
Автоматизация
| Вид материала | Документы |
СодержаниеЕ, потерянная частицей в блоке детекторов, где С i-тое — абсолютная градуировочная константа i-го детектора; Hi Контрольные вопросы к главе 1 Основы системы камак |
- В. И. Харитонов > К. И. Меша Одобрено методической > С. С. Драгунов комиссией факультета, 321.05kb.
- Темы курсовых проектов Автоматизация учета налогоплательщиков (НП) физических и юридических, 19.54kb.
- Автоматизация бухгалтерского учета нужна ли она?, 216.55kb.
- Программа вступительного экзамена по приему в магистратуру по специальности 6М070200, 225.94kb.
- Автоматизация работы программ расчета, 29.26kb.
- Автоматизация и моделирование работы предприятий по строительству промышленных объектов, 445.96kb.
- Автоматизация процессов мониторинга объектов железнодорожной инфраструктуры на основе, 315.84kb.
- К рабочей программе учебной дисциплины «Интегрированные системы проектирования и управления»», 31.58kb.
- Автоматизация процесса формирования индивидуальных учебных планов в системе переподготовки, 256.55kb.
- Темы курсовых работ По дисциплине «Бухгалтерские информационные системы» Автоматизация, 14.74kb.
Как уже отмечалось выше, включение в измерительную установку ЭВМ позволяет решить целый ряд задач, образующих понятие автоматизации эксперимента:
- сбор и накопление больших объемов экспериментальных данных;
- первичную обработку поступающей информации в реальном времени с целью, например, выделения нужных событий;
- оперативный вывод контрольной информации о ходе эксперимента; .
- управление ходом и условиями эксперимента (по командам оператора или по заданному заранее алгоритму);
- стабилизацию параметров экспериментальной установки;
- автоматическое управление установкой (смена образцов, перемещение измерительного элемента) и т. д.
В редких случаях в конкретном эксперименте решается только одна из перечисленных задач; обычно автоматизация носит комплексный характер, при этом решаемые задачи, так же как и сочетания используемых технических средств, весьма разнообразны.
Рассмотрим несколько примеров конкретных экспериментов и экспериментальных установок, чтобы проиллюстрировать разнообразие методов автоматизации физического эксперимента.
Широкое применение идеи автоматизации нашли в физических исследованиях на ускорителях заряженных частиц, где большие объемы регистрируемых данных, сложные критерии отбора полезных событий, необходимость контроля и стабилизации параметров используемой аппаратуры требуют работы экспериментальной установки на линии с ЭВМ и обработки поступающей информации в реальном времени. Рассмотрим организацию приема данных в серии экспериментов по изучению рассеяния нейтронов на легких ядрах 3.
Р
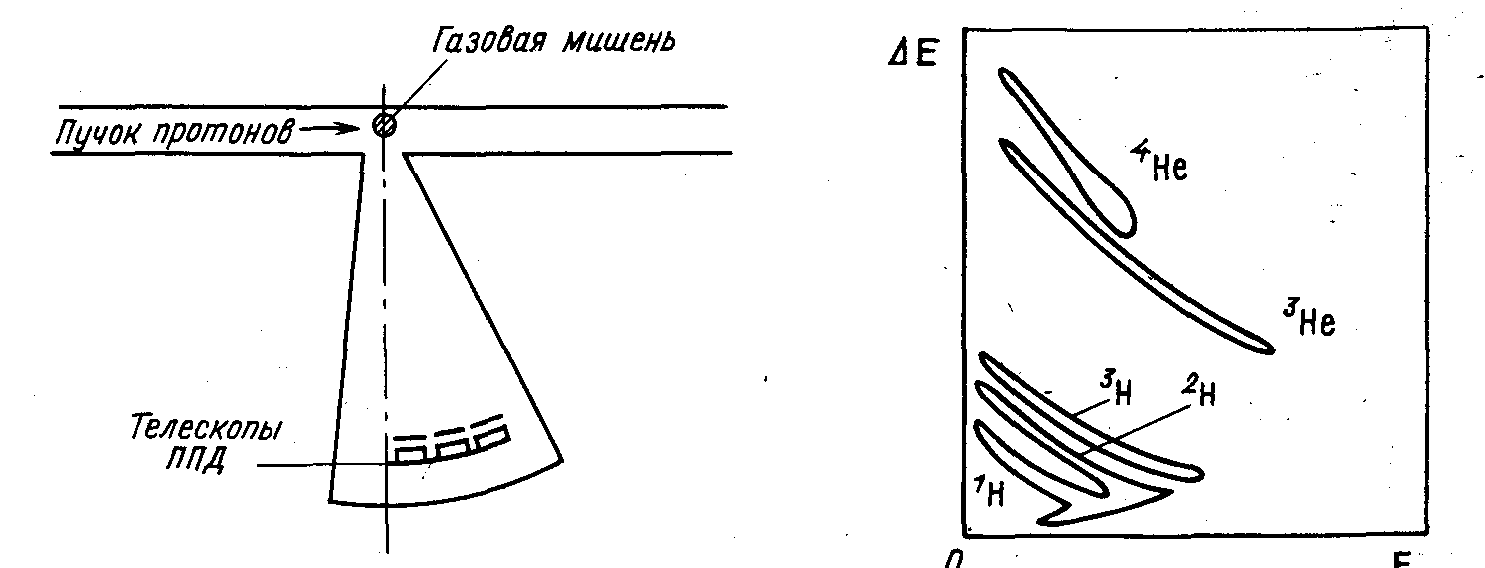
ис. 1.9. Схематическое изображение ус- Рис. 1.10. Разделение ядер по массам с
тановки для изучения рассеяния протонов помощью E—E -методики
Пучок ускоренных протонов (рис. 1.9) падает на газовую струйную мишень, впрыскиваемую в определенные моменты времени в вакуумную камеру ускорителя. Ядра отдачи, которые при малых значениях передаваемых импульсов отлетают практически перпендикулярно направлению пучка, регистрируются телескопами ППД, каждый из которых состоит из двух детекторов, расположенных на некотором расстоянии друг от друга. Первый детектор незначительной толщины (17—20 мкм) используется как Е-детектор, измеряющий удельные потери энергии. Второй детектор, приблизительно в 10 раз более толстый, служит детектором полного поглощения. Одновременная регистрация для каждой частицы значений Д£ и Е позволяет разделить регистрируемые частицы по массам, так как для ядер с определенной массой М и зарядом Z произведение &.Е-Е представляет собой постоянную величину: A£.£~MZ2.
На рис. 1.10 показаны области попадания экспериментальных точек в координатах ДЕ — Е (в реальной установке распределение Л£ — Е наблюдается на экране графического дисплея). Видно, что ядра 4Не, 3Не, 3Н, Н, 'Н идентифицируются с большой достоверностью.
Для сбора информации и управления установкой использовали ЭВМ PDP-11/20, оснащенную накопителями на магнитных дисках и лентах для записи экспериментальной информации, графическим дисплеем, телетайпом в качестве консольного терминала и печатающим устройством (рис. 1.11). Электронная аппаратура установки размещается7 в двух крейтах КАМАК, организованных в параллельную ветвь.
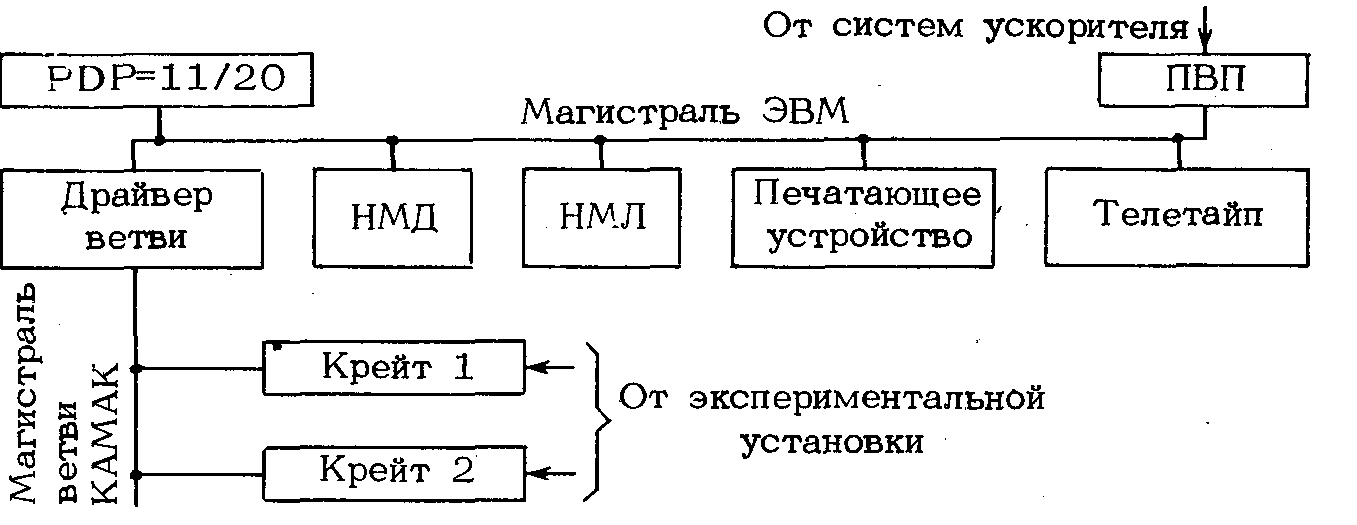
Рис.1.11. Схема сбора данных и управления установкой
Магистраль ветви подсоединяется к магистрали ЭВМ через драйвер ветви, а крейты связаны с магистралью ветви через стандартные контроллеры типа А. Для синхронизации приема данных с работой ускорителя предусмотрен специальный пульт внешних прерываний ПВП.
Рассмотрим взаимодействие элементов установки в процессе измерений (рис. 1.12).
Перед каждым циклом ускорения от управляющей системы ускорителя приходит сигнал Начало цикла ускорения (НЦУ), который с помощью сигнала Прерывание А оповещает установку о начале очередного цикла измерений и приводит в исходное состояние счетчики и регистры установки.
