
Методические указания для выполнения лабораторных работ Новосибирск 2009
| Вид материала | Методические указания |
- Методические указания к выполнению лабораторных работ по дисциплине «Интеллектуальные, 653.36kb.
- Методические указания к проведению лабораторных работ. Специальность 23. 01. 02 «Автоматизированные, 1178.37kb.
- План выпуска учебной литературы на 2011, 621.33kb.
- Методические указания к выполнению лабораторных работ для студентов, обучающихся, 99.32kb.
- Методические указания по проведению лабораторных работ с использованием, 439.55kb.
- Выписка из рабочей программы и методические указания к выполнению лабораторных работ, 347.39kb.
- Методические указания для ее выполнения по дисциплине «финансы» 2008-2009 уч. Год (для, 247.31kb.
- Методические указания к выполнению лабораторных работ по курсу «вычислительная техника, 640.55kb.
- Методические указания для выполнения контрольных работ по курсу «Философия», 811.41kb.
- Рабочая программа, методические указания по выполнению курсовой работы, темы курсовых, 1694.43kb.
СИБИРСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
ПУТЕЙ СООБЩЕНИЯ (СГУПС)
РЕГУЛЯТОРЫ
Методические указания для выполнения лабораторных работ
Новосибирск 2009
УДК 681.515.
Регуляторы. Методические указания к проведению лабораторных работ. / Сост. В.А. Слайковская, Е.С. Тенитилов.- Новосибирск: Изд-во СГУПСа, 2009.-
Методические указания к лабораторным работам по регуляторам, выполняемые на стендах с электронным управлением, содержат инструкции по работе с измерительными приборами, краткий теоретический материал и инструкции по выполнению. Данные методические указания предназначены для студентов специальностей М, ВВ, МС при изучении дисциплин «Управление техническими системами», «Автоматизация систем водоснабжения и водоотведения», «Автоматизация строительных, дорожных и путевых машин» и выполнены на основе учебно-методического пособия фирмы «hps SystemTechnik».
Методические указания рассмотрены и утверждены к печати на заседании кафедры «Электротехника, диагностика и сертификация»
Ответственный редактор канд.тех.наук, доц. Лесных Е. В.
Рецензент: Жаров А.В., к.т.н., доцент кафедры «Информационные системы»
ФГОУ ВПО «Новосибирская государственная академия водного транспорта».
© Слайковская В. А., Тенитилов Е. С. 2009
© Сибирский государственный университет путей сообщения, 2009
Введение
Регуляторы широко применяются для создания локальных систем регулирования различных технологических параметров, являясь неотъемлемой частью системы автоматического регулирования (САР). Настройка регулятора должна обеспечивать определенный запас устойчивости системы автоматического регулирования и надлежащее качество регулирования.
При подготовке к лабораторной работе необходимо изучить особенности применения каждого типа регулятора с учетом характера протекания технологического процесса, особенностей работы объекта.
Лабораторные работы по теме «Регуляторы» предусматривают изучение характеристик регулирующих блоков на моделях, имитирующих поведение реальных промышленных регуляторов.
Реальный регулятор имеет следующие функциональные блоки (устройства): измерительное, задающее, сравнивающее, управляющее, исполнительное. Исследуемая модель регулятора имитирует действие управляющего (собственно регулирующего) блока, в котором задаются параметры регулятора, формирующие закон регулирования.
В качестве входных воздействий используются сигналы различной формы и уровня, генерируемые блоком «Генератор».
При подготовке к защите лабораторных работ необходимо сделать выводы по каждому проведенному эксперименту, ответить на контрольные вопросы, приведенные в методическом указании к каждой работе.
Отчет по выполненной работе составляется в соответствии с приложением А.
