
Синтез алгоритмов управления многодвигательным электроприводом конвейерного транспорта с использованием полупроводниковых преобразователей
| Вид материала | Автореферат диссертации |
- Моделирование автоматизированной системы контроля и управления технологическими объектами, 35.31kb.
- Д. С. Осипенко Понятие алгоритма. Примеры алгоритмов. Свойства алгоритмов. Способы, 96.46kb.
- Оптимизация микропроцессорных векторных преобразователей на базе контроллеров analog, 31.09kb.
- Прямое преобразование солнечной энергии в электрическую, 55.07kb.
- «Понятие об алгоритме. Примеры алгоритмов. Свойства алгоритмов. Типы алгоритмов, построение, 84.9kb.
- Математическая модель тиристорного асинхронного электропривода в среде matlab, 183.43kb.
- Министерство образования и науки РФ московский энергетический институт (технический, 83.36kb.
- Centrum motors karaganda, 68.62kb.
- Учебная программа «современные средства механизации и оборудование конвейерного транспорта, 88.52kb.
- Министерство транспорта российской федерации федеральное агентство железнодорожного, 557.64kb.
На правах рукописи
ЧЕРЕМУШКИНА Маргарита Сергеевна
СИНТЕЗ АЛГОРИТМОВ УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ЭЛЕКТРОПРИВОДОМ КОНВЕЙЕРНОГО ТРАНСПОРТА С ИСПОЛЬЗОВАНИЕМ ПОЛУПРОВОДНИКОВЫХ ПРЕОБРАЗОВАТЕЛЕЙ
Специальность 05.09.03 – Электротехнические комплексы и системы
Автореферат
диссертации на соискание ученой степени
кандидата технических наук
Санкт-Петербург
2009
Работа выполнена в Санкт-Петербургском государственном горном институте имени Г.В. Плеханова (техническом университете).
Научный руководитель
доктор технических наук, профессор
Козярук Анатолий Евтихиевич
Официальные оппоненты:
доктор технических наук, профессор
Ефимов Игорь Григорьевич
кандидат технических наук
Томасов Валентин Сергеевич
Ведущее предприятие – ООО «СПб-Гипрошахт», г.Санкт-Петербург.
Защита диссертации состоится «30» сентября 2009 г. в 14ч. 30 мин. на заседании диссертационного совета Д212.224.07. в Санкт-Петербургском государственном горном институте имени Г.В. Плеханова (техническом университете) по адресу: 199106 Санкт-Петербург, 21-я линия, дом 2, ауд. №7212.
С диссертацией можно ознакомиться в библиотеке Санкт-Петербургского государственного горного института имени Г.В. Плеханова (технического университета).
Автореферат разослан «28» августа 2009 г.
Ученый секретарь
диссертационного совета
профессор, д.т.н. В.В. Габов
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность темы: Одним из наиболее производительных типов машин непрерывного транспорта являются ленточные конвейеры, поскольку они способны перемещать полезное ископаемое на значительные расстояния с минимальными эксплуатационными и энергетическими затратами, могут быть объединены в конвейерные линии большой протяженности и производительности, а также использоваться в комплексах циклично-поточной технологии.
Совершенствованию конвейерных электроприводов уделяли в разные годы большое внимание такие известные отечественные ученые как: Тарасов Ю.Д., Дмитриев В.Г., Запенин И.В., Шахмейстер Л.Т., Дьячков В.К., Соловьев А.С. и т.д. Интерес к электроприводу механизмов непрерывной транспортировки проявляют различные технические предприятия мира: Siemens (Германия), Schneider Electric (Франция), Metso Minerals (Англия), ОАО «Александровский машиностроительный завод» (Россия), Pioma (Польша), ABB (Германия) и др.
Однако к настоящему времени не решен ряд вопросов, связанных с выравниванием нагрузки в многодвигательном электроприводе и реализацией системы управления многодвигательным асинхронным частотно-регулируемым конвейерным электроприводом. Существующие системы управления электроприводом конвейерного транспорта не позволяют обеспечить требования по рациональному энерго- и ресурсосбережению. Например, существующая система магистрального конвейерного транспорта шахт ОАО «Воркутауголь» построена 30-40 лет назад и в настоящее время работает на предельных режимах, что становится сдерживающим фактором в работе угольного предприятия.
