
Автоматизация
| Вид материала | Документы |
СодержаниеРазвитие электронных модульных систем для автоматизации научных исследований Протокол R/G (от английского Request/Grant-Запрос/ Разрешение). Протокол АСL Контрольные вопросы к главе 4 |
- В. И. Харитонов > К. И. Меша Одобрено методической > С. С. Драгунов комиссией факультета, 321.05kb.
- Темы курсовых проектов Автоматизация учета налогоплательщиков (НП) физических и юридических, 19.54kb.
- Автоматизация бухгалтерского учета нужна ли она?, 216.55kb.
- Программа вступительного экзамена по приему в магистратуру по специальности 6М070200, 225.94kb.
- Автоматизация работы программ расчета, 29.26kb.
- Автоматизация и моделирование работы предприятий по строительству промышленных объектов, 445.96kb.
- Автоматизация процессов мониторинга объектов железнодорожной инфраструктуры на основе, 315.84kb.
- К рабочей программе учебной дисциплины «Интегрированные системы проектирования и управления»», 31.58kb.
- Автоматизация процесса формирования индивидуальных учебных планов в системе переподготовки, 256.55kb.
- Темы курсовых работ По дисциплине «Бухгалтерские информационные системы» Автоматизация, 14.74kb.
РАЗВИТИЕ ЭЛЕКТРОННЫХ МОДУЛЬНЫХ СИСТЕМ ДЛЯ АВТОМАТИЗАЦИИ НАУЧНЫХ ИССЛЕДОВАНИЙ
§4.1.МИКРОПРОЦЕССОРЫ В СИСТЕМАХ АВТОМАТИЗАЦИИ ИЗМЕРЕНИЙ
Развитие элементной базы электронного приборостроения всегда оказывает активное влияние на разработку аппаратуры для научных исследований. К середине 70-х годов бурное развитие технологии производства больших интегральных схем и микропроцессоров в значительной степени определило дальнейший путь создания измерительных приборов и, в частности, аппаратуры для ядерных физических исследований. Вычислительные средства и средства управления экспериментом, выполненные на базе микропроцессоров, стали входить в аппаратуру как неотъемлемая часть различных специализированных приборов. В первую очередь применение таких микро-ЭВМ было оправдано там, где использование программируемых средств управления и обработки необходимо, но введение в состав измерительных трактов универсальных промышленных микро- и мини-ЭВМ технически и экономически нецелесообразно.
Ко времени широкого выпуска и освоения микропроцессоров в большинстве научных лабораторий уже было накоплено значительное количество функциональных модулей системы КАМАК, возможности которой при организации измерительных систем на линии с ЭВМ удовлетворяли большинству требований при постановке экспериментов в физике низких, средних и высоких энергий. Во многих случаях применение промышленных ЭВМ в измерительных комплексах было вызвано не необходимостью использования их широких возможностей, а чисто организационными причинами, например отсутствием доступных более простых и дешевых вычислительных средств. Применение микропроцессоров и схем большой степени интеграции при проектировании контроллеров крейта позволило разработчикам вводить в состав контроллеров микро-ЭВМ, которые, хотя и обладали ограниченными возможностями по сравнению с универсальными ЭВМ, тем не менее позволяли в полной мере обеспечить проведение многих, особенно рутинных измерений, при оптимальных затратах на оборудование экспериментальных установок. Определенные неудобства в использовании некоторых типов автономных контроллеров связаны с тем обстоятельством, что экспериментаторам необходимо осваивать новый для них язык программирования и операционные системы с учетом программного обеспечения ЭВМ, выполненной на базе конкретного микропроцессорного набора.
Достижения в области технологии производства печатных плат и высокая степень интеграции микросхем, особенно оперативных и перепрограммируемых запоминающих устройств, позволили реализовать автономные контроллеры крейта с включением их в состав необходимых атрибутов (процессор, контроллеры и интерфейсы внешних устройств) наиболее распространенных микро-ЭВМ, например таких, как НЦ-80. К таким контроллерам может быть подключен необходимый минимальный набор стандартных для ЭВМ внешних устройств — дисплей, флоппи-диск, АЦПУ, которые обеспечивают определенную гибкость взаимодействия измерительной системы в ходе эксперимента. При таком подходе к организации измерений на стадии подготовки программного обеспечения в распоряжении экспериментатора имеются широкие возможности использования таких автономных программно совместимых ЭВМ, как «Электроника-60», СМ-4 и их модификации с большим арсеналом программных средств и технической документацией к ним.