1 Лабораторная работа № Р1
Исследование пропорционального (П) регулятора
Цель работы: исследование свойств пропорционального (П) регулятора
1.1 Теоретическая часть
Задачей П-регулятора является поддержание нулевого значения потенциального сигнала рассогласования, поступающего на его вход с компаратора, с максимально возможным быстродействием. Этот критерий является ключевым при выборе П-регулятора для решения определенной задачи. Выходной сигнал Uy П-регулятора, как следует из его названия, пропорционален входному сигналу Ui и является выходным сигналом для регулятора и одновременно управляющим (входным) для объекта регулирования. Следовательно, сигнал на выходе регулятора может появиться только при наличии сигнала на его входе. Поэтому для получения отличного от нуля значения управляющей переменной на выходе необходимо наличие ненулевого сигнала на входе. Входной сигнал регулятора в лабораторной установке эквивалентен сигналу рассогласования системы автоматического регулирования (САР). При этом даже при наличии сигнала рассогласования П-регулятор можно использовать только при высоком усилении, гарантирующем низкую ошибку регулирования. Однако высокое усиление в регулирующей цепи повышает опасность возникновения автоколебаний.
Основными областями применения П-регуляторов являются системы позиционирования в станках с числовым программным управлением (ЧПУ), системы управления наполнением и т. п. Такие системы всегда характеризуются пропорциональным действием и при этом значение выходной переменной, например, положение суппорта с инструментом, в них сохраняется, даже если управляющая переменная (выходной сигнал регулятора) становится равной нулю (т. е. если сигнал рассогласования на входе регулятора также принимает нулевое значение).
Параметр П-регулятора – коэффициент передачи (или коэффициент пропорционального действия) KP – определяется согласно переходной характеристике (в установившемся состоянии, рисунок 1.1) по формуле
KP = Uy/Ui (1.1)
Рисунок 1.1 – Переходная характеристика П - регулятора
1.2 Коэффициент передачи П - регулятора
Соберите регулирующую цепь для получения переходной характеристики, представленную на рисунке 1.2. Запустите программу «USB Осциллограф». На панели управления осциллографом, как показано на рисунке 1.4, установите настройки:
- по каналу A и B установите масштаб развертки 8 В;
- регулятором «период» установите значение 40 мкс;
- включите синхронизацию сигнала по каналу А.
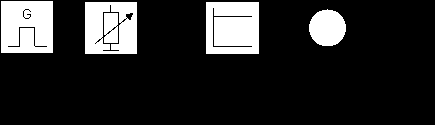
Рисунок 1.2 - Схема регулирующей цепи
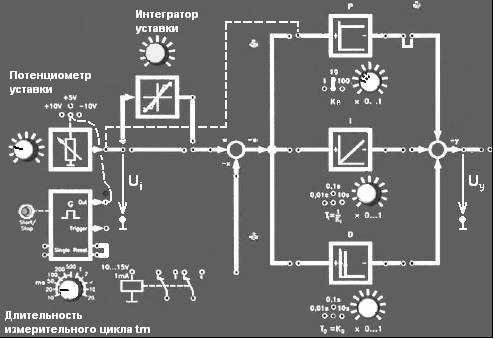
Рисунок 1.3 - Регулирующая цепь пропорционального регулятора на панели «Регуляторы»

Рисунок 1.4 - Панель управления осциллографом
Компаратор, включенный последовательно с регулятором, преобразует выходной сигнал регулятора таким образом, чтобы все значения напряжения на экране осциллографа были положительными.
Обратите внимание: при выполнении эксперимента в гнезда «Сброс» блока «Длительность измерительного цикла» должна быть вставлена перемычка, а гнезда «Одн.» должны быть свободны!
Задайте следующие настройки для проведения отдельных измерений (таблица 1.1).
Таблица 1.1 – Параметры настройки П - регулятора
| Номер измерения | 1 | 2 | 3 |
| Длительность измерительного цикла tm | 20 мс | ||
| Входной сигнал Ui | 1,5 В | ||
| Коэффициент передачи KP | 2 | 4 | 6 |
| Управляющая переменная Uy | | | |
| Расчетный коэффициент передачи KP= Uy/Ui | | | |
Коэффициент передачи KP устанавливается при помощи потенциометра пропорционального блока, входное напряжение Ui регулируется при помощи «потенциометра уставки», длительность измерительного цикла устанавливается при помощи потенциометра «длительность измерительного цикла» на панели ПИД.
