
Методические указания предназначены для студентов специальности "Электропривод и автоматизация промышленных установок"
| Вид материала | Методические указания |
- Методические рекомендации и указания по изучению дисциплины Автоматизированный электропривод, 70.72kb.
- Методические указания к выполнению расчётно графической работы №1 для студентов специальности, 243.93kb.
- План час. Сроки контроля Для студентов специальности 140604. 65 «Электропривод и автоматика, 154.73kb.
- Т. В. Фёдоров методические указания по технологической практике студентов IV курса, 107.4kb.
- Методические указания для выполнения лабораторных работ Новосибирск 2009, 437.08kb.
- Физические основы электроники, 499.24kb.
- Методические указания к проведению практических занятий по курсу «Архитектура гражданских, 272.14kb.
- Рабочая программа учебной дисциплины ф тпу 1-21/01 Федеральное агентство по образованию, 350.51kb.
- Электропривод и автоматика промышленных установок и технологических комплексов, 153.11kb.
- Методические указания к практическим занятиям и самостоятельной работе студентов Омск-2009, 848.08kb.
Система уравнений /6/ содержит три неизвестных. Поэтому одним из параметров регулятора можно задаться произвольно. Обычно задаются величиной емкости СТ, которую принимают равной 0,5...2 мкФ. Тогда из первого уравнения системы /6/ можно определить сопротивление в цепи обратной связи

Для нахождения значения сопротивления Rз.Т., подключенного ко входу УПТ, необходимо вначале определить коэффициент передачи обратной связи по току КТ.
4.1.5.3.2. Коэффициент передачи обратной связи по току КТ.
Как следует из структурной схемы контура тока /см.рис.5/ и выражения
для передаточной функции регулятора тока /2/, в установившемся режиме выполняется условие *

где Uз.Т. - напряжение задания тока; UОСТ - приведенное к цепи задающего сигнала напряжение обратной связи по току.
Условие /8/ выполняется в установившемся режиме вследствие того, что РТ содержит интегральную составляющую /т.е. осуществляет интегрирование результирующего входного сигнала/. Это условие достаточно
точно выполняется и в переходных режимах благодаря высокому быстродействию контура тока, что обусловлено малыми результирующими постоянными времени оптимизированного контура /см. /3/.
С учетом /8/, как следует из структурной схемы на рис.5 коэффициент обратной связи по току

КТ определяют исходя из требуемого значения максимального тока, якоря Iмакс.
Обычно Iмакс должен удовлетворять условию Iмакс ≤ Iдоп,
где Iдоп – кратковременно допустимый/по условиям коммутации/ ток двигателя /берется по каталогу/. Для двигателей общепромышленного назначения Iдоп≈2,5Iн. Если от привода требуеться высокое быстродействие и приводимый механизм не накладывает ограничений на величины ускорений и ускорений и замедлений, то Iмакс следует принимать равным Iдоп.
Для расчета КТ - необходимо задаться также значением
максимального напряжения задания тока UЗТмакс ,которому будет соответ
ствовать Iмакс.
Поскольку УНТ, используемые в элементах унифицированной блочной
системы регуляторов /УБОР/ для построения регуляторов, имеют рабочий
диапазон изменения выходного напряжения ±24 В и UЗТ представляет
собой выходное напряжение регулятора скорости, то UЗТмакс
должно удовлетворять условию UЗТмакс ≤ 24 В.
В последние годы широкое распространение получила практика построения регуляторов на базе операционных усилителей в интегральном исполнении, т.е. в виде отдельных микросхем. Для подобных регуляторов
рабочий диапазон выходного напряжения, как правило, составляет ±10 В
и соответствующее условие для максимального выходного напряжения PC/ UЗТмакс / имеет вид UЗТмакс ≤ 10 В. Практически UЗТмакс целесообразно принимать 15...24 В - при использовании элементов УБСР либо 8... 10 В - при выполнении регуляторов в интегральном исполнении; тогда КТ можно определить по формуле

