
Рабочая программа учебной дисциплины «автоматические системы наземных транспортно-технологических машин» Направление подготовки
| Вид материала | Рабочая программа |
- Аннотация к рабочей программе учебной дисциплины, 22.97kb.
- Аннотация дисциплины «конструкция наземных транспортно-технологических машин (нттм)», 31.95kb.
- К рабочей программе учебной дисциплины «Эксплуатационные материалы», 29.81kb.
- Эксплуатация транспортно технологических машин и комплексов общая характеристика основной, 297.48kb.
- К рабочей программе учебной дисциплины «Методы повышения эффективности использования, 21.55kb.
- Магистерская программа «Автомобильный сервис» Аннотация дисциплины Современные проблемы, 378.73kb.
- Рабочая программа дисциплины «Интегрированные системы проектирования и управления», 208.14kb.
- Рабочая программа дисциплины «Вычислительные машины, системы и сети» Направление подготовки, 231.13kb.
- К рабочей программе учебной дисциплины «Эксплуатационные материалы», 20.69kb.
- К рабочей программе учебной дисциплины «Автомобильные двигатели», 38.58kb.
4.3 Лабораторные работы
| № ЛР | № раздела | Наименование лабораторных работ | Кол-во часов |
| 1 | 12 | Изучение работы систем автоматического управления. | 1 |
| 2 | 12 | Методы линеаризации нелинейных описаний систем. Операторская запись дифференциальных уравнений. | 1 |
| 3 | 12 | Разработка типовых звеньев систем автоматического управления, их передаточные функции. | 1 |
| 4 | 12 | Передаточная функция системы автоматического управления (САУ). Структурные преобразования САУ. | 1 |
| 5 | 12 | Основы моделирования систем управления с помощью MATLAB. | 1 |
| 6 | 12 | Определение характеристик систем управления с помощью MATLAB. Построение корневого годографа с помощью MATLAB. | 1 |
| 7 | 13 | Основы моделирования в программном комплексе MATLAB/Simulink. | 1 |
| 8 | 13 | Решение дифференциального уравнения прямолинейного движения автомобиля в программном комплексе MATLAB/Simulink. | 1 |
| 9 | 13 | Моделирование движения автомобиля в городском цикле с помощью MATLAB/Simulink. | 1 |
| 10 | 13 | Разработка модели криволинейного движения автомобиля в программном комплексе MATLAB/Simulink.. | 2 |
| 11 | 13 | Работа с демонстрационными примерами Simulink. Моделирование торможения автомобиля, оборудованного антиблокировочной системой управления тормозными моментами. Моделирование автоматической трансмиссии автомобиля. | 2 |
| 12 | 13 | Разработка системы управления скоростью движения автомобиля в MATLAB/Simulink. Выбор и оптимизация параметров автоматического регулятора. | 2 |
| 13 | 13 | Разработка системы управления курсовой устойчивостью автомобиля в MATLAB/Simulink. | 2 |
| ИТОГО: | 17 | ||
4.4 Практические занятия
| № занятия | № раздела | Тема | Кол-во часов |
| 1 | 1 | Современное состояние и тенденции развития автомобильных электронных систем. | 1 |
| 2 | 2 | Автоматическое управление энергетической установкой. | 1 |
| 3 | 2 | Автоматические системы управления силовой передачей. | 1 |
| 4 | 2 | Электронные тормозные системы. | 1 |
| 5 | 3 | Электронные системы рулевого управления. | 1 |
| 6 | 4 | Системы поддержания подвижности. | 2 |
| 7 | 5 | Системы управления автомобилем на режиме торможения и разгона. | 2 |
| 8 | 5 | Системы управления динамикой автомобиля. | 2 |
| 9 | 6 | Автоматические системы управления подвеской автомобиля | 1 |
| 10 | 7 | Системы пассивной безопасности. | 1 |
| 11 | 8 | Бортовые информационные системы НТТМ | 2 |
| 12 | 9 | Автоматические системы поддержания профильной и опорной проходимости машины. | 1 |
| 13 | 10 | Беспилотные наземные транспортно-технологические машины. | 2 |
| 14 | 11 | Основные положения синтеза систем управления. | 2 |
| 15 | 12 | Современные положения теории автоматического управления | 3 |
| 16 | 13 | Разработка имитационных моделей, позволяющих проводить поиск алгоритмов работы систем управления, обеспечивающих подвижность НТТМ | 3 |
| 17 | 13 | Разработка моделей автоматических систем НТТМ | 3 |
| 18 | 14 | Модельно-ориентированное проектирование систем управления. | 3 |
| 19 | 15 | Применение технологий искусственного интеллекта при обеспечении подвижности НТТМ | 3 |
| ИТОГО: | 35 | ||
4.5 Курсовая работа
Магистрантам предлагаются следующие темы курсовых работ:
1. «Гидротрансформаторные автоматические трансмиссии».
