
Рассматривается оптимизация эксплуатационных режимов судовых электроэнергетических установок и её реализация на основе применения микропроцессорной техники
| Вид материала | Документы |
- Философия микропроцессорной техники, 3706.56kb.
- Методика исчисления и уплаты налога на прибыль 7 Изменения по вопросам исчисления, 463.71kb.
- Вопросы для подготовки к экзамену по предмету, 65.62kb.
- Темы рефератов История развития интегральных микросхем. Факторы прогресса технологии, 23.95kb.
- Содержание: 3 Аннотация, 163.94kb.
- Схема разделения секрета на основе специальных метрических характеристик объектов, 29.8kb.
- 1. Список специализаций специальности «Эксплуатация судовых энергетических установок», 2317.89kb.
- Разработка микропроцессорной системы для управления шнековым дозатором, 23.28kb.
- Исследование характера и диапазона изменения, 239.29kb.
- Цифровые тензометрические весы, 40.52kb.
УДК 639.2.06
ОПТИМИЗАЦИЯ И КОМПЬЮТЕРИЗАЦИЯ РЕЖИМОВ РАБОТЫ ЭЛЕКТРОЭНЕРГЕТИЧЕСКИХ УСТАНОВОК КОРАБЛЕЙ И СУДОВ
В.С. Богомолов, Е.В. Афанасьева
Рассматривается оптимизация эксплуатационных режимов судовых электроэнергетических установок и её реализация на основе применения микропроцессорной техники.
Оптимизация, компьютеризация, режимы, электроэнергетические установки, валогенераторы, параллельная работа, расход топлива.
В электроэнергетических установках и системах приводов судов, например, в валогенераторных установках (ВГУ) и в гребных электрических установках (ГЭУ) в связи с нестабильностью скорости вращения гребного вала происходят отклонения напряжения и тока в переходных процессах, выходящие за пределы, регламентируемые Морским регистром судоходства РФ. В частности глубокие провалы напряжения при наборе нагрузки в ВГУ, резкие броски тока большой амплитуды при пуске и реверсе гребных электродвигателей в ГЭУ [1]. В установившихся режимах часто возникают автоколебания токов и напряжений, амплитуда которых значительно превышает границы статической точности регулирования. Это наблюдается на промысловых судах РТМ-С (рыболовный траулер морозильный супер), СТМ (средний траулер морозильный), РТМК-С (рыболовный траулер морозильный консервный супер), на паромах серии «А. Коробицын», на аварийно-спасательных судах Балтийского флота СС-921, на пограничных кораблях «Гриф-М» и др.
Аналогичные недостатки имеют место и на береговых автономных электростанциях, в которых мощность источников электроэнергии соизмерима с мощностью потребителей, например в автомобильных дизельных, контрольных пограничных комплексах и др.
Причинной указанных явлений является то обстоятельство, что в качестве систем автоматического регулирования (САР) напряжения и тока используются регуляторы, действующие по принципу отклонения регулируемой величины, которые не учитывают все факторы, влияющие на переходные процессы напряжения и тока.
Такие регуляторы являются пропорциональными (П-регуляторы) и действуют только вдоль вертикальной оси (напряжение, ток). В ходе регулирования имеют место переходные процессы, однако они не контролируются и не регулируются (горизонтальная ось времени).
Для устранения указанных недостатков, которые имеют универсальный характер и характерны для нескольких классов электроэнергетических установок и
систем электропривода, целесообразно применение регуляторов построенных по принципу подчиненного регулирования параметров [1,2].
В этих регуляторах внутренний регулятор (для указанных объектов - регулятор напряжения или тока) является подчиненным внешнему регулятору). Подчинение осуществляется через внутренние обратные связи объекта регулирования в переходном процессе регулируемой величины. Для ВГУ и ГЭУ внутренняя обратная связь происходит по изменению скорости гребного вала и гребного электродвигателя (ГЭД).
Характерной особенностью перечисленных систем автоматического регулирования для указанных установок является то, что подчинение осуществляется через объект регулирования, то есть не по управлению (с выхода предыдущего регулятора на вход последующего), а по нагрузке (через объект управления) [1].
В ходе синтеза оптимального регулятора напряжения валогенератора (ВГ) производится компенсация динамических звеньев объекта регулирования. При этом идеальная компенсация нецелесообразна, поскольку САР оказалась бы неработоспособной вследствие наличия высокочастотных возмущений, которые не отфильтровываются инерционностью элементов системы. Компенсация звеньев регулятора напряжения с малой постоянной времени приводит к неоправданному усложнению системы подчиненного регулирования (СПР), так как влияние этих постоянных времени на переходный процесс незначительно. Поэтому при последовательной коррекции производится компенсация средних и больших постоянных времени регулятора напряжения ВГ и включение в разомкнутую цепь регулятора интегрирующего динамического звена. Введение интегрирующего звена делает регулятор астатическим, что позволяет регулировать параметр времени (по горизонтальной оси переходного процесса).
Для электроэнергетических установок синтезирован астатический пропорционально-интегральный (ПИ) регулятор напряжения. Постоянная интегрирования регулятора выбирается из условия обеспечения оптимального быстродействия СПР при нулевой статической ошибке, то есть в качестве критерия оптимальности переходного процесс напряжения принимается «технический» оптимум – оптимальное соотношение напряжения и времени в переходном процессе при нулевом статизме СПР.
