
Датчики автоматизированных электроприводов
| Вид материала | Лекция |
- Разработка методики анализа надежности автоматизированных электроприводов прокатных, 289.64kb.
- Тема: «полупроводниковые датчики температуры», 242.02kb.
- Системы управления регулируемых электроприводов (курсовой проект), 16.86kb.
- Перспективы развития моделирования частотно-регулируемых электроприводов для нефтегазопромыслового, 63.23kb.
- 090303. 65 Информационная безопасность автоматизированных систем, 33.45kb.
- Программа курса обучения. Тема «датчики компании альбатрос», 41.68kb.
- План занятий третьего года обучения, по специальности «Программное обеспечение вычислительной, 103.35kb.
- Методические указания к курсовому проектированию по дисциплине проектирование автоматизированных, 690.29kb.
- Направление 090305 «Информационная безопасность автоматизированных систем» Информационная, 17.19kb.
- Электропривод летательных аппаратов, 410.46kb.
Лекция №6
Датчики автоматизированных электроприводов
Основные датчика в автоматизированном оборудовании можно разделить на следующие группы: 1) датчики положения: а) датчики линейного перемещения, б) датчики фиксированных положений; 2) датчики скорости; 3) датчики температуры (окружающей среды, рабочей жидкости и др.); 4) датчики усилия (например, усилия резания по цифровому датчику давления).
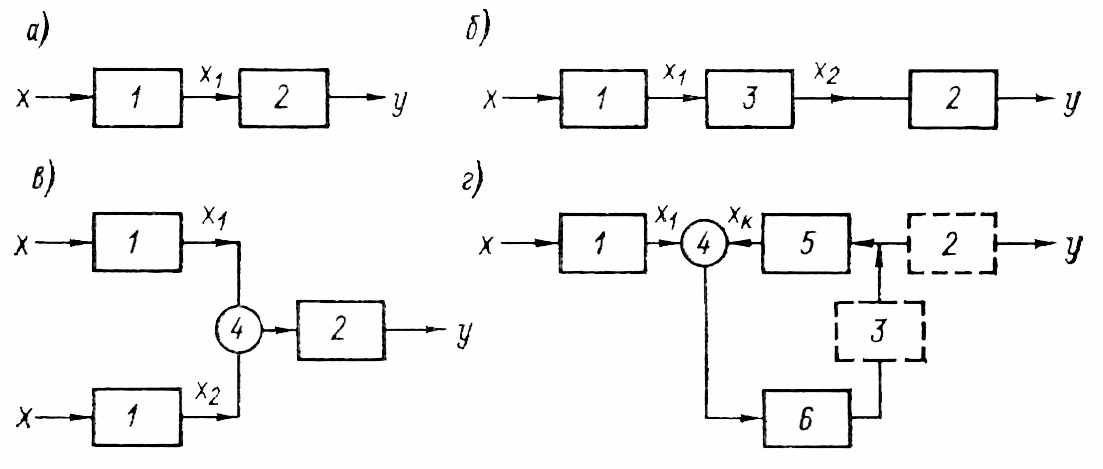
Рис. 0. Структурные схемы датчиков: а – двухзвенного; б – со схемой каскадного соединения; в – с дифференциальной схемой;
г – с компенсационной схемой;
1 – чувствительный элемент; 2 – выходной преобразователь; 3 – промежуточный преобразователь; 4 – вычитающий элемент; 5 – усилитель; 6 – генератор компенсирующей величины
Сельсины
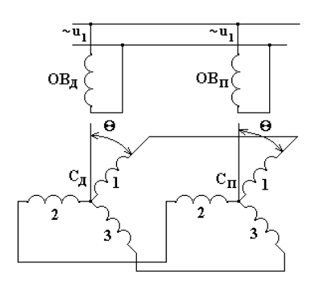
Рис.1
Сельсином называется информационная электрическая машина переменного тока, вырабатывающая напряжения, амплитуды и фазы которых определяются угловым положением ротора. Сельсины позволяют осуществить без общего механического вала согласованное вращение или поворот механизмов. Известны два режима работы сельсинов: индикаторный и трансформаторный. При работе сельсинов в индикаторном режиме происходит передача на расстояние угла поворота механической системы. При работе сельсинов в трансформаторном режиме передается сигнал, воздействующий на исполнительный механизм таким образом, чтобы заставить его отработать заданный поворот.
Рассмотрим устройство и принцип действия однофазных двухполюсных контактных сельсинов. Однофазная обмотка возбуждения, включенная в сеть переменного тока, расположена на явнополюсном статоре. На роторе размещены три пространственно смещенные относительно друг друга под углом 120o катушки синхронизации. Концы катушек соединены в общий узел, начала катушек выведены на контактные кольца. Обмотка возбуждения создает пульсирующий магнитный поток. Этот поток индуктирует трансформаторные ЭДС в катушках синхронизации. Наибольшая ЭДС индуктируется в катушке, ось которой совпадает с осью пульсирующего потока. При отклонении оси катушки ЭДС уменьшается по синусоидальному закону. Величина и фаза ЭДС в каждой катушке зависит от угла поворота ротора сельсина.
На рис.1 приведена схема соединения однофазных сельсинов при индикаторном режиме работы.
В схеме используются сельсин - датчик и сельсин - приемник, представляющие собой два совершенно одинаковых сельсина.
ОВд и ОВп - обмотки возбуждения сельсина - датчика и сельсина - приемника.
Сд и Сп - катушки синхронизации.
Если роторы обоих сельсинов ориентированны одинаковым образом относительно обмоток возбуждения, то в каждой паре катушек индуктируются одинаковые ЭДС. Катушки роторов обоих сельсинов соединены таким образом, что ЭДС в них направлены встречно друг другу, и ток в соединительных проводах отсутствует. Такое положение сельсинов называется согласованным. Если повернуть ротор сельсина - датчика на угол θ, то в соответствующих катушках роторов наводятся различные по величине ЭДС, и в них возникают токи, которые, взаимодействуя с магнитными полями обмоток возбуждения, создают вращающие моменты. Ротор датчика удерживается в повернутом положении, следовательно, ротор приемника будет поворачиваться до тех пор, пока не исчезнет вращающий момент, т.е. пока не исчезнут токи в катушках сельсина, а это произойдет, когда ротор сельсина - приемника повернется на тот же угол θ, возникнет новое согласованное положение роторов сельсина - датчика и сельсина - приемника. На роторе сельсина - приемника устанавливаются стрелка и шкала, показывающие угол поворота сельсина - датчика.