Сказанное подчеркивает актуальность и необходимость проведения исследований по синтезу алгоритмов и системы управления электроприводом конвейерного транспорта с выбором соответствующих технических средств.
Данная работа посвящена разработке алгоритма управления, удовлетворяющего техническим требованиям, предъявляемым к шахтным ленточным конвейерам, и позволяющего осуществлять энерго- и ресурсосбережение с учетом случайного характера грузопотока. Наиболее эффективным методом решения поставленных задач является построение систем управления с применением частотно-регулируемых асинхронных двигателей.
Цель работы: повышение энерго- и ресурсосбережения конвейерного транспорта путем реализации разработанных алгоритмов управления частотно-регулируемым многодвигательным асинхронным электроприводом конвейера.
Задачи исследования:
1. Разработка математической модели системы электропривод – конвейер и поточно-транспортной системы, состоящей из нескольких последовательно и параллельно включенных конвейеров.
2. Разработка алгоритмов управления частотно-регулируемыми многодвигательными электроприводами конвейерного транспорта, позволяющих обеспечить равномерность натяжения ленты по ее длине и автоматическое регулирование отдельных двигателей с целью перераспределения нагрузки между ними.
3. Создание экспериментального стенда с применением частотно-регулируемого электропривода и реализацией синтезированных алгоритмов системы автоматического управления (САУ).
4. Определение эффективности применения разработанных алгоритмов управления.
5. Разработка структуры системы контроля и диагностики комплекса многоконвейерных технологических линий с целью повышения эксплуатационных характеристик электроприводов конвейерного транспорта.
Идея работы: Для обеспечения энерго- и ресурсосбережения за счет снижения нагрузок на ленту в динамических режимах и регулирования производительности поточных конвейерных линий следует управлять электроприводами конвейерного транспорта путем регулирования частоты вращения асинхронных двигателей посредством полупроводниковых статических преобразователей
Научная новизна:
1. Создан алгоритм управления с корректировкой сигналов задания в системе управления многодвигательным частотно-регулируемым электроприводом конвейера, учитывающий случайный характер грузопотока, что обеспечивает ресурсосбережение конвейерной установки за счет перераспределения и выравнивания нагрузки двигателей конвейера.
2. Установлены зависимости изменения электромагнитного момента электродвигателя от динамических нагрузок на валу электропривода конвейера в режиме пуска и в рабочих режимах при различных алгоритмах управления многодвигательным электроприводом, позволяющие обосновать необходимый алгоритм системы управления многодвигательным электроприводом конвейера, что обеспечивает энергетически эффективный режим работы транспортной установки.
Защищаемые положения:
1. Разработанная математическая модель системы «частотно-регулируемый многодвигательный электропривод – конвейер – система управления конвейерами», учитывающая динамические процессы, происходящие в элементах транспортной системы, обеспечивает оценку энергетической эффективности применения разработанных алгоритмов, что позволяет снизить динамические перегрузки в ленте на (15-20)%.
2. Алгоритм формирования сигналов задания в системе управления многодвигательным асинхронным электроприводом, позволяющий учитывать случайный характер грузопотока, повышает равномерность перераспределения нагрузки между приводными двигателями до 80% и исключает проскальзывание ленты при изменении условий работы конвейера.
Методы исследований: При проведении теоретических исследований использовались методы теории автоматического управления сложной электромеханической системой, методы теории электропривода и математического моделирования с использованием программы Matlab. Экспериментальные исследования проводились на лабораторном макете многодвигательного асинхронного частотно-регулируемого электропривода кафедры Э и ЭМ СПГГИ (ТУ).
Обоснованность и достоверность научных положений, выводов и результатов подтверждается достаточным объемом и близкой сходимостью результатов теоретических и экспериментальных исследований.
Практическая ценность работы:
Создана математическая модель многодвигательного частотно-регулируемого электропривода, построенная с введением системы формирования корректирующих сигналов задания при случайном характере нагрузки. Проведено апробирование алгоритмов управления многодвигательным электроприводом на микропроцессорных средствах, для чего создано программное обеспечение для программируемого контроллера.