2. «Автоматизированные коробки передач».
3. «Электрогидравлическая тормозная система».
4. «Электропневматическая тормозная система».
5. «Системы автоматического поддержания дистанции».
6. «Электромеханические усилители руля».
7. «Системы активного рулевого управления».
8. «Система электронного распределения тормозных сил».
9. «Антиблокировочные тормозные системы».
10. «Системы управления силой тяги на ведущих колесах».
11.«Активные дифференциалы».
12. «Система электронного контроля устойчивости».
13. «Системы распределения крутящего момента».
14. «Системы управления кинематикой подвески».
15. «Системы автоматического поддержания проходимости».
16. «Интеллектуальные транспортные системы».
Тема курсовой работы магистранта может быть сопряжена с темой соответствующей магистерской диссертации и проводимого научного исследования, при необходимости тема согласуется с научным руководителем магистранта.
4.6 Самостоятельная работа при изучении разделов дисциплины
| № раздела | Темы, выносимые на самостоятельное изучение | Кол-во часов |
| 1 | 2 | 3 |
| 1 | Технические средства систем управления наземными транспортно-технологическими машинами. | 1 |
| 3 | Электронные системы рулевого управления. | 0.5 |
| 3 | Системы активного рулевого управления. | 0.5 |
| 3 | Электроуправление поворотом колес автомобиля. | 1 |
| 4 | Системы поддержания подвижности. | 1 |
| 5 | Системы управления автомобилем на режиме торможения и разгона. | 1 |
| 5 | Системы управления динамикой автомобиля. | 1 |
| 5 | Системы распределения крутящего момента. | 2 |
| 6 | Активные подвески. | 0.5 |
| 1 | 2 | 3 |
| 6 | Активные стабилизаторы поперечной устойчивости. | 0.5 |
| 6 | Системы управления кинематикой подвески. | 1 |
| 7 | Комплексные системы безопасности. | 1 |
| 7 | Тенденции в совершенствовании средств безопасности. | 1 |
| 8 | Интеллектуальные транспортные системы (ИТС). | 1 |
| 9 | Введение в теорию систем местность-машина. | 0.5 |
| 9 | Автоматические системы поддержания профильной и опорной проходимости машины. | 0.5 |
| 10 | Современное состояние и тенденции развития беспилотных наземных транспортно-технологических машин (БНТТМ). | 0.5 |
| 10 | Общие сведения о планетоходах. | 0.5 |
| 10 | Робототехнические комплексы на базе колесных и гусеничных машин. | 1 |
| ИТОГО: | 16 | |
5 Образовательные технологии
С целью формирования и развития требуемых компетенций магистрантов в рамках изложения данного курса в сочетании с внеаудиторной работой используются активные (учебные дискуссии, просмотр видеороликов, мини лекции) и интерактивные формы проведения занятий.
