне соответствовало состоянию науки об электричестве и магнетизме того периода: принцип обратимости электрической машины, как указывалось выше, был открыт в 30-х годах, а использован в широких масштабах начиная с 70-х годов прошлого века. В связи с этим представляется вполне правомерным рассмотреть отдельно развитие генератора и электродвигателя в период до 1867 г.
2.5. Основные этапы развития электродвигателя постоянного тока
В первой половине XIX в. паровой двигатель, занимал преобладающее положение среди двигателей, применявшихся бурно развивавшейся капиталистической машинной индустрией. Будучи безусловно прогрессивным фактором в технике конца XVIII и начале XIX в., он обладал тем не менее рядом существенных недостатков, которые выступали все более и более отчетливо по мере развития промышленности. К концу XIX в. паровой двигатель уже не мог оставаться единственным источником механической энергии в цехах промышленных предприятий. Необходимость перейти к более гибкой и экономичной системе промышленного привода настоятельно требовала отказа от трансмиссий, т. е. перехода по возможности к одиночному приводу. Но для такой системы привода в большинстве случаев нужен был экономичный двигатель небольшой мощности. Кроме требований, предъявлявшихся системой распределения энергии между исполнительными механизмами, двигатель промышленного предприятия должен был удовлетворять также многим другим условиям, например таким, как возможность автоматизации, небольшие габариты и вес (что дает возможность легко конструктивно сочленять двигатель и исполнительный механизм), безопасность в пожарном отношении, минимальные расходы по надзору, гигиеничность эксплуатации и пр. Всем этим требованиям наилучшим образом удовлетворял электрический двигатель. Так, в последней трети XIX в. произошло разделение на первичные (тепловые, гидравлические) и вторичные (электрические) двигатели.
Поскольку все первые потребители электрической энергии питались исключительно постоянным током и этот род тока был наиболее изучен, то и первые электрические машины были машинами постоянного тока.
В развитии электродвигателя постоянного тока можно наметить три основных этапа, которые ниже будут последовательно рассмотрены. Следует заметить, что это разделение на этапы является условным, так как конструкции и принципы действия электродвигателей, характерные для одного этапа, в отдельных случаях появлялись и на более поздних этапах; с другой стороны, более поздние и более прогрессивные конструкции в их зародышевой форме нередко можно найти на более ранних ступенях развития электродвигателя. Следует иметь в виду, что для характеристики каждого этапа развития электродвигателя в дальнейшем изложении приводятся только наиболее типичные конструкции.
Начальный этап развития электродвигателя (1821 – 1834 гг.) характеризуется созданием физических приборов, демонстрирующих непрерывное преобразование электрической энергии в механическую. Первым таким прибором было описанное выше устройство Фарадея, в котором он впервые получил взаимное вращение магнитов и проводников с током.
С
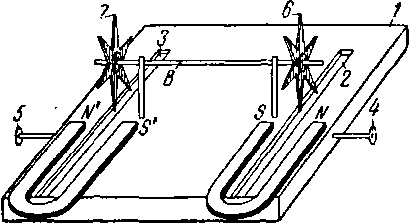
Рис. 2.3. Колесо Барлоу
ледующее после Фарадея описание различных приборов, в которых действие магнитов вызывает движение проводника с током в магнитном поле, в частности непрерывное вращение колеса, дано в книге П. Барлоу «Исследование магнитных притяжений», опубликованной в 1824 г. Построенное им так называемое «колесо Барлоу» является одним из исторических памятников предистории развития электротехники. Колесо Барлоу (рис. 2.3) по принципу действия представляет собой униполярную электрическую машину, работающую в двигательном режиме; на рис. 2.3 приняты следующие обозначения: 1 – четырехугольная деревянная подставка с желобками 2 и 3, наполняемыми ртутью; 4 и 5 – два проводника, внутренние концы которых входят соответственно в желобки 2 и 3, а внешние концы служат для присоединения к полюсам источника тока. Медные колеса 6 и 7 насажены на ось 8 и могут вращаться вместе с нею. Концы их зубцов при вращении попеременно погружаются в ртуть. На подставку 1 положены два постоянных (магнита NS и N’S’ таким образом, что их стороны параллельны желобкам 2 и 3. Если прибор соединить с полюсами генератора тока, то зубчатые колеса начнут быстро вращаться. Барлоу отмечает, что перемена контактов или перемена положения полюсов магнитов вызывает немедленно перемену направления вращения колес. В этом приборе происходит следующее физическое явление. При замыкании цепи электрический ток входит, например, через проводник 5 в ртуть желобка 3, затем вступает в колесо 7 и проходит по нему от периферии к центру; далее ток по оси 8 направляется ко второму колесу, по которому проходит в направлении от центра к периферии и через зубцы входит в ртуть желобка 2, откуда через проводник 4 возвращается к источнику тока. Легко установить (например, пользуясь правилом левой руки), что оба колеса будут вращаться в одном и том же направлении.