Внедрение разработанных алгоритмов и системы управления шахтным конвейерным транспортом осуществлено в ОАО «Гипрошахт» и ОАО «Воркутауголь».
Апробация работы:
Основные положения и результаты диссертационной работы докладывались на: IX Международной выставке молодежных научно-технических проектов ЭКСПО-Наука 2003, проводившейся под эгидой ЮНЕСКО; Всероссийской межвузовской научно-технической конференции студентов и аспирантов «Неделя науки» СПбГПУ 2004-2006, 2008г; международной конференции молодых ученых «Проблемы освоения полезных ископаемых» 2005г; конференции молодых ученых «Полезные ископаемые России и их освоение» 2005г; научных конференциях в Краковской Горно-металлургической академии 2005-2007г; международном форуме молодых ученых «Проблемы рационального природопользования» 2006г; международной конференции в Фрайберге 2008г.
Личный вклад автора:
Разработана математическая модель системы электропривод – конвейер и модель управления поточно-транспортной системой, состоящей из нескольких последовательно и параллельно включенных конвейеров.
Разработан алгоритм управления частотно-регулируемым многодвигательным электроприводом конвейера, позволяющий обеспечить автоматическое регулирование отдельных двигателей с целью перераспределения нагрузки между ними и равномерность натяжения ленты по ее длине.
Создан экспериментальный стенд с применением частотно-регулируемого электропривода и реализацией синтезированных алгоритмов системы автоматического управления.
Публикации: По теме диссертации опубликовано 10 научных работ в периодических изданиях, в сборниках научных трудов и в сборниках тезисов докладов научно-технических конференций, в том числе 2 работы в изданиях, рекомендованных ВАК Минобрнауки. Подана заявка на патент.
Структура и объем работы. Диссертация состоит из введения, пяти глав, заключения, списка литературы из 178 наименований и 5 приложений. Основной текст диссертации изложен на 137 страницах, включает в себя 34 рисунка и 12 таблиц. Общий объем работы – 178 страниц.
СОДЕРЖАНИЕ РАБОТЫ
Во введении обоснована актуальность темы работы, сформулирована идея работы, на основании которой определены цель и основные задачи исследования, а также научная новизна и практическая ценность результатов работы.
В первой главе проведен краткий анализ состояния, специфических особенностей эксплуатации и алгоритмов управления существующих систем шахтных ленточных конвейеров. Сформулированы общие задачи и требования по управлению многоконвейерной технологической линией.
Во второй главе обоснован выбор асинхронного электропривода с использованием полупроводниковых частотных преобразователей. Разработана математическая модель системы электропривод – конвейер и модель управления поточно-транспортной системой, состоящей из нескольких последовательно и параллельно включенных конвейеров. Проведен сравнительный анализ алгоритмов для локальных контроллеров частотного управления электроприводом. В качестве алгоритма управления принят алгоритм с прямым цифровым управлением моментом.
В третьей главе рассматривается возможность построения микропроцессорной системы управления комплексом конвейерных линий. Приведены технические требования к аппаратным средствам и организации связи системы верхнего уровня и локальных систем управления электроприводами. Предложены алгоритм работы и структура системы управления конвейерным частотным электроприводом.
В четвертой главе приведено описание и результаты исследования режимов работы на лабораторно-экспериментальной установке, являющейся макетом системы многодвигательного частотно-регулируемого асинхронного электропривода, с реализацией синтезированных алгоритмов системы автоматического управления (САУ).
В пятой главе рассматривается организация и структура системы контроля и диагностики комплекса электроприводов конвейерной линии. Обосновывается возможность повышения коэффициента готовности за счет снижения времени восстановления. Даются рекомендации по аппаратному обеспечению.
Заключение отражает обобщенные выводы по результатам исследований в соответствии с целью и решенными задачами.
На основании проведенных исследований сформулированы следующие научные положения.
1. Разработанная математическая модель системы «частотно-регулируемый многодвигательный электропривод – конвейер – система управления конвейерами», учитывающая динамические процессы, происходящие в элементах транспортной системы, обеспечивает оценку энергетической эффективности применения разработанных алгоритмов, что позволяет снизить динамические перегрузки в ленте на (15-20)%.