5.1 Интерактивные образовательные технологии, используемые в аудиторных занятиях
| Семестр | Вид занятия (Л, П3, ЛР) | Используемые интерактивные образовательные технологии | Количество часов |
| 2 | Л | – | – |
| ПЗ | Учебные дискуссии с использованием презентаций мультимедиа проектора, просмотр и обсуждение видеороликов | 10 | |
| ЛР | – | – | |
| 3 | Л | – | – |
| ПЗ | Учебные дискуссии с использованием презентаций мультимедиа проектора, просмотр и обсуждение видеороликов | 8 | |
| ЛР | Обсуждение малыми группами мини-лекций | 2 | |
| ИТОГО: | 20 | ||
6 Оценочные средства для текущего контроля успеваемости и промежуточной аттестации
Текущий контроль осуществляется посредством тестирования после завершения изучения каждого раздела дисциплины, а также путем индивидуальной беседы на лабораторных работах.
Критериями оценки результатов самостоятельной работы студента являются:
– уровень освоения студентом учебного материала;
– обоснованность и чёткость изложения ответа;
– умения студента использовать приобретённые теоретические знания при выполнении лабораторных работ.
Итоговый контроль осуществляется путем проведения зачета.
Образец оценочных средств для текущего контроля в виде тестовых заданий по разделу № 13 «Разработка моделей движения наземных транспортно-технологических машин и моделей систем управления их подвижностью»:
1) На рисунке представлен вариант решения дифференциального уравнения прямолинейного движения автомобиля методом визуально-ориентированного блочного имитационного моделирования (ПК MATLAB/Simulink).
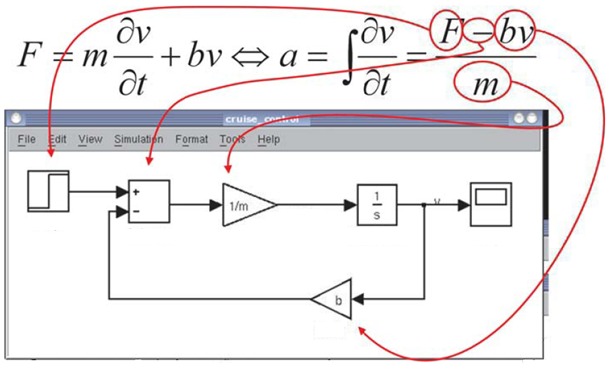
Укажите название блока, на выходе которого формируется значение скорости.
а) Integrator
б) Gain
в) Step
Укажите название блоков, с помощью которых производится учет параметров m и b.
а) Gain
б) Step
в) Scope
С помощью какого блока задается тяговая сила F?
а) Step
б) Signal Builder
в) Look-Up Table.
Укажите название блока, с помощью которого осуществляется просмотр и оценка результатов моделирования
а) Scope
б) Gain
в) Step
2) На рисунке представлен пример моделирования движения автомобиля в городском цикле средствами программного комплекса MATLAB/Simulink.
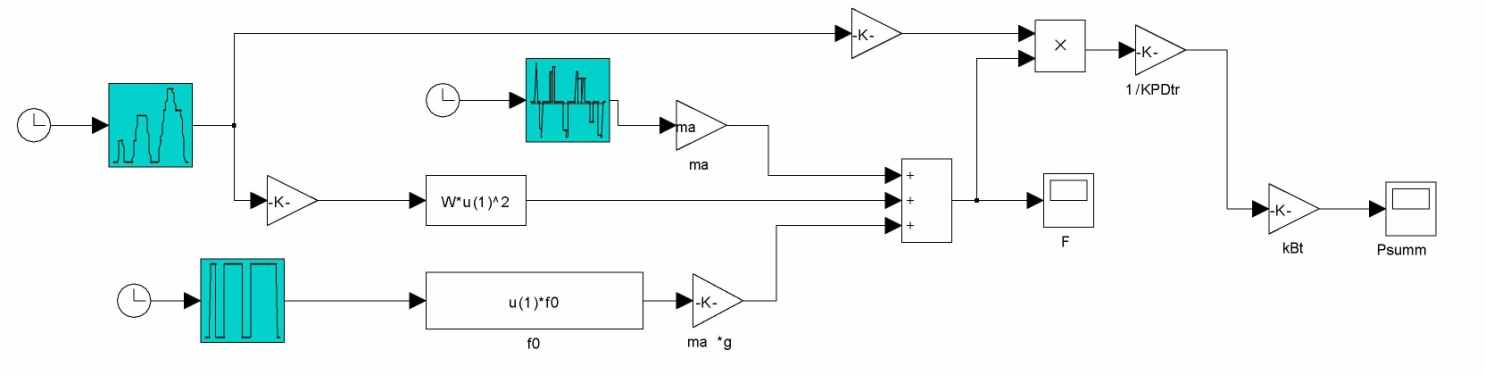
Какой блок в данной модели используется для представления данных о требуемой скорости движения автомобиля как функции времени в табличной форме?