Если необходимо осуществить дистанционную передачу угла поворота к механизму, требующему большого вращающего момента, то используется схема трансформаторного режима работы сельсинов (рис.2).
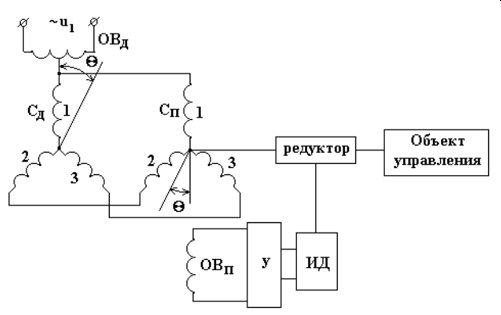
Рис.2
Обмотка возбуждения сельсина - датчика подключается к источнику однофазного тока. Катушки синхронизации датчика соединены с катушками синхронизации приемника, который работает как сельсин - трансформатор. Катушки синхронизации СП являются первичной обмоткой, а статорная обмотка ОВП - вторичной (выходной) обмоткой. Она через усилитель «У» соединяется с исполнительным двигателем. Исполнительный двигатель через редуктор связан с валом сельсина - приемника. Обмотка возбуждения датчика образует пульсирующий по горизонтали магнитный поток. В катушках СД индуктируются ЭДС, которые создают токи в роторных катушках датчика и приемника. Каждая катушка синхронизации сельсина - приемника создает свой магнитный поток, а результирующий магнитный поток имеет такое же направление, как и поток в сельсине - датчике. В обмотке возбуждения сельсина - приемника индуктируется ЭДС, величина и фаза которой зависят от угла и направления результирующего потока обмотки синхронизации приемника. Ось обмотки возбуждения приемника сдвинута на 90o относительно оси обмотки возбуждения датчика, поэтому, когда магнитный поток направлен горизонтально, в обмотке приемника ОВП не возникает никакой ЭДС. Это согласованное положение в трансформаторном режиме. Если ротор сельсина - датчика повернуть на угол θ, то результирующий магнитный поток в роторе сельсина - приемника повернется тоже на угол θ, а на зажимах обмотки ОВП появится напряжение, зависящее от угла θ. Это напряжение подается на вход усилителя, а затем на исполнительный двигатель. Двигатель вращается, поворачивая обмотки управления. Вал ротора сельсина - приемника через редуктор связан с валом объекта управления. Когда вал объекта управления повернется на нужный угол, одновременно с ним повернется на угол θ вал сельсина - приемника. Возникнет новый согласованный режим, и движение прекращается.
Исполнительный механизм и сельсин - датчик не нуждаются в механической связи и могут находиться на большом расстоянии друг от друга. Электрические системы дистанционной передачи угла поворота или вращения механизмов используются в радиолокаторах, в радиопеленгаторах и другой специальной технике.
Поворотные трансформаторы. Индуктосины. Редуктосины
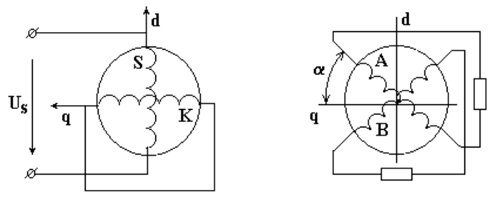
Рис.3
Синусно-косинусный вращающийся трансформатор, резольвер (angle-component solver) - синусно-косинусный датчик угла, представляющий трансформатор, состоящий из ротора и статора, несущих по паре взаимно-перпендикулярных обмоток. При повороте ротора в зависимости от режима работы изменяются амплитуды (пропорционально синусу и косинусу угла поворота) или фаза напряжения вторичных обмоток.
Различают: 1) синусно-косинусные поворотные трансформаторы (СКПТ), которые выдают два напряжения, изменяющиеся по гармоническому закону Us= Umsina и Uc = Umcosa; 2)линейные поворотные трансформаторы (ЛПТ), выходное напряжение которых изменяется по закону U = ka.
Поворотным, или вращающимся, трансформатором называется информационная электрическая машина, амплитуда выходного напряжения которой является функцией входного напряжения и углового положения ротора. Поворотные трансформаторы конструктивно сходны с асинхронными машинами с фазным ротором и контактными кольцами. К ним обычно подводится питание со стороны статора от источника переменного напряжения. На обмотке ротора (на выходе) получают напряжение, представляющее собой определенную функцию угла поворота ротора α. Обычно требуется, чтобы это напряжение было пропорционально sinα, cosα. В соответствии с этим, различают синусные, косинусные и синус - косинусные трансформаторы.
На рис.3 представлена принципиальная схема поворотного трансформатора с двумя взаимно-перпендикулярными обмотками на статоре и на роторе.
Назовем оси обмоток статора S и K соответственно продольной d и поперечной q осями поворотного трансформатора. Статорную обмотку S подключим к источнику переменного напряжения. Обмотка создает продольное пульсирующее магнитное поле, которое будет индуктировать в роторных обмотках А и В ЭДС. Значения электродвижущих сил зависят от угла поворота ротора α.
При синусоидальном распределении поля вдоль окружности ротора напряжение на обмотке А будет меняться при повороте ротора пропорционально sinα, а напряжение на обмотке В - пропорционально cosα. При использовании обеих обмоток ротора получим синус - косинусный поворотный трансформатор.
Токи в роторных обмотках создают продольную составляющую магнитного потока, направленную встречно магнитному потоку статорной обмотки S, и поперечную составляющую потока, направленную перпендикулярно магнитному полю обмотки S. Вследствие появления поперечной составляющей, нарушится синусоидальный и косинусоидальный законы изменения ЭДС от угла поворота ротора α.
Для компенсации полученной составляющей магнитного поля роторных обмоток на статоре размещается компенсационная обмотка К, замкнутая накоротко, под углом 90o к обмотке S.
Эта обмотка создает магнитный поток, направленный встречно поперечной составляющей магнитного потока ротора, и ослабляет ее. В результате, погрешность поворотного трансформатора уменьшается.