Показано, что для перспективных конвейерных систем определёнными преимуществами обладает схема с асинхронными регулируемыми электроприводами с применением полупроводниковых преобразователей частоты.
Поскольку в диссертационной работе ставилась задача исследования электромеханических режимов работы привода, то при моделирования полупроводниковых преобразователей использовались упрощённые математические модели элементов (без детального изучения процессов, обусловленных коммутацией ключей преобразователя). Упрощённые модели позволяют решать задачи расчёта статических, механических и регулировочных характеристик электромеханических систем, а также задачи синтеза систем управления.
На основании выбранной схемы (рис.1) расположения конвейеров в многоконвейерной линии в приложении Simulink программы MatLab была разработана модель системы конвейер – многодвигательный электропривод в виде отдельных блоков, входы которых представляют собой управляющие и возмущающие воздействия для данного элемента системы, а выходы – переменные состояния, являющиеся предметом исследования или входными сигналами для других блоков.
Модель объекта была представлена следующими составляющими:
- Подсистема электропривод – конвейер (konv1-konv4), состоящая из механической (барабан, лента и т.д.) и электрической части конвейера (многодвигательный частотно-регулируемый электропривод).
- Блок формирования нагрузки конвейера (zagruzka1, zagruzka2).
- Блок системы управления многоконвейерной линией (Control).
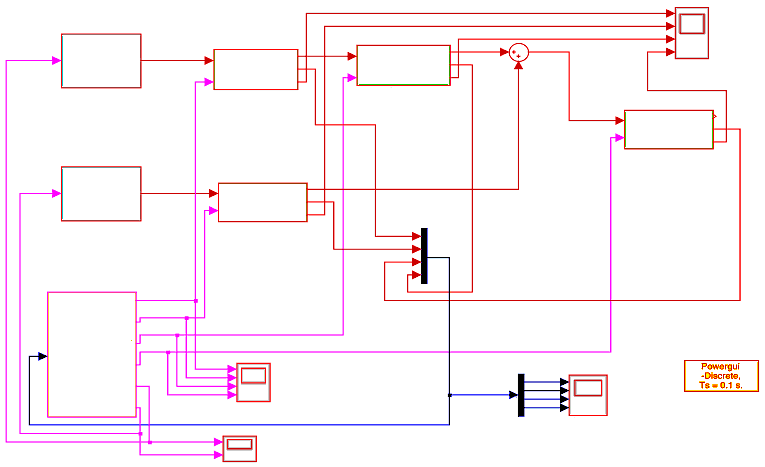

Рис. 1. Поточно-транспортная система (ПТС), состоящая из четырех конвейеров.
Математическая модель рассматриваемой поточно-транспортной системы представляет собой модель четырех конвейеров, три из которых включены последовательно (konv 1, 3 и 4) и один параллельно (konv 2). Помимо подсистем, содержащих модели конвейеров (konv 1, 2, 3, 4, рис.2), на рисунке представлены: блоки Zagruzka-1,2 (рис.7), моделирующие нагрузку с учетом вероятностного характера грузопотока; блок системы управления транспортной системой (CONTROL), на вход которой поступают сигналы (Is) от конвейеров, свидетельствующие о степени их загрузки, на выходе – управляющие воздействия (U1-U4) на конвейеры, а также сигналы Tm1 и Tm2, поступающие на блоки Zagruzka1,2 и позволяющие учитывать текущую загруженность поточно-транспортной системы.
Цифровая реализация работы поточно-транспортной системы выполнена на языке С в программе Matlab. С помощью модели поточно-транспортной системы можно анализировать режимы пуска конвейеров в заданном порядке с номинальным моментом до номинальной скорости, торможения, отработки конвейерами заданной нагрузки и получить зависимости (регистраторы w-1234, I_1234, Tm_12), определяющие загруженность отдельных конвейеров в системе и показывающие изменение скорости конвейеров в зависимости от нагрузки.