С развитием экспериментальных исследований в любой области науки наблюдается тенденция к росту потоков информации от экспериментальных установок, увеличению скорости обработки данных, появляется необходимость в более оперативном участии экспериментаторов непосредственно в процессе измерений. Особенно остро эти и многие другие проблемы, связанные с интенсификацией исследований, встают при проведении экспериментальных работ в ядерной физике и физике элементарных частиц. Процесс этот вполне закономерен, поскольку исследователи, работающие в этих областях, все глубже проникают в структуру материи, изучают все более тонкие эффекты взаимодействия между отдельными элементами структуры. Изучение структуры ядра и элементарных частиц, наконец самого характера ядерных взаимодействий требует сопоставления совокупности отдельных актов элементарных взаимодействий при чрезвычайно малой вероятности искомого события в конкретном процессе взаимодействия. Так, при экспериментальном изучении вопросов несохранения пространственной (Р) и комбинированной (СР) четностей в физике элементарных частиц нарушения Р-четности в делении тяжелых ядер вероятности регистрации полезных событий находятся на уровне 10-3—10-6. В таких измерениях для достижения необходимой статистической точности конечного результата требуется длительное накопление регистрируемых событий при максимально возможной интенсивности их на входе измерительной системы.
Многопараметрические измерения в физике деления, дающие наиболее полную информацию о столь сложном явлении природы, как деление ядер, требуют сортировки, накопления и обработки громадных массивов информации, прямая регистрация которых с целью последующей сортировки и обработки либо практически невозможна, либо настолько занимает процессорное время ЭВМ, входящей в состав экспериментального комплекса, что выполнение ею других важных функций в ходе измерений (предварительная обработка данных, представление результатов обработки, управление ходом эксперимента и т. п.) становится нереальным.
При проведении сложных экспериментальных работ, в которых необходимо эффективное участие ЭВМ в течение всего времени измерений, наиболее разумно вводить в состав экспериментальных комплексов кроме центральной универсальной ЭВМ несколько дополнительных периферийных вычислительных устройств. На эти устройства в зависимости от их возможностей могут быть возложены различные функции, связанные с сортировкой, предварительной обработкой поступающей информации, а также управлением работой отдельных элементов оборудования в ходе измерений, освобождая от этих рутинных операций центральную ЭВМ. Все периферийные вычислительные устройства должны иметь возможность связи по соответствующим магистральным каналам с центральной ЭВМ экспериментального комплекса. Подобные системы, в которых вычислительная мощность и средства управления распределены между несколькими устройствами, принято называть системами с распределенным интеллектом, или многопроцессорными системами, в отличие от систем с сосредоточенным интеллектом, где все функции, связанные с организацией работы системы и обработкой поступающей информации, возлагаются на единственную ЭВМ измерительного комплекса.
В качестве элементной базы периферийных вычислительных устройств широко применяют микропроцессоры и микросхемы большой степени интеграции. Собственно сама идея использования принципа распределенного интеллекта в локальных измерительных системах стала экономически целесообразной и технически выполнимой лишь благодаря развитию и освоению микропроцессорной техники. Эта идея оказалась столь плодотворной и полезной для многих применений, что к середине 80-х годов был предложен ряд стандартов на магистрали и конструкционные элементы, позволяющие создавать на их основе новые электронные модульные системы, специально ориентированные на использование микропроцессоров в отдельных функциональных модулях. Большинство из этих стандартов приняты как национальные или отраслевые стандарты в ряде стран.