К поворотным трансформаторам предъявляются весьма высокие требования в отношении точности соблюдения указанных зависимостей вторичных напряжений от угла α. Эти требования могут быть удовлетворены только при применении специальных обмоток, обеспечивающих близкие к синусоидальным кривые их н.с., при слабом насыщении стальных участков магнитной цепи поворотного трансформатора и при самом тщательном изготовлении его деталей. Кроме того, большое значение имеет правильный выбор чисел пазов статора и ротора и применение скоса пазов ротора или статора.
Напряжения на зажимах вторичных обмоток и при их нагрузке будут пропорциональны sinα и cosα, если эти обмотки и приключенные к ним внешние сопротивления одинаковы. При таком выполнении схемы получается так называемое симметрирование поворотного трансформатора на вторичной стороне. В этом случае поперечные н.с. обеих обмоток ротора, действующие всегда в противоположные стороны, равны между собой при любом α. Здесь, следовательно, не будет возникать поперечный поток, который в обмотке А создавал бы э.д.с., пропорциональную cos2α, а в обмотке В — э.д.с., пропорциональную sin2α. Кроме того, при указанном симметрировании вторичных цепей ротора сумма продольных н.с. его обеих обмоток не будет зависеть от угла α, поэтому и ток в обмотке S статора при Us = const будет сохранять свое значение, что приводит к постоянному значению продольного потока, не зависящему от угла α. Обмотка K на статоре замыкается обычно накоротко или на сопротивление, равное сопротивлению источника однофазного тока, если мощность его невелика. В этом случае получается симметрирование поворотного трансформатора на первичной стороне, которое также препятствует возникновению поперечного потока, например при некотором различии внешних сопротивлений вторичных цепей.
Схема линейного поворотного трансформатора приведена на рис.4.
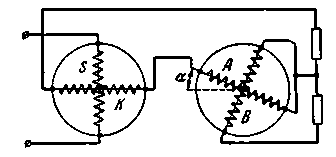
Рис.4. Схема соединений обмоток линейного поворотного трансформатора.
При такой схеме, где также применяется симметрирование на вторичной стороне, удается получить линейную зависимость напряжения на зажимах последовательно соединенных обмоток K и А от угла поворота ротора а с точностью до 0,1% примерно в пределах изменения α от - 37 до + 37°.
Индукционный редуктосин представляет собой бесконтактный синус - косинусный поворотный трансформатор. Первичная и две вторичные обмотки размещены на статоре. Ротор выполнен в виде зубчатого кольца из электротехнической стали.
Редуктосины не имеют скользящих контактов, что повышает надежность и точность их работы. При питании первичной обмотки синусоидальным напряжением со вторичных обмоток снимают два напряжения, амплитуды которых изменяются в функции угла поворота ротора. Повороту ротора на угол, равный зубцовому делению, соответствует полный период изменения амплитуды выходного напряжения (зубцовым делением ротора называется расстояние между зубцами ротора). Индуктосином называют бесконтактную информационную машину без магнитопровода с печатными первичной и вторичной обмотками, возбуждаемую однофазным напряжением. Выходное напряжение индуктосина является функцией углового положения ротора. Конструктивно индуктосин представляет собой два диска (ротор и статор) из изоляционного материала (керамика, стекло). Один из дисков соединяется с валом, угловое положение которого подлежит изменению, второй неподвижен. На торцевых поверхностях, обращенных друг к другу, диски несут печатные обмотки.
Поворотные трансформаторы используются в электрических счетно-решающих системах, в следящих системах в качестве датчиков угла, в преобразователях "угол-код", в системах числового и программного управления металлорежущими станками.
Резольвер
Резольвер (рис.5) работает по принципу вращающегося трансформатора. У вращающегося трансформатора ротор состоит из катушки (обмотки), которая вместе с обмоткой статора образует трансформатор. Принципиально резольвер устроен точно так же с той лишь разницей, что статор выполнен не из одной, а из двух расположенных под углом 90 градусов друг к другу обмоток. Резольвер служит для определения абсолютного положения вала двигателя внутри одного оборота. Кроме того, по сигналу резольвера определяется значение скорости и моделируется инкрементный датчик для регулирования положения.
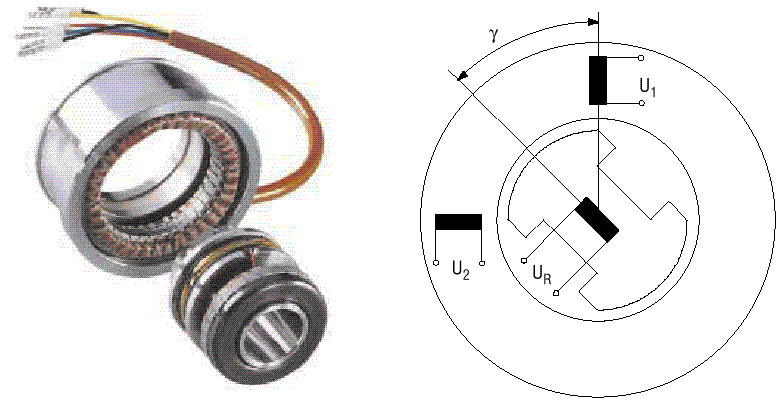
Рис.5. Резольвер Рис.6. Схематическое устройство
Ротор резольвера закреплен на валу двигателя. Для того чтобы можно было передавать переменное несущее напряжение на ротор без щеток, на статоре и роторе размещены дополнительные обмотки. По двум выходным синусоидальным напряжениям U1 и U2 , сдвинутым на 90 градусов (рис.6), можно определить угол поворота ротора, скорость и инкрементный сигнал по положению (моделирование инкрементного датчика – импульсы одинаковой длительности - однотипные).
Модель инкрементного датчика.
Из выходных сигналов резольвера создается 6 выходных сигналов, которые используются управлением верхнего уровня для позиционирования. Выходы этих каналов А, В и С (рис.7) и их инверсные сигналы
 .
.Модель инкрементного (вырабатывают выходной сигнал, представляющий собой последовательность импульсов прямоугольной формы) датчика выдает 1024 импульса (однотипные импульсы) на один оборот. Они позволяют системе управления позиционированием с помощью импульсного умножителя частоты удваивать или учетверять разрешающую способность. Тем самым можно один оборот двигателя разделить на 4096 импульсов.
