
Этапы развития кафедры
| Вид материала | Документы |
- Лекция №1, 123.3kb.
- Этапы развития общества, 212.7kb.
- Панишев Е. А., ст преподаватель кафедры философии и культурологии Примерный перечень, 14.75kb.
- Справочник классного руководителя Внеклассное мероприятие "Этапы развития российской, 436.77kb.
- «Введение в логику. Исторические этапы развития логики», 234.11kb.
- Российской Федерации Этапы становления и перспективы развития Вид мероприятия Плановое, 13.74kb.
- Вопросы к зачету по курсу лекций "Информатика" для студентов Iкурса кафедры аэту iсеместр., 18.81kb.
- Отечественная история, всемирный исторический процесс, этапы исторического развития, 120.44kb.
- Программа вступительного экзамена вмагистратуру по специальности «6M070300-информационные, 73.49kb.
- Развитие предпринимательской деятельности: этапы, проблемы и пути их решения, 166.8kb.
 | Серия издания «Кафедры и факультеты МГТУ им. Н.Э. Баумана — национального исследовательского университета техники и технологий» |
Кафедра ИУ-1
«Системы автоматического управления»
МГТУ им. Н.Э. Баумана
2011
Этапы развития кафедры
| 1948 | На базе кафедры «Спецэлектротехника» организована кафедра 24-1 «Автоматика и телемеханика» |
| 1955 | Начало подготовки по специальности «Системы управления летательными аппаратами» |
| 1961 | Кафедра получила новое название «Системы автоматического управления» |
| 1975 | Начало подготовки по специальности «Управление комплексами ЛА» |
| 1987 | Начало подготовки специалистов на отраслевых факультетах РТ, РКТ, АК |
| 1991 | Организован совместно с Чебоксарским ОАО ЗЭиМ учебно-научный центр «Интеллектуальные системы» (Интелсист) |
| 1995 | Организован филиал кафедры на НПО им. С.А. Лавочкина |
| 2000 | Начало подготовки бакалавров и магистров |
| 2009 | Начало подготовки специалистов на факультете ПС |
Кафедра ИУ-1 «Системы автоматического управления»:
краткая характеристика
Кафедра ИУ-1 и три ее филиала на ведущих предприятиях, занимающихся созданием летательных аппаратов, готовят:
• бакалавров и магистров техники и технологии по направлению «Автоматизация и управление». Программы подготовки — интеллектуальные системы управления, теория систем управления, техническая диагностика и надежность систем управления, системы автоматического управления летательными аппаратами;
• инженеров по системам управления по направлению «Автоматизация и управление», специальность — «Управление и информатика в технических системах»;
• инженеров по системам управления по направлению «Системы управления движением и навигация», специальность — «Системы управления летательными аппаратами».
 Заведующий кафедрой — профессор, д.т.н., Заслуженный деятель науки и техники РФ Константин Александрович Пупков | Выпускниками кафедры были выдающиеся специалисты: Бородин Юрий Иванович — Генеральный директор ЦНИИ «Курс»; Ларичев Олег Иванович — академик РАН; Литовченко Цезарий Григорьевич — Главный конструктор, лауреат Ленинской премии; Пантелеев Владимир Павлович — д.т.н., лауреат Ленинской премии; Пупков Константин Александрович — академик РАЕН; Румянцев Геннадий Николаевич — начальник отделения НПО АП им. Н.А. Пилюгина; Федосов Евгений Александрович — академик РАН, директор ГосНИИ АС и многие другие... |
На кафедре существуют специализации:
• программное обеспечение систем управления;
• системы управления космических летательных аппаратов;
• системы управления ракет;
• системы управления производственными процессами.
От простых систем управления одиночными объектами до сложнейших космических и производственных комплексов — таков диапазон разработок выпускников кафедры.
Современные системы управления создаются на основе новейших достижений науки, техники и технологий. Отличительной чертой этих систем является способность воспринимать информацию; об окружающей среде и вырабатывать управляющие воздействия с целью изменения состояния того или иного объекта управления подобно тому, как это делает человек, но значительно быстрее и надежнее. Поэтому специалисты по системам управления должны уметь создавать алгоритмы и программное обеспечение для процессов управления на основе современных информационных технологий, достижений нейрофизиологии и микропроцессорных вычислительных средств. С помощью устройств мехатроники и микромеханики процессы обработки информации и управления реализуются в автоматических системах.
В связи с этим на кафедре разрабатывают методы, алгоритмы и программное обеспечение для формирования баз знаний, получения экспертных оценок и принятия решений в интеллектуальных системах. Развиваются новые информационные технологии, ориентированные на применение параллельных алгоритмов и параллельных языков программирования (ОККАМ-2, параллельного СИ и др.). В качестве технических средств, реализующих эти алгоритмы, используются мультитранспьютерные вычислительные сети, нейрокомпьютеры и оптические процессоры.
Внедрена и широко используется в учебном процессе и исследованиях отечественная SCADA-система Трейс Моуд, позволяющая автоматизированно проектировать системы управления объектами как в производственной сфере, так и на различного рода летательных аппаратах.