Следует отметить, однако, что в силу ряда особенностей большинство модульных систем ориентировано главным образом на использование в тех случаях, когда конфигурация установок в процессе эксплуатации изменяется достаточно редко. Например, их целесообразно использовать для автоматизации управления крупными физическими установками типа реакторов, ускорителей. Они могут оказаться удобными для автоматизации рутинных измерений и технологических процессов для поддержания определенных условий в ходе эксперимента и т. п. Лишь одна из новых модульных систем, а именно система FASTBUS, разрабатывалась специально для автоматизации измерений в ядерно-физических центрах, главным образом, при исследованиях в физике высоких энергий (см. § 4.4). Здесь же в последнее время начинает активно использоваться новая модульная система под названием VME.
Несмотря на интенсивные разработки новых электронных модульных систем, в большинстве научных лабораторий, и в особенности в ядерно-физических центрах, базовой аппаратурой для автоматизации измерений продолжает оставаться система КАМАК. По этой причине все новые идеи, связанные с увеличением скорости обработки и накопления информации, которые появляются в связи с необходимостью постановки сложных экспериментов, а также с развитием элементной базы электроники, разработчики стараются в первую очередь реализовать именно в рамках системы КАМАК.
Магистраль крейта КАМАК по своей идеологии ориентирована на использование в крейте всего лишь одного источника управления — контроллера крейта. Использование дополнительных управляющих устройств в крейте невозможно по той причине, что только контроллер крейта через разъем управляющей 25-й станции имеет доступ ко всем линиям адреса станций N и линиям L-запросов функциональных модулей. Кроме того, при использовании дополнительных средств управления в крейте необходимо обеспечивать определенный принцип предоставления приоритета на использование магистрали крейта при одновременном требовании на работу с ней от нескольких источников управления.
Рабочими группами комитета ЕSONE были проанализированы возможности использования идеологии распределенного интеллекта в рамках системы КАМАК. Изыскания в первую очередь были направлены на то, чтобы разгрузить наиболее узкие в смысле потоков информации места в сложных многокрейтных измерительных системах. Результатом этой деятельности было опубликование в 1978 г. официального документа — стандарта на организацию много контроллерного крейта КАМАК, в котором кроме основного контроллера разрешено использование ряда дополнительных средств управления. Для того чтобы исключить перечисленные выше трудности, возникающие при организации такого рода систем в рамках одного крейта, было предложено использовать в крейте дополнительную магистраль. Предложенная идеология многоконтроллерного крейта в первую очередь ориентирована на применение в измерительных системах, выполненных на базе параллельной или последовательной ветви КАМАК.
Следующим шагом комитета ESONE, направленным на сохранение системы КАМАК в качестве основной модульной системы для автоматизации научных исследований, является предложение о расширенном использовании магистрали крейта, которое разработано с учетом большинства требований, предъявляемых к магистралям современных многопроцессорных систем. Предложение по существу сводится к совместному использованию на базе конструктивов КАМАК и магистрали крейта двух модульных систем — существующей системы КАМАК и новой модульной системы, получившей название СОМРЕХ (от английского Compatible Extended Use of the CAMAC Dataway). Система СОМРЕХ предполагает широкое использование при разработке функциональных модулей современной элементной базы, и в первую очередь микропроцессоров.
§ 4.2. МНОГОКОНТРОЛЛЕРНЫЙ КРЕЙТ
Требование увеличения скорости накопления данных в сложных экспериментальных установках привело к необходимости поиска возможностей децентрализации обработки информации и управления отдельными узлами установки в ходе измерений. Одним из таких решений является предложение комитета ESONE по организации многоконтроллерной системы в крейте КАМАК, которое определяет способ объединения нескольких источников управления в крейте. На рис. 4.1 показан общий вид многоконтроллерного крейта. Как обычно, в системе КАМАК на 24 и 25 станциях размещается контроллер крейта, который в данном случае называется основным контроллером (англ. обозначение СС — Crate Controller). На нормальных станциях наряду с функциональными модулями могут быть установлены другие, дополнительные контроллеры (англ. обозначение АС — Auxiliary Controllers).
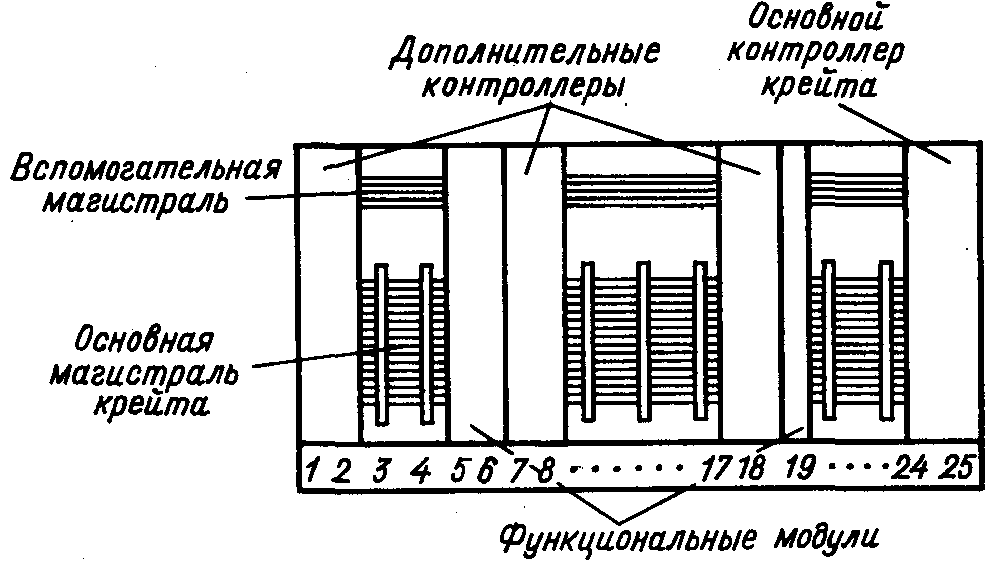
Рис. 4.1. Общий вид многоконтроллерного крейта
Использование многоконтроллерных крейтов предполагается в первую очередь в сложных измерительных системах, организованных по принципу параллельной или последовательной ветви, т. е. там, где наиболее остро стоит вопрос использования периферийных средств управления и обработки. Это не исключает, однако, использования многоконтроллерного крейта при создании автономных систем и обычных систем на линии с ЭВМ. Исходя из этого в качестве основного контроллера в крейте могут быть использованы любые контроллеры, имеющие специальный канал связи (аппаратные средства и разъем) для взаимодействия с дополнительными контроллерами. Так, при применении многоконтроллерного крейта в качестве основного контроллера в параллельной ветви рекомендовано использование соответствующей модификации контроллера типа А (см. § 3.4), которая получила название контроллера типа А2. В последовательной ветви соответственно используется контроллер типа L2. Следует отметить, что стандарт на организацию многоконтроллерного крейтера был принят позже соответствующих рекомендаций комитета ESONE на канал последовательной ветви с контроллером типа L2. По этой причине контроллер L2 не содержит специального разъема, как у контроллера А2, для технической организации канала связи с дополнительными контроллерами. При необходимости имеющийся на задней панели контроллера L2 дополнительный разъем для подключения LАМ-грейдера можно использовать для связи с дополнительными контроллерами, поскольку на него выведены все необходимые сигналы для организации такой связи.
В дополнительных контроллерах обычно имеются микропроцессорные устройства или микро-ЭВМ, которые существенно расширяют возможности управления работой аппаратуры в процессе измерения и позволяют вести предварительную обработку поступающих данных без участия центральной ЭВМ измерительного комплекса.
Для того чтобы взаимодействовать с другими дополнительными контроллерами и любыми функциональными модулями, установленными в крейте, дополнительные контроллеры должны иметь равноправную с основным контроллером возможность управлять обменом информацией по магистрали крейта. Дополнительные контроллеры через основной магистральный разъем нормальных станций имеют доступ ко всем линиям магистрали, за исключением линий адреса N и запросов L других станций. Доступ к последним возможен лишь через разъем управляющий станции крейта, т. е. фактически только через основной контроллер. С этой целью, а также для передачи сигналов очередности использования магистрали все контроллеры в крейте соединяются дополнительной магистралью. Дополнительная магистраль представляет собой обычный многожильный кабель с числом разъемов на нем, соответствующим количеству контроллеров, установленных в крейте. Дополнительная магистраль располагается на задних панелях контроллеров выше основных магистральных разъемов крейта.
На рис. 4.2 показана организация связей между контроллерами крейта с использованием дополнительной магистрали, а в табл. 4.1—основные сведения о сигналах, циркулирующих по этой магистрали.
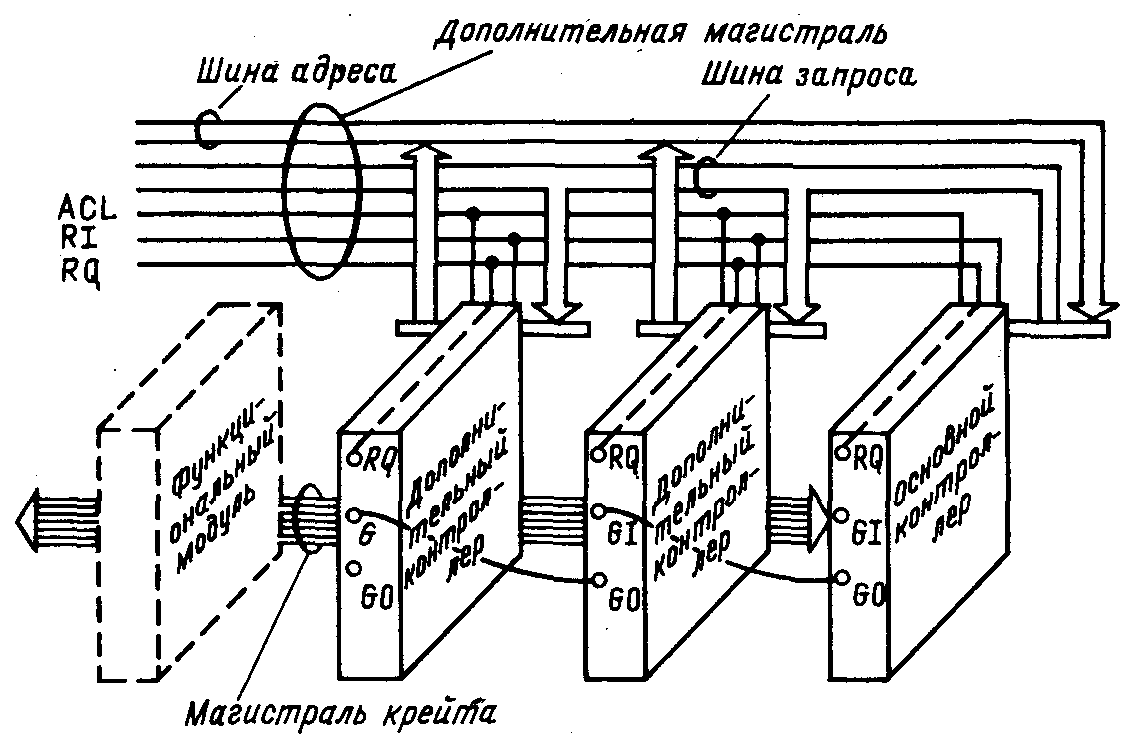
Рис. 4.2. Организация связей контроллеров в крейте
-
Английское название
Обозначение
Назначение
Request
Grant-In
Grant-Out
Request Inhibit
Auxiliary Controller Lockout
Encoded-N
Look-At-Me
RQ
GI
GO
RI
ACL
EN
AL
Запрос
Вход сигнала разрешения
Выход сигнала разрешения
Запрет выдачи запроса
Блокировка дополнительных контроллеров
Номер станции в крейте
Сигнал запроса
Таблица 4.1 Сигналы дополнительной магистрали
При выполнении дополнительным контроллером адресуемой команды NAF он генерирует двоичный код номера станции N, который по линиям ЕN дополнительной магистрали поступает в основной контроллер. Этот контроллер декодирует код адреса и устанавливает логическую 1 на соответствующей линии N через разъем управляющей станции. Все остальные сигналы команды А и F передаются дополнительным контроллером непосредственно на основную магистраль крейта через разъем той нормальной станции, на которой установлен контроллер.
Доступ дополнительных контроллеров к сигналам L-запросов в крейте осуществляется через основной