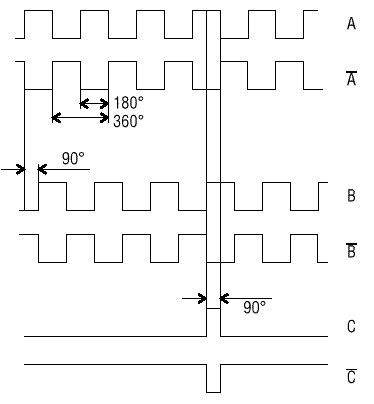
Рис.7. Моделирование инкрементного датчика
Импульсы каналов А и В сдвинуты относительно друг друга на 90 электрических градусов. При движении направо положительные фронты импульсов канала А опережают такие же импульсы канала В и наоборот. Канал С за каждый полный оборот вала двигателя выдает один импульс, который можно использовать как опорный сигнал.
Фотоимпульсные датчики
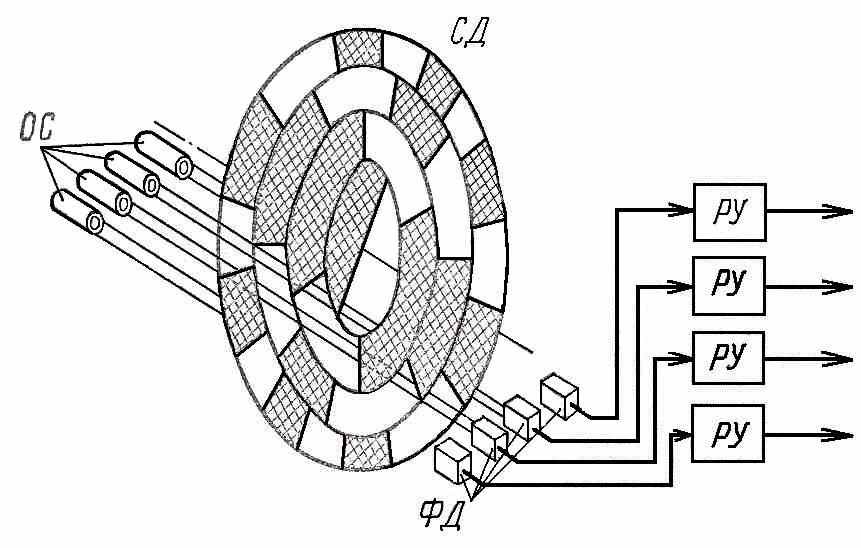
Рис. 14. Фотоэлектрический преобразователь угла поворота в цифровой код
Основным элементом фотоэлектрического датчика является стеклянный диск СД, вал которого соединяется с валом механического устройства. Диск разделен на несколько колец, количество которых соответствует количеству двоичных разрядов числа и определяет точность датчика. На рисунке – число разрядов равно 4. На практике применяют 10 и более разрядов. В свою очередь каждое кольцо разделено на ряд прозрачных и непрозрачных частей. Внутреннее кольцо, соответствующее старшему разряду числа, разделено на две части, из которых одна прозрачная, а вторая непрозрачная. Следующее кольцо разделено на четыре части и т.д. С одной стороны стеклянного диска СД расположены осветители ОС, дающие узкий параллельный пучок света; с другой стороны, против них – фотодиоды ФД. Количество фотодиодов и осветителей равно числу колец диска. Напряжения, снимаемые с фотодиодов, поступают на входы усилителей РУ с релейной характеристикой. Если фотодиод засвечен, то на выходе соответствующего усилителя имеется полное напряжение, что соответствует в цифровом коде +1; если не засвечен – то 0.
Таким образом, каждому углу поворота диска СД соответствует определенная комбинация уровней напряжений на выходах усилителей РУ, т.е. код числа.
Энкодеры
Энкодеры – преобразователи информации об абсолютном или относительном угловом положении вала в кодовый цифровой сигнал.
Абсолютный энкодер, как правило, отличается наличием уникальной комбинации меток в виде линий или секций переменной угловой ширины для каждого углового положения, а инкрементальный энкодер использует диск, на котором равномерно нанесены однотипные метки (за исключением, индексной), поскольку основная задача инкрементального устройства — детектирование пошагового перемещения с опорой на нулевую (индексную) метку при включении питания.
Энкодеры с большим интервалом между масштабными штрихами (с меньшим количеством штрихов) обеспечивают более высокую частоту выдачи данных, в то время как энкодеры с меньшим интервалом между штрихами (большим количеством штрихов), как правило, имеют более низкие ошибки интерполяции.
Строго говоря, угловыми энкодерами называются преобразователи угловых перемещений, имеющие 10 000 и более масштабных штрихов на оборот, точность которых не хуже 5 угловых секунд, а под «круговыми датчиками» подразумеваются энкодеры, которые не удовлетворяют этим критериям. Вместе с тем, зачастую угловым энкодером называют любой преобразователь угловых перемещений.
При изменении углового положения вала относительно его исходного состояния, инкрементальные энкодеры вырабатывают выходной сигнал, представляющий собой последовательность импульсов прямоугольной формы. Количество импульсов на оборот (разрешающая способность) пропорционально изменению углового положения вала и может достигать 10000 импульсов на один оборот.
Путем обработки сигнала от инкрементального датчика можно получить информацию о текущем значении угла поворота вала относительно опорной индексной отметки (методом последовательных приращений), а также об угловой скорости.
Главным недостатком инкрементальных энкодеров, в сравнении с абсолютными, является потеря инкрементальной угловой информации при сбоях питания (даже в системах с внешним относительно энкодера индексным каналом). Тем не менее, в системах с резервированием подачи питания данный недостаток является несущественным.

Рис. Изображение кодового диска инкрементального энкодера DKS40
Абсолютный энкодер, как правило, отличается наличием уникальной комбинации меток в виде линий или секций переменной угловой ширины для каждого углового положения, а инкрементальный энкодер использует диск, на котором равномерно нанесены однотипные метки (за исключением, индексной), поскольку основная задача инкрементального устройства - детектирование пошагового перемещения с опорой на нулевую (индексную) метку при включении питания. Полученные фотоприемниками световые пучки в дальнейшем обрабатываются переключающей электронной схемой - формирователем выходных импульсов.