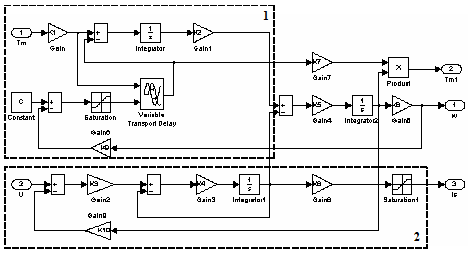
Рис. 2. Модель конвейера Simulink Matlab
Блок 1 моделирует изменение нагрузки на конвейере. На вход поступают сигналы «Tm» от блока «Zagruzka» (рис.1), учитывающего случайный характер грузопотока, и некоторое постоянное значение нагрузки «Constant». Блок 2 определяет реакцию конвейера на поступающий на вход сигнал «U» (управляющее воздействие от системы управления поточно-транспортной системой в зависимости от загрузки конвейера). На выходе модели Tm1 – нагрузка, поступающая на следующий конвейер (рис.1 блоки konv1-konv4), w – скорость движения ленточного полотна конвейера, которая выводится на регистратор (рис.1, регистратор w1234), Is - ток статора, по которому определяется степень загруженности конвейера (рис.1, регистратор I-1234).
Для определения адекватности математической модели привода конвейера в лаборатории кафедры электротехники и электромеханики СПГГИ (ТУ) был смонтирован макет многодвигательного частотно-регулируемого асинхронного электропривода (рис.3,4), параметры двигателей которого были заложены в модель.
Рис 3. Функциональная схема лабораторной установки для исследования частотно-регулируемого тягового асинхронного электропривода.
UZ1, UZ2, UZ3 – преобразователи частоты; H1, H2 – нагрузка (блоки сопротивлений); QF1..3 – автоматические выключатели; М1, М2, М3 – испытуемые двигатели; М4, М5 – нагрузочные машины; LV – обмотки возбуждения; КИА1..5 – измерительная аппаратура; PLC – контроллер; РС –персональный компьютер.

Рис.4. Фотография щита управления лабораторной установкой
Рис. 5. Характеристики изменения тока статора и момента на валу двигателя при изменении нагрузки
а) экспериментальные характеристики;
б) характеристики, полученные на модели.
Сопоставление результатов моделирования и экспериментальных данных показало, что максимальное расхождение расчётных и фактических характеристик электропривода (токи и напряжения асинхронных приводов, токи нагрузочных машин в режиме имитации разгона конвейера до полной скорости и последующей остановкой) не превышает ±16 %. Данное обстоятельство позволяет сделать вывод об удовлетворительной сходимости результатов, а следовательно, об адекватности математической модели реальному объекту.
На рис. 5 представлены кривые изменения тока и момента на валу двигателя при приложении нагрузки, которая задавалась изменением тока нагрузочных двигателей М3 и М4. Сопоставление результатов моделирования показало, что рассогласование между полученными расчетными и экспериментальными кривыми составляет не более 10%.
С помощью представленной математической модели была произведена отладка системы прямого управления моментом для многодвигательного асинхронного электропривода конвейера.
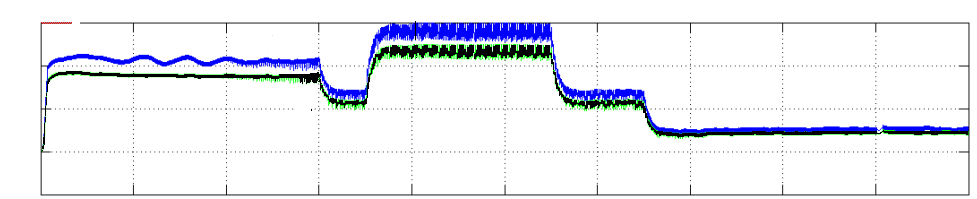
Рис.6. Кривые изменения момента при пуске, сбросе и набросе нагрузки
 - существующая система управления приводами конвейеров;
- существующая система управления приводами конвейеров; - система прямого управления моментом.
- система прямого управления моментом.На рис. 6 приведены кривые изменения момента при пуске под номинальной нагрузкой, сбросе и набросе нагрузки, иллюстрирующие снижение динамического момента на (15-20)% по сравнению с существующими системами управления приводами конвейеров.