Постройте кривые отклика на ступенчатое воздействие при настройках, указанных в таблице 1.1, и перенесите полученные зависимости на лист решений. Определите значения соответствующих параметров по осциллограммам и запишите их в таблицу 1.1.
| И
змерение Входной сигнал Ui: 1 В/дел. Управляющая переменная (выходной сигнал) Uy1: 1 В/дел. Uy2: 1 В/дел. Uy3: 1 В/дел. – 0 t = 1 мс/дел. |
Рисунок 1.5 - Лист решений (переходные кривые П – регулятора)
Контрольные вопросы
- Укажите параметры настройки П - регулятора.
- Проведите анализ изменения выходного параметра П - регулятора.
- Укажите условия применения П - регулятора.
- Как П – регулятор реагирует на изменение входного сигнала? Выходной сигнал П – регулятора изменяется очень медленно и имеет задержку или изменяется соответственно изменениям входного сигнала при скачке напряжения на входе?
- Как изменяется напряжение на выходе П – регулятора, когда напряжение на входе становится равным нулю после подачи ступенчатого входного сигнала?
- П – регулятор имеет настраиваемый коэффициент передачи KP в диапазоне значений от 4 до 50. Какое входное напряжение требуется для того, чтобы напряжение на выходе П – регулятора составляло +3 В?
2 Лабораторная работа № Р2
Исследование пропорционально - интегрального (ПИ) регулятора
Цель работы: исследование свойств пропорционально-интегрального (ПИ) регулятора
2.1 Теоретическая часть
Действие интегрирующего элемента в регулирующей цепи может быть интерпретировано как действие запоминания. Например, уровень воды в дождевой бочке «запоминает», сколько воды было долито или слито из бочки. Объем воды, поступающей в бочку с каждым прошедшим дождем, «интегрируется» бочкой, что приводит к повышению уровня воды. А когда дождь заканчивается, это не означает, что уровень воды в бочке возвращается к нулевой отметке.
Аналогичным образом осуществляется рабочий процесс привода подачи в станке с ЧПУ. Импульс напряжения на входе исполнительного двигателя приводит к перемещению суппорта в определенную позицию, в которой он остается и после снятия напряжения на входе. Поэтому регулятор, управляющий этим двигателем, не нуждается в поддержании определенного уровня выходного напряжения для обеспечения постоянного значения регулируемой переменной (позиции суппорта). Регулятор лишь поддерживает значение управляющей переменной на определенном уровне, пока позиция суппорта отличается от заданной.
Рисунок 2.1 - Переходная характеристика ПИ-регулятора и входное воздействие
Взаимосвязи в системе управления скоростью совершенно другие. В качестве управляющей переменной здесь также выступает напряжение на входе исполнительного двигателя, а регулируемой переменной является частота вращения двигателя. Пропорциональное действие в такой системе в большей степени означает, что частота вращения остается постоянной до тех пор, пока значение управляющей переменной остается на постоянном уровне. Если управляющая переменная (входное напряжение) снимается, частота вращения также падает до нуля. Т. е. рассматриваемая система не обладает эффектом памяти.
При управлении подобным объектом таким образом, чтобы действительное значение регулируемой переменной было равно значению задающей переменной, т. е. чтобы не было рассогласования, необходима реализация в системе «функции памяти», т. к. управляющая переменная на входе объекта управления должна сохраняться. Это обеспечивается ПИ-регулятором. На рисунке 2.1 иллюстрируется, как должна определяться переходная характеристика ПИ-регулятора.
Коэффициент передачи (или коэффициент пропорционального действия, или коэффициент усиления) в момент подачи единичного входного воздействия:
KP = Uy/Ui
При ступенчатом входном воздействии пропорциональное действие приводит к скачку выходного напряжения, регулятор сначала реагирует очень быстро. Благодаря интегрирующему действию затем имеет место линейный рост выходного напряжения со скоростью vI = ΔUy/Δt.
Коэффициент интегрирующего действия KI определяет, как быстро изменяется выходное напряжение при изменении входного напряжения Ui на 1 В:
KI = vI/Ui .