Индуктивные датчики
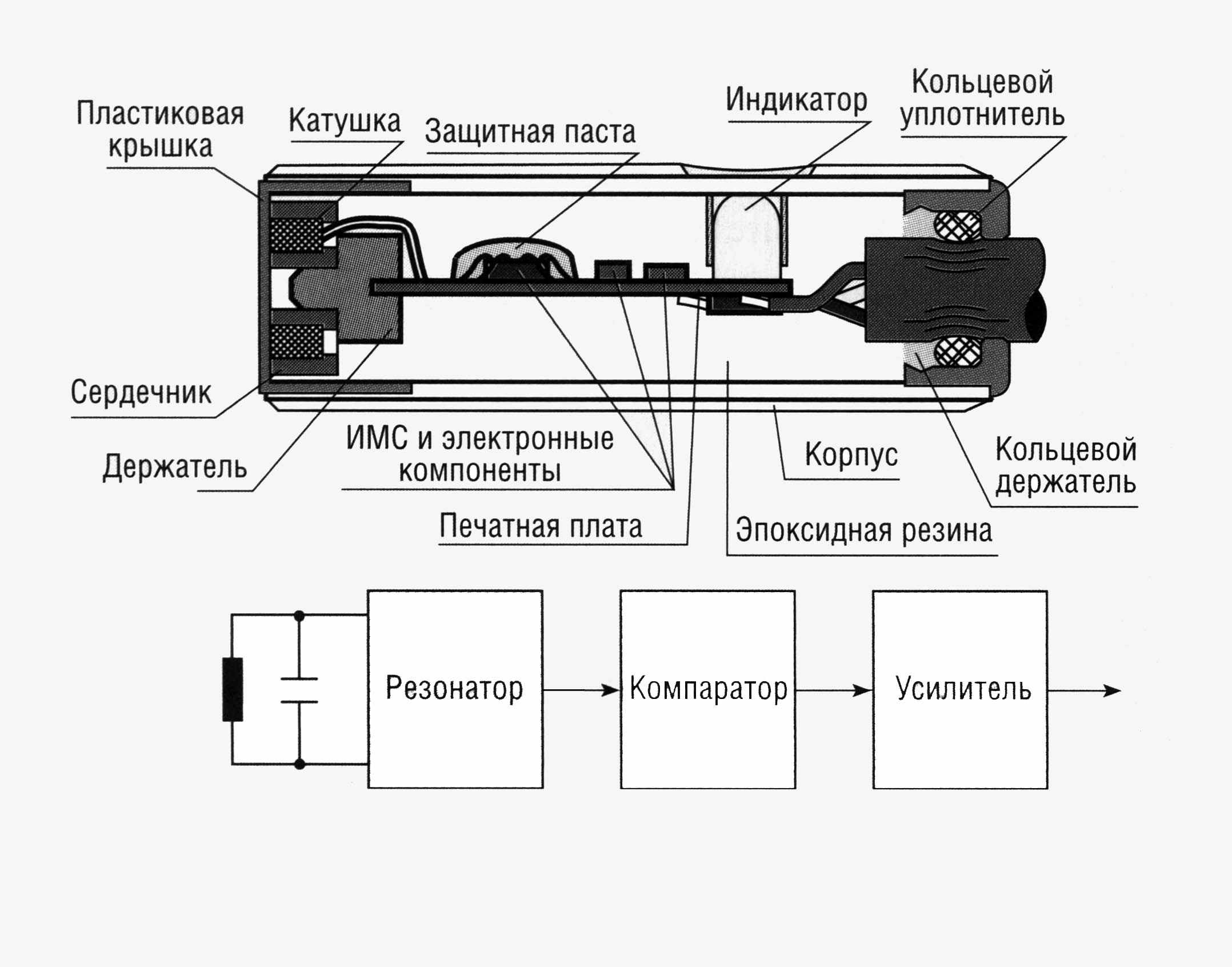
Рис.12. Устройство и функциональная схема индуктивного датчика
Или другая распространенная конструкция:
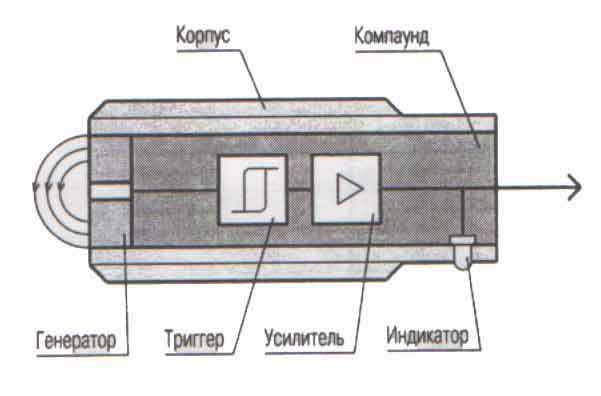
Рис.13
1. Генератор обеспечивает зону чувствительности выключателя.
2. Триггер обеспечивает необходимую крутизну фронта сигнала переключения и значение гистерезиса.
3. Усилитель увеличивает амплитуду выходного сигнала до необходимого значения.
4. Светодиодный индикатор покзывает включенное/выключенное состояние выключателя, обеспечивает контроль работоспособности, оперативность настройки и ремонта оборудования.
5. Компаунд обеспечивает необходимую степень защиты от проникновения твердых частиц и воды.