Введение астатического регулятора позволяет сохранить высокую точность стабилизации напряжения ВГ при снижении коэффициента усиления регулятора. Снижение коэффициента усиления в ПИ-регуляторе отражается лишь на быстродействии системы, которое находится в пределах, удовлетворяющих требования по качеству регулирования. В качестве критерия оптимальности переходных процессов используется технический оптимум, устанавливающий компромиссное соотношение между величиной перерегулирования и временем переходного процесса [2].
Передаточная функция ПИ-регулятора напряжения имеет вид
R1 R1 ТГ
Wрн(р) =___________ + _____________ ,
КОН КУ КГТP КОН КУ КГТ
где R1 – сопротивление цепей регулятора напряжения;
КОН, КУ, КГ – коэффициент обратной связи по напряжению ВГ, электронного
усилителя и генератора соответственно;
ТГ – постоянная электромагнитная времени ВГ;
Т – постоянная интегрирования, выбирается из условия технического оптимума;
р – символ интегрирования.
Для систем электропривода, в частности для ГЭУ, синтезирован пропорционально-интегрально-дифференциальный регулятор тока (ПИД).
Передаточная функция ПИД-регулятора тока включает дополнительно третье слагаемое, учитывающие влияние ГЭД на переходной процесс тока, и имеет вид:
R2 R2 (ТГ +ТД) R2ТГТД
WPТ(p) =___________ + _____________ + _____________ p ,
КОТ КУ КГТP КОТ КУ КГТ КОТ КУ КГТ
где R2 – сопротивление цепей регулятора тока;
КОТ – коэффициент обратной связи по току главной цепи
ТД – электромеханическая постоянная времени ГЭД;
Р – символ дифференцирования (в числителе).
Принципиальная электрическая схема ПИ-регулятора напряжения представлена на рис. 1. В электрической схеме ПИД-регулятора тока дополнительно включается емкость на входе регулятора и датчик тока. Разработан универсальный астатический регулятор напряжения и тока для электроэнергетических установок и систем электропривода судов, предусматривающий включение на входе электронного компаратора электрических параметров [1].
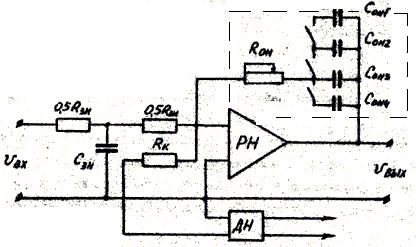
Рис.1 Принципиальная электрическая схема ПИ-регулятора напряжения ВГ (ДН – датчик напряжения, РН – регулятор напряжения)
Применение астатических регуляторов напряжения позволило осуществить длительную и устойчивую работу валогенераторов между собой, а также ВГ с другими генераторными агрегатами в частности с дизель генераторами.
Параллельная работа ВГ обеспечивается путем одновременной обработки сигнала изменения напряжения астатическими ПИ-регуляторами напряжения РН1 и РН2 обоих валогенераторов с корректирующими звеньями КЗ1 и КЗ2, обеспечивающими одновременное завершение переходного процесса напряжения в результате настройки в соответствии с условиями технического оптимума. Для синхронизации частоты обоих генераторных агрегатов введены датчики их скорости вращения, а сигнал рассогласования поступает на серводвигатель, перемещающий рейку топливного насоса приводного двигателя.
Целесообразная реализация ПИ-регуляторов напряжения на основе микропроцессорных средств (МПС). Такое решение позволяет одновременно осуществлять оптимизацию нескольких оптимальных процессов, таких как оптимальный режим по расходу топлива (при снижении скорости вращения главных двигателей) ВГУ, корректировка параметров переходного процесса напряжения ВГ, тока ГЭД и др.
Гибкость в программном обеспечении и компактность микропроцессора позволяет создать адаптивную систему автоматического регулирования автономно и параллельно работающих генераторов и скорости вращения дизель-генераторов.
На кораблях возможно применение безвахтенного обслуживания на основе
использования микропроцессоров. С их помощью можно реализовать оптимальные режимы функционирования вало- и дизель- генераторов (ВГ, ДГ) как при автономной, так и при параллельной работе [2].
Внедрение микропроцессорного оптимального управления приводит к безвахтенному обслуживанию по классу автоматизации А1, к совмещению должностей (механик- электромеханик- оператор ЭВМ), к сокращению экипажей, к сервисному обслуживанию промысловых судов, к повышению надёжности их функционирования, а также сокращению эксплуатационных расходов на судах промыслового и морского флота страны.
Литература:
- Богомолов В.С. Устройство параллельной работы валогенераторов подчиненного управления. А.С. 1657451 (СССР, Заявл. 07.03.89. № 4659209/27-11/034077/. Опубл. В Б.И. 1991. №23. В 63 Н 23/06.
- Богомолов В.С., Афанасьева Е.В. Результаты испытаний оптимального по расходу топлива режима валогенераторной установки с компьютерным управлением// Мат-лы 18 межвузов. науч.- практ. конференции «Проблемы и перспективы разработки, совершенствования и применения образцов вооружения и техники», Калининград, КПИ РФ, 2005. С. 116-118.
OPTIMIZATION AND COMPUTARIZATION OF REGIMES OF ELECTROTECNICAL PLANTS ON THE SHIPS
V.S. Bogomolov, E.V. Afanasieva
Given work is dedicated to development of the program for calculation of the mode to ship power station, as well as is proved broad possibilities of the reproduction different situation operating the ship electro energy installation