Коэффициент интегрирующего действия часто называют интегральным усилением. Чем больше значение KI, тем быстрее возрастает выходное напряжение и тем точнее работает регулятор.
Переменная, связывающая между собой величины KI и KP, называется временем интегрирующего действия и обозначается Tn. Эта переменная необходима регулятору для обеспечения того же самого отклонения напряжения на выходе с интегрирующей составляющей, которое было сгенерировано пропорциональной составляющей в момент скачка напряжения на входе. Графическая иллюстрация сказанного представлена на рисунке 2.1. Время интегрирующего действия определяется по следующей формуле:
Tn = KP/KI .
Короткое время интегрирующего действия Tn для ПИ-регулятора означает, что коэффициент интегрирующего действия KI значительно больше коэффициента усиления KP.
2.2 Время интегрирующего действия, коэффициент интегрирующего действия и коэффициент передачи ПИ-регулятора
Соберите регулирующую цепь, представленную на рисунке 2.2, для получения переходной характеристики. Цепь составлена таким образом, что входное (Ui) и выходное (Uy) напряжения, а также управляющее напряжение имеют одинаковую полярность.
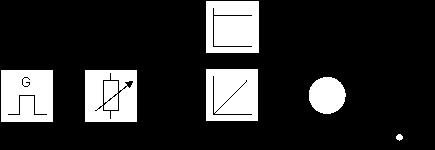
Рисунок 2.2 - Схема регулирующей цепи
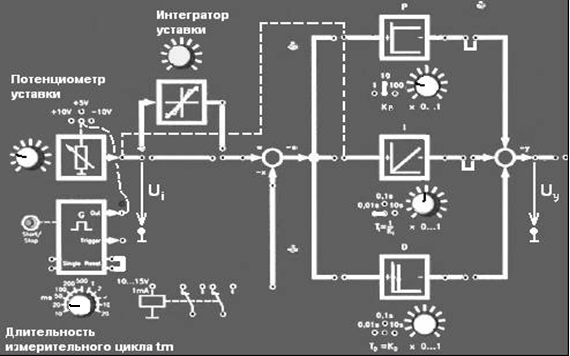
Рисунок 2.3 - Регулирующая цепь
Рисунок 2.4 - Панель управления осциллографом
Компаратор, включенный последовательно с регулятором, преобразует выходной сигнал регулятора таким образом, чтобы все значения напряжения на экране осциллографа были положительными.
Обратите внимание: при выполнении эксперимента в гнезда «Сброс» должна быть вставлена перемычка, а гнезда «Одн.» должны быть свободны!
Задайте следующие настройки для проведения отдельных измерений (таблица 2.1).
| | |||
| Таблица 2.1- Параметры настройки регулятора | |||
| Номер измерения | 1 | 2 | 3 |
| Длительность измерительного цикла tm | 20 мс | ||
| Скачок напряжения Ui | 1,5 В | ||
| Коэффициент передачи KP | 2 | 2 | 5 |
| Время интегрирования TI | 5 мс | 10 мс | 10 мс |
Постройте кривые отклика на ступенчатое воздействие при настройках, указанных в таблице 2.1, и перенесите полученные зависимости на лист решений. Определите значения соответствующих параметров по осциллограммам и запишите их в таблицу решений (таблицу 2.2.).
Результаты эксперимента: Время интегрирующего действия, коэффициент интегрирующего действия и коэффициент передачи ПИ-регулятора.
| И
змерение №1, 2, 3 Входной сигнал Ui: 1 В/дел. Управляющая переменная Uy1: 1 В/дел. Uy2: 1 В/дел. Uy3: 1 В/дел. t – 0 = 5 мс/дел. |
Рисунок 2.5 - Лист решений (переходные кривые ПИ-регулятора)
| Таблица 2.2 – Значения вычисленных параметров | |||
| | |||
| Вычисления | |||
| Номер измерения | 1 | 2 | 3 |
| Коэффициент передачи KP | | | |
| Коэффициент интегрирующего действия KI | | | |
| Время интегрирующего действия Tn | | | |
Контрольные вопросы
- Из каких модулей состоит модель ПИ-регулятора?