6. Корпус обеспечивает монтаж выключателя, защищает от механических воздействий. Выполняется из латуни или полиамида, комплектуется метизными изделиями
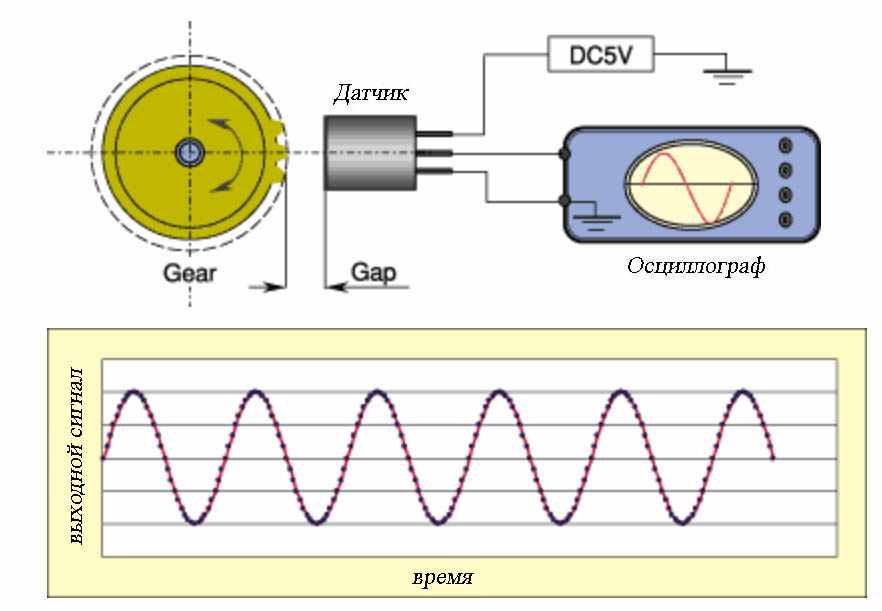
Индуктивные датчики срабатывают при приближении объектов из металла. Индуктивные выключатели наиболее эффективно использовать в качестве конечных выключателей в автоматических линиях, станках и т.п., т.к. они срабатывают только на проводящие материалы и не чувствительны ко всем остальным. Это увеличивает их защищенность от помех - введение в зону чувствительности выключателя рук оператора, эмульсии, воды, смазки и т.д. не приведет к ложному срабатыванию. В качестве управляющего объекта для индуктивных выключателей используются такие металлические конструктивы, как зубья шестерен, кулачки, ползуны; часто это металлическая пластина, прикрепленная к соответсвующей детали оборудования. Для настройки расстояния воздействия применяют пластину из стали, толщиной 1 мм. Пластина имеет форму квадрата со стороной более или равной значению диаметра выключателя. В случае применения конструктивов не из стали, а из других металлов, вводятся поправочные коэффициенты:
Чугун -1,1 Хром-никель -0,9 Латунь -0,4 Аллюминий -0,35
При установке индуктивных выключателей в реальную конструкцию, следует учитывать влияние окружающих неподвижных металлических элементов и других индуктивных выключателей.
Схемы работы датчиков фирмы «muRata»
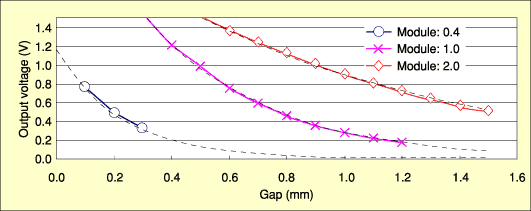
«Микрики»
Механические выключатели – обеспечивают срабатывание электроавтоматики станка при «замыкании» или «размыкании» контактов.
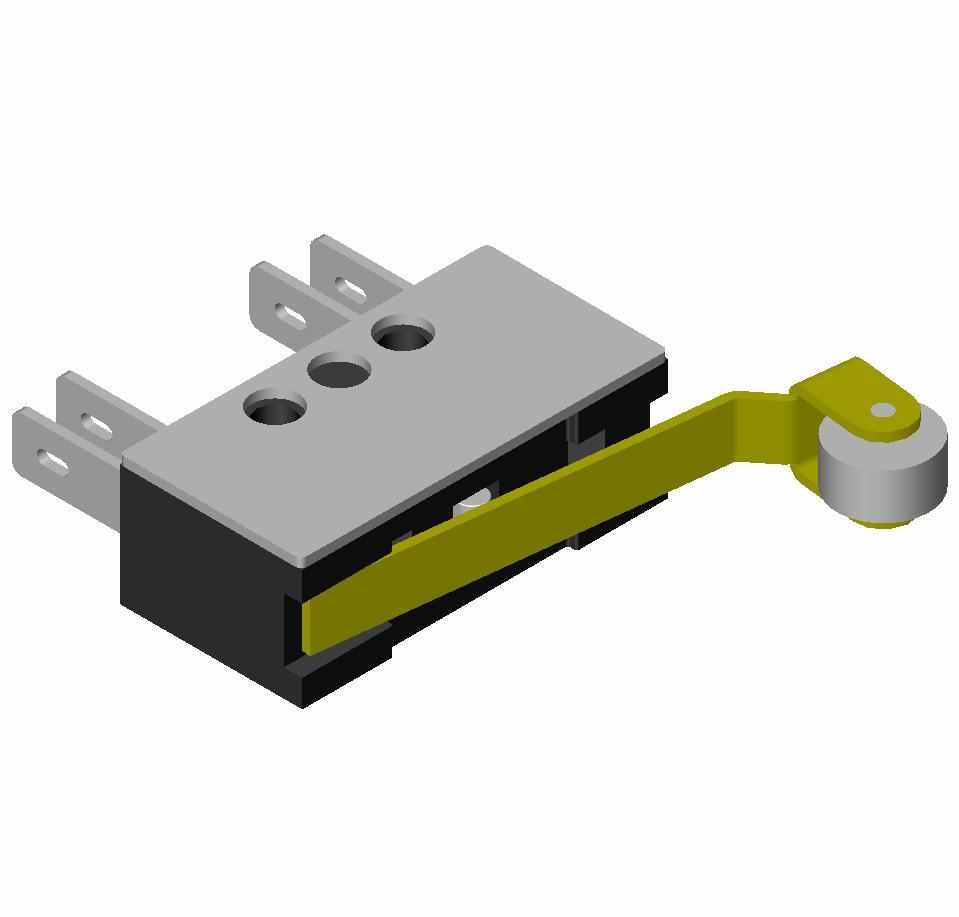
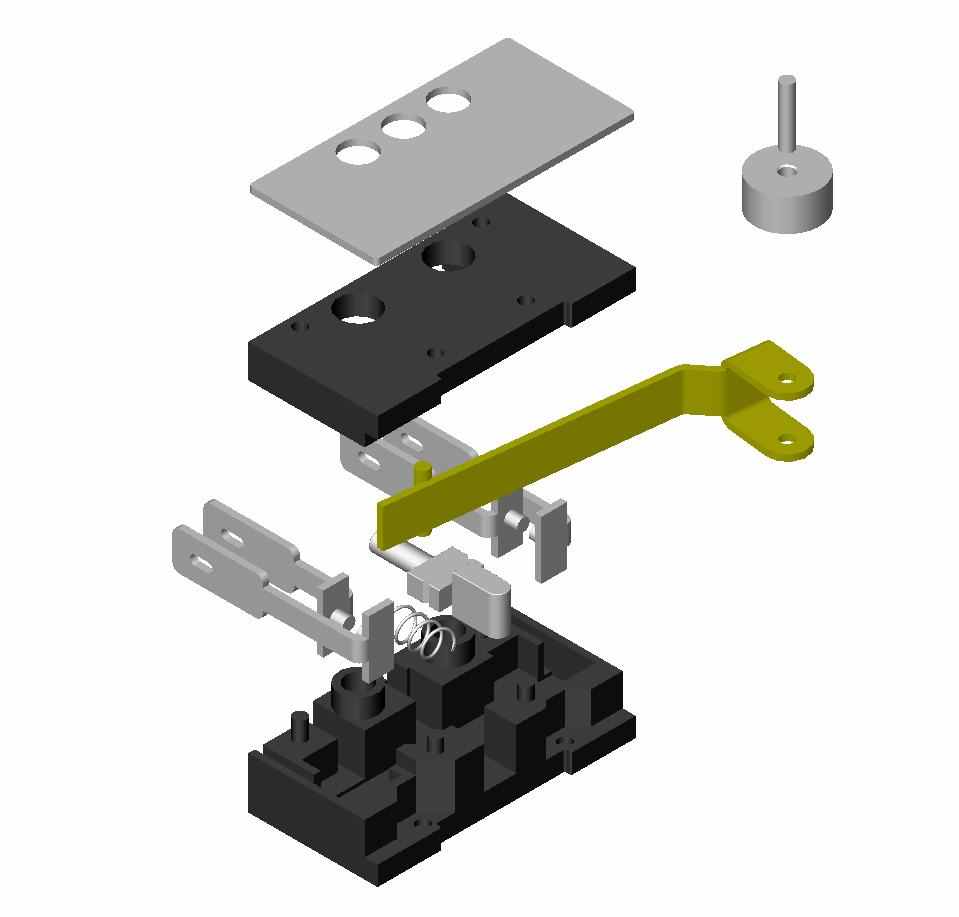
Рис. 15. Микроконтактные переключатели (выключатели)
Как правило используются как датчики крайних (конечных) положений.
Оптические линейки
С установленных на станке оптических линеек поступают сигналы единичных перемещений исполнительных механизмов (приводов координатных столов станка) на драйвер счетчика оптических преобразователей и далее данная информация обрабатывается программным обеспечением. Таким образом, система в каждый момент времени «знает» о реальном пространственном положении режущего инструмента и производит необходимую коррекцию перемещений, передаваемых от СЧПУ на шаговые приводы исполнительных механизмов станка. Принципиальным фактором в таком построении системы управления, является наличие обратной связи по координатам, что позволяет не просто «отрабатывать» заложенные в управляющей программе перемещения, но и компенсировать погрешности механических узлов станка.