а) Блок Look-Up Table
б) Блок Transport Delay
в) MATLAB Fcn.
3) На рисунке представлен пример моделирования движения полноприводного автомобиля.
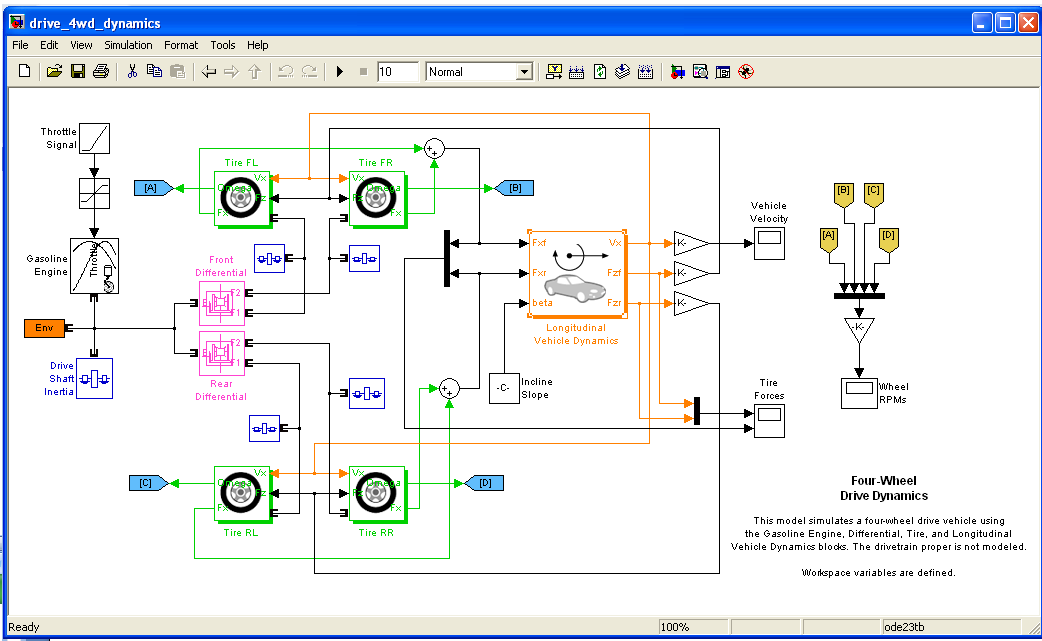
Средствами какого пакета расширения MATLAB/Simulink реализована данная модель?
а) SimDriveline
б) SimMechanics Blockset
в) Virtual Reality Toolbox
Образец оценочных средств для текущего контроля в виде перечня вопросов, задаваемы после проведения лабораторной работы № 2 «Методы линеаризации нелинейных описаний систем. Операторская запись дифференциальных уравнений»:
1. Что Вы понимаете под уравнением движения?
2. С какой целью проводится линеаризация дифференциальных уравнений?
3. Какая характеристика называется статической характеристикой?
4. Какие динамические характеристики Вам известны? Дайте их определение.
6. Что представляет собой преобразование Лапласа от некоторой функции?
7. Для каких функций существует преобразование Лапласа?