 Сопротивление Rзт регулятора тока определяются по второму
Сопротивление Rзт регулятора тока определяются по второмууравнению системы /6/
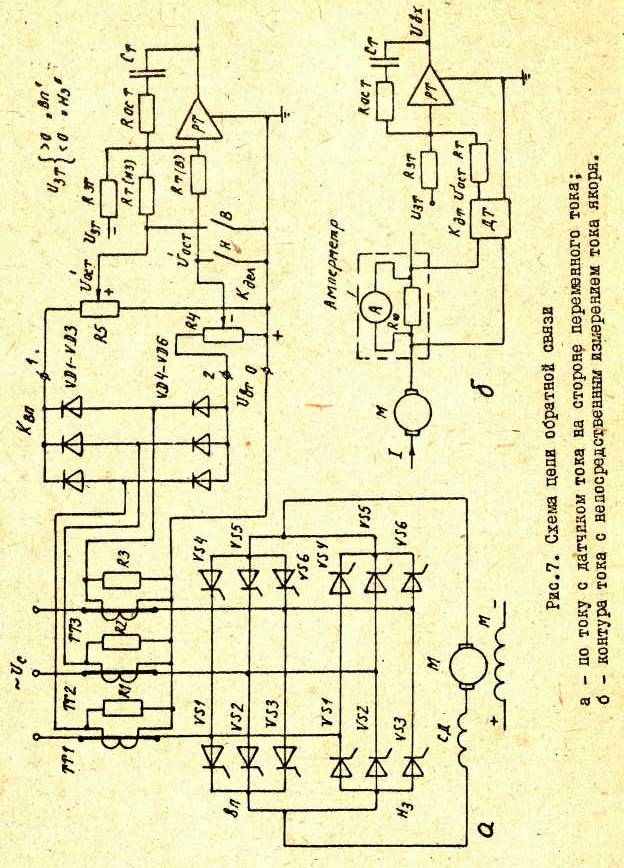
4.1.5.3.3. Расчет цепи обратной связи по току. Электрические схемы цепи обратной связи по току изображены на рис.7.
Схема на рис.7.6 является типичной для CПP, построенных на базе УБСР. Она характеризуется непосредственным измерением тока якоря и наличием дополнительного усилителя ДТ с гальваническим разделением входной и выходной цепей.
Схема на рис.7,а стала широко применяться в последнее время в СПР с интегральным исполнением регуляторов. Она характеризуется косвенным измерением тока якоря с помощью трансформаторов тока на входе силового вентильного блока, что является ее недостатком. Однако использование трансформаторов тока обеспечивает гальваническую развязку силовой цепи и цепей управления, а также позволяет обойтись без промежуточного усилителя. В то же время требуется некоторое усложнение схемы в случае реверсивных ТП, так как выходной сигнал трансформатора тока нечувствителен к направлению тока в якоре. Учет направления, тока якоря, который должен определять полярность напряжения обратной связи по току, достигается с помощью попеременного замыкания контактов В и Н и подачи на вход РТ двух сформированных напряжений обратной связи, равных по значению и противоположных по знаку.
Рассмотрим каждую из схем более детально. В схеме на рис.7,б использованы следующие обозначения: Rш - сопротивление шунта амперметра: ДТ – датчик тока, элемент УБСР, выполненный на база УПТ;
U`ост - фактическое напряжение обратной связи по току, поступающее на вход РТ. В общем случае U`ост отличается от Uост на рис.5.
Приведение фактического напряжения обратной связи по току к цепи задания тока осуществляется из условия сохранения неизменным тока обратной связи iост во входной цепи УПТ. Тогда, пренебрегая внутренним входным сопротивлением УПТ, с учетом рис.5 и 6 можно записать:
откуда приведенное напряжение обратной связи по току
На основании рис.7,б U`ост можно выразить через ток якоря

 где
где соответственно номинальное напря–
жение и номинальный ток шунта /стандартные шунты имеют
UШн = 75 мВ/; Кш - коэффициент усиления датчика тока, Кдт= 200 или 400 в зависимости от используемого входа; ДТ имеет два входа для подключения шунтов с различными параметрами.
Тогда выражение для КТ согласно /9/ с учетом /12/ и /13/ примет вид
При выборе шунта и коэффициента датчика тока Кдт следует
помнить, что напряжение на выходе датчика тока не должно превосходить
24 В, т.е. должно выполняться условие