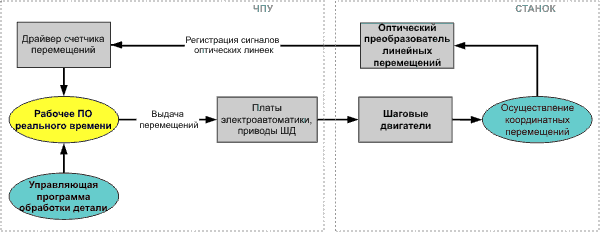
Рис. 16
Датчики скорости: ТАХОГЕНЕРАТОРЫ
Общие сведения
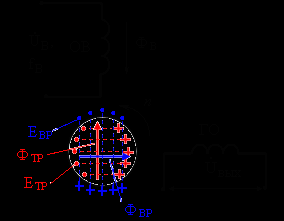
Рис.8. К вопросу о принципе действия асинхронного тахогенератора постоянного тока.
Тахогенераторами (ТГ) называются электрические машины небольшой мощности, преобразующие механическое вращение в электрический сигнал или тахогенератором называется информационная электрическая машина, предназначенная для выработки электрических сигналов, пропорциональных частоте вращения ротора. Тахогенераторы могут быть постоянного и переменного тока. Тахогенераторы постоянного тока представляют собой маломощные генераторы постоянного тока с независимым возбуждением или с возбуждением от постоянных магнитов. Выходное напряжение тахогенератора пропорционально частоте вращения ротора
Главное требование, предъявляемое к тахогенераторам, заключается в линейности выходной характеристики - пропорциональной зависимости между выходным напряжением U и угловой скоростью вращения n:
 , (1)
, (1)где: k, k’ - коэффициенты пропорциональности; φ - угол поворота.
Из уравнения (1) видно, что тахогенераторы можно использовать для измерения скорости вращения и для электромеханического дифференцирования, если за входной сигнал принять угол поворота ротора.
Асинхронный тахогенератор по конструктивному исполнению подобен асинхронному двигателю с полым немагнитным ротором. Он состоит из статора и неподвижного сердечника ротора, между которыми, в воздушном зазоре вращается тонкий полый немагнитный цилиндр. Принципиальная схема асинхронного тахогенератора показана на рис.9.
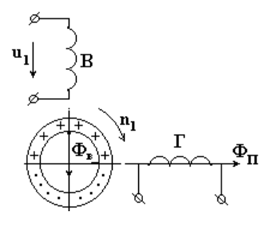
Рис.9
На статоре генератора размещены две обмотки, пространственно смещенные относительно друг друга на 90o. Одна из них, обмотка возбуждения B, подключена к источнику синусоидального напряжения, другая обмотка, являющаяся генератором Г, включается на измерительный прибор или на измерительную схему. Обмотка возбуждения создает пульсирующий магнитный поток Фв.
При неподвижном роторе ЭДС в генераторной обмотке равна нулю, так как вектор магнитного потока Фв перпендикулярен оси этой обмотки.
При вращении цилиндра пульсирующий магнитный поток индуктирует в нем ЭДС вращения. Под действием ЭДС в цилиндре появляются токи, направления которых указаны на рис.9. Токи создают по оси генераторной обмотки пульсирующий поперечный поток Фп. Этот поток индуктирует в генераторной обмотке ЭДС, пропорциональную частоте вращения цилиндра.