- Назовите параметры настройки ПИ-регулятора.
- Проведите анализ изменения выходного параметра ПИ - регулятора. Укажите составляющую, обусловленную пропорциональным модулем, и составляющую, обусловленную интегральным модулем.
- Как реагирует ПИ-регулятор на скачок напряжения на входе? Опишите, как изменяется выходное напряжение ПИ-регулятора.
- Если импульс на входе ПИ-регулятора исчезает, выходное напряжение падает, но до ненулевого значения. Что определяет это значение?
- На приведенном ниже рисунке представлен возможный вид кривой рассогласования Ui на входе регулятора после скачка управляющей переменной: сначала рассогласование очень велико, затем регулятор формирует управляющее воздействие и сводит величину рассогласования к нулю. Изобразите кривую выходного напряжения П-регулятора с
Ui = 2 и кривую выходного напряжения ПИ – регулятора также с Ui = 2 и сравнительно большим временем интегрирующего действия.
Рисунок 2.6 – Кривая рассогласования
3
Лабораторная работа № Р-3
Исследование пропорционально-дифференциального (ПД) регулятора
Цель работы: исследование свойств пропорционально-дифференциального (ПД) регулятора
3.1 Теоретическая часть
Напряжение на выходе П-регулятора формируется только при наличии напряжения на его входе. Если входное напряжение П-регулятора падает до нуля, выходное напряжение также пропадает. Напряжение на выходе ПИ-регулятора увеличивается, пока действует напряжение на его входе. Даже при очень небольших значениях входного напряжения ПИ-регулятора выходное напряжение продолжает расти; рост выходного напряжения прекращается только после снятия входного напряжения. ПИ-регулятор является очень точным, но сравнительно медленным регулятором, т. к. процесс интегрирования требует определенных затрат времени. Если необходимо управлять инерционными объектами (например, нагревательной установкой), требуется регулятор, реагирующий, прежде всего на изменения входного напряжения. В качестве таких регуляторов применяют ПД- или ПИД-регуляторы. Они позволяют достаточно просто компенсировать начальную инерцию системы.
В ПД-регуляторе выходное напряжение зависит не только от величины входного напряжения, но и от скорости его изменения. Даже небольшие изменения сигнала рассогласования на входе ПД-регулятора приводят к появлению значительного выходного напряжения. Длительность интервала времени, в течение которого регуляторы с дифференцирующей составляющей компенсируют начальную инерцию системы, определяется областью дифференцирующего действия на переходной характеристике. На участке возрастания входного напряжения дифференцирующее действие может быть определено скачком амплитуды выходного напряжения в начале этого участка. Установившееся значение регулируемой переменной в системе с ПД-регулятором достигается раньше, чем в системе с П-регулятором, за счет интервала времени дифференцирующего действия. На рисунке 3.1 представлена переходная характеристика ПД-регулятора.
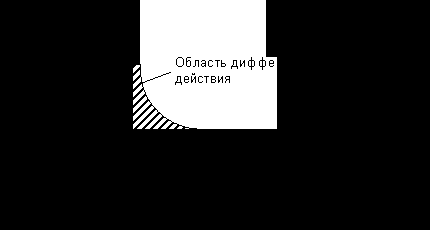
Рисунок 3.1 - Переходная характеристика ПД-регулятора
Коэффициент передачи KP ПД-регулятора определяется следующим отношением напряжений в установившемся состоянии:
KP = Uy/Ui .
Параметры дифференцирующей составляющей трудно определить из переходной характеристики, т. к. она всегда приводит к перегрузке (ограничению амплитуды выходного напряжения). Вместе с тем наличие области дифференцирующего действия дает возможность сравнить работу регуляторов с различными значениями параметров. На рисунке 3.2 иллюстрируется отклик ПД- и П-регулятора на линейно возрастающее входное напряжение.
Коэффициент дифференцирующего действия KD ПД-регулятора определяет значение выходного напряжения при изменении входного напряжения со скоростью 1 В/с:
KD =
 .