Колесо Барлоу не имело практического значения и остается до сих пор лабораторным демонстрационным прибором. В свое время оно сыграло роль в том отношении, что способствовало развитию экспериментов в области построения электродвигателя, пригодного для практики. К решениям, отвечавшим требованиям практики, пришли не сразу, а осуществив построение ряда электродвигателей, практическая ценность которых была недостаточной.
Характерным для первого этапа развития электродвигателя примером, отражающим иное направление в создании конструктивных форм, является прибор американского физика Джозефа Генри. Генри в 1831 г. опубликовал статью «О качательном движении, производимом магнитным притяжением и отталкиванием», в которой он описал построенный им электродвигатель. Это устройство, как и колесо Барлоу, не пошло дальше лабораторных испытаний, и сам изобретатель не придавал серьезного значения своей конструкции. Значение электродвигателя Генри в историческом разрезе заключается в том, что в этом устройстве впервые сделана попытка использовать притяжение разноименных и отталкивание одноименных магнитных полюсов для получения движения (в данном случае качательного) некоторого рабочего органа.
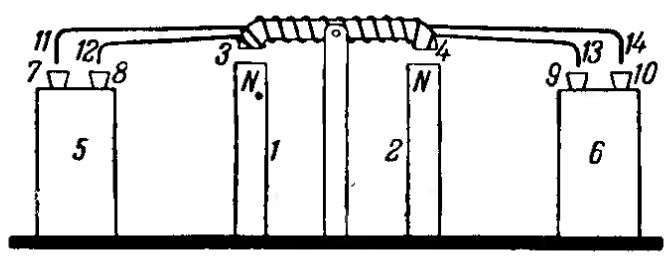
Рис. 2.4. Схема электродвигателя Генри
Рис. 2.4 схематически иллюстрирует устройство электродвигателя Генри. На деревянной подставке вертикально установлены обращенные северным полюсом вверх постоянные стержневые магниты 1 и 2, между которыми расположена деревянная стойка; на стойке шарнирно укреплен в виде коромысла горизонтальный электромагнит 3-4 с загнутыми вниз концами сердечника; когда электромагнит находится в горизонтальном положении, то его полюса отстоят примерно на 1 дюйм от полюсов магнитов 1 и 2. По обеим сторонам от деревянной подставки расположены гальванические элементы 5 и 6, к цинковым и медным электродам которых припаяны чашечки со ртутью 7-8 и 9-10. Электромагнит 3-4 имеет две обмотки с двумя парами выводов 11-12 и 13-14 с каждой стороны. Если электромагнит 3-4 наклонить влево, то выводы 11 и 12 погрузятся в чашечки 7 и 8 и через обмотку электромагнита, пройдет ток; при этом на левом конце электромагнита 3 образуется северный, а на правом 4 – южный полюса.
С

Джозеф Генри
(1791 – 1878)
еверный полюс электромагнита 3 оттолкнется от северного полюса постоянного магнита 1 и одновременно южный полюс 4 притянется северным полюсом 2. Коромысло наклонится вправо, а вместе с тем выводы 13 и 14 погрузятся в чашечки 9 и 10; в результате этого по обмотке электромагнита пройдет ток другого направления, изменится полярность электромагнита 3-4 и аналогичным образом коромысло наклонится влево. Так электромагнит 3-4 будет равномерно качаться (в модели, построенной Генри, электромагнит совершал 75 качаний в минуту). Один из электродвигателей такого типа, построенный в 1831 г., имел мощность 0,044 Вт (по современным подсчетам).
Несмотря на то, что как на первом этапе, так и позднее предлагались многочисленные конструкции двигателей с качательным движением якоря, более прогрессивными всегда были попытки построить электродвигатель с вращательным движением якоря. Одной из таких попыток был электродвигатель (рис. 2.5), описанный в 1833 г. профессором Лондонского университета В. Риччи.

Рис. 2.5. Электродвигатель Риччи
Магнитное поле в этом двигателе создавалось постоянным неподвижным подковообразным магнитом, поставленным полюсами N и S вертикально вверх. Между этими полюсами на вертикальной оси помещался электромагнит 1-2, по обмотке которого пропускался ток. Направление тока изменялось коммутатором 3, вследствие чего полярность электромагнита периодически менялась. Взаимодействие полюсов постоянного магнита и электромагнита 1-2 приводило к вращению электромагнита вокруг оси. Описанный электродвигатель вследствие своей незначительной мощности не мог иметь практического значения.
В

Борис Семенович Якоби
(1801 – 1874)
торой этап развития электрических двигателей (1834 – 1860 гг.) характеризуется преобладанием конструкций с вращательным движением якоря и с резко пульсирующим вращающим моментом. Все двигатели этого периода действовали на принципе притяжения и отталкивания, производимого электромагнитами, либо на взаимодействии электромагнитов с постоянными магнитами или со стальными пластинами. Наиболее характерные и существенно важные работы по конструированию электродвигателей этого рода принадлежат академику Б. С. Якоби. Изучая конструкции электродвигателей своих предшественников, в которых было осуществлено возвратно-поступательное или качательное движение якоря, Якоби отозвался об одном из них, «что такой прибор будет не больше, чем забавной игрушкой для обогащения физических кабинетов, и что его нельзя будет применять в большом масштабе с какой-нибудь экономической выгодой». Поэтому Якоби направил свое внимание на построение более мощного электродвигателя с вращательным движением якоря.