Синхронизация измерений осуществляется с помощью сигналов нарастающего магнитного поля ускорителя (В-таймер). Эти сигналы поступают на вход счетчика Сч (рис. 1.13), показания которого, таким образом, в любой момент времени характеризуют энергию протонов пучка, а также на входы четырех счетчиков с предустановкой Сч.], Сч.2, Сч.З, Сч.4, число которых соответствует количеству импульсов инжекции газа мишени в ускорительную камеру. Момент появления импульса на выходе каждого счетчика определяется значением установленного в нем заранее кода и частотой импульсов, поступающих по линии В-таймер.
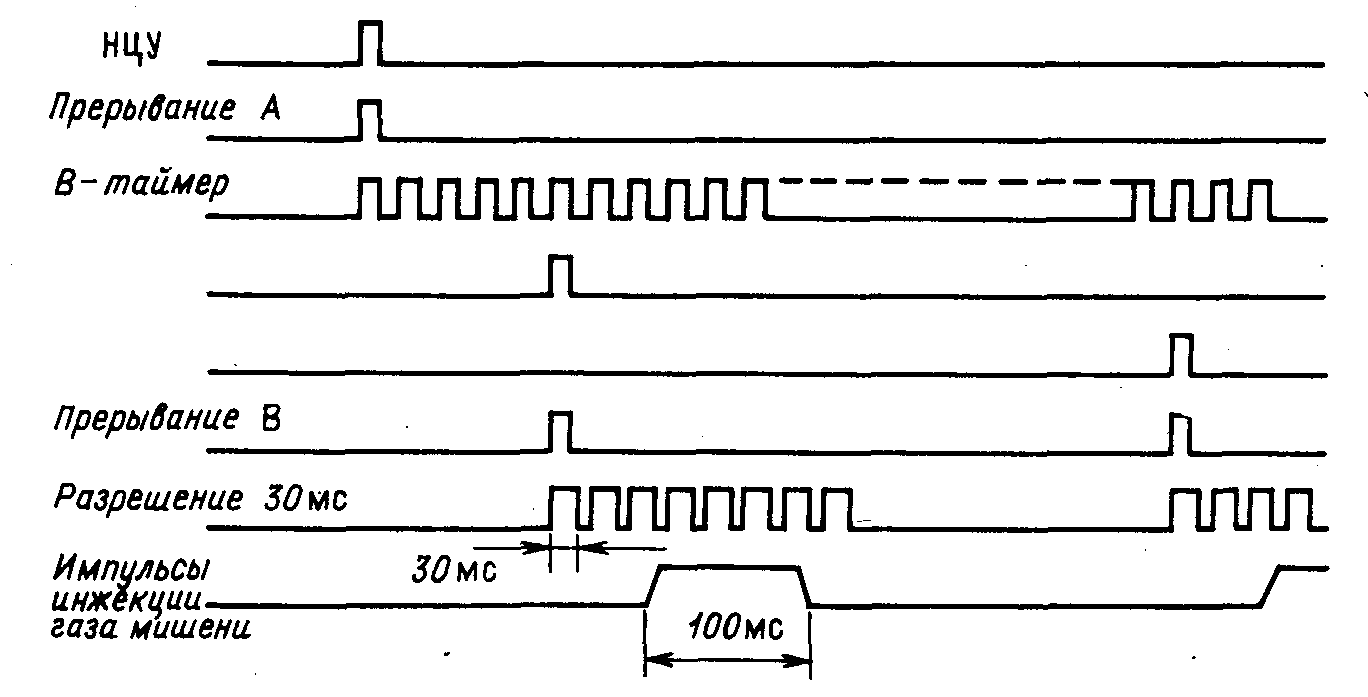
Рис 1.12 Временная диаграмма измерений
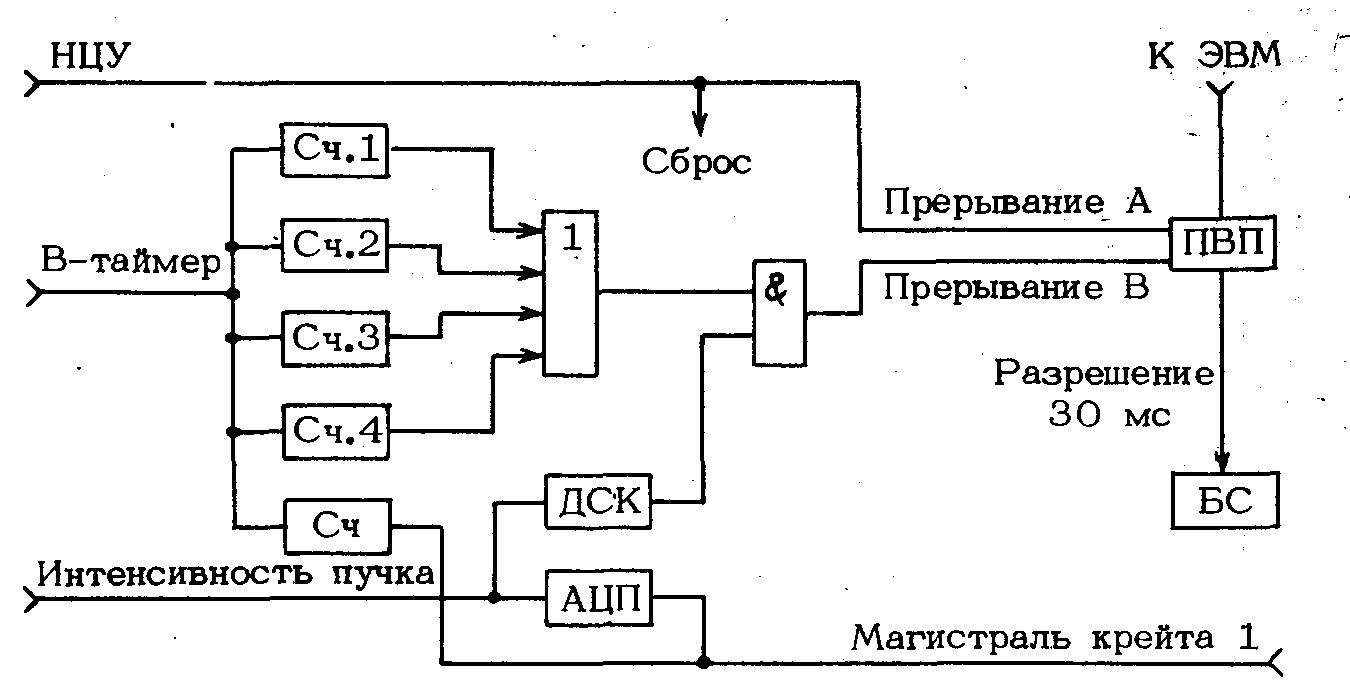
Рис 1.13 Схема выработки условия разрешения на приём данных
В каждом цикле ускорения все счетчики срабатывают по одному разу. Импульсы с выходов счетчиков образуют сигналы Прерывание В, инициализирующие систему приема данных, при этом предусмотрена блокировка сигнала Прерывание В, если интенсивность пучка ниже установленного уровня, для чего служат дискриминатор ДСК и схема И (см. рис. 1.13).
Каждый сигнал Прерывание В дает начало пачке из 8 импульсов Разрешение длительностью 30 мс каждый, следующих с интервалами в 10 мс. Эти импульсы определяют интервалы времени, в течение которых разрешается прием информации от ППД.
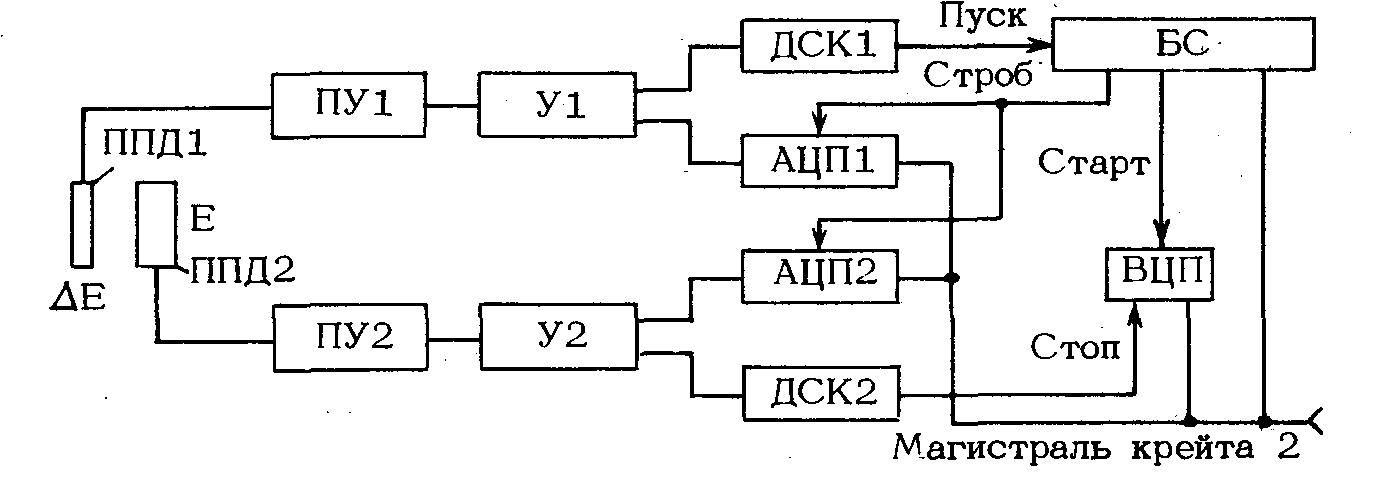
Рис. 1.14. Упрощенная схема спектрометрического канала
Рассмотрим работу одного из спектрометрических каналов установки (рис. 1.14). Импульсы с выходов полупроводниковых детекторов ППД1 и ППД2 проходят через предусилители ПУ1 и ПУ2 и поступают на входы спектрометрических усилителей У1 и У2. Каждый усилитель имеет два выхода — спектрометрический и временной. Спектрометрические сигналы поступают на амплитудно-цифровые преобразователи АЦП1 и А ЦП2, где образуются коды энергий А£ и Е. Временной сигнал от первого детектора через дискриминатор ДСК1 поступает на один из входов Пуск специального блока сканирования БС, который синхронизует работу измерительной системы. Получив сигнал Пуск, БС вырабатывает стартовый импульс для время-цифрового преобразователя ВЦП и стробирующий импульс для управления АЦП. По окончании преобразования в АЦП, на что требуется до 13 икс, БС определяет номер линии, по которой пришел сигнал Пуск, после чего ЭВМ считывает данные из обоих АЦП и ВЦП сработавшего канала и записывает эту информацию вместе с номером канала в один из двух модулей памяти в виде 24-разрядного слова. Далее БС проверяет, нет ли других сработавших каналов (что может быть при одновременном срабатывании нескольких телескопов) и, если такие каналы не обнаружены, переходит на ожидание следующего сигнала Пуск. При наличии нескольких сработавших каналов БС считывает из них информацию и переносит ее в модуль памяти.