В области теории управления получены результаты, позволяющие синтезировать системы управления, способные эффективно работать в условиях неполной и противоречивой информации об окружающей среде, созданы новые эффективные алгоритмы распознавания образов.
Признание получили сформированные на кафедре научные школы по теории автоматического регулирования, статистическим методам, методам идентификации, теории систем с переменными параметрами и аналитических самонастраивающихся систем, спектральным методам, научным основам комплексной автоматизации и АСУ технологическими процессами.
Современный уровень прикладной математики, микроэлектроники, средств вычислительной техники позволяет перейти к созданию принципиально нового поколения систем управления — интеллектуальным системам. Быстро развиваются направления подготовки инженеров и научной деятельности по:
• разработке систем управления летательными аппаратами (ракетами и космическими летательными аппаратами);
• разработке систем автоматизированного управления производственными процессами;
• исследованию и созданию интеллектуальных систем управления в различных сферах деятельности;
• исследованию и разработке динамических экспертных систем;
• исследованию и разработке параллельных алгоритмов управления, их реализации с помощью сетевых вычислительных структур (мультипроцессорных систем, нейрокомпьютеров, сигнальных процессоров);
• информационным технологиям (сенсорные сети, беспроводные и коммутируемые компьютерные сети, интернет-телефония, средства мультимедиа и многое другое).
Учебный план и изучаемые дисциплины
Всего теоретического обучения 9778 академических часов
Из них:
Общие гуманитарные и социально-экономические дисциплины 1802
Иностранный язык, Физическое воспитание, Отечественная история, Культурология, Политология, Философия, Правоведение, Экономика, Валеология, Русский язык и культура речи
Общие математические и естественнонаучные дисциплины 2156
Математический анализ, Обыкновенные дифференциальные уравнения, Аналитическая геометрия, Линейная алгебра, Теория вероятностей и математическая статистика, Высшая математика, Высшая математика – спецглавы, Информатика, Физика, Химия, Экология, Параллельное программирование, Теоретическая механика, Математические основы теории систем
Общепрофессиональные дисциплины 2821
Инженерная графика, Материаловедение, Теоретические основы электротехники, Электроника и микроэлектроника, Основы теории управления, Основы конструирования приборов, Основы автоматизированного проектирования, Телекоммуникации, Технология приборостроения, Учебный практикум на ЭВМ, Учебно-технологический практикум, Безопасность жизнедеятельности, Экономика предприятия, Организация и планирование производства, Основы менеджмента, Метод пространства состояний, Дискретные САУ, Оптимальное управление детерминированными процессами, Оптимальное управление многообъектными, многокритериальными системами, Теория управления - спецглавы
Специальные дисциплины 1863
Введение в специальность, Механика полета, Гироскопические приборы, Технические средства САУ, Научно-исследовательская работа, Спецтехнология, Дисциплины по выбору, Моделирование и испытание САУ, ТААУ — курсовая работа, Спецтехсредства САУ — курсовой проект, Основы МК-управления, Управляющие ЭВМ и комплексы, Радиолокационные и информационно-измерительные комплексы, Основы ИК-техники
Специализация 686
Факультативные дисциплины (военная подготовка) 450
История развития кафедры
| В 1948 г. на базе кафедры МВТУ «Спецэлектротехника» образована новая кафедра «24-1» для подготовки инженеров по специальности «Автоматика и телемеханика», с 1961 г. она стала называться «Системы автоматического управления». Первым заведующим кафедрой «Автоматика и телемеханика» 1 января 1949 г. назначен к.т.н. В.В. Солодовников, который занимал эту должность с небольшим перерывом до 1988 г. В 1955 г. профиль кафедры изменился: началась подготовка инженеров по специальности «Системы управления летательными аппаратами» (САУ ЛА) по специализации «САУ атмосферными ЛА», а с 1975 г. — «Управление комплексами ЛА». |  Первый заведующий кафедрой — профессор, д.т.н., Заслуженный деятель науки и техники РФ Владимир Викторович Солодовников |
В момент своего образования персонал кафедры состоял из одного ассистента-совместителя А.А. Воронова и двух преподавателей-почасовиков В.К. Титова и А.И. Гузенко, к началу весеннего семестра 1948/49 учебного года на кафедре работали уже два штатных преподавателя, четыре совместителя (включая заведующего кафедрой) и шесть человек учебно-вспомогательного персонала, к 1968 г. — 22 штатных преподавателя (три профессора, восемь доцентов, два старших преподавателя и девять ассистентов), а также пять профессоров-совместителей. Штат учебных и научно-исследовательских лабораторий составлял 31 человек (заведующий лабораторией, инженеры, учебные мастера, механики, техники и лаборанты).
Число учебных групп на кафедре в 1964/65 учебном году доходило до девяти. С 1989/90 учебного года на дневном отделении обучаются две группы, на факультетах «Ракетно-космическая техника», «Аэрокосмическая техника», «Приборостроительный» — три группы.
Начало теоретическим исследованиям, связанным с частотными представлениями, в Советском Союзе положено в 1938 г. в ВЭИ работами А.В. Михайлова, посвященными частотному методу анализа устойчивости САР.