В 1834 г. Якоби построил и описал электродвигатель, который действовал на принципе притяжения и отталкивания между электромагнитами. Этот двигатель (рис. 2.6) имел две группы П-образных электромагнитов, из которых одна группа (четыре П-образных электромагнита) располагалась на неподвижной раме, а другая аналогичная группа – на вращающемся диске (расположен слева). В качестве источника тока для питания электромагнитов была применена батарея гальванических элементов. Для попеременного изменения полярности подвижных электромагнитов, т. е. для того, чтобы машина могла работать, служил коммутатор.
Коммутатор представлял собой чрезвычайно важную и глубоко продуманную часть устройства электродвигателя Якоби. Конструктивно он был выполнен следующим образом (рис. 2.7). На валу двигателя устанавливались четыре металлических кольца 1, 2, 3 и 4, изолированные от вала; каждое кольцо имело четыре выреза, каждый из, которых соответствовал одной восьмой части окружности.
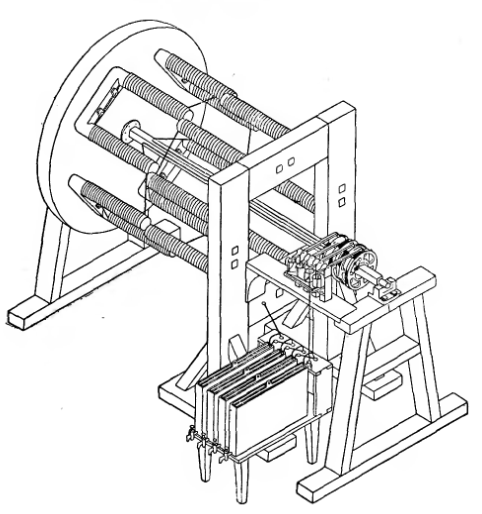
Рис. 2.6. Общий вид электродвигателя Б. С. Якоби (конструкция 1834 г.)
Вырезы были заполнены изолирующими вкладками, каждое кольцо было смещено на 45° по отношению к предыдущему. По окружности кольца скользил рычаг 5, представлявший собой своеобразную щетку. Второй конец каждого рычага был погружен в соответствующий сосуд с ртутью 6, к которому подводились проводники от батареи (сосуды с ртутью являлись наиболее распространенными в начале XIX в. контактными устройствами). Таким образом, при каждом обороте кольца четыре раза разрывалась электрическая цепь. К электромагнитам вращающегося диска отходили от колец проводники, укрепленные на валу машины. Обмотки I всех электромагнитов неподвижной рамы были соединены последовательно и обтекались током батареи в одном направлении. Обмотки электромагнитов вращающегося диска II были также соединены последовательно, но направление тока в них с помощью коммутатора изменялось 8 раз за один оборот вала. Следовательно, полярность этих электромагнитов также изменялась 8 раз за один оборот вала, и эти электромагниты поочередно притягивались и отталкивались электромагнитами неподвижной рамы.

Рис. 2.7. Коммутатор двигателя Якоби
Н
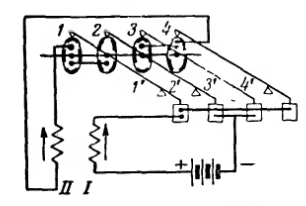
Рис. 2.8. Схема коммутации двигателя Якоби: I – обмотка подвижной рамы; II – обмотка неподвижной рамы; 1, 2, 3, 4 – кольца коммутатора; 1', 2', 3', 4' – сосуды с ртутью
а рис. 2.8 представлена схема коммутации электродвигателя Якоби, на которой стрелками указано направление тока для данного положения вала. Из схемы видно, что первое и второе, третье и четвертое кольца попарно электрически соединены между собой; также попарно соединены между собой первый и четвертый и второй и третий сосуды с ртутью. По схеме коммутации можно проследить направления токов во всех элементах электрической цели, равно как и установить, что при повороте якоря на 45° направление тока в обмотках подвижных электромагнитов I меняется на противоположное (т. е. 8 раз за каждый оборот вала). По обмотке неподвижной рамы II проходил ток всегда в одном направлении.
Первый электродвигатель, построенный Якоби, мог поднимать груз весом 10 – 12 фунтов (т. е. примерно 4 – 5 кг) на высоту. 1 фут (примерно 30 см) в секунду, что составляло мощность около 15 Вт.
Желание увеличить мощность электродвигателя привело Б. С. Якоби к созданию конструкции электродвигателя сдвоенного типа (рис. 2.9). Этот электродвигатель имел 24 неподвижных П-образных электромагнита и 12 подвижных стержневых электромагнитов, но действовал на том же принципе, что и первый его электродвигатель.