Блок сканирования фиксирует срабатывания каналов, лишь пока на его входе действует сигнал Разрешение (см. рис. 1.12).
По концу этого сигнала ЭВМ считывает информацию из модуля памяти и счетчика сигналов, поступающих по линии В-таймер и из АЦП, измеряющего интенсивность пучка (см. рис. 1.13).
Каждый модуль памяти имеет емкость 64 24-разрядных слова. Если в течение цикла Разрешение (30 мс) произошло не более 64 срабатываний детекторов, все происходит так, как это описано выше. ."Если модуль памяти заполнился раньше, он посылает в ЭВМ сигнал прерывания и ЭВМ приступает к считыванию накопленной информации. Новая информация от детекторов тем временем поступает во второй модуль памяти. Использование двух модулей памяти для предварительного запоминания является реализацией известной идеи буферизации, позволяющей в данном случае существенно уменьшить мертвое время и сократить просчеты измерительной системы.
Рассмотренный пример показывает, что даже относительно простой в идеологическом плане эксперимент может потребовать большого количества разнообразной электронной аппаратуры и сложного алгоритма приема информации. В установку входят как аналоговые (предусилители, усилители, линейные задержки), так и цифровые (АЦП, ВЦП, память) модули КАМАК, при этом наряду со стандартной аппаратурой используются специально разработанные блоки (БС, ПВП). Большое количество модулей потребовало использования двух крейтов КАМАК, что, в свою очередь, привело к необходимости организации параллельной ветви КАМАК. Наличие графического дисплея позволяет в наглядной форме контролировать ход эксперимента и помогает при обработке его результатов. При использовании в экспериментальной установке большого количества детекторов, что характерно для исследований в физике высоких энергий, возникает проблема борьбы с дрейфом параметров детекторов. Эта проблема может быть решена путем непрерывного сравнивания значений дрейфующих параметров с некоторым эталоном, выработки сигналов рассогласования и принудительной стабилизации параметров детекторов с помощью этих сигналов. Если, однако, дрейф невелик, можно ограничиться периодическим измерением характеристик детекторов, определением поправочных коэффициентов и компенсацией дрейфа программным путем на этапе обработки результатов измерений. Такая методика была использована на стэндфордском линейном ускорителе в установке для исследования образования электронов, фотонов и пи°-мезонов в электрон-позитронных соударениях при высоких энергиях *. Установка содержит, в частности, 318 черенковских детекторов из свинцового стекла, выходные сигналы которых поступают в амплитудно-цифровые преобразователи большой цифровой системы, где происходит измерение их амплитуд.
П

олная энергия Е, потерянная частицей в блоке детекторов,
где С i-тое — абсолютная градуировочная константа i-го детектора; Hi — амплитуда импульса от i-го детектора (после вычитания пьедестала АЦП); Gi(t) — коэффициент усиления i-го детектора в произвольный момент времени t, нормированный при начальной градуировке (t=0) на единицу.
Градуировочные константы С/ определяли с помощью высокостабильного светового источника, которым служил небольшой кристалл NaI (T1) с введенным в него а-излучающим препаратом Am. Точную градуировку проводили на пучке частиц хорошо известной энергии. Задача состояла в периодическом определении поправочных коэффициентов Gi(t), которые при большой длительности эксперимента (9 месяцев) могли значительно отклониться от единицы. Пренебрежение этим фактом привело бы к ухудшению энергетического разрешения всей установки. Для периодического определения поправочных коэффициентов в состав экспериментальной установки была введена специальная система контроля (рис. 1.15).
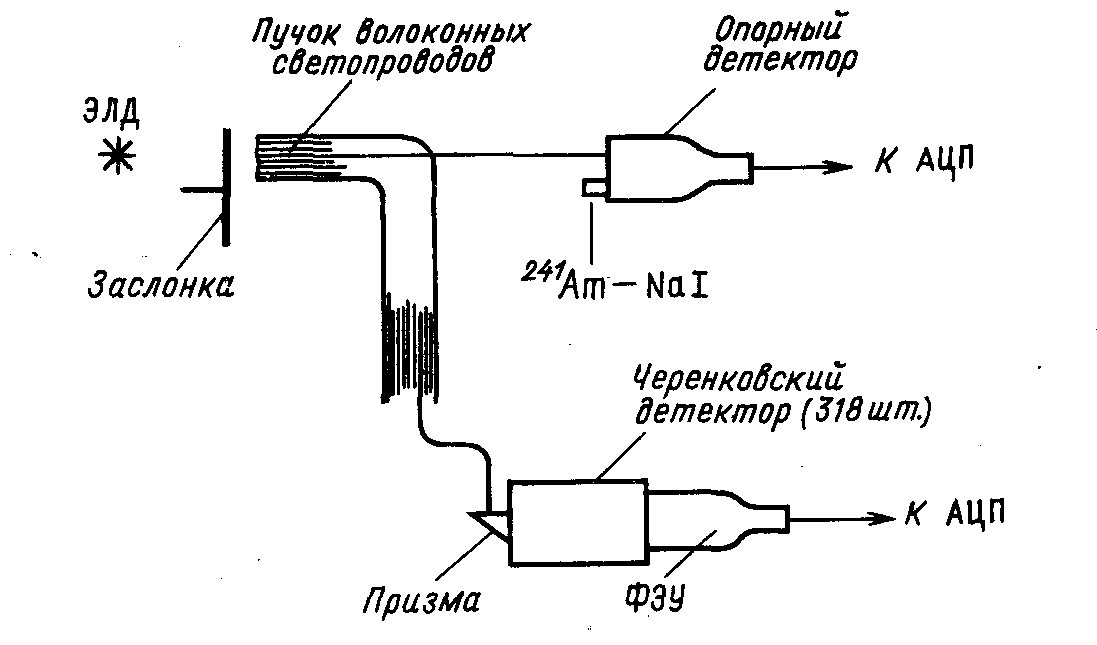
Рис. 1.15. Структура системы контроля ФЭУ
Вспышка света от электролюминесцентного диода (ЭЛД) падает на тщательно отполированный торец пучка гибких волоконных светопроводов. Жесткость конструкции (светопроводы в пучке вблизи его торца залиты эпоксидной смолой) определяет постоянство доли вспышки, попадающей на каждое волокно. Между ЭЛД и светопроводами помещена заслонка со светофильтрами, с помощью которой можно по командам из ЭВМ изменять интенсивность вспышки либо полностью перекрывать световой поток. ЭЛД вспыхивает с частотой сети (60 Гц). По гибким светопроводам вспышки света передаются к каждому черенковскому детектору (через призмы с углами 30 или 45°) и к дополнительному опорному детектору. Призмы использовали лишь потому, что недостаток места в установке не позволял подвести оптические волокна перпендикулярно к поверхности фотокатодов ФЭУ. Опорный детектор снабжен световым источником 241Аm — NaI. Импульсы от детекторов поступают на АЦП, выполненные в стандарте КАМАК. и управляемые ЭВМ Sigma-5.
Всем процессом градуировки управляет ЭВМ. В течение цикла градуировки, когда заслонка открыта и вспышки света ЭЛД попадают на фотокатоды ФЭУ, в ЭВМ собирается следующая информация:
- амплитудные спектры вспышек от каждого черенковского детектора (даже при строго постоянной интенсивности вспышек конечное амплитудное разрешение ФЭУ приведет к появлению на их выходах амплитудного распределения конечной ширины). Для каждого спектра ЭВМ вычисляет средние значения M4i;
- амплитудный спектр вспышек от опорного детектора и его среднее значение Моп;
- амплитудный спектр источника 241Am—NaI от опорного детектора и его среднее значение Мис;
- измеренные значения пьедесталов АЦП (включая пьедестал Роп АЦП опорного детектора).
П
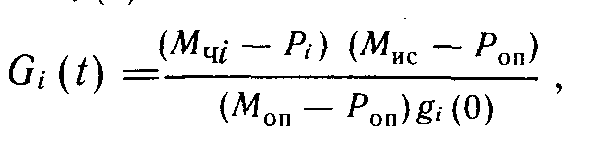
о этим данным ЭВМ вычисляет для каждого детектора поправочный коэффициент Gi(t):
где gi (0) — нормировочный коэффициент, определяемый при начальной градуировке ЭВМ записывает на магнитный диск массивы вычисленных коэффициентов G, и пьедесталов Рi, чтобы их можно было использовать при последующей обработке экспериментальных данных, записывает коэффициенты Gi в отдельный файл на магнитном диске, где ведутся «истории» каждого детектора, высвечивает на экране дисплея последние значения Gi, сильно изменившиеся по сравнению с последней градуировкой. Вся эта процедура занимает около 2 мин и выполняется автоматически обычно 1 раз за. цикл измерений (8 ч).
Тщательные измерения на пучке частиц строго известной энергии показали, что такая методика градуировки и компенсации дрейфа обеспечивает постоянство характеристик системы детекторов в течение 8 месяцев работы с погрешностью до 1%.