Перечень вопросов, выносимых на зачет (2 семестр):
1. Автоматическое управление. Системы автоматического управления. Иерархия задач управления НТТМ.
2. Классификация транспортно-технологических систем. Классификация систем управления НТТМ.
3. Структурная схема НТТМ. Структурно-функциональная схема НТТМ. Критерии принятия решений при управлении.
4. Разделение систем управления по антропологическому признаку. Схема уровней систем управления.
5. Технические средства систем управления наземными транспортно-технологическими машинами.
6. Современное состояние и тенденции развития автомобильных электронных систем.
7. Автоматическое управление энергетической установкой. Системы впрыска бензина. Система питания Common Rail. Системы изменения фаз газораспределения.
8. Электронные системы управления силовой передачей. Принцип действия автоматической коробки перемены передач.
9. Гидротрансформаторные автоматические трансмиссии.
10. Механические коробки передач с электронным управлением (автоматизированные коробки передач).
11. Автоматические коробки передач с двойным сцеплением.
12. Коробки передач с вариаторами.
13. Электронные тормозные системы. Электрогидравлическая тормозная система. Электропневматическая тормозная система.
14. Автоматические системы поддержания скорости и дистанции в транспортном потоке. Адаптивный круиз-контроль. Система поддержания скорости с передачей информации от лидирующего транспортного средства.
15. Электронные системы рулевого управления. Гидроусилители руля с электронной регулировкой работы распределителя. Электромеханические усилители руля.
16. Системы активного рулевого управления. Электроуправление поворотом колес автомобиля.
17. Глобальная проблема управления НТТМ – подержание устойчивого и безопасного движения. Понятие подвижности НТТМ.
18. Локальные задачи подвижности: жизнестойкость и мобильность. Управление мобильностью НТТМ. Поддержание жизнеспособности НТТМ. Системы дублирования и восстановления.
19. Принцип действия антиблокировочной системы (АБС). Компоненты антиблокировочной системы (АБС). Варианты регулирования АБС.
20. Антиблокировочные тормозные системы (АБС) грузовых автомобилей.
21. Электронное распределение тормозных сил. Система аварийного торможения.
22. Системы управления силой тяги на ведущих колесах. Противобуксовочные системы (ПБС).
23. Система электронного контроля устойчивости (ЭКУ). ЭКУ и активная безопасность автомобиля. Теоретические основы управления курсовой устойчивостью автомобиля. Действие системы ЭКУ.
24. Структурная схема системы ЭКУ. Функциональная схема системы ЭКУ. Конструктивные особенности элементов системы ЭКУ. Эффективность работы системы ЭКУ. Системы электронного контроля устойчивости для большегрузных автомобилей. 25. Системы распределения крутящего момента. Система полного привода xDrive. Активные дифференциалы. Структурная схема и принцип действия трансмиссии SH-AWD.
26. Характеристика систем управления жесткостью и демпфированием подвески. Система регулирования жесткости подвески с пневматическим упругим элементом. Система регулирования жесткости подвески с гидропневматическим упругим элементом.
27. Активные подвески. Гидропневматическая подвеска. Подвеска с пневмоэлементами. Амортизатор с управляемым перепускным клапаном. Активные стабилизаторы поперечной устойчивости. Системы управления кинематикой подвески.
28. Система подушек безопасности. Система защиты от бокового удара. Активные подголовники. Система натяжения ремней безопасности.
29. Комплексные системы безопасности. Тенденции в совершенствовании средств безопасности.
30. Система «водитель – автомобиль – дорога – среда». Интеллектуальные транспортные системы (ИТС). ИТС в обеспечении безопасности. ИТС в организации дорожного движения. Системы мониторинга и контроля в ИТС.
31. Подсистемы ИТС в транспортных средствах. Подсистемы ИТС, интегрирующие функции инфраструктуры и транспортных средств. Подсистемы ИТС в дорожной инфраструктуре.