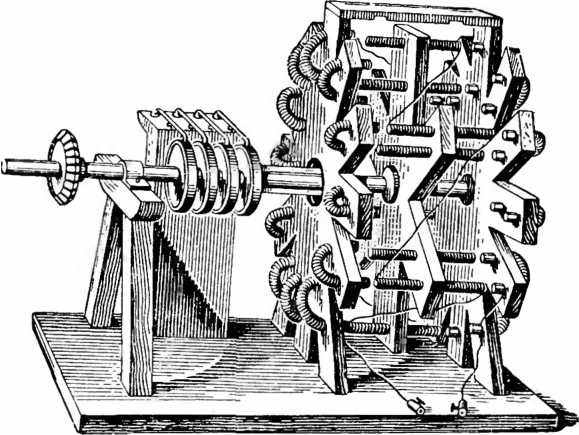
Рис. 2.9. Электродвигатель Якоби сдвоенного типа
Прогрессивным в этом варианте двигателя Якоби было то, что при подобной конструкции электродвигателя подшипники разгружались от аксиальных усилий, которые возникали в первом электродвигателе Якоби при совмещении осей подвижных и неподвижных электромагнитов. Изменение конструкции, однако, не дало значительного увеличения мощности и не привело к возможности применить электродвигатель на практике, к чему стремился Якоби, работая над электродвигателем. Нужно было искать новое конструктивное решение, которое через несколько лет и было найдено Б. С. Якоби.
Якоби построил первый свой электродвигатель в мае 1834 г., а в ноябре того же года он представил Парижской академии сообщение об этом устройстве. Сообщение было прочитано на заседании Парижской академии 1 декабря 1834 г. и немедленно после этого опубликовано. Таким образом, известие об изобретении Б. С. Якоби очень скоро распространилось по всем странам.
В 1837 г. американский техник Т. Девенпорт также построил электродвигатель с непосредственным вращением якоря, действовавший на принципе взаимодействия подвижных электромагнитов с неподвижными постоянными магнитами. В этой конструкции были некоторые прогрессивные идеи, на которые обратили внимание конструкторы электродвигателей, в том числе и Б. С. Якоби.
Электродвигатель Девенпорта (рис. 2.10) имел четыре горизонтальных крестообразно расположенных электромагнита 2, 3 и 4, укрепленных на деревянном диске, жестко связанном с вертикальным валом. Эти электромагниты были расположены внутри двух постоянных магнитов 5 и 6 в форме полуокружностей, опирающихся на деревянное кольцо. Магниты 5 и 6 соприкасались одноименными полюсами и давали кольцо с двумя полюсами N и S. На особой подставке были расположены медные пластины 7 и 8, разделенные посредине изоляцией; к ним подводился ток от источника питания. Концы последовательной обмотки электромагнитов 1 и 3 имели пружинящие контакты 9 и 10, а электромагнитов 2 и 3 – такие же контакты 11 и 12. Взаимодействие электромагнитов и постоянных магнитов приводило электродвигатель в работу, причем полярность электромагнитов в соответствующие моменты изменялась при помощи коммутатора. Сравнивая электродвигатели Якоби и Девенпорта, следует отметить, что в отношении общего конструктивного решения Девенпорт сделал шаг назад, заменив неподвижные электромагниты постоянными магнитами (которые имеют больший вес и подвержены размагничиванию). Кроме того, коммутирующее устройство Якоби было выполнено удачнее, чем коммутатор Девенпорта. Однако в целом двигатель Девенпорта был более компактен благодаря расположению в одной плоскости подвижных и неподвижных магнитов. Если бы двигатель Девенпорта выполнить, например, сдвоенным, как это делал Якоби со своим двигателем, то длина вала двигателя была бы намного меньше, чем у сдвоенного двигателя Якоби; это обстоятельство не могло не привлечь внимания Якоби, стремившего увеличить мощность своего электродвигателя при сравнительно небольшом увеличении его габаритов.

Рис. 2.10. Электродвигатель Т. Девенпорта
Электродвигатель Якоби, построенный в 1834 г. и описанный выше, широко демонстрировался автором и подвергался опробованиям для приведения во вращение различных механизмов. Якоби старался найти такую область применения, для которой электродвигатель был бы наиболее удобен и целесообразен. Такой областью, по мнению Якоби, был водный транспорт. Этот выбор нельзя считать случайным. В то время преобладали деревянные суда, оснащенные парусами. Управление парусами было весьма сложным; действия парусного флота полностью зависели от воздушных течений, а в периоды штиля парусный флот оказывался бессильным. Применение парового двигателя для деревянного судна было связано с рядом неудобств. Котел, паровой двигатель и угольный бункер имели большой вес и занимали на судне много места. С точки зрения противопожарной безопасности наличие на борту паросиловой установки было весьма нежелательным, так как требовались особые очень сложные противопожарные мероприятия. В этих условиях применение электродвигателя на судне представлялось во всех отношения целесообразным. При выяснении обстоятельств, которые побудили Якоби вести опыты с электродвигателем на водном транспорте, не следует забывать также того, что Морское ведомство России в то время весьма доброжелательно встречало все предлагавшиеся усовершенствования и, как правило, содействовало их испытанию и внедрению.
Якоби ясно отдавал себе отчет в том, что, несмотря на положительные особенности электродвигателя, возникнет ряд трудностей при практическом осуществлении идеи электродвижения судов. Выявление этих трудностей и возможных недостатков применения электродвигателей могло быть осуществлено только при опытах, организованных в достаточно широком масштабе.