В 1939—1941 гг. в ВЭИ В.В. Солодовниковым впервые сформулировано понятие и поставлена проблема качества САР при детерминированных воздействиях, даны исходные положения оригинального частотного метода решения этой проблемы. С середины сороковых годов частотный метод анализа качества в его работах получает дальнейшее развитие: дается математическое обоснование метода, устанавливается взаимосвязь частотного метода анализа качества с частотным методом анализа устойчивости, метод распространяется на широкий класс типовых воздействий и ненулевые начальные условия, системы с распределенными и переменными параметрами. Этими работами положено начало формирования нового раздела теории автоматического регулирования (ТАР) — анализу переходных процессов, вызываемых детерминированными воздействиями.
| Наиболее полное развитие и завершение частотный метод получил уже в рамках научной школы МВТУ в 1948—1952 гг. В этот период установлены свойства и критерии, предложены теоремы, позволяющие судить о качестве и характере переходного процесса непосредственно по частотным характеристикам, разработан метод трапецеидальных частотных характеристик для анализа и построения переходных процессов, разработаны и составлены таблицы h-функций; разработан метод синтеза САР и их корректирующих |  Историческая эмблема кафедры «Системы автоматического управления» |
устройств по заданным требованиям к запасу устойчивости и качеству регулирования. Методы синтеза основывались на специфической особенности САР, заключающейся в наличии неизменяющейся части объекта регулирования. В итоге разработан общий частотный метод анализа и синтеза линейных САР, дающий единую методику решения всех типовых задач ТАР.
За разработку частотного метода анализа динамики САР В.В. Солодовников награжден премией президиума АН СССР. Итоги его работы в этом направлении изложены в монографии «Основы автоматического регулирования», издание которой сыграло большую роль в формировании и дальнейшем развитии теории и практики автоматического регулирования и управления. В 1950–1960-х гг. частотный метод обобщен для дискретных систем управления (ДСУ).
Все эти исследования оказали значительное влияние на формирование частотного подхода к анализу и синтезу ДСУ в классе дискретно-непрерывных моделей.
Большое значение для формирования теории дискретных систем управления имела монография профессора, д-ра техн. наук Л.Т. Кузина, работавшего в то время на кафедре САУ. В этой книге на основе ТАР непрерывных систем дано систематическое изложение методов расчета и проектирования дискретных систем с использованием математического аппарата Z-преобразования.
В работах В.А. Карабанова показано, что знание параметрической передаточной функции позволяет использовать при исследовании процессов в нестационарных линейных системах весь набор приемов, разработанных в рамках частотного метода. Однако задача определения параметрической передаточной функции оказалась весьма сложной. Применение теоремы о свертке в комплексной области позволило упростить ее решение. Было показано, что применение метода свертки во многих практически важных случаях (в частности, для СУ конечным состоянием, включая и системы наведения ЛА) позволяет благодаря переходу в комплексную область облегчить определение и в некоторых случаях получить в замкнутой форме параметрическую передаточную функцию исследуемой системы (1967–1972 гг.). На основании этого разработана методика исследования, расчета и проектирования нестационарных систем одного класса с широким применением приемов частотного метода.
Основная проблема ТАР — синтез алгоритма управления, обеспечивающий экстремум некоторого функционала при наличии ограничений — стала разрабатываться с 1959 г. Показано, что САУ можно рассматривать как двухуровневые иерархические автоматические системы, верхним уровнем которых является уровень оптимизации, вырабатывающий управляющие воздействия, а нижним — уровень САР, отрабатывающий эти воздействия.
Обычно считают, что интегральные уравнения стали использоваться в связи с задачами оптимизации. Но еще в 1939 г. получено интегральное уравнение для линейных САР, сформулирована задача синтеза регулятора как задача решения интегрального уравнения во временной области. Однако ввиду сложности математического аппарата интегральных уравнений этот подход в ТАР не получал развития в течение долгого времени — вплоть до развития основ статистической динамики САУ на базе работ А.Н. Колмогорова и Н. Винера. Формирование и развитие основ статистической динамики САР и САУ как раздела ТАУ велось в этом направлении.
Монография В.В. Солодовникова, переведенная в США, стала в научно-технической литературе первой книгой, специально посвященной анализу, оптимизации и синтезу САУ при наличии помех. Она сыграла большую роль в становлений теории стохастического управления, в практическом применении этой теории для разработки высококачественных следящих систем и САУ, при подготовке специалистов по автоматическому управлению и формировании соответствующих разделов курсов по ТАУ.
Частотный метод синтеза был распространен на системы, работающие в условиях случайных воздействий и помех.
Основная задача этого этапа развития ТАУ заключалась в разработке динамической и статистической точности при случайных воздействиях. В МВТУ разработан общий метод решения задач оптимального управления при детерминированных и случайных воздействиях в классе систем с постоянными и переменными параметрами, применимый для решения ряда задач стохастической оптимизации.
Были развиты методы анализа и синтеза систем со случайным коэффициентом усиления, учитывающие допуски на параметры системы.