32. Средства отображения информации на автомобилях. Бортовая система контроля. Навигационные системы автомобилей. Вспомогательные информационные системы.
33. Проходимость как эксплуатационное свойство и критическая характеристика конструкции машины. Передвижение НТТМ вне дорог.
34. Классификация эксплуатационных условий функционирования машин. Функциональное назначение машин. Пространственные и временные характеристики оперативной концепции машины. Оперативные ограничительные факторы функционального назначения машины.
35.Классификация машин по типу движителя. Введение в теорию систем местность-машина. Основные модели взаимодействия движителя машины с полотном пути.
36. Автоматические системы поддержания профильной и опорной проходимости машины.
37. Современное состояние и тенденции развития беспилотных НТТМ. Общие сведения о планетоходах. Мобильные роботы. Робототехнические комплексы на базе колесных и гусеничных машин.
38. Задачи управления движением беспилотными НТТМ.
39. Мониторинг окружающей среды. Классификация сенсорных систем. Сенсорные системы БНТТМ. Вычислительные аппаратные средства БНТТМ.
40. Функционально-структурная схема общей системы управления БНТТМ.
Перечень вопросов, выносимых на зачет (3 семестр):
1. Основные положения синтеза систем управления. Процесс синтеза системы управления. Определение целей управления. Выбор переменных подлежащих управлению. Выбор конфигурации системы управления: алгоритмическая и функциональная структура СУ.
2. Модели объектов управления: линеаризованная модель, нелинейная модель, нейросетевая модель. Построение (определение) закона управления. Выбор регулятора (СУ) и определение ключевых параметров, подлежащих настройке.
3. Моделирование регулятора: ПИД – регуляторы, нечеткие регуляторы, нейросетевые регуляторы, гибридные СУ, конечные автоматы. Пересчет системы управления к цифровому аналогу.
4. Введение в системы автоматического управления. Математические модели систем. Линеаризация нелинейных моделей объектов. Преобразование Лапласа. Передаточная функция. Типовые динамические звенья.
5. Структурные схемы. Модели в переменных состояния.
6. Анализ систем управления. Требования к управлению. Точность. Устойчивость линейных систем. Качество процессов управления и методы его оценки. Робастность.
7. Синтез систем управления с обратной связью. Классическая схема. Трехканальные (П, ПИ, ПИД) регуляторы. Метод корневого годографа.
8. Дискретные системы автоматического регулирования и управления. Цифровые системы управления. Нелинейные системы автоматического регулирования и управления.
9. Математическое моделирование. Имитационное моделирование. Обзор программных средств разработки имитационных моделей движения НТТМ.
10. Принципы реализации математических моделей движения НТТМ средствами программного обеспечения. Основы моделирования движения НТТМ в программном комплексе MATLAB/Simulink.
11. Модельно-ориентированное проектирование систем управления. Функционал для разработки прототипов систем управления и их тестирования в связке модель-устройство.
12. Аппаратно-программное тестирование. Программное тестирование. Процессорно-программное тестирование.
13. Создание экспериментальных образцов систем управления, обеспечивающих подвижность НТТМ.
14. Искусственный Интеллект (ИИ). Теоретические основы создания систем ИИ. 15. Подходы к созданию систем ИИ. Экспертные системы. Когнитивные системы. Искусственные нейронные сети.
15. Модель Биологического Нейрона. Обучение многослойных сетей методом обратного распространения ошибки.
16. Нейросетевая технология и синтез систем управления, обеспечивающих подвижность НТТМ.
17. Аппарат нечеткой логики. Роль аппарата нечеткой логики при решении задач поддержания подвижности НТТМ.
18. Гибридные интеллектуальные системы.
19. Введение в теорию конечных автоматов. Использование теории конечных автоматов при синтезе систем управления, обеспечивающих подвижность НТТМ.