В середине 1837 г. Якоби, состоявший тогда профессором Дерптского университета, представляет в Министерство народного просвещения записку о необходимости организации исследований электродвигателей его системы. В результате этого обращения была создана «Комиссия для производства опытов относительно приспособления электромагнитной силы к движению машин по способу профессора Якоби», в состав которой входил ряд представителей Морского ведомства (председателем Комиссии был адмирал Крузенштерн) и ученых (акад. Э. X. Ленц, чл.-корр. Академии наук П. Л. Шиллинг и др.). Комиссия получила для производства опытов бот, вмещавший 12 пассажиров и рассчитанный на 10 гребцов. На этом боте надлежало установить электродвигатель Якоби и произвести соответствующие испытания и технико-экономические подсчеты. Вначале Якоби, по-видимому, сделал попытку установить на боте свой электродвигатель конструкции 1834 г., поместив горизонтальный вал по всей ширине судна от борта до борта и разместив соответствующее число неподвижных рам и вращающихся дисков с электромагнитами. На концах этого вала, выступавших за корпус судна, должны были находиться гребные колеса. Место, которое должен был занимать такой электродвигатель на судне, как показывают подсчеты, оказалось чрезвычайно большим. Поэтому Якоби отказался от применения для опытов этого своего электродвигателя и приступил к разработке двигателя новой конструкции, которая была осуществлена в 1838 г.
В новой конструкции Якоби пошел по пути механического объединения работы нескольких электродвигателей на общий вал. Здесь и нашло свое практическое применение предложение Девенпорта располагать неподвижные и вращающиеся магниты в одной плоскости: объединение на общем вертикальном валу нескольких электродвигателей такой конструкции увеличивало размеры электродвигателя по вертикальному направлению, что было вполне удобно для опытной судовой установки.
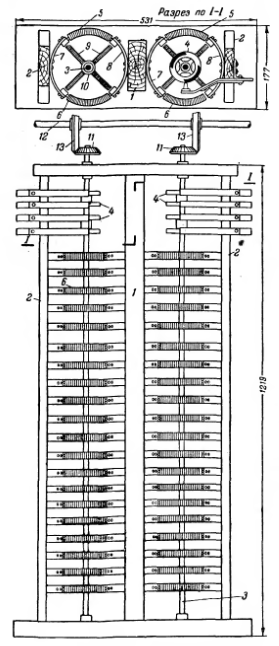
Рис. 2.11. Чертёж электродвигателя Якоби (конструкция 1838 г.)
Двигатель Якоби конструкции 1838 г. представлял собой следующее (рис. 2.11). В деревянной станине, образованной одной средней стойкой 1 и двумя боковыми стойками 2, установлены 40 электродвигателей, подразделенных на две группы (модель отдельного двигателя Б. С. Якоби представлена на рис. 2.12). Каждая группа из 20 электродвигателей имела общий вертикальный вал 3 и общий коммутатор 4. Неподвижная часть каждого электродвигателя представляла собой кольцо, составленное из двух электромагнитов 5 и 6, изогнутых по дуге окружности и скрепленных между собой скобами из немагнитного материала 7 и 8. Каждый из электромагнитов 5 и 6 занимал по длине четверть окружности кольца. Подвижная часть каждого из электродвигателей была составлена из четырех электромагнитов 9, укрепленных на втулке 10. Для питания током обмоток электромагнитов на «электрическом боте» было установлено 320 гальванических элементов.
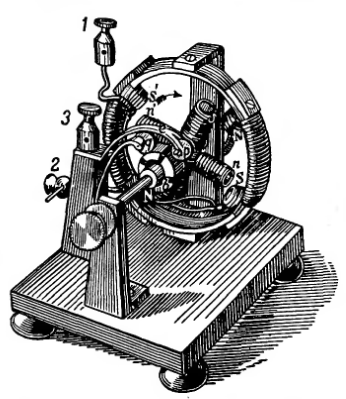
Рис. 2.12. Модель одного элемента электродвигателя Якоби (конструкция 1838 г.): 1,2 – зажимы неподвижной обмотки; 3 – зажим коммутирующего устройства
Изменение направления тока в обмотках подвижных электромагнитов 9 осуществлялось коммутаторами 4, аналогичными описанному выше коммутатору первого двигателя Якоби. На каждом из двух вертикальных валов 3 была установлена коническая шестерня, сцепленная с конической шестерней 13, укрепленной на горизонтальном валу 12. Последний служил для приведения во вращение гребных колес, расположенных по обоим бортам «электрического бота».
Знакомство с этой конструкцией электродвигателя показывает, что Б. С. Якоби не построил какую-то принципиально новую машину, а пошел по пути механического соединения определенного числа элементарных машин. Эта работа Якоби отражала типичную для середины XIX века тенденцию в развитии электрических машин, когда ученые, не найдя еще качественно новых решений, пытались удовлетворить потребности практики простым количественным развитием существовавших машин.