Из выражения /14/ можно определить
В схеме на рис.7,а использованы следующие обозначения: TT1-TT3 -
трансформаторы тока; VD1 – VD3 и VD4 - VD6 - два трехфазных
выпрямителя с нулевым выводом; R4 , R5 - подстроечные делители;
В, Н - контакты реле, которые служат для реализации отрицательной
обратной связи по току при любой полярности напряжения задания тока
Uз.Т. на входе РT; U`ос.Т – фактическое напряжение обратной связи
по току.
Как следует из рис.7,а U`ос.Т можно выразить через ток якоря следующей зависимостью
где КТТ - коэффициент пропорциональности между напряжением на вторичной обмотке трансформатора тока UТТ и током якоря I, КТТ приближенно можно определить, если принять, что резисторы R1-R3 подобраны так, что два максимальном значении тока якоря, равном I٭стоп,
U
 ТТ=10 В, тогда
ТТ=10 В, тогда Iн– номинальный ток двигателя;
КВП - коэффициент схемы выпрямления для катодной группы
VD1 – VD3 /либо анодной группы VD4 - VD6/, КВП = 1,17;
Кдел – коэффициент делителя, выполненного на резисторе R4/R5/, Кдел обычно выбирается иа условия 0,50 ≤ Кдел ≤0,9.
Тогда выражение для КТ согласно /9/ о учетом /12/ и /16/ примет вид
Таким образом, используя приведенные формулы, могут быть определены все параметры регулятора тока: CТ, Rост, RзТ и RТ.
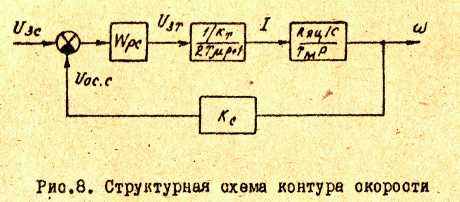
4.1.5.4. Расчет параметров контура скорости /при настройке регулятора скорости по модульному оптимуму и отсутствии фильтра в цепи обратной связи/. Оптимизированный контур тока может быть представлен приближенно апериодическим звеном первого порядка /4/. Тогда структурная схема контура скорости с учетом рис.5 будет иметь вид, изображенный на рис.8.
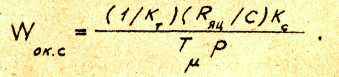
Передаточная функция элементов контура, действие которых должен компенсировать регулятор скорости PC
Передаточная функция, регулятора скорости при наотройке на модульный оптимум
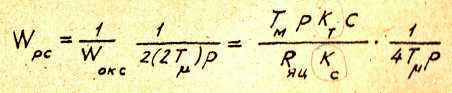
или окончательно
где Крс - коэффициент усиления П-регулятора скорости.
После подстановки Wрс из /16/ и сокращений получим
Передаточная функция оптимизированного контура скорости в разомкнутом состоянии
Как видно из последнего выражения /аналогично контуру тока/, динамические характеристики замкнутого контура-скорости не зависят от электромеханической постоянной времени Т и коэффициента, обратной связи по скорости Кс, так как регулятор скорости полностью компенсирует эти параметры.
Передаточная функция замкнутого контура скорости

4.1.5.4.1. Коэффициент передачи обратной связи по скорости Кс определяют исходя из получения максимальной рабочей скорости привода ωм при заданной нагрузке Iр, задаваясь значением максимального напряжения задания скорости UЗСмакс. При выполнении курсового проекта можно принять ωм =ωн - в случае СПР с однозонным регулированием или ωм= ωн D2 - в случае СПР с двухзоным регулированием, где D2- диапазон регулирования скорости во второй зоне /по каналу возбуждения/; Iр=Iн.
При выборе UЗСмакс необходимо учитывать, что, если напряжение задания скорости формируется с помощью задатчика интенсивности, являющегося элементом УБСР, то должно удовлетворяться условие UЗСмаксм ≤ 24 В. Обычно UЗСмакс выбирают равным 15…24 В - в случае реализации СПР на базе элементов УБСР и 5...10 В - при реализации системы на базе интегральных микросхем.
На основании структурной схемы на рис.5 можно записать равенство
Для установившегося режима работы привода UЗТ =I КТ. Тогда выражение для UЗС принимает вид
подставляя в последнее выражение Wрс из /18/ и разрешая полученное уравнение относительно Кс, получаем окончательное выражение
Подставив в /20/ UЗС = UЗСмакс,ω=ωм, и I=Iн можно определить Кс для случая СПР с однозонным регулированием. Анализ /20/ показывает, что в частном случае, когда задано значение максимальной скорости при нулевом токе нагрузки, формула упрощается
Формулой /21/ следует пользоваться в случае СПР с двухзонным регулированием. Ею часто пользуются при практических расчетах и в случае СПР с однозонным регулированием при нагрузке, отличной от 0 /Ic≠0/, пренебрегая вторым слагаемым в знаменателе формулы /20/, так как обычно

4.1.5.4.2. Передаточная функция регулятора скорости /16/ соответствует пропорциональному регулятору и может быть реализована с помощью схемы на базе УПТ, изображенной на рис.9.
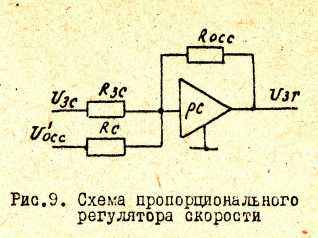
На приведенной схеме: U`осс– фактическое напряжение обратной связи по скорости.
Передаточная функция схемы регулятора на рис.9 /без учета инвертирования знака подводимого напряжения/ ищет вид
Из сравнения выражений /18/ и /22/ следует, что схема на рис.9 реализует требуемую передаточную функцию PC, если правые части /18/ и /22/ равны, тогда
Задавшись RЗС , из /23/ можно определить величину сопротивления в цепи обратной связи RОС.С. При выборе RЗС необходимо учитывать, что допустимая сила тока во входной цепи PC не должна превышать 10 мА /это справедливо для системы, построенной на базе элементов УБСР/. Поэтому RЗС должно удовлетворять условию