В 1968 г. вышла книга Н.Т. Кузовкова, в которой излагались и развивались методы ТАР, получившие к этому времени широкое применение.
В конце 1950-х гг. разрабатывается проблема исследования нелинейных динамических систем при случайных воздействиях. В этот период К.А. Пупковым создается новый метод статистического анализа нелинейных систем, основанный на аппроксимации нелинейных функций статистически эквивалентными им передаточными функциями. Этот метод позволил обобщить существовавшие ранее подходы к такому анализу, распространить на нелинейные системы частотные методы, широко применяемые для проектирования линейных систем, и увеличить точность статистического анализа. Метод вошел в иностранную литературу как квазилинейный метод Пупкова.
Дальнейшее развитие теории нелинейных систем дано в монографии К.А. Пупкова, В.И. Капалина и А.С. Ющенко «Функциональные ряды в теории нелинейных систем» (1976), в которой описаны новые направления исследований нелинейных систем управления на основе широкого применения средств вычислительной техники.
Результатом применения функциональных рядов явилось новое описание динамических свойств человека-оператора, работающего в СУ, а также формирование модульного принципа натурно-математического моделирования сложных динамических систем.
Большое значение получили результаты К.А. Пупкова и его ученика Г.А. Костюка, связанные с разработкой метода оценки качества сложных систем, отрабатываемых в процессе испытаний, которые отражены в монографии «Оценка и планирование эксперимента» (1977).
Методы идентификации, т.е. методы определения оператора (математического описания) объекта или системы по экспериментальным данным, получили в МВТУ существенное развитие. Первой книгой, в которой специально рассматривается эта проблема, стала монография В.В. Солодовникова и А.С. Ускова.
В результате использования той же математической базы, что и для спектрального метода моментов, развитого применительно к задачам анализа А.Н. Дмитриевым, разработан единый подход к идентификации стационарных и нестационарных систем с сосредоточенными и распределенными параметрами при детерминированных и случайных воздействиях.
Определение и принцип действия самонастраивающихся систем (СНС) описаны впервые на сессии АН СССР по научным проблемам автоматизации производства в октябре 1956 г. Это была первая отечественная работа по аналитическим или, как их часто называют, беспоисковым СНС. Предложенная схема послужила началом для развития класса САУ с оптимальной настраиваемой математической моделью.
В начале 1960-х годов на кафедре развернулись исследования, связанные с разработкой аналитических градиентных самонастраивающихся СУ с эталонными моделями; были разработаны инженерные методы расчета и проектирования этого класса систем и исследованы возможности их применения для объектов различных классов с учетом нелинейности и нестационарности. Эти исследования привели к разработке так называемого метода эквивалентов, сущность которого состоит в том, что вблизи точки экстремума контур СНС любого параметра можно представить в виде эквивалентной замкнутой системы с астатизмом первого порядка. Для анализа такого контура можно использовать обычные частотные методы анализа и синтеза САР.
 Объекты управления — ЛА |  Система управления головкой самонаведения ЛА |
Естественным обобщением понятия частотного спектра сигнала и частотной характеристики систем является соответственно понятие ортогонального спектра сигнала (ОСС) и ортогональной спектральной характеристики (OCX) как совокупности коэффициентов разложения сигнала по выбранной системе ортогональных функций.
Спектральный подход начал развиваться с возникновением ТАР. Аппарат спектрального метода представляет собой новую форму математического описания САУ, основанную на дальнейшем развитии и обобщении частотной формы описания.
Разработка основ спектрально-операторного метода связана с созданием принципов построения аналитических самонастраивающихся систем, как СУ с переменными параметрами на конечных в общем случае переменных интервалах времени.
Спектрально-операторная теория развивалась вначале как теория линейных нестационарных непрерывных одномерных систем с детерминированными параметрами, находящимися под воздействием детерминированных и случайных функций времени. Параллельно шло обобщение спектрального метода, формировались принципы построения его математического обеспечения. Разработка основ спектрального метода была в основном завершена В.В. Солодовниковым и В.В. Семеновым.
Сложность при синтезе и проектировании САР учитывалась уже при разработке частотного метода синтеза корректирующих устройств. Первая попытка математически сформулировать принцип сложности предпринята В.В. Солодовниковым и В.Л. Ленским в 1965 г. Принятый ими подход основан на введенном понятии сложности как широты класса или множества, в котором ищут решение задачи.
В.Ф. Бирюковым проведен анализ свойств операторов, порождаемых скалярными и векторными интегральными уравнениями первого рода (например, типа уравнения Винера-Хопфа), а также корректности задач их решения в естественных с практической точки зрения функциональных пространствах; проанализированы методы решения некорректно поставленных задач и показано, что их возможности ограничены. На основе принципа минимальной сложности (ПМС) даны корректные алгоритмы для вычисления скалярных и матричных ИПФ соответственно для одномерных и многомерных САУ, реализуемые на ЭВМ. Показано, что использование ПМС целесообразно и для решения задач оптимального детерминированного управления в связи с применением принципа максимума и рассмотрением условий реализуемости оптимальных. управлений (В.В. Солодовников, В.И. Тумаркин. Теория сложности и проектирование систем управления, 1990).