7 Учебно-методическое обеспечение дисциплины
7.1 Основная литература
| № п/п | Автор(ы) | Заглавие | Издательство, год издания | Назначение, вид издания, гриф | Кол-во экз. в библиотеке |
| 1. | Беляков В.В., Гончаров К.О., Макаров В.С. | Теория автома-тических систем автомобилей. | Н.Новгород, НГТУ, 2008 | Учебное пособие в 2-х частях. Часть 1, УС | 128 |
| 2. | Беляков В.В., Гончаров К.О., Макаров В.С. | Теория автомати-ческих систем автомобилей. | Н.Новгород, НГТУ, 2009 | Учебное пособие в 2-х частях. Часть 2, УС | 98 |
| 3. | Огороднов С.М. | Автоматические системы транспортных машин. Основы теории и конструкции. | Н.Новгород, НГТУ, 2008 | Учебное пособие | 78 |
7.2 Дополнительная литература
| № п/п | Автор(ы) | Заглавие | Издательство, год издания | Назначение, вид издания, гриф | Кол-во экз. в библиотеке |
| 1. | Соснин Д.А., Яковлев В.Ф. | Новейшие автомобильные электронные системы. | М.: СОЛОН-Пресс, 2005 | Учебник | 10 |
| 2. | Мельников А.А. | Теория автоматического управления техническими объектами автомобилей и тракторов. | М.: Академия, 2003 | Учебное пособие. | 40 |
| 3. | Мельников А.А. | Управление техническими объектами автомобилей и тракторов. Системы электроники и автоматики | М.: Академия, 2003 | Учебное пособие. | 40 |
| 4 | Тарасик В.П., Рынкевич С.А. | Интеллектуальные системы управления транспортными средствами. | Мн.: УП «Технопринт», 2004 | Монография. | 6 |
| 5 | Тарасик В.П. | Теория движения автомобиля. | Спб.:БХВ — Петербург, 2006 | Учебник для ВУЗов. | 25 |
| 6 | Кузнецов Е.С. | Управление техническими системами. | М. :МАДИ, 2003 | Учебное пособие. | 10 |
| 7 | Гудвин Г.К. | Проектирование систем управления. | М. : БИНОМ. Лаб.знаний, 2004 | Учебное пособие. | 15 |
7.3 Периодические издания
Журнал «Автомобильная промышленность»
Научно-технический журнал «Электроника и электрооборудование транспорта»
Журнал «Мир транспорта»
Журнал «Автотранспортное предприятие»
Журнал «Датчики и системы»
7.4 Интернет-ресурсы
Реферативный журнал ВИНИТИ (база данных: «Транспорт»)
7.5 Методические указания к лабораторным занятиям
1. Методические указания к проведению практических занятий по теме «Задачи управления наземными транспортно-технологическими машинами», Н.Новгород, 2010 г. (Доступны в электронном виде на кафедре «Автомобили и тракторы»).
2. Методические указания к проведению практических занятий по теме «Электронные системы управления автомобилем», Н.Новгород, 2011 г. (Доступны в электронном виде на кафедре «Автомобили и тракторы»).
7.6 Методические указания к практическим занятиям
1. Методические указания к лабораторным работам по теме «Автоматическое управление сложными динамическими объектами», Н.Новгород, 2010 г. (Доступны в электронном виде на кафедре «Автомобили и тракторы»).
2. Методические указания к лабораторным работам по теме «Модели движения и управления транспортно-технологическими системами», Н.Новгород, 2011 г. (Доступны в электронном виде на кафедре «Автомобили и тракторы»).
7.7 Методические указания к курсовому проектированию и др. видам
самостоятельной работы
Не предусмотрены
7.8 Программное обеспечение современных информационно-коммуникационных технологий
Академическая лицензия MathWorks MATLAB.
Назначение программного обеспечения: интерактивная среда технических расчетов, разработки алгоритмов и современный инструмент анализа данных.
Академическая лицензия MathWorks Simulink.
Назначение программного обеспечения - графическая среда имитационного моделирования, позволяющая при помощи блок-диаграмм в виде направленных графов, строить динамические модели объектов и моделировать работу систем управления.