.
Рисунок 3.2 - Отклик ПД- и П-регулятора на линейно возрастающий входной сигнал
Время дифференцирующего действия Tv связывает между собой коэффициент пропорционального действия и коэффициент дифференцирующего действия:
Tv = KD/KP .
Малое время дифференцирующего действия и, соответственно, незначительная область дифференцирующего действия на переходной характеристике означают, что пропорциональная действие ПД-регулятора существенно больше его дифференцирующего действия.
За счет интервала времени дифференцирующего действия регулятор с дифференцирующей составляющей обладает большим быстродействием по сравнению с регулятором с одной только пропорциональной составляющей (см. рисунок 3.2).
3.2 Отклик ПД-регулятора на скачок напряжения и линейно возрастающее напряжение на входе
Соберите регулирующую цепь, представленную на рисунке 3.3

Рисунок 3.3 - Регулирующая цепь
Обратите внимание: при выполнении эксперимента в гнезда RESET должна быть вставлена перемычка, а гнезда SINGLE должны быть свободны!
Для исследования отклика на ступенчатое воздействие используется импульс напряжения, подаваемый на потенциометр уставки, а при исследовании отклика на линейно возрастающее напряжение (линейное воздействие) необходимо применять интегратор уставки.
| Задайте следующие настройки для проведения отдельных измерений (таблица 3.1). | ||||
| Таблица 3.1 – Параметры настройки регулятора | ||||
| Параметры | Отклик на ступенчатое воздействие | Отклик на линейное воздействие | ||
| Номер измерения | 1 | 2 | 3 | 4 |
| Регулятор | П | ПД | П | ПД |
| Длительность измерительного цикла tm | 20 мс | |||
| Интегратор уставки | — | Третья метка | ||
| Скачок напряжения Ui | 1 В | |||
| Коэффициент передачи KP | 4 | |||
| Время дифференцирования TD | — | 0,1 с, третья метка | — | 0,1 с, третья метка |
Постройте кривые отклика на ступенчатое и линейное воздействия при настройках, указанных в таблице 3.1, и перенесите полученные зависимости на лист решений. Определите значения соответствующих параметров по осциллограммам и запишите их в таблицу решений (таблица 3.2).
Результаты эксперимента: Отклик ПД-регулятора на скачок напряжения и линейно возрастающее напряжение на входе.
| | | | | | | | | | |
| | | | | | | | | | |
| | | | | | | | | | |
| | | | | | | | | | |
| | | | | | | | | | |
| | | | | | | | | | |
| | | | | | | | | | |
| | | | | | | | | | |
| Измерения №1 и №2ПД-регулятор: Управляющая переменная Uy2: 2 В/дел. П-регулятор: Управляющая переменная Uy1: 2 В/дел. – 0 Рассогласование Ui: 2 В/дел. t = 2 мс/дел. | |||||
| | |||||
| Рисунок 3.4 - Измерения №1 и №2 (переходная кривая) | |||||
| | | ||||
| Таблица 3.2 – Вычисленные параметры регулятора | | ||||
| Вычисления | | ||||
| Номер измерения | 1 | 2 | 3 | 4 | |
| Коэффициент передачи KP | | | | | |
| Коэффициент дифференцирующего действия KD | — | — | — | | |
| Время дифференцирующего действия Tv | — | — | — | | |
| Измерения №3 и №4
ПД-регулятор: Управляющая переменная Uy4: 1 В/дел. П-регулятор: Управляющая переменная Uy3: 1 В/дел. – 0 Рассогласование Ui: 1 В/дел. t = 2 мс/дел. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Рисунок 3.5 - Измерения №3 и №4 (реакция регулятора на линейно возрастающий сигнал) |
Анализ эксперимента: Отклик ПД-регулятора на скачок напряжения и линейно возрастающее напряжение на входе.
Контрольные вопросы:
1 Как реагирует ПД-регулятор на очень медленное изменение сигнала рассогласования на входе?
2 Как изменяется выходное напряжение ПД-регулятора, если сигнал рассогласования на его входе становится равным нулю?