Описанная выше система калибровки черенковских счетчиков, несмотря на большое количество источников информации, могла обслуживаться непосредственно ЭВМ, поскольку частота световых градуировочных вспышек была невелика, а длительность процесса градуировки не имела существенного значения. В тех случаях, когда ЭВМ служит для приема не градуировочной, а физической информации, которая поступает, как правило, в случайные моменты времени, первичную обработку и анализ этой информации, особенно при большом количестве детекторов, целесообразно возложить на специальные аппаратные или аппаратно-программные средства.
Универсальным решением вопроса является использование в качестве таких средств микропроцессорных систем, «приближенных» к детекторам и управляемых единой ЭВМ. В качестве примера такого подхода к организации физического эксперимента рассмотрим установку для регистрации широких атмосферных ливней (ШАЛ)4.
Установка (рис. 1.16) состоит из сети черенковских и сцинтилляционных детекторов, расположенных на экспериментальной площадке размером порядка 1 км2. Наличие ливня определяется по одновременному срабатыванию семи детекторов — одного в центре площадки, трех на расстоянии 150 м от центра, и трех на расстоянии 500 м от центра. Эти детекторы связаны коаксиальными кабелями с логической схемой управления (ЛСУ), которая формирует триггер, т. е. сигнал, говорящий о наличии исследуемого события и используемый для запуска других электронных устройств установки, а также программ обработки пришедшего события.
Каждый детектор снабжен микропроцессорной системой (МПС), служащей для приема информации от детектора, первичного анализа этой информации и передачи ее в центральную ЭВМ, а также для контроля исправности детектора в определенные моменты времени.
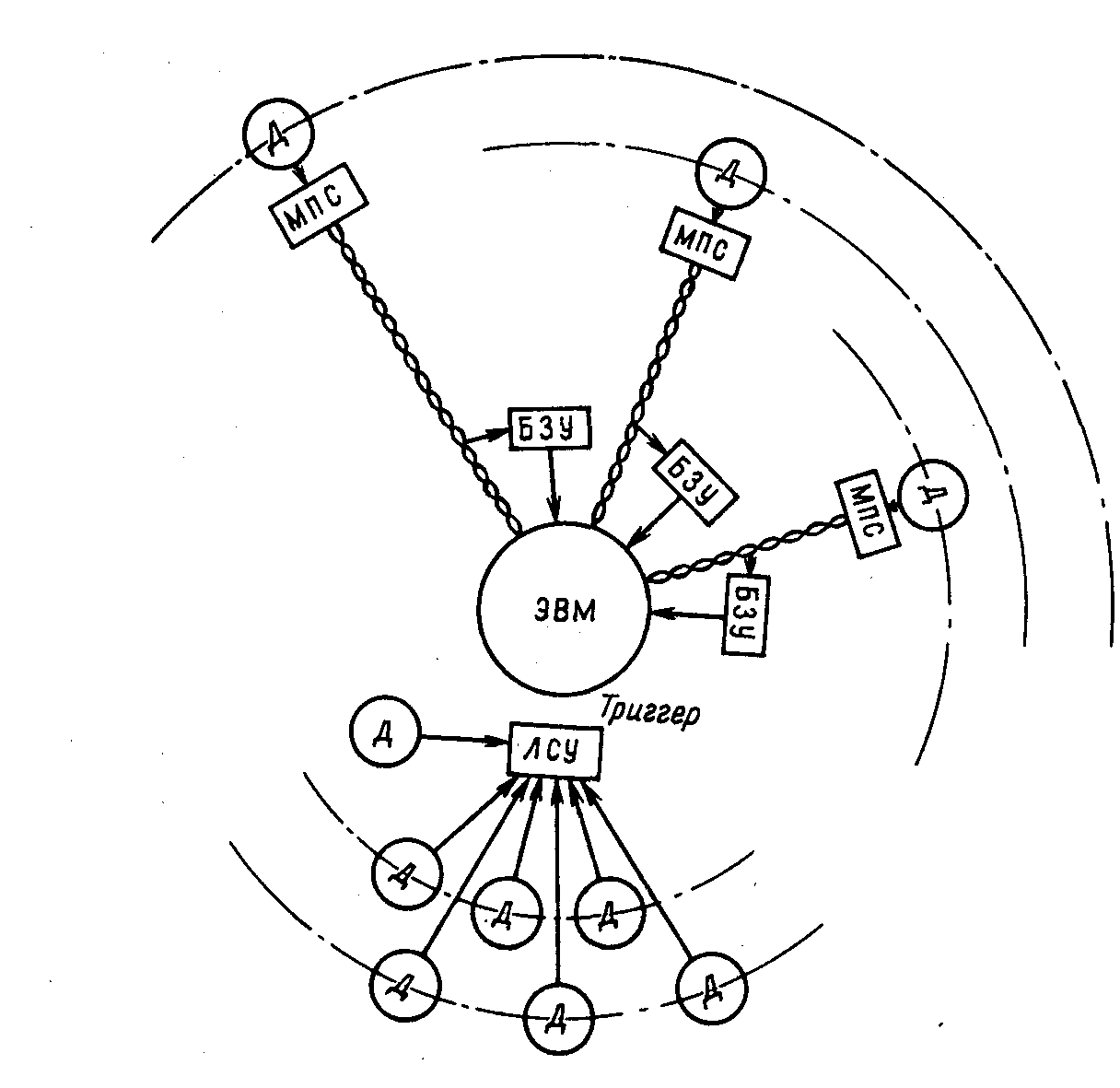
Рис. 1.16. Установка для регистрации широких атмосферных ливней
В центре экспериментальной площадки размещена управляющая ЭВМ North Star Horizon, связанная с каждой микропроцессорной системой сети парой скрученных проводов, образующих так называемую витую пару. Эта пара проводов используется как для передачи микропроцессору управляющей информации, так и для приема от него результатов измерений. Поскольку передача данных по витой паре происходит довольно медленно (9600 бит/с), центральная ЭВМ снабжена буферными запоминающими устройствами (БЗУ) небольшой емкости (16 12-битовых слов), в которые передается вся информация от детекторов и которые затем последовательно опрашиваются и считываются по командам ЭВМ.
Особенность регистрации ШАЛ заключается в том, что хотя ливни случаются редко (один ливень за несколько часов), интенсивность космического фона, регистрируемого каждым детектором, относительно высока и доходит до 500 событий в 1 с. Одиночные частицы фона сами по себе не отличаются от частиц ШАЛ, поэтому электроника детекторов фиксирует все частицы, однако результаты измерений характеристик зарегистрированной частицы передаются в ЭВМ лишь в том случае, если из ЛСУ в МПС пришел сигнал триггера.
Рассмотрим подробнее состав и работу микропроцессорной системы.
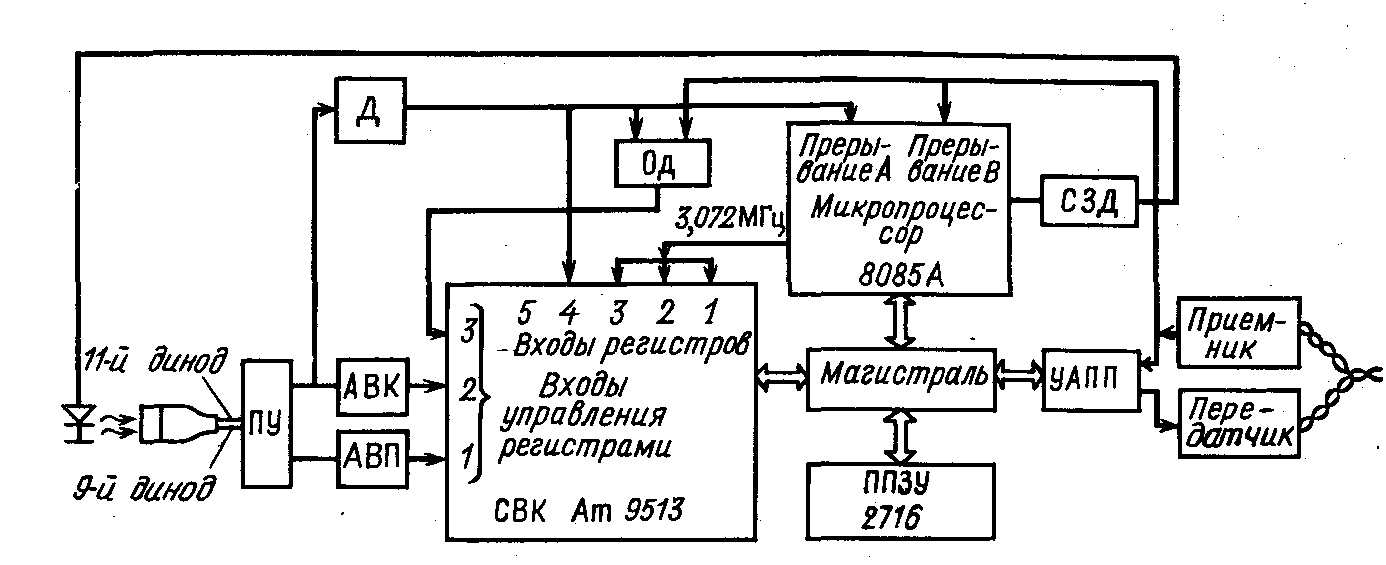
Рис. 1.17. Микропроцессорная система установки для регистрации ШАЛ
Основным узлом МПС (рис. 1.17) является микропроцессор 8085А, работающий как в режиме выполнения фоновой программы, так и в режиме прерываний. В микропроцессоре используются два входа запроса прерываний — Прерывание А и Прерывание В. Прерывание по входу А происходит при регистрации детектором частицы, прерывание по входу В — в случае прихода сигнала триггера.
Программы, которые должен выполнять микропроцессор, хранятся в БИС постоянного программируемого запоминающего устройства ППЗУ с серийным номером 2716. Фактически в ППЗУ находятся две программы: программа, которую микропроцессор выполняет постоянно, и программа, на которую он переходит в случае прерывания.