Задача построения оптимального управления для нелинейных систем методом замещения решена в докторской диссертации В.П. Колесника.
Итоги научных исследований не только школы МВТУ, но и всей советской школы в области ТАР подведены в монографии «Техническая кибернетика. Теория автоматического регулирования». Коллектив авторов монографии в 1972 г. удостоен Государственной премии. В создании этих трудов, получивших широкое признание, ведущую роль сыграли ученые МВТУ, в их числе В.В. Солодовников (руководитель работ), Е.П. Попов, К.А. Пупков, В.В. Семенов и др.
С конца 1980-х гг. на кафедре развивается научное направление, связанное с созданием теории и техники интеллектуальных систем. Основы этого направления заложены в упомянутой монографии В.В. Солодовникова, В.И. Тумаркина, монографии В.Н. Плотникова, В.А. Суханова, Ю.Н. Жигулевцева «Речевой диалог в системах управления» (1980), монографии В.Н. Плотникова и В.Ю. Зверева «Оптимизация оперативно-организационного управления» (1980).
Создание микропроцессоров высокой производительности с большим объемом памяти при малых габаритах и энергоемкости привело к возможности реализации новых информационных технологий в управлении.
Интеллектуальная система определяется как объединенная информационным процессом совокупность технических средств и программного обеспечения, работающая автономно или во взаимодействии с человеком (коллективом людей), способная на основе сведений и знаний при наличии мотивации синтезировать цель, выработать решение о действии и найти рациональные способы достижения цели.
Под руководством заведующего кафедрой К.А. Пупкова разрабатывается научная программа «Интеллектуальные системы»: В.Г. Коньковым — теория робастных систем управления, И.А. Мочаловым и Н.П. Деменковым — теория нечеткого управления, которые позволяют синтезировать алгоритмы управления при неопределенности сведений об окружающей среде и собственном состоянии системы, А.И. Гавриловым — алгоритмы обработки информации и управления в системах, ориентированных на применение нейронных сетей. Г.А. Шахназаровым построены алгоритмы управления на основе принципов адаптации с прогнозом результатов действия мехатронных систем.
Основы теории и техники интеллектуальных систем изложены, в частности, в монографиях К.А. Пупкова и А.П. Карпенко «Моделирование динамических систем на транспьютерных сетях» (1995), К.А. Пупкова и К.А. Неусыпина «Вопросы теории и реализации систем управления и навигации» (1997). Философским проблемам теории интеллектуальных систем посвящена монография К.А. Пупкова и В.Г. Конькова «Мировоззрение управленца» (1997), а в 2003 г. вышла в свет монография этих авторов «Интеллектуальные системы».
Внедрение информационных технологий, включающих параллельные алгоритмы и формирование базы знаний при их реализации на вычислительных сетях в практику управления, открывает перспективу применения всех полученных ранее фундаментальных результатов в области теории управления.
Образовательные программы.
Характеристика научных работ кафедры
Основным направлением подготовки специалистов является разработка и проектирование систем автоматического управления летательными аппаратами различных классов.
Кафедра также готовит специалистов по системам управления производственными процессами.
Начиная с 2000 г. кафедра ведет подготовку бакалавров и магистров по направлению «Автоматизация и управление».
В качестве программ подготовки определены «Системы автоматического управления летательными аппаратами» и «Техническая диагностика и надежность систем управления».
Кафедра готовит специалистов высшей квалификации по научной специальности «Системный анализ, управление и обработка информации» через аспирантуру и докторантуру университета. Доктора и кандидаты наук, сотрудники кафедры ведут работу в промышленности, научно- исследовательских институтах и вузах России и других стран.
Управление летательными аппаратами
Фундаментальные научные исследования в области ТАУ с развитием прикладных научных исследований приобретают широкий размах с начала шестидесятых годов XX в.
Первые исследования в области управления беспилотными ЛА связаны с внедрением в практику расчета и проектирования систем стабилизации ЛА частотных методов. Одной из первых работ, в которой развит частотный метод синтеза корректирующих устройств автомата стабилизации, стала работа В.А. Карабанова. Им же выполнен качественный анализ особенностей динамики систем стабилизации и наведения, основанный на аналитическом исследовании упрощенных математических моделей этих систем. Результаты этих исследований вошли в учебное пособие В.А. Карабанова и А.А. Лебедева «Динамика систем управления беспилотными ЛА».
Учебное пособие Н.Т. Кузовкова «Системы стабилизации ЛА» содержит ряд оригинальных способов анализа и синтеза систем стабилизации, основанных на применении частотных методов.
В работах, выполненных на кафедре Е.М. Вороновым, развита теория дифференциальных игр, получены прикладные результаты оценки предельной эффективности конкретных САУ ЛА и предложены методы оптимального формирования систем наведения беспилотных ЛА.
В 1977 г. группе молодых специалистов кафедры (И.Г. Грибкову, Н.П. Деменкову, В.Е. Зотову и А.В. Крутову) присуждена премия Ленинского Комсомола за цикл работ в области теории управления КЛА.