3 Заштрихуйте область дифференцирующего действия на переходной характеристике ПД-регулятора (рисунок 3.2). Сравните область дифференцирующего действия ПД-регулятора с областью регулирования П-регулятора.
4 Сравните отклики П- и ПД-регулятора на линейно возрастающее напряжение на входе.
4 Лабораторная работа № Р4
Исследование пропорционально-интегрально-дифференциального (ПИД) регулятора
Цель работы: исследование свойств пропорционально-интегрально-дифференциального (ПИД) регулятора
4.1Теоретическая часть
ПИД-регулятор представляет собой универсальный регулятор, получивший наиболее широкое применение в промышленности, где приходится иметь дело с множеством физических величин, которые необходимо регулировать: температурой, давлением, высотой уровня, расходом и др. Существуют различные варианты структуры ПИД-регулятора (как и для других типов регуляторов). ПИД-регулятор на панели «Универсальный регулятор» представляет собой цепь из трех параллельно включенных отдельных регуляторов (П-, И- и Д-типа); выходные напряжения всех трех регуляторов складываются. Благодаря параллельному включению каждый регулятор может работать независимо от других. На практике регуляторы обычно строятся на базе одного или большего числа операционных усилителей, а пропорциональное, интегральное и дифференцирующее действия реализуются соответствующими обратными связями.
Действие каждой из трех составляющих ПИД-регулятора может быть задано средствами панели путем установки значений следующих величин:
- для П-составляющей – коэффициента передачи KP
- для И-составляющей – времени интегрирования TI
- для Д-составляющей – времени дифференцирования TD
Каждая из этих трех составляющих решает одну определенную задачу из выполняемых регулятором. Д-составляющая гарантирует быструю реакцию регулятора даже на незначительное изменение сигнала рассогласования на его входе. П-составляющая обеспечивает общее усиление, а И-составляющая – точность работы регулятора при отсутствии сигнала рассогласования. Выделить параметры отдельного регулятора из его отклика на ступенчатый или линейно возрастающий сигнал на входе трудно, поскольку действия всех трех составляющих частично перекрываются. Поэтому в проводимой далее серии измерений внимание будет сосредоточено на сравнительных наблюдениях.
4.2 Отклик ПИД-регулятора на скачок напряжения и линейно возрастающее напряжение на входе
Соберите регулирующую цепь, представленную на рисунке 4.1.
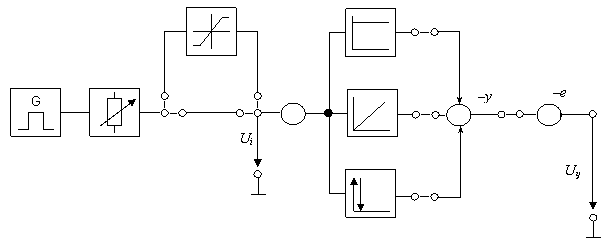
Рисунок 4.1- Регулирующая цепь
Обратите внимание: при выполнении эксперимента в гнезда RESET должна быть вставлена перемычка, а гнезда SINGLE должны быть свободны!
Для исследования отклика на ступенчатое воздействие используется импульс напряжения, подаваемый на потенциометр уставки, а при исследовании отклика на линейно возрастающее напряжение (линейное воздействие) необходимо применять интегратор уставки.
Задайте следующие настройки для проведения отдельных измерений (таблица 4.1).