Микропроцессор связывается с «внешним миром» с помощью магистрали, включающей в себя шины адресов, данных и управления. К магистрали, кроме микропроцессора и ППЗУ, подсоединены также универсальный асинхронный приемопередатчик УАПП, через который происходит обмен данными с центральной ЭВМ, и БИС системного временного контроллера СВК Аm9513, который представляет собой фактически программируемый таймер и выполняет некоторые измерительные функции. Назначение СВК, а также остальных компонентов МПС объяснено ниже.
С детектора в МПС поступают два сигнала — с 9-го и с 11-го динодов ФЭУ. Этим достигаются высокая линейность и большой динамический диапазон при измерении энергии регистрируемых частиц— до 104. Сигналы с динодов, пройдя через предусилители ПУ, поступают на амплитудно-временные конверторы (АВК), выходные сигналы которых управляют 16-разрядными регистрами Р1 и Р2, входящими в состав СВК. Всего в СВК имеются пять программно-адресуемых регистров (программно-адресуемым называют регистр, в который можно записать или считать информацию с помощью программы, выполняемой микропроцессором).
Регистры Р1 и Р2, пока на их входах действуют сигналы от АВК, отсчитывают импульсы постоянной частоты 3,072 МГц, являющейся рабочей частотой микропроцессора. Таким образом, в Р1 и Р2 формируются коды амплитуд сигналов, снимаемых с динодов, и характеризующих энергию зарегистрированной частицы.
Сигнал с 11-го динода поступает также на дискриминатор Д, определяющий чувствительность МПС. Если амплитуда сигнала превысит порог срабатывания дискриминатора, то, во-первых, произойдет прерывание фоновой программы, выполняемой микропроцессором, и, во-вторых, запустится одновибратор Од с временем выдержки 22 мкс. Одновибратор может сброситься в исходное состояние и раньше, если на его вход придет сигнал триггера. Сигнал с выхода Од поступает на вход управления регистра Р3, входящего в состав СВК. Пока длится управляющий сигнал, регистр отсчитывает импульсы частотой 3,072 МГц. Таким образом, в случае прихода сигнала триггера в регистре РЗ сформируется код интервала времени между моментом срабатывания данного детектора и моментом прихода сигнала триггера. Поскольку детекторы разбросаны на большой площади, при прохождении сигналов возникают заметные задержки. Кроме того, формирование сигнала триггера также требует некоторого времени. Время выдержки Од выбрано так, что оно несколько превышает максимально возможную временную задержку в системе.
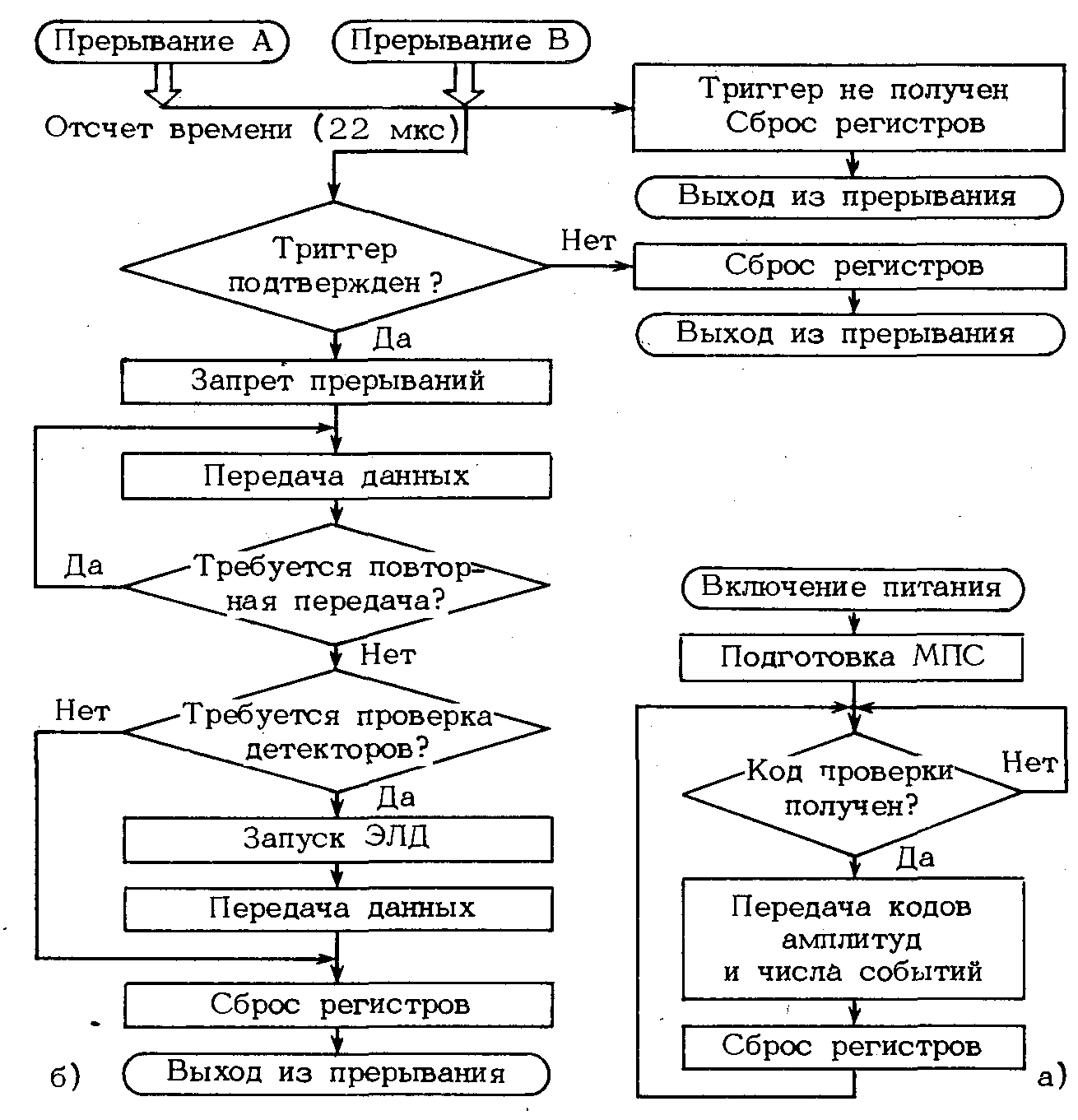
Рис. 1.18. Структурная схема программы микропроцессора
Микропроцессор, выполняя программы, хранящиеся в ППЗУ, управляет работой СВК и УАПП и, кроме того, организует регулярную проверку работоспособности детектора. Фоновая программа (рис. 1.18, а) производит регулярный опрос выхода УАПП в ожидании команды от центральной ЭВМ (в виде определенного кода) на проверку детектора. Регистрация детектором частицы приводит к прерыванию (по входу Прерывание А, рис. 1.18, б) фоновой программы и включению отсчета времени в ожидании сигнала триггера. Если этот сигнал не получен в течение 22 мкс после срабатывания детектора, микропроцессор очищает регистры амплитуды сигнала (Р1 и Р2) и регистр временной задержки (РЗ) и возвращается в фоновую программу. Если же сигнал триггера приходит в течение 22 мкс, он вызывает высокоприоритетное прерывание (по входу Прерывание В), в результате чего микропроцессор переходит на выполнение программы передачи данных. Начинается эта программа с фиксации данных в регистрах СВП Р1, Р2 и РЗ и ожидания кода подтверждения сигнала триггера. Код подтверждения вырабатывается центральной ЭВМ и служит гарантией от случайного (от шумового сигнала) прерывания микропроцессора и передачи в ЭВМ данных, когда она не готова к их приему. Если подтверждение получено, запрещается работа конверторов и блокируются сигналы прерываний, чтобы предотвратить возможное искажение данных. Затем по линии связи с ЭВМ посылается код-идентификатор данного детектора и передается содержимое регистров Р2, РЗ и Р1, т. е. информация об энергии зарегистрированной частицы и интервале времени между моментом ее регистрации и приходом сигнала триггера. По значению этой временной задержки можно уточнить, принадлежит ли данная частица ШАЛ. Завершив передачу информации, микропроцессор опрашивает выход УАПП, ожидая от ЭВМ либо кода повторной передачи данных (если ЭВМ обнаружила ошибку передачи; в этом случае передача повторяется), либо кода проверки детекторов, которая производится всегда после прохождения ШАЛ. В последнем случае микропроцессор включает схему запуска электролюминесцентного диода СЗД, освещающего фотокатод ФЭУ детектора. Коды амплитуд сигналов с динодов ФЭУ, образованные в регистрах Р1 и Р2, передаются в ЭВМ. После этого все регистры МПС очищаются, блокировка снимается и весь блок детектирования переходит в состояние ожидания события.
Каждые два часа центральная ЭВМ посылает во все МПС код, требующий проверки детекторов. В ответ на этот сигнал микропроцессор передает в ЭВМ коды амплитуд из регистров Р1 и Р2, а также информацию о полном числе частиц, зарегистрированных детектором за истекшие два часа работы. Эта информация накапливается в регистре Р4.