На основе информационных технологий, использующих распараллеливание алгоритмов обработки информации и управления, разработано программное обеспечение, реализованное на мультитранспьютерной сети, позволившее провести моделирование процесса сборки космических кораблей «Мир» и «Шаттл» в реальном времени. Эти результаты опубликованы в монографии К.А. Пупкова и А.П. Карпенко. Мультитранспьютерная сеть нашла свое применение и в системах обработки большого объема потоковой информации о событиях на поверхности Земли в рамках совместной НИР с Всесоюзным институтом оптико-физических исследований.
 Стенд для полунатурного моделирования ЛА |  Стенд для полунатурного моделирования ЛА |
В начале 90-х годов сотрудники кафедры А.М. Курашин, А.В. Пролетарский, А.В. Фомичев, С.Н. Кабанов участвовали в подготовке технического задания на фантастический на то время проект – полет космического аппарата в корону Солнца, проводили исследовательские работы по созданию космического аппарата для изучения малых небесных тел (работы велись совместно с НПО им. С.А. Лавочкина).
Кафедра постоянно взаимодействует с научно-исследовательскими и опытно-конструкторскими организациями ЦНПО «Комета», ЦКБ «Алмаз», ГосНИИАС, РКК «Энергия», научно-исследовательскими институтами Министерства обороны РФ и т.д.
Имеются договора о научно-техническом сотрудничестве с Институтом проблем управления РАН, НПО АП им. Н.А. Пилюгина, МОКБ «Марс», НПО им. С.А. Лавочкина.
На кафедре получены результаты, связанные с комплексированием робастных, нейро-нечетких и адаптивных методов при решении задач управления сложными объектами. Эти результаты опубликованы в книге К.А. Пупкова, А.И. Гаврилова, И.А. Мочалова и др. «Методы робастного, нейро-нечеткого и адаптивного управления» (2001).
В течение 10 лет на кафедре ведутся научно-исследовательские работы, выполняемые по заказу Министерства обороны России по разработке структуры, программно-алгоритмического обеспечения систем управления перспективных летательных аппаратов (А.В. Пролетарский, А.В. Фомичев).
Автоматизация управления и информационные технологии
Развитие теории и практики построения АСУ потребовало рассмотрения проблемы «человек-машина». Разработка этого направления началась в МВТУ еще в 1950-е гг. Л.Н. Преснухиным, когда оператор в следящих системах имитировался той или иной передаточной функцией. Дальнейшие исследования потребовали нового подхода, основанного на динамическом проектировании контуров автоматизированного слежения с учетом как чисто динамических свойств оператора, так и информационного содержания сигналов, циркулирующих в контуре системы. Такой информационно-динамический подход позволил объяснить изменчивость параметров модели оператора в различных режимах работы и получить решение задачи динамического проектирования автоматизированных больших систем. Описание динамических свойств человека-оператора как нелинейной системы получено К.А. Пупковым (Труды Симпозиума ИФАК-ИФОРС, Варна, Болгария, 1974).
Новые разработки не могли опираться на старую экспериментальную базу. Накопленный опыт дал возможность предложить в качестве основного инструмента исследования тренажерные комплексы, работа над которыми началась в 1970-х гг.
В связи с переоснащением центра подготовки космонавтов им. Ю.А. Гагарина (ЦПК) разработано и внедрено алгоритмическое и программное обеспечение для цифровых тренажерных комплексов нового поколения (работа отмечена первой премией Минвуза СССР); многостепенные имитаторы внешней космической обстановки, предназначенные для навигационной подготовки космонавтов (доцент А.В. Яковлев). Имитатор с четырехосным подвесом и управлением от центральной ЭВМ позволил воспроизводить любой вектор угловой скорости КЛА.
Значительную работу по созданию алгоритмического и программного обеспечения шестистепенного электро-гидравлического стенда для обучения пилотажного экипажа «Буран» в НПО «Молния» выполнил доцент Е.С. Лобусов.
| Почти 20 лет назад для предприятий МАП под руководством А.В. Яковлева разработан и внедрен ряд уникальных цифровых электрооптикомеханических имитаторов для стендов полунатурного моделирования, на которых отрабатывались бортовые САУ высокоманевренных ЛА. К этому направлению примыкают исследования, ведущиеся по проблеме распознавания образов и использованию результатов для целей управления (В.Н. Плотников, В.А. Суханов, Ю.Н. Жигулевцев). Получены теоретические результаты и проведены экспериментальные исследования при решении задач формирования пространства информационных признаков распознавания и разработки решающих правил в многоуровневых системах распознавания. |  Робот-манипулятор с 6 степенями свободы — один из объектов управления |
В прикладном плане основным стало направление, связанное с разработкой систем речевого диалогового управления, где комплексно использовались результаты, полученные при исследовании задач анализа и синтеза речевых образов, построения моделей предметной области и сценариев организации речевого диалога в целом. Результаты работы отражены в монографии «Речевой диалог в системах управления».
В начале 1990-х гг. создается моделирующий комплекс с использованием в качестве имитатора пространственного движения робота типа РМ-01.