2. Алгоритм формирования сигналов задания в системе управления многодвигательным асинхронным электроприводом, позволяющий учитывать случайный характер грузопотока, повышает равномерность перераспределения нагрузки между приводными двигателями до 90% и исключает проскальзывание ленты при изменении условий работы конвейера.
Электропривод конвейера по условиям эксплуатации имеет ряд специфических особенностей, накладывающих дополнительные требования на выбор алгоритма управления: обеспечение плавного пуска с ограничением кратковременных ускорений; необходимость создания пускового момента, в несколько раз превышающего номинальный; минимизация времени пуска и торможения с ограничением динамических натяжений ленты и отсутствием пробуксовки ленты.
В качестве локальных алгоритмов управления многодвигательным электроприводом использовался алгоритм прямого управления моментом, обеспечивающий максимальное быстродействие по контуру тока (момента) и ограничение максимального значения тока (до номинального момента).
Особенностью конвейерного транспорта как технологической системы является случайность поступления грузопотока от смежного технологического оборудования.
В
1
2
 пакете Simulink программы Matlab была создана модель нагрузки (рис.7), имитирующая случайный грузопоток, поступающий на конвейер.
пакете Simulink программы Matlab была создана модель нагрузки (рис.7), имитирующая случайный грузопоток, поступающий на конвейер. 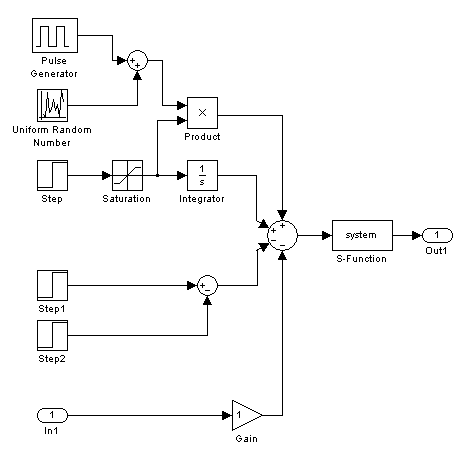
Рис.7. Модель грузопотока
Блок 1 моделирует грузопоток в виде дискретной последовательности импульсов со случайной длительностью поступления груза и со случайными интервалами его отсутствия. В пределах длительности импульсов грузопоток описан как непрерывный случайный процесс.
Блок 2 моделирует сброс нагрузки с конвейера.
Блок 3 моделирует поступление нагрузки от других конвейеров, входящих в став.
Блок 4 представляет написанную в программе Matlab на языке С s-функцию, описывающую распределение грузопотока.
РС1
РС2
АИН1
АИН2
АД1
АД2
Is abc
Is abc
Us abc
Us abc
Wr
Ψs
(-)
(-)
(-)
(-)
(-)
(-)
Md
Md
Ψs
Ψs
Md
Md
Wr
Wr
РПС1
РПС2
РМ1
РМ2
Т1
Т2
В1
В1
В2
В2
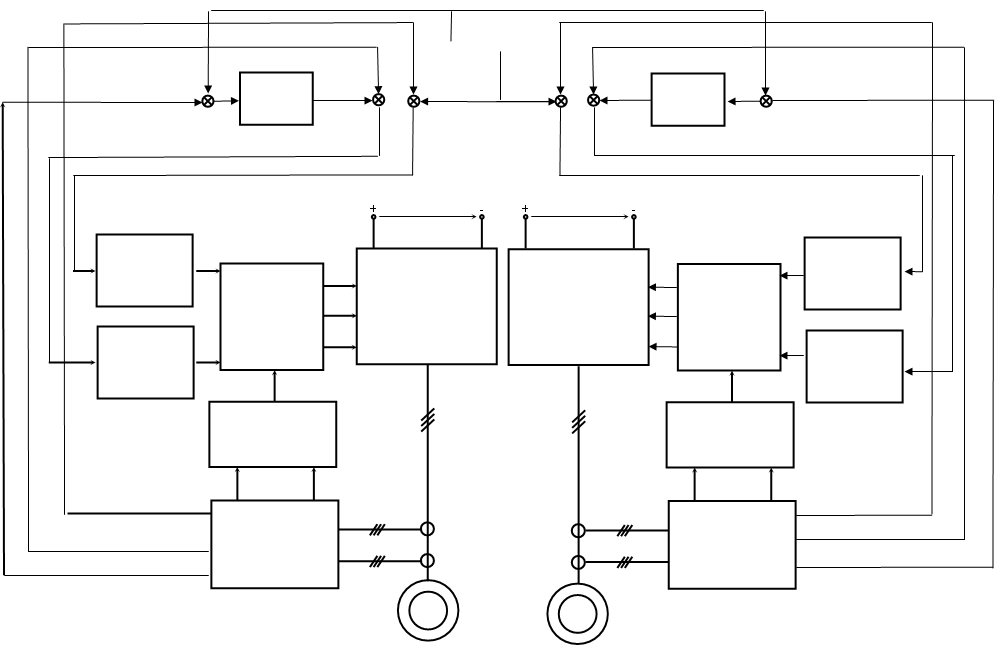
Рис.8. Структурная схема модели многодвигательного асинхронного частотно-регулируемого электропривода с системой прямого управления моментом