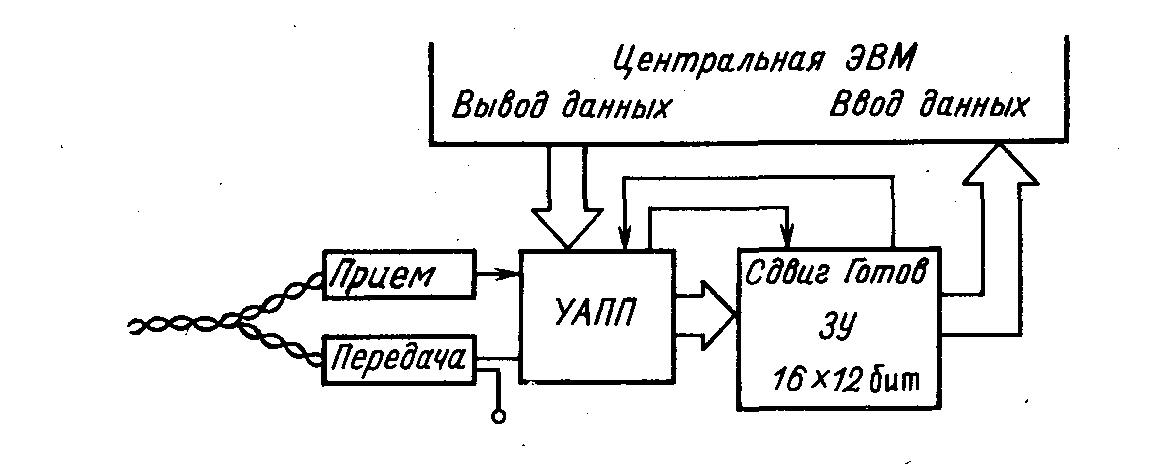
Рис. 1.19. Интерфейс центральной ЭВМ
Центральная ЭВМ управляет всем ходом эксперимента. Она также собирает данные от детекторов, накапливает их в своей оперативной памяти и затем записывает на гибкий магнитный диск. Для приема данных от МПС на каждом входе ЭВМ установлен специальный интерфейс (рис. 1.19). Данные от МПС, поступающие разряд за разрядом по линиям связи, объединяются в УАПП в слова и записываются в ЗУ, работающее в режиме сдвигового регистра. Объем ЗУ позволяет принять в него всю информацию об одном событии. При этом ЗУ и УАПП связаны таким образом, что данные, поступающие по линии связи, загружаются в ЗУ без участия центральной ЭВМ. Это дает возможность одновременного приема данных из всех. МПС (от каждого в свое ЗУ).
Центральная ЭВМ, получив сигнал триггера, посылает сигналы прерывания и подтверждения триггера во все МПС и, установив наличие данных в ЗУ, последовательно опрашивает ЗУ, перенося информацию из них в оперативную память ЭВМ. Обнаружив ошибку передачи, ЭВМ запрашивает повторную передачу данных из МПС. После того как все данные перенесены в оперативную память, ЭВМ посылает во все МПС код, инициирующий проверку детекторов. Данные проверки принимаются ЭВМ точно так же, как и результаты регистрации частицы. После этого ЭВМ ожидает прерывания от следующего сигнала триггера.
Описанная здесь система представляет собой достаточно характерный пример автоматизированной физической установки, использующей ряд типичных решений:
- При большом количестве источников информации (детекторов) использована идея распределенного интеллекта. Каждый детектор снабжен небольшой программно-управляемой системой сбора данных, управления и контроля.
- Локальные системы управления выполнены на базе микропроцессорного набора, что обеспечивает высокую степень интеллектуальности при низкой стоимости и простоте реализации.
- Использована иерархическая двухуровневая система, на нижнем уровне которой находятся микропроцессорные системы, а на верхнем — центральная управляющая ЭВМ.
- Получаемые в процессе эксперимента данные вместе со служебной информацией об условиях измерений (астрономическое время, атмосферное давление, характеристики детекторов) записываются на диск для последующей автономной обработки (уже не в реальном времени эксперимента).
- Для согласования скоростей передачи и приема информации использованы промежуточные запоминающие устройства.
- Поскольку элементы системы расположены на значительном удалении друг от друга, возникает проблема передачи информации между ними. Связь детекторов и ЛСУ, вырабатывающей сигнал триггера, осуществляется по коаксиальным кабелям, обеспечивающим высокую скорость и помехоустойчивость передачи аналоговой информации и, что существенно в данном случае, строго фиксированное время прохождения сигнала. Однако такая связь дорога, тем более что передача цифровой информации требует большого количества линий связи (по числу информационных разрядов). Поэтому в рассматриваемой системе использован последовательный интерфейс передачи, который предполагает передачу каждого информационного слова последовательно, бит за битом. УАПП как раз и выполняет функцию преобразования содержимого информационных регистров МПС в последовательность отдельных битов. УАПП, стоящий на входе центральной ЭВМ, выполняет обратное преобразование. Последовательная передача данных осуществляется с невысокой скоростью (обычно не выше 9600 бит/с), но позволяет использовать дешевые линии связи — витые пары или стандартные телефонные кабели.
В описанных выше автоматизированных системах, независимо от их сложности, количества информации и универсальности программного обеспечения, использовался, строго говоря, однозадачный (однопрограммный) режим работы ЭВМ. Конечно, управляющая программа может в зависимости от запросов экспериментатора или по заданному заранее алгоритму обращаться к тем или иным подпрограммам, она может прерываться для выполнения программ обработки прерываний, однако все эти программы связаны в единый программный комплекс и функционируют в сущности как одна сложная программа с разветвлениями.
Довольно часто, однако, ЭВМ управляет одновременно несколькими экспериментальными установками. В этом случае удобнее пользоваться многозадачным режимом, когда ЭВМ параллельно выполняет несколько независимых задач (программ), которые могут быть каким-то образом связаны друг с другом, например иметь общую библиотеку стандартных подпрограмм либо общие области данных, но могут быть и совершенно независимыми. Важно, что функционально эти задачи не связаны: прекращение выполнения одной из них в случае завершения измерений на конкретной установке никак не отразится на выполнении остальных.
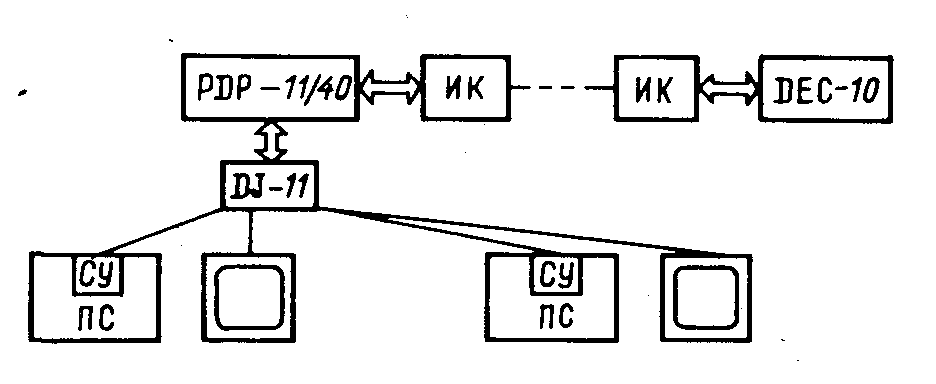
Рис 1.20. Многопользовательская система для анализа фильмовой информации
Примером реализации такой методики является многопользовательская система анализа фотографии треков с пузырьковых камер, построенная в Институте высоких энергий при Брюссельском университете5. Установка (рис. 1.20) включает в себя пять просмотровых столов ПС, на которых производится визуальный просмотр снимков и оцифровка треков, и мини-ЭВМ PDP-11/40, служащую для управления столами и приема от них измерительной информации. Мини-ЭВМ. PDP-11/40 через интерфейсные карты ИК связана с ЭВМ DEC-10, на которой производится обработка трековой информации с помощью пакета прикладных программ HYDRA.
Просмотровый стол представляет собой сложную конструкцию, содержащую проекционную систему для одновременного визуального наблюдения с соответствующим увеличением четырех кадров, устройства смены и позиционирования кадров, устройства слежения за треком и получения его координат. Управление столом может производиться как вручную, для чего предусмотрен пульт с ключами и средствами индикации функций и состояния ключей, так и автоматически по командам ЭВМ.
Цифровая система управления столом (СУ) содержит группу программно-адресуемых регистров, связанных с ключами управления, кодирующим устройством, механизмами перемещения пленки, а также электронные схемы формирования и расшифровки передаваемых сообщений.
Каждый просмотровый стол оснащен алфавитно-цифровым дисплеем-, с помощью которого оператор посылает в ЭВМ запросы на обслуживание и управляющую информацию.
Проблема связи ЭВМ со многими источниками информации решена путем использования серийно выпускаемого 16-разрядного мультиплексора DJ-11, преобразующего 16-разрядные слова ЭВМ в последовательность битов, которые можно передавать со скоростью до 9600 бит/с по двухпроводным линиям связи (в состав DJ-11 входят УАПП, описанные выше). Мультиплексор DJ-11 предназначен для подсоединения к ЭВМ удаленных печатающих устройств, алфавитно-цифровых терминалов, телетайпов и пр. Каждая просмотровая установка использует два канала мультиплексора. К одному каналу подсоединен терминал, к другому — система управления столом. Ясно, что СУ должна иметь на выходе устройство типа УАПП. Такая конфигурация установки позволяет использовать стандартное программное обеспечение ЭВМ PDP-11.
PDP-11 работает под управлением многопользовательской операционной системы реального времени RSX-11M. Каждый просмотровый стол обслуживается отдельной задачей — копией управляющей программы. Операционная система контролирует ход вычислительного процесса, передавая управление от задачи к задаче по мере появления запросов, выгружая временно задачи на диск в случае нехватки места в оперативной памяти и т. д. Практически все задачи находятся в состоянии ожидания. Нажатие на клавишу терминала вызывает прерывание этого состояния и переход на программу анализа кода нажатой клавиши, а оттуда — на программу выполнения затребованных действий.
Разработка электронно-измерительных систем для обеспечения физических экспериментов является сложной и трудоемкой задачей. Несмотря на использование модульных программно-управляемых систем, унифицированных средств сопряжения с ЭВМ и готовых элементов программного обеспечения, создание новой или даже модернизация уже имеющейся измерительно-вычислительной системы требует значительных усилий и времени. Отсюда понятно стремление к разработке в достаточной степени универсальных систем сбора и обработки физической информации, способных обеспечить не один, а целую группу схожих по методике экспериментов. Такие системы обычно создаются на базе крупных исследовательских источников излучений — ускорителей и реакторов. Примером такого подхода является разработанная в Ленинградском институте ядерной физики им. Б. П. Константинова автоматизированная электронно-измерительная система для обеспечения экспериментов по квазиупругому рассеянию нуклонов при энергии 1 ГэВ6.