Испытания электродвигателей Якоби, установленные на боте, показали возможность применения электродвигателей для целей практики, но в то же время обнаружили, что при питании электродвигателей током от гальванических батарей механическая энергия получается чрезмерно дорогой, вследствие чего следует признать крайнюю неэкономичность электродвигателей на данном этапе развития электротехники. Произведенные опыты, а также теоретическое исследование электрической машины привели к очень важному для практики выводу: разрешение вопроса о более или менее широком применении электродвигателей находится в прямой зависимости от удешевления электроэнергии, т. е. от создания генератора тока более экономичного, чем гальванические батареи.
Однако и в тех условиях, когда питание электродвигателей могло осуществляться лишь при помощи гальванических элементов, на практике были случаи, когда выгоднее было устанавливать электродвигатель, чем агрегат для получения механической энергии от парового двигателя. В некоторых отраслях производства поэтому электродвигатель находит спорадическое применение в 50-х и 60-х годах. В качестве одного из примеров можно указать типографии. В то время большинство производственных операций в типографиях велось либо ручным способом, либо на машинах с ручным приводом. Но появление крупных печатных машин потребовало привода от двигателя. Для одной крупной печатной машины, обычной для типографий того времени, работавшей к тому же периодически, а не в течение целого рабочего дня, проще было использовать электродвигатель. В этих и аналогичных случаях практики в 50-х и 60-х годах прошлого века имел распространение электродвигатель французского электротехника П. Г. Фромана.
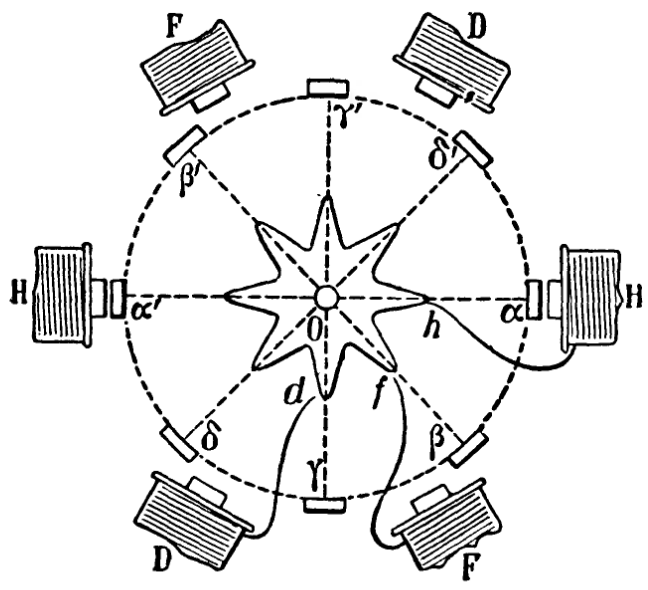
Рис. 2.13. Принципиальная схема двигателя Фромана
Принципиальная схема электродвигателя Фромана показана на рис. 2.13. На колесе, вращающемся на оси О, укреплены на равных друг от друга расстояниях параллельно оси восемь толстых пластин из мягкой стали; концы этих пластин обозначены α, β, γ, δ и α', β', γ', δ'. Каждый из углов αОβ, βОγ равен 45°. Вокруг колеса установлены на станине шесть подковообразных магнитов (рис. 2.14), проекции которых обозначены Н, F, D, а каждый из углов HOF, FOD и т. д. равен 60°. Следовательно, когда два электромагнита Н находятся прямо против пластин α и α', следующие электромагниты F находятся впереди пластин β и β' на угол 15°. Ток идет в обмотку электромагнитов через коммутатор, который осуществляет следующие переключения. В том положении, которое показано на рис. 2.13, ток идет в электромагниты F; тогда электромагниты будут притягивать пластины β, β' и вал повернется на 15°, после чего β и β' окажутся непосредственно против F. В этот момент прекратится прохождение тока через эти два электромагнита, а ток пойдет через электромагниты D, находящиеся также на расстоянии 15° от пластин γ и γ' и т. д. Таким образом, за время одного оборота подвижное колесо подвергается 24 притягивающим действиям, происходящим всегда в одном и том же направлении и при этом только тогда, когда стальные пластины находятся близко от сердечника соответствующего электромагнита. Для коммутации тока служит колесо с восемью зубцами, соответствующими пластинам мягкой стали α, β и т. д.; это зубчатое колесо вращается вместе с большим колесом, изолировано от вала и находится в постоянном контакте с положительным полюсом батареи. Зубцы снабжены тремя пружинами d, h и f, которые могут подводить ток к соответствующим электромагнитам: Н, F и D. Эти пружины неподвижны, а концы их занимают по отношению к зубцам такие же положения, как Н, F и D в отношении стальных пластин α,β и γ. Когда α располагается против Н и начинает переходить это положение, зубец отходит от пружины h, но следующий зубец прикоснется к f и станет направлять ток в F до тех пор, пока не окажется против F; тогда третий зубец придет в контакт с пружиной d и начнет направлять ток в D.
На рис. 2.14 показан общий вид электродвигателя Фромана; два верхних электромагнита для большей ясности общего вида удалены.