Асинхронные тахогенераторы, как и тахогенераторы постоянного тока, используются для измерения скорости вращения валов, а также для вырабатывания ускоряющих или замедляющих сигналов в автоматических устройствах.
Тахогенераторы постоянного тока
Рис.10. Тахогенератор постоянного тока
Тахогенераторы постоянного тока по конструкции и принципу действия представляют собой электрическую машину постоянного тока всегда с независимым возбуждением, чаше всего от постоянных магнитов (рис.10).
Если учесть падение напряжения в щеточном контакте ΔUщ, уменьшение магнитного потока возбуждения Фо из-за размагничивающего действия поперечной реакции якоря на величину ΔФ, уравнение напряжение тахогенератора будет
 (2)
(2)где: Ia – ток якоря; rам- сопротивление обмотки якоря. Поскольку Iа = U/Rн, а ΔФ можно принять равным kряIа, уравнение (2) принимает вид

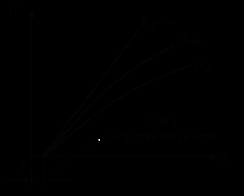
Рис.11. Выходные характеристики тахогенератора постоянного тока
Здесь: Rн - сопротивление нагрузки; kря - коэффициент пропорциональности между током якоря и потоком реакции якоря.
Решая последнее уравнение относительно U, окончательно получим
 (3)
(3)На рис.11 по уравнению (3) построены выходные характеристики тахогенератора постоянного тока. Их анализ позволяет сделать следующие выводы:
1)характеристики начинаются не из нуля - появляется зона нечувствительности, в пределах которой выходное напряжение равно нулю;
2)характеристики нелинейные с различной крутизной: чем меньше сопротивление нагрузки, тем меньше крутизна.
Приложение:
Датчик - это первичный преобразователь, элемент измерительного, сигнального, регулирующего или управляющего устройства системы, преобразующий контролируемую величину (давление, температуру, частоту, скорость, перемещение, напряжение, электрический ток и т.п.) в сигнал, удобный для измерения, передачи, преобразования, хранения и регистрации, а также для воздействия им на управляемые процессы. В соответствии с классификацией, принятой в Государственной системе приборов и средств автоматизации (ГСП), датчики относятся к техническим средствам сбора и первичной обработки контрольно-измерительной информации.
Промышленные датчики являются одними из основных элементов в устройствах дистанционных измерений, телеизмерений и телесигнализации, а также в системах регулирования и управления.
По физическому принципу работы датчики подразделяются на бесконтактные - индуктивные, емкостные, магнитные, оптические (фотоэлектрические), ультразвуковые, и на контактные, основными из которых являются энкодеры – устройства преобразующие угловые повороты или линейные перемещения в последовательность импульсов определенного формата.
По типу выхода датчики подразделяются на дискретные (выключатели), аналоговые и цифровые.
К разряду выключателей с дискретным выходом относятся устройства, которые имеют только два коммутационных состояния – открыт или закрыт.
«Электронщик» является дистрибьютором ведущих российских и зарубежых производителей датчиков.
Аналоговые и цифровые датчики имеют зависимость выходной величины от расстояния до объекта. В качестве выходной величины у аналогового выхода в основном используется ток 4 – 20 мА, а также напряжение 0 – 5 Вольт (напряжение 0 – 10 Вольт и ток 0 – 20 мА считаются устаревшими). У цифровых датчиков сигнал на выходе кодируется в последовательность импульсов определенного формата, например RS 232, RS 422/485, HyperFace, ProfyBus и т.д.
Основную долю продукции обоих производителей составляют выключатели, поэтому с целью правильного и однозначного толкования рассмотрим их функции выхода, одинаковые для всех типов независимо от физического принципа работы.
У всех бесконтактных выключателей есть исходное состояние, т.е. когда объект отсутствует в зоне чувствительности датчика. Данное состояние определяет функциональный тип выключателя, который может встречаться в следующих вариациях:
- нормально открытый (NO), замыкающий, нормально разомкнутый
- нормально закрытый (NC), размыкающий, нормально замкнутый
- переключающий (NO and NC, Q and Q', complementary, antivalent)
- инвертируемый (NO or NC, Q or Q', reversible, invertable). В отличии от переключающего типа, где физически 2 контакта, в данном случае физически 1 контакт, который может использоваться в режиме или замыкающего или размыкающего
- NANUR, специальный выход для взрывоопасных зон. Физически представляет собой токовый выход с верхним и нижним уровнем сигнала, который обрабатывается специальным блоком иcкрозащиты, который также выполняет функции питания/преобразования. Смысл данного выхода в недопущении образования искры в опасной зоне при обрыве соединительного провода датчика.
Необходимо отметить, что у производителя SICK термины NO и NC относятся к индуктивным, емкостным и магнитным типам датчиков, а Q и Q относятся к оптическим и ультразвуковым датчикам. Причем существуют различные вариации в зависимости от типа фотоэлектрического датчика (барьерный, рефлекторный, диффузный), которые будут рассмотрены далее.
Помимо выключателей с дискретным выходом оба производителя выпускают датчики с аналоговым выходом. В настоящее время наибольшее распространение получил токовый выход 4-20 мА. В отличии от выхода 0-10 В он является в значительной степени более помехоустойчивым и не зависит от падения напряжения (т.е. от длины соединительного кабеля). Однако, токовый выход более сложен в последующей обработке. Поэтому для перевода его в напряжение 2-10 В можно подключить в цепь выхода подстроечный резистор 500 Ом, а выход резистора замкнуть на массу. Напряжение 2-10 В снимается с зажимов резистора. (для получения напряжение 0-10 В необходимо, чтобы токовый выход был 0-20 мА, однако он тоже сейчас устарел).
Цифровым выходом оснащаются высокотехнологичные датчики расстояния, измерители угловых перемещений (энкодеры), лазерные сканеры, системы промышленного зрения и т.п., которые преобразуют соответствующую изменяющуюся физическую величину в последовательность импульсов определенного формата. Цифровой выход полезен для производственных линий высокой степени автоматизации и интеграции. Подобные изделия выпускаются только немецким производителем SICK.
ссылка скрыта
Датчики автоматизированных электроприводов