Квазиупругое рассеяние нуклонов относится к числу реакций прямого взаимодействия, в которых быстрый налетающий нуклон взаимодействует с одним нуклоном ядра, передавая ему часть своей энергии и импульса. В результате рассеянный нуклон продолжает свое движение под некоторым углом 6, к первоначальному направлению, а нуклон, с которым произошло взаимодействие, вылетает из ядра под углом 02. Определенный импульс приобретает также ядро отдачи. Если налетающая частица — протон, то в случае испускания нейтрона реакцию можно записать следующим образом:
Изучение процесса квазиупругого7 рассеяния представляет большой интерес, так как дает сведения о деталях внутренней структуры ядра. Экспериментальное исследование квазиупругого рассеяния нуклонов требует идентификации полезных событий, определения типа выбиваемого нуклона, измерения энергии и углов вторичных частиц и последующего восстановления кинематической схемы каждого акта рассеяния. Для этого в ЛИЯФ была создана экспериментальная установка (рис. 1.21). Пучок ускоренных протонов с энергий 1 ГэВ падает на мишень М, расположенную в вакуумной камере. Рассеянные протоны регистрируются магнитным спектрометром с времяпролетной системой; для регистрации выбитых нуклонов (протона или нейтрона) предусмотрен сцинтилляционный годоскоп, представляющий собой спектрометр по времени пролета.
Р
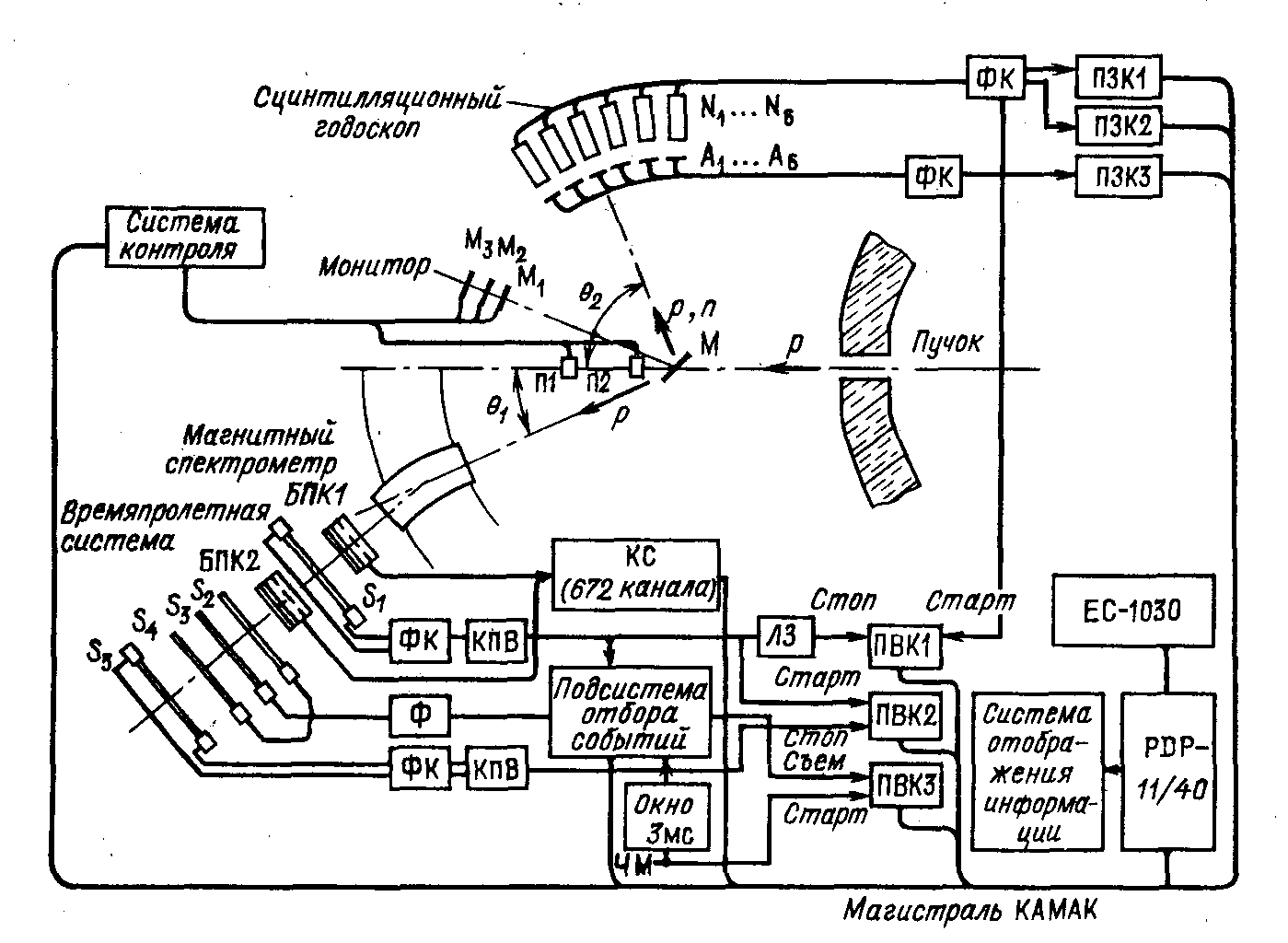
ис.1.21. Схема экспериментальной установки для изучения рассеяния протонов на ядрах
Кроме собственно измерительных элементов установка содержит профилометры П1 и П2 для точного определения положения пучка, сцинтилляционный монитор из трех включенных на совпадения детекторов М\, М2, и М3 для измерения интенсивности пучка, а также не показанные на рисунке фокусирующие системы, коллиматоры, отклоняющие и корректирующие магниты и другие системы формирования и транспортировки пучка. Работа установки обеспечивается автоматизированной измерительной системой, выполненной в стандарте КАМАК и включающей в себя подсистемы измерений, градуировки, стабилизации, контроля и управления. Контроль за работой аппаратуры и прием экспериментальных данных осуществляет ЭВМ PDP-11/40; для накопления и предварительной обработки информации с целью оперативного контроля за ходом эксперимента используется ЭВМ ЕС-1030.
Рассмотрим подробнее основные узлы установки и соответствующие им элементы измерительной системы.
Магнитный спектрометр предназначен для измерения энергий протонов, рассеянных на мишени под фиксированным углом 0i в пределах диапазона 12—25°. Детектирующая система спектрометра состоит из двух блоков проволочных пропорциональных камер БПК1 и БПК2 и телескопа сцинтилляционных детекторов S1 S2 S3 S4, S5.
Проволочные пропорциональные камеры служат для измерения параметров траекторий протонов в фокальной зоне спектрометра. В каждой камере используются 192 вертикально расположенных проволочных электрода для определения координаты частицы в горизонтальной плоскости (плоскость чертежа на рис. 1.21) и 144 горизонтально расположенных электрода для определения вертикальной координаты частицы. Горизонтальная координата траектории протона в фокальной зоне магнита спектрометра определяется его энергией, а вертикальная отражает вертикальный размер мишени. Наличие двух камер, расположенных на некотором расстоянии друг от друга, позволяет определить угловые составляющие траектории протона: горизонтальную 01 и вертикальную Ф (в пределах углов раствора спектрометра, которые составляют ±0,4° по горизонтали и ±0,95° по вертикали).
Для регистрации информации, поступающей с пропорциональных камер, используется 672-канальная координатная система КС, включающая в себя набор предусилителей и регистров.
Телескоп сцинтилляционных счетчиков S1 — S5 выполняет следующие функции:
- отбор полезных событий (упруго рассеянных протонов) по четырехкратным совпадениям S1-S2-S3-S4;
- задание нуля отсчета времени, за который принимается момент прохождения протона через детектор S\;
- режекцию фона путем фиксации времени пролета протоном пролетной базы 5 м между детекторами S1 и S5.
Для достижения необходимой точности при временном отборе событий в телескопе использованы пластические сцинтилляторы, имеющие малое время нарастания выходного импульса тока, временные ФЭУ со специальными низкоомными цепями питания и быстрые формирователи Ф. Особенно высокие требования предъявляются к формированию импульса нуля времени. Как известно, основными источниками аппаратурной неопределенности временной привязки являются зависимость момента срабатывания формирователя от амплитуды сигнала на выходе ФЭУ, а также флуктуации времени распространения света в кристалле, обусловленные неопределенностью места попадания частицы и возникновения сцинтилляции. Для уменьшения первой составляющей погрешности в детекторе S1 используется формирователь ФК с компенсацией амплитудно-временной зависимости, обеспечивающий привязку к фиксированной фазе входного сигнала. С целью уменьшения второй составляющей кристалл детектора S, просматривается ФЭУ с обоих торцов, и полученные с ФК импульсы обрабатываются специальным компенсатором пространственно-временной неопределенности КПВ, с помощью которого выделяется среднее значение Интервала времени перекрытия входных сигналов. Легко видеть, что в этом случае задержка света в кристалле приводится к центру кристалла независимо от того, где конкретно возникла сцинтилляция. Аналогичную систему формирования сигнала временной отметки имеет детектор S5.
Для регистрации продуктов реакций (р, 2р) и (р, пр) в установке предусмотрен шестиканальный годоскоп сцинтилляционных детекторов N1 —N5. Использованные в нем пластические сцинтилляторы большого размера обеспечивают достаточно высокую эффективность регистрации нейтронов (около 30%); эффективность регистрации протонов практически равна 100%. Для разделения нейтральных и заряженных частиц перед каждым детектором Ni, установлен "тонкий детектор А, у которого эффективность регистрации нейтронов незначительна (меньше 5%), а эффективность регистрации протонов близка к 100%. Таким образом, совпадение во времени моментов срабатывания обоих детекторов канала свидетельствует о регистрации заряженной частицы, несовпадение — о регистрации нейтральной. Поскольку для заряженных частиц тонкий детектор Ai регистрирует удельные потери энергии dE/dx, появляется дополнительная возможность разделения заряженных частиц, например протонов и л-мезонов, возникающих при взаимодействии протонов высокой энергии с ядрами мишени, по значению dE/dx. Для измерения энергии, потерянной регистрируемой частицей в детекторах N1--6 и A1--6, используются преобразователи заряд — код ПЗК1 и ПЗКЗ соответственно.