8 Материально-техническое обеспечение дисциплины
Специализированная аудитория магистрантов и аспирантов кафедры «Автомобили и тракторы» НГТУ (ауд. 1120) с техническим оснащением.
Компьютерный класс кафедры «Автомобили и тракторы» НГТУ (ауд. 1128) с компьютерной техникой и мультимедиа-проектором.
Технические средства обеспечения:
- Компьютерная техника кафедры «Автомобили и тракторы»:
- процессор Pentium III;
- 256 Мбайт оперативной памяти;
- 30 ГБ дискового пространства;
- операционная система WINDOWS XP (sp3).
- Мультимедиа-проектор
ЛИСТ
согласования рабочей программы
Направление подготовки: 190100.68 Наземные транспортно-технологические ком-
код и наименование
плексы
Наименование магистерской программы: Автомобили_
Дисциплина: Автоматические системы наземных транспортно-технологических маши
Форма обучения: очная______
(очная, очно-заочная, заочная)
Учебный год 2011/2012
РЕКОМЕНДОВАНА заседанием кафедры «Автомобили и тракторы»____________
наименование кафедры
протокол N 5 от "20" октября 2011 г.
Ответственный исполнитель, заведующий кафедрой
« Автомобили и тракторы»________________________Орлов Л.Н._______________
наименование кафедры подпись расшифровка подписи дата
Исполнители:
______________________________________________ Беляков В.В._______________
должность подпись расшифровка подписи дата
_______________________________________________Макаров В.С_____________
должность подпись расшифровка подписи дата
_______________________________________________ Зезюлин Д.В._____________
должность подпись расшифровка подписи дата
| СОГЛАСОВАНО: Заведующий выпускающей кафедрой « Автомобили и тракторы» наименование кафедры Орлов Л.Н. . личная подпись расшифровка подписи дата Председатель координационного совета по направлению подготовки Орлов Л.Н. . личная подпись расшифровка подписи дата Научный руководитель магистерской программы Орлов Л.Н. . личная подпись расшифровка подписи дата Заведующий отделом комплектования научной библиотеки _____________________________________________ Коптелова Т.А._____________ личная подпись расшифровка подписи дата |
Рабочая программа зарегистрирована в УМУ под учетным номером __________ на правах учебно-методического электронного издания.
Начальник ОСПМ УМУ_____________________Володина Е.В.________________
личная подпись расшифровка подписи дата
Дополнения и изменения в рабочей программе
дисциплины на 20__/20__ уч.г.
| | Внесенные изменения на 20__/20__ учебный год Утверждаю Проректор по учебной работе(подпись, расшифровка подписи) “____”______________20… г |
В рабочую программу вносятся следующие изменения:
- …………………………………..;
- …………………………………...
или делается отметка о нецелесообразности внесения каких-либо изменений на данный учебный год
Рабочая программа пересмотрена на заседании кафедры ______________________________________________________________________
(дата, номер протокола заседания кафедры, подпись зав. кафедрой).
ОДОБРЕНА на заседании координационного совета, протокол № ___ от "___" ________ 20__ г."
Председатель координационного совета по направлению подготовки
______________________________________________________________________
шифр наименование личная подпись расшифровка подписи дата
СОГЛАСОВАНО:
Заведующий выпускающей кафедрой_________________________________________
наименование кафедры личная подпись расшифровка подписи дата
Заведующий отделом комплектования научной библиотеки
______________________________________________________________________
личная подпись расшифровка подписи дата
Декан (Директор) ________________________________________________________________________
наименование факультета (института, где реализуется данное направление) личная подпись расшифровка подписи дата
Дополнения и изменения внесены в базу данных рабочих программ дисциплин
Начальник ОСПМ УМУ ___________________________________________________
личная подпись расшифровка подписи дата
| Версия: 1.0 | Без подписи документ действителен 3 суток после распечатки. Дата и время распечатки: 12.11.2011 11:10 | КЭ:________ | УЭ №_______ | Стр. из |