Некоторые из электродвигателей, построенных до 1667 г., действовали на принципе втягивания стального сердечника в соленоид; получавшееся при этом возвратно-поступательное движение преобразовывалось посредством балансира и шатунно-кривошипного механизма во вращательное движение вала, снабженного для равномерности хода маховыми колесами. Таковы, например, электродвигатели Пейджа (рис. 2.15) и Бурбуза (рис. 2.16). Как видно из конструктивного оформления этих электродвигателей, мысль их изобретателей находилась в плену кинематических особенностей работы паровых машин, в которых возвратно-поступательное движение одного органа (шток поршня) преобразовывалось во вращательное движение вала посредством балансира, кривошипа и т. п.
Все рассмотренные выше электродвигатели действовали на простейшем принципе взаимных притяжений и отталкиваний магнитов или электромагнитов; эти электродвигатели имели якори простейшей формы в виде стержня с обмоткой. Такие стержневые якори можно рассматривать как явнополюсные. Этим электродвигателям были свойственны существенные недостатки. Наиболее серьезными из них являлись: большие габариты машины при сравнительно малой мощности, большое магнитное рассеяние и низкий к. п. д. Кроме того, вращающий момент на валу таких электродвигателей отличался непостоянством, и в связи с попеременными притяжениями и отталкиваниями стержневых якорей действие таких электродвигателей было в большей или меньшей степени толчкообразным. При столь резких и частых изменениях вращающего момента на валу двигателя применение последнего в системе электропривода представлялось малоперспективным.
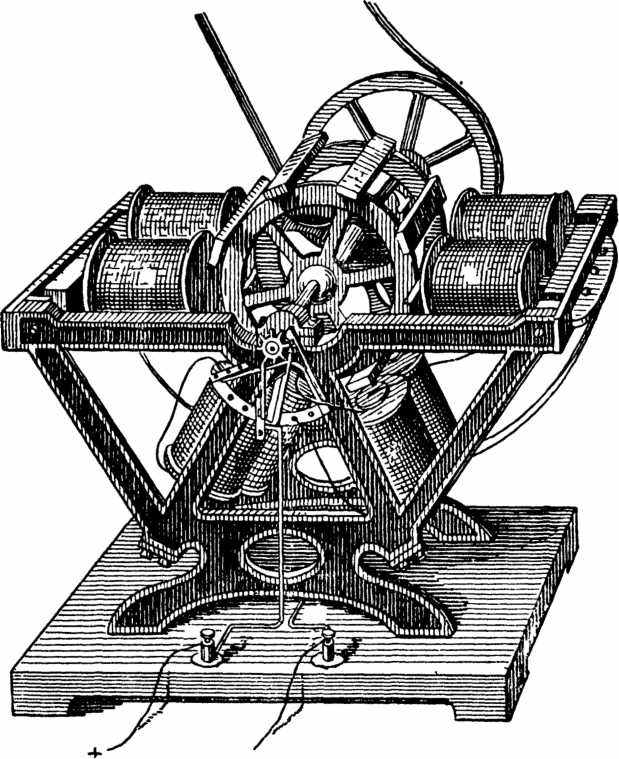
Рис. 2.14. Общий вид двигателя Фромана
Третий этап в развитии электродвигателей характеризовался разработкой конструкций электродвигателей с кольцевым якорем и практически постоянным вращающим моментом. Первый шаг в этом принципиально новом направлении был сделан молодым итальянским ученым, впоследствии профессором физики Болонского и Пизанского университетов, Антонио Пачинотти.
Электродвигатель Пачинотти (1860 г.) состоял из якоря кольцеобразной формы, вращавшегося в магнитном поле электромагнитов. Этот электродвигатель показан на рис. 2.17. Якорь, имеющий форму стального кольца с зубцами (наличие зубцов уменьшало магнитное рассеяние и облегчало размещение обмотки) и латунными спицами, укреплялся на вертикальном валу. На кольцо между зубцами якоря наматывались катушки 3, концы которых подводились к пластинам расположенного на нижней части вала коллектора. Подвод тока к пластинам коллектора осуществлялся роликами.
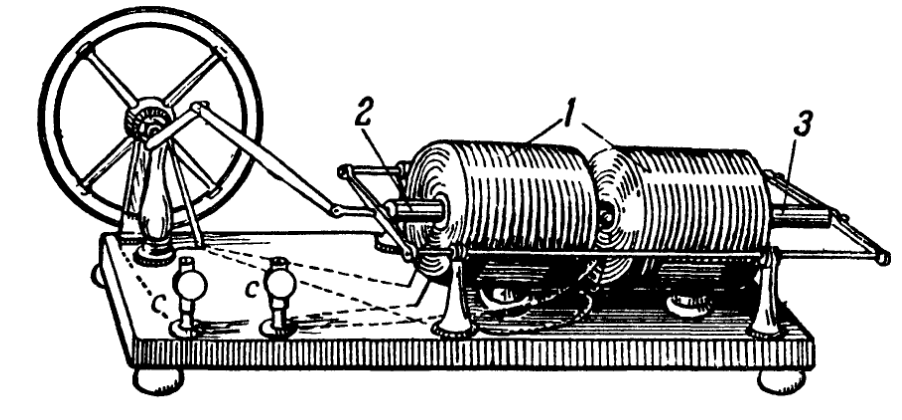
Рис. 2.15. Электродвигатель Пейджа: 1 – катушки электромагнитов; 2 и 3 – стальные сердечники
Обмотка электромагнитов 7, снабженных полюсными наконечниками 2 включалась последовательно с обмоткой якоря, т. е. согласно современной терминологии машина имела последовательное возбуждение.