В годоскопе предусмотрена также возможность разделения нейтральных частиц (нейтронов и у-квантов) по форме импульса на выходе сцинтилляционного детектора. Как известно, световая вспышка многих сцинтилляторов имеет крутой нарастающий участок (постоянная времени 0,5—2 нc) и спадающий участок сложной формы, в котором можно выделить несколько экспоненциальных компонент, различающихся постоянными времени и амплитудами. При возбуждении сцинтиллятора частицами с различной ионизирующей способностью изменяется относительный вклад медленных компонент в общую светосумму, причем чем выше ионизирующая способность частицы, тем большую амплитуду имеют медленные компоненты. Для выделения заряда, соответствующего медленным компонентам, в установке используется дополнительный преобразователь ПЗК2, запускаемый с некоторой задержкой по отношению к запуску ПЗК.1. Сравнение кодов, снимаемых с ПЗК1 и ПЗК2, позволяет оценить отношение полного заряда к заряду медленных компонент и идентифицировать частицу.
Основной задачей годоскопа является измерение энергий и углов вылета нуклонов — продуктов реакции. Угол вылета определяется по номеру сработавшего детектора Ni , а энергия нуклона — по разности времени пролета вторичных частиц фиксированных баз в каналах магнитного и сцинтилляционного спектрометров. Фактически это сводится к измерению интервала времени между срабатываниями детекторов Ni и S1. Для измерения этого интервала сигналы от детекторов Ni, через соответствующие формирователи поступают на преобразователь время — код ПВК1. Измерения ведутся в обратной шкале времени, т. е. преобразователь запускается сигналом от детектора Ni, а останавливается задержанным с помощью стабильной линии задержки ЛЗ сигналом нуля времени с выхода детектора S1.
Преобразователь ПВК2 измеряет пролетное время между детекторами S1 и S5. Преобразователь ПВКЗ служит для определения момента регистрации полезного события. Он запускается частотным маркером ЧМ — импульсом, связанным с началом вывода пучка из ускорителя. Регистрация полезного события не останавливает ПВК2, но приводит к съему его текущих показаний.
Предварительный отбор полезных событий осуществляется посредством наносекундных логических схем, входящих в программно-перестраиваемую подсистему отбора событий. Полезным считается событие, удовлетворяющее выполнению следующих условий:
- произошло совпадение S1-S2-S3-S4 при условии отсутствия такого совпадения в предыдущем микроимпульсе пучка;
- событие попало в окно длительностью 5 мс, устанавливаемое по сигналу частотного маркера в пределах длительности пучка;
- срабатывание времяпролетной системы магнитного спектрометра совпало (в пределах возможной разницы пролетных времен) со срабатыванием одного из каналов годоскопа. При этом появление событий Ai Ni свидетельствует о регистрации протона, а Ai Ni — о регистрации нейтрона.
- При выполнении условий отбора полезного события выполняются следующие операции:
- фиксируется номер i сработавшего канала и признак заряженной или нейтральной частицы;
- запускаются преобразователи ПВК1 и ПВК2;
- переписывается в соответствующий регистр код текущего времени с преобразователя ПВКЗ;
- преобразователи ПЗК1, ПЗК2 и ПЗКЗ подсоединяются к выходам формирователей сработавшего канала сцинтилляционного годоскопа.
Если зарегистрированные коды не выходят за установленные заранее границы и при этом сработал лишь один из каналов годоскопа, разрешается работа регистрирующей системы магнитного спектрометра. Происходит съем информации с пропорциональных камер БПК1 и БПК2 в регистры координатной системы, откуда в дальнейшем они переписываются в буфер в оперативной памяти ЭВМ PDP-11. В буфере собирается вся информация о зарегистрированном событии: координаты траектории частицы, полученные с БПК1 и БЯ/С2, коды зарядов с трех преобразователей ПЗК1— ПЗКЗ, коды интервалов времени с трех преобразователей ПВК1— ПВКЗ, признак частицы. После набора 150 событий буфер дополняется служебной информацией: параметрами траектории пучка, полученными с профилометров П1 и П2, которые представляют собой, как и блоки БПК, проволочные пропорциональные камеры, показаниями монитора, показаниями систем стабилизации и градуировки и проч. После накопления в памяти заданного числа буферов информация о зарегистрированных событиях отображается на экране цветного дисплея и передается в память ЭВМ ЕС-1030 для дальнейшей обработки.
Для рассмотренного комплекса, представляющего собой сложный, но во многих отношениях типичный пример измерительно-вычислительной системы для обслуживания физического эксперимента, характерно сочетание аппаратных и программных средств анализа и отбора событий. Быстрые логические схемы подсистемы отбора событий на аппаратном уровне анализирует совокупность характеристик зарегистрированного события, и в случае удовлетворения их заданным (в частности, программным способом) критериям отбора разрешают преобразование измеряемых величин в цифровые коды и дальнейшую передачу информации в ЭВМ. Нарушение условий отбора влечет за собой образование сигнала Быстрый сброс и возвращение системы в исходное состояние. Не все отобранные таким образом события оказываются в действительности полезными. Окончательный анализ событий, требующий значительных затрат времени, в частности разделение актов регистрации нуклонов и л-мезонов, проводится с помощью соответствующих программных средств уже после окончания эксперимента. Такая методика позволяет добиться малого мертвого времени системы и высокой эффективности сбора полезной информации.
Рассмотренные примеры иллюстрируют многообразие средств и методов автоматизации современного эксперимента. Общим для них является использование ЭВМ, микропроцессорной техники и программно-управляемых электронных систем.
КОНТРОЛЬНЫЕ ВОПРОСЫ К ГЛАВЕ 1
1. Какие основные технические средства используют непосредственно для автоматизации измерений:
а) измерительную аппаратуру экспериментальной установки;
б) ЭВМ и средства связи с измерительной аппаратурой
в) только ЭВМ с необходимым набором стандартных внешних устройств?
2. Какие основные требования предъявляются к вычислительным средствам для работы в режиме на линии в эксперименте:
а) максимальное быстродействие;
б) компактность, экономичность, наличие связи с другой ЭВМ;
в) достаточная вычислительная мощность и удобство связи с измерительной аппаратурой эксперимента?
3. Что представляет собой система КАМАК:
а) набор конструктивных элементов;
б) электронную модульную систему, специально ориентированную на работу с ЭВМ;
в) набор электронных устройств, каждое из которых по индивидуальному
ГЛАВА 2
ОСНОВЫ СИСТЕМЫ КАМАК
§ 2.1. СТАНДАРТЫ СИСТЕМЫ КАМАК
Стандарты любой электронной модульной системы определяют основные положения, которыми следует руководствоваться при разработке, производстве и применении отдельных компонентов системы и всей системы в целом.
Основные принципы системы КАМАК изложены в трех тандартах — механическом, _ электрическом и логическом, которые впервые были представлены в соответствующих публикациях Комитета ESONE, а затем и в отечественной литературе.
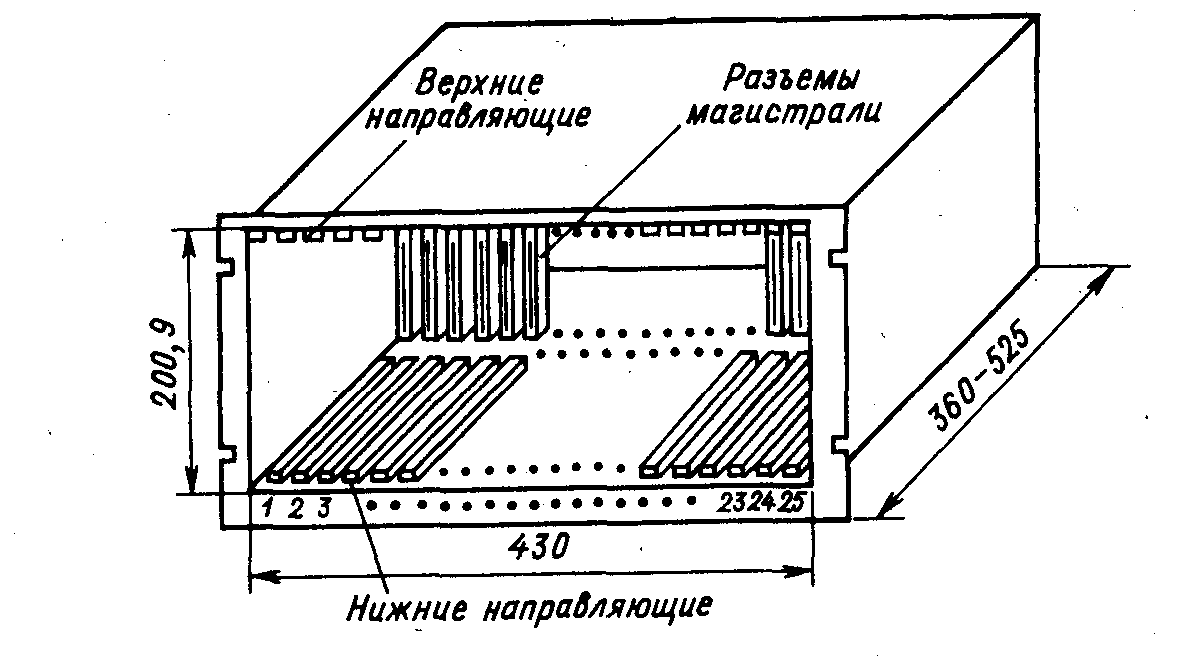
Рис. 2.1. Крейт КАМАК
Некоторые положения стандартов уточнялись и дополнялись по мере накопления опыта эксплуатации системы КАМАК в научных лабораториях.