| | Таблица 4.1 – Параметры настройки регулятора | |||||||
|---|---|---|---|---|---|---|---|---|
| Параметры | Отклик на ступенчатое воздействие | Отклик на линейное воздействие | | |||||
| Номер измерения | 1 | 2 | 3 | 4 | 5 | 6 | | |
| Регулятор | П | ПИ | ПИД | П | ПИ | ПИД | | |
| Длительность измерительного цикла tm | 20 мс | | ||||||
| Интегратор уставки | — | третья метка | | |||||
| Скачок напряжения Ui | 1 В | | ||||||
| Коэффициент передачи KP | 2 | 3 | 5 | 2 | 3 | 4 | | |
| Время интегрирования TI | — | 0,01 с, вторая метка | — | 0,01 с, вторая метка | | |||
| Время дифференцирования TD | — | 0,1 с, вторая метка | — | 0,1 с, вторая метка | | |||
Обратите внимание: для проведения измерений № 1,2,3 установите мышкой с помощью регуляторов на панели осциллографа границы по напряжению ±14В для обоих измерительных каналов А и В, а также регулятор «Период» в положение 30 мкс. Для проведения экспериментов 4,5,6 установите границы по напряжению ±6В для канала В, выберите синхронизацию по каналу В и установите измерительную метку данного канала на значение <0,5В (правая шкала экрана).
Постройте кривые отклика на ступенчатое и линейное воздействия при настройках, указанных в таблице 4.1, и перенесите полученные зависимости на лист решений. Определите значения соответствующих параметров по осциллограммам.
Результаты эксперимента: Отклик ПИД-регулятора на скачок напряжения и линейно возрастающее напряжение на входе.
| | | | | | | | | | |
| | | | | | | | | | |
| | | | | | | | | | |
| | | | | | | | | | |
| | | | | | | | | | |
| | | | | | | | | | |
| | | | | | | | | | |
| | | | | | | | | | |
| Измерения №1, №2 и №3 Отклик на единичный скачок: Управляющая переменная Uy3: 2 В/дел. Управляющая переменная Uy2: 2 В/дел. Управляющая переменная Uy1: 2 В/дел. Рассогласование Ui: 2 В/дел. t – 0 = 1 мс/дел. | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Рисунок 4.2 - Измерения №1, №2 и №3 (переходные кривые)
Рисунок 4.3 - Измерения №4, №5 и №6 (реакция регулятора на линейно возрастающий сигнал) Анализ эксперимента: Отклик ПИД-регулятора на скачок напряжения и линейно возрастающее напряжение на входе. Контрольные вопросы:
4. Опишите отклик ПИД-регулятора на единичный скачок напряжения на входе и сравните с откликом ПИ-регулятора на аналогичное воздействие. 5. Заштрихуйте область дифференцирующего действия на переходной характеристике ПИД-регулятора. Какова длительность временного интервала, в течение которого имеет место перегрузка регулятора? 6. Отклики ПИ- и ПИД-регулятора на линейный рост входного напряжения представляют собой прогрессивно нарастающие нелинейные кривые. Объясните причины. 7. На приведенном ниже рисунке представлен возможный вид реальной кривой рассогласования Ui на входе ПИД-регулятора После скачка уставки рассогласование очень велико, затем некоторое время оно остается близко к постоянному уровню, после чего сводится к нулю, когда регулятор формирует управляющее воздействие. Изобразите на рисунке кривые выходного напряжения П-, И- и Д-регуляторов. Эти три кривые в сумме дают выходное напряжение, генерируемое ПИД-регулятором.  Приложение АСодержание отчета по лабораторной работе
СОДЕРЖАНИЕ 1 Лабораторная работа № Р-1 «Исследование пропорционального (П) регулятора» ….2 Лабораторная работа № Р-2 «Исследование пропорционально – интегрального (ПИ) регулятора» ………………………………………………………………………3 Лабораторная работа № Р-3 «Исследование пропорционально –дифференциального (ПД) регулятора» ………….………………………………… 4 Лабораторная работа № Р-4 «Исследование пропорционально-интегрально-дифференциального (ПИД) регулятора Учебное издание Регуляторы Методические указания по выполнению лабораторных Составители: ст. преп. Слайковская В. А., инж. Тенитилов Е. С. Редактор Технический редактор Корректор Компьютерная верстка Изд. лиц. ЛАР № 021277 от 06.08.98 Подписано в печать Заказ № _______ Тираж 100 экз. Объем ________ п.л. _________________________________________________________________________________________________ Издательство Сибирского государственного университета путей сообщения 630049 Новосибирск, ул. Д. Ковальчук,191 Тел./факс: (383)2280381 Email press@ stu.ru |