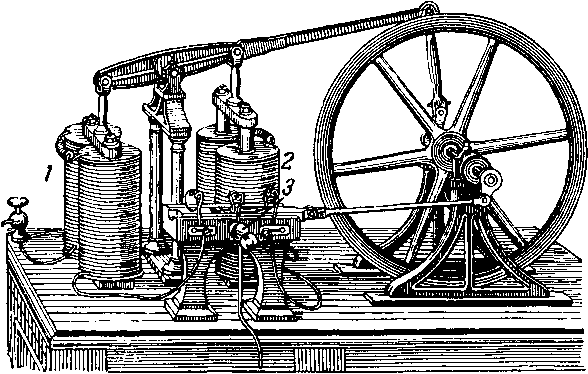
Рис. 2.16. Электродвигатель Бурбуза: 1 и 2 – катушки электромагнитов с втягивающимися сердечниками; 3 – переключатель
В электродвигателе Пачинотти получался практически постоянный по величине вращающий момент; габариты этого электродвигателя были невелики по сравнению с другими электродвигателями равной мощности. Основное значение работы Пачинотти состоит в том, что был сделан дальнейший и притом весьма важный шаг на пути построения современной машины постоянного тока: кольцевой зубчатый якорь, удобная схема возбуждения и коллектор, по существу говоря, современного типа. Любопытно также отметить, что Пачинотти указал на возможность обращения своего двигателя в генератор. Однако, не зная о возможности самовозбуждения машины, Пачинотти рекомендовал для использования машины в качестве генератора заменить электромагниты постоянными магнитами.
В 1863 т. Пачинотти опубликовал сведения о конструкции своего электродвигателя, но на эту публикацию не было обращено внимания, и изобретение было забыто.
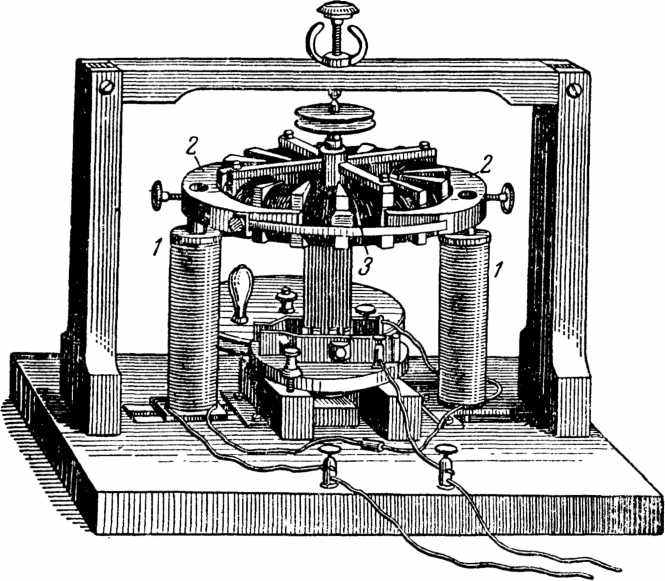
Рис. 2.17. Электродвигатель Пачинотти
Несмотря на большой интерес с принципиальной точки зрения, оно не получило распространения, так как основные потребности промышленности в механической энергии в 60-х годах XIX века вполне еще удовлетворялись паровым двигателем, тем более, что, как уже отмечалось, в то время все еще не было экономичного генератора электрической энергии. Идея кольцевого якоря была возрождена примерно через 10 лет 3. Т. Граммом в конструкции электромашинного генератора.
2.6. Основные этапы развития электрохимических источников тока
Из рассмотрения истории электродвигателя видно, что его развитие опережало на начальных этапах развитие генератора. Отсутствие хорошего, экономичного генератора электрического тока тормозило развитие практических применений электричества. Примерно до 1870 г. наиболее распространенными источниками тока были электрохимические, т. е. гальванические, элементы и аккумуляторы. В дальнейшем, по мере развития электротехники преобладающим типом источников электрического тока стали электромашинные генераторы.
В гальванических элементах химическая энергия превращается в электрическую, и эта последняя выводится во внешнюю цепь для использования. Простейшими гальваническими элементами были элементы с одной жидкостью; к числу таких элементов принадлежали вольтов столб и его видоизменения (батареи Крейкшенка, Волластона), чашечный элемент Вольты и др. Всем таким генераторам тока были свойственны недостатки, усложнявшие их применение, а следовательно, и развитие практических приложений электричества на базе таких генераторов. К числу наиболее существенных недостатков следует отнести: неудобство эксплуатации, неприспособленность батарей для транспортировки и сравнительно быстрое ослабление действия этих батарей вследствие гальванической поляризации. В