РС1,2 – регуляторы скорости; АИН1,2 – автономные инверторы напряжения; Т1,2 – таблицы переключения ключей автономного инвертора; РПС1,2 – регуляторы потокосцепления статора; РМ1,2 – регуляторы электромагнитного момента; В1,2 – вычислители угла поворота вектора потокосцепления статора, момента, потокосцепления статора двигателя и скорости вращения ротора
Алгоритм формирования сигналов задания в системе управления многодвигательным асинхронным электроприводом, учитывающий случайный характер нагрузки, заключается в следующем: величина рассогласования по нагрузке (фактический ток с полупроводниковых преобразователей) используется для корректировки задания скорости отдельных приводов.
Алгоритм корректировки сигналов задания приведен на рис.9.
а. Если
 , то
, то  , то корректирующий сигнал равен 0.
, то корректирующий сигнал равен 0.б. Если
 , то
, то  . Задание на регулятор скорости (РС1) снижается, а на РС2 увеличивается.
. Задание на регулятор скорости (РС1) снижается, а на РС2 увеличивается. в. Если
 , то
, то  . Задание на регулятор скорости (РС1) увеличивается, а на РС2 снижается.
. Задание на регулятор скорости (РС1) увеличивается, а на РС2 снижается. Коэффициент K регулирует эффективность уравнивания моментов.
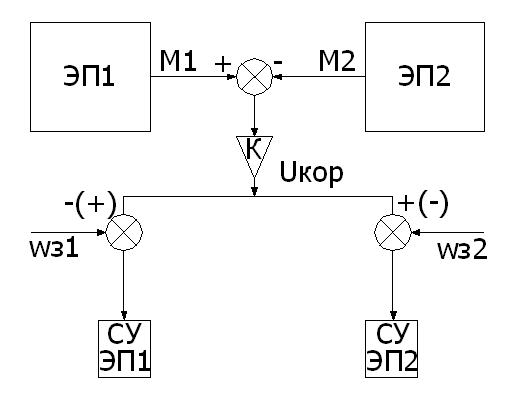
Рис.9. Алгоритм корректировки сигналов задания
ЭП1,2 – электроприводы, Uкор – корректирующий сигнал, wз1,2 – задания скорости, СУ ЭП1,2 – системы управления электроприводами.
Рис.10 иллюстрирует кривые момента и скорости привода переменного тока при случайной нагрузке в режиме пуска на полную скорость с последующим торможением до полной остановки и при ступенчатом набросе нагрузки. Из приведенных кривых видно, что при использовании разработанного алгоритма снижается перерегулирование и колебания момента, а, следовательно, и скорости.
Выполненные исследования режимов работы привода показали, что введение алгоритма корректировки задания скорости отдельных приводов обеспечило повышение равномерности распределения нагрузки между приводными двигателями (рассогласование составляет не более 10%), ограничение перерегулирования момента двигателя (до 15%), а значит, ограничение динамических нагрузок на привод конвейера при использовании алгоритма прямого управления моментом и исключение проскальзывания ленты при изменении условий работы конвейера.