При помощи этого комплекса проведено натурное математическое моделирование процесса сближения и сборки космических кораблей «Мир» и «Шаттл». Дальнейшее использование моделирующего комплекса позволило исследовать процессы распознавания видимых изображений и процессы наведения по такому изображению. Оцифрованное изображение в реальном времени обрабатывается вычислительной сетью, состоящей из сигнальных процессоров и транспьютеров. Работа выполнена аспирантами И.С. Каютиным, А.В. Бобковым и другими под руководством К.А. Пупкова.
В 2006 году на кафедре создан первый в Москве и центральном регионе учебно-сертификационный Центр развития сетевых технологий (руководитель А.В. Пролетарский) совместно с ведущим производителем сетевого и мультимедийного оборудования компанией D-Link (МГТУ — D-Link). Обучение в Центре прошли более 600 человек по самым современным информационным технологиям: организация беспроводных сетей, коммутируемые сети, межсетевые экраны, интернет-телефония. Изданы пособия и монографии: «Организация беспроводных сетей» (2006г., 182с.), «Беспроводные сети Wi-Fi» (2007г., 216с.), «IP-телефония в компьютерных сетях» (2008г., 185с.), учебное пособие (гриф УМО) «Беспроводные локальные компьютерные сети» (2008г., 240с).
Автоматизация технологических процессов
Работы по автоматизации технологических процессов ведутся на кафедре с 1950-х гг. В 1954 г. Н.С. Львов начал работы по автоматизации сварочных процессов. В этой области получен ряд результатов: разработаны устройства автоматизации учета и контроля горения сварочной дуги; самонастраивающихся систем регулирования режима; оптимальной конструкции следящих приводов к серийным сварочным аппаратам. Эти результаты внедрены на Московском трубном, Северодвинском и других заводах.
 Стенд с промышленными контроллерами | Теоретические результаты, методы анализа и синтеза САУ получили свое практическое применение при создании конкретных автоматизированных СУ технологическими и организационными процессами в металлургической, машиностроительной, химической промышленности. Содержание работ охватывает этапы постановки задач на функциональном уровне; математическую формулировку задач управления, разработку математических моделей; способов решения задач оптимального управления, удобных для использования ЦВМ; алгоритмического и программного обеспечения; оценку числовых значений параметров. |
Анализ исследований в области управления организационными процессами дан в монографии В.Н. Плотникова и В.Ю. Зверева «Оптимизация оперативно-организационного управления». А.И. Гаврилов провел работы по определению параметров, диагностике и управлению процессом сварки на базе использования нейронных сетей. Н.П. Деменков развил научное направление, связанное с использованием современных микроконтроллеров для управления сложными производственными процессами. Им разработаны научно-методические основы создания адаптивных систем управления производственными процессами.
С 1991 г. Н.П. Деменков руководит учебно-научным центром «Интеллектуальные системы» (Интелсист), созданным совместно с Чебоксарским ОАО ЗЭиМ. Центр является полигоном для отработки современных методов проектирования СУ производственными системами с помощью информационных технологий (в частности, Интернет- и GSM-технологий).
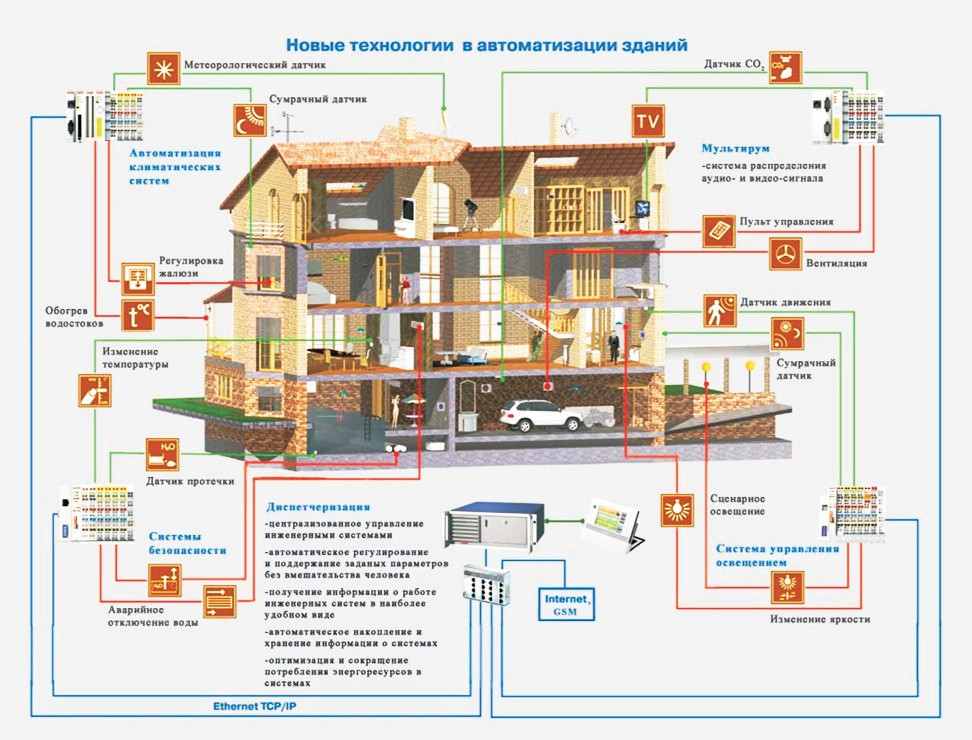
Схема построения систем функционирования интеллектуального здания
Центр оснащен лучшими отечественными контроллерами Ремиконт Р-130 и КРОСС ОАО ЗЭиМ, Овен ООО «Овен» и Контар ОАО МЗТА, а также лучшими зарубежными контроллерами Modicon (США) и Telemecanique (Франция) компании Schneider Electric (Франция). Проектирование АСУ ТП верхнего уровня осуществляется с помощью отечественной SCADA-системы Трейс Моуд компании AdAstra и зарубежных (Monitor Pro и Vijeo Look от Schneider Electric). С 1994 г. Интелсист является авторизованным учебным центром компании AdAstra, а с 1997 г. — центром компетенции компании Schneider Electric. Свыше 200 специалистов из 150 предприятий прошли переподготовку в учебном центре «Интеллектуальные системы».