4
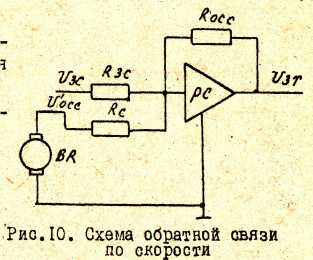
 .1.5.4.3. Расчет цепи обратной связи по скорости. В простейшем случае электрическая схема цепи обратной связи по скорости имеет вид, изображенный на рис.10.
.1.5.4.3. Расчет цепи обратной связи по скорости. В простейшем случае электрическая схема цепи обратной связи по скорости имеет вид, изображенный на рис.10.Вначале необходимо выбрать тахогенератор так, чтобы номинальная угловая скорость его ωТГН была больше или равна максимальной рабочей скорости двигателя ωМ, т.е. чтобы выполнялось условие
После выбора тахогенератора следует рассчитать сопротивление RС , подключенное ко входу PC. При этом необходимо руководствоваться следующими соображениями:
а/ фактическое напряжение обратной связи U`ОСС , как видно из рис.10, можно записать так

где КТГ - коэффициент передачи тахогенератора,

б/ напряжение обратной связи по скорости, приведенное к цепи задания скорости,
Приведение осуществляется из условия сохранения неизменным тока обратной связи во входной цепи УПТ PC. Последнее выражение с учетом /25/ принимает вид

в
 / как следует из структурной схемы на рис.5
/ как следует из структурной схемы на рис.5с учетом (26)
г/ разрешая последнее уравнение относительно RС, получим

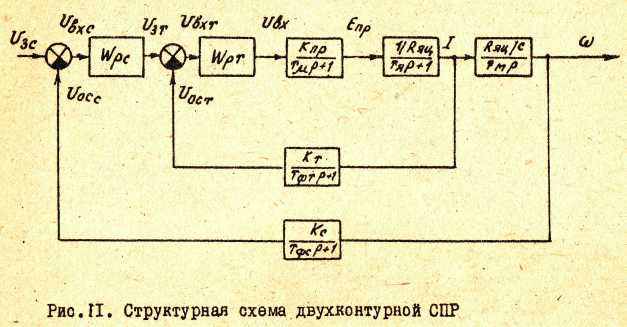
4.1.6. Особенности расчета регуляторов двухконтурной СПР с
П-регулятором скорости при наличии фильтров в цепях обратной связи. Математическое описание объекта остается неизменным /см.рис.4/, поэтому структурная схема подобной СПР может быть представлена как изображено на рис.11.
Наличие фильтра /т.е. апериодического звена первого порядка в цепи обратной связи по току приводит к изменению оптимальной постоянной интегрирования регулятора тока и изменению вида результирующей передаточной функции оптимизированного замкнутого контура тока. Новое выражение для этой передаточной функции совместно с фильтром в цепи
обратной связи по скорости обусловливают изменение выражения для определения коэффициента усиления регулятора скорости. Рассмотрим эти отличия более детально.
4.1.6.1. Расчет контура тока при наличии фильтра в цепи обратной связи. Передаточная функция РТ при настройке на модульный оптимум с учетом фильтра в цепи обратной связи
г

 де Wокт - то же, что и без фильтра /см. п.4.1.5.3/; ТОТ -оптимизированная постоянная интегрирования разомкнутого контура тока при настройке на модульный оптимум,
де Wокт - то же, что и без фильтра /см. п.4.1.5.3/; ТОТ -оптимизированная постоянная интегрирования разомкнутого контура тока при настройке на модульный оптимум,На практике часто выбирают
П
 ри подстановке WОКТ в формулу для WРТ получаем
ри подстановке WОКТ в формулу для WРТ получаемг
 де Тu с учетом /28/ составляет
де Тu с учетом /28/ составляетТаким образом, из сопоставления /2/ и /29/ видно, что введение фильтра с достоянной ТФТ в цепь обратной связи увеличивает постоянную интегрирования регулятора тока.
На основании структурной схемы рис.11 и выражения /29/ можно получить передаточную функцию оптимизированного контура тока в замкнутом состоянии

Если в выражений /30/ пренебречь в знаменателе членами при старших степенях р , поскольку эти члены представляют собой произведение малых постоянных, то получим