800
120
Рис.10. Кривые момента и скорости привода без корректировки сигналов (А) и с разработанным алгоритмом (Б).
Эффективность работы электропривода определяется показателями надежности оборудования. Повышение надежности по критерию обеспечения требуемого коэффициента готовности требует разработки и использования систем контроля и диагностики. В работе обосновывается возможность повышения коэффициента готовности за счет снижения времени восстановления.
Исследования показали, что при внедрении системы управления, контроля и диагностики оборудования комплекса многоконвейерных линий с использованием разработанных алгоритмов коэффициент готовности
 повышается.
повышается.ЗАКЛЮЧЕНИЕ
В диссертации, представляющей собой законченную научно-квалификационную работу, на основе выполненных теоретических и экспериментальных исследований решена актуальная практическая задача повышения энерго- и ресурсосбережения конвейерного транспорта путем реализации разработанных алгоритмов и системы управления асинхронным частотно-регулируемым многодвигательным электроприводом конвейерного транспорта.
Основные научные и практические результаты заключаются в следующем:
- Для повышения энерго- и ресурсосбережения конвейерного транспорта целесообразен переход на регулируемый асинхронный электропривод с полупроводниковыми преобразователями частоты и управлением режимами работы многоконвейерной линии с учетом технологических требований и случайного характера грузопотока.
- Математическая модель электромеханической системы конвейер – многодвигательный асинхронный частотно-регулируемый электропривод с реализацией в среде Simulink пакета программ MatLab позволяет выполнить исследования режимов работы электропривода конвейера с учетом специфики работы механизма при различных алгоритмах управления электроприводом.
- Показана целесообразность использования локального цифрового управления моментом асинхронного двигателя с разработанным алгоритмом корректировки сигналов задания, обеспечивающего повышение равномерности распределения нагрузки между приводными двигателями и ограничение динамических нагрузок на ленту (перерегулирование момента до 15%).
- Микропроцессорная система управления многоконвейерной линией на базе микроконтроллеров и полупроводниковых преобразователей частоты обеспечивает повышение эксплуатационных характеристик и надежности конвейера (
 ).
).
Содержание диссертации отражено в следующих основных публикациях:
- Черемушкина М.С. Структура и алгоритмы управления и автоматизации при использовании мощных электромеханических комплексов с полупроводниковыми преобразователями / Черемушкина М.С., Козярук А.Е. // Записки Горного института. Том 177. Новые технологии в металлургии, обогащении, автоматизации и управлении. СПб, 2008., стр.69-74
- Черемушкина М.С. Повышение безопасности и эффективности управления многодвигательным электроприводом конвейерного транспорта / Черемушкина М.С., Козярук А.Е. // В сб.: Известия Самарского научного центра Российской академии наук. Т.2, 2007., стр. 108-112.
- Черемушкина М.С. Использование сетевых технологий управления многодвигательным электроприводом // Сборник трудов XXXIV Неделя науки СПбГПУ: материалы всероссийской межвузовской научно-технической конференции студентов и аспирантов / СПб.: Изд-во Политехнического университета, 2005, Ч.V., стр. 146-147.
- Черемушкина М.С. Создание электромеханической модели поточно-транспортной конвейерной системы в пакете Simulink Matlab // Технологии Microsoft в теории и практике программирования. Материалы межвузовского конкурса-конференции студентов, аспирантов и молодых ученых Северо-Запада. СПб: Изд-во Политехнического университета, 2006., стр. 146-148.
5. Черемушкина М.С. Контроль и управление многодвигательным электроприводом конвейерного транспорта / Черемушкина М.С., Козярук А.Е. // Сборник трудов XXXV Неделя науки СПбГПУ: материалы всероссийской межвузовской научно-технической конференции студентов и аспирантов / СПб.: Изд-во Политехнического университета, 2006, Ч.V., стр. 146-148.
6. Черемушкина М.С. Совершенствование систем электропривода конвейерного транспорта / Черемушкина М.С., Козярук А.Е. // Сборник трудов XXXVII Неделя науки СПбГПУ: материалы всероссийской межвузовской научно-технической конференции студентов и аспирантов / СПб.: Изд-во Политехнического университета, 2008, Ч.V., стр. 167-168.