Студенты кафедры выполняют в центре на современном оборудовании лабораторные работы, курсовое и дипломное проектирование.
10 студентов кафедры приняли участие в конкурсах, проводимых компанией Schneider Electric. Более половины из них получили призовые места, стипендии, а после окончания МГТУ — интересную работу по специальности.
Центр ведет научно-исследовательские работы в области автоматической настройки ПИД регуляторов, нечеткого управления, создания оптимальных и интеллектуальных систем управления для решения экологических задач, разработки программного обеспечения.
Технические средства автоматики
Проектирование СУ ЛА различных классов невозможно без отработки алгоритмов управления ЛА на различных стендах для полунатурного моделирования ЛА и их испытаний.
При управлении угловым движением различных КЛА находят широкое применение маховичные системы. Новые принципы разработки маховичных систем связаны с заменой 2- и 3-степенного карданова подвеса на магнитные или упруго-вязкие подвесы с большими рабочими углами.
На кафедре по заказам НПО им. С.А. Лавочкина и ИПМ РАН ведутся НИР и ОКР по разработке маховичной системы с магнитным подвесом (МП) с наклоняющимся вектором кинетического момента в пределах ± 20°.
Трудность создания таких систем связана со сложностью разработки активных систем управления магнитными шарнирами из-за неустойчивости объекта управления, наличия существенных нелинейностей и большой жесткости, когда постоянные времени механической и электромагнитной систем различаются на 2–3 порядка. Для обеспечения устойчивости системы приходится искать нестандартные решения, включая использование положительных обратных связей во внутренних контурах, позволяющих получить. переходные процессы с перерегулированием, не превышающим 1,5–2,5 мкм.
Маховичная система с МП разрабатывается для ЮТА, предназначенного для полета к Солнцу с гравитационным маневром около Юпитера (проект «Циолковский»).
На базе такой системы создан прецизионный прибор для исследования реологических свойств полимеров. Измерительной части прибора обеспечивается шесть степеней свободы без механического контакта с окружающими деталями, что позволяет с высокой точностью измерять вектор состояния сенсора.
Кафедра имеет устойчивые научные связи с ИПУ им. В.А. Трапезникова РАН. Разработки кафедры в области теории робастного управления выполнены совместно с такими известными учеными, как И.В. Прангишвили, А.П. Курдюков и др.
Совместно с Университетом Де Монтфорт (Великобритания) выполнен проект по параллельным вычислениям и транспьютерным технологиям. На основании договора о содружестве с этим университетом ведется подготовка специалистов из России, которые получают ученую степень доктора философии.
Выполняются совместные исследования с Варшавским техническим университетом по проблемам микромеханики.
Сотрудники кафедры постоянно участвуют в работе Международных форумов по мехатронике (Университет технологии, США), распознаванию образов (Австралия), проблемам моделирования (Вьетнам), проблемам робастного и адаптивного управления (Испания) и др. Кафедра — основатель и организатор Международного симпозиума «Интеллектуальные системы», проходившего в Москве, Санкт-Петербурге, Махачкале, Пскове, Калуге и Саратове.
Кафедра развивает перспективные направления, связанные с исследованием и разработкой интеллектуальных систем. Важнейшей задачей их является комплексирование различных методов обработки информации и управления в базе знаний интеллектуальных систем, обеспечивающее автоматический выбор метода в зависимости от состояния окружающей среды и объекта управления. Соответственно специальности, по которым проводится подготовка кадров, связаны с созданием СУ нового поколения — интеллектуальных.
Кафедра выпустила в свет шеститомный учебник под общей редакцией К.А. Пупкова, в создании которого наряду с преподавателями вузов принимали участие ученые ИПУ и ИСА РАН.
В результате обучения на кафедре ИУ-1 выпускник получает фундаментальные знания в области проектирования и использования программной и аппаратной составляющих систем управления. Тенденции развития интеллектуальных систем управления таковы, что в ближайшее время следует ожидать их проникновения во все сферы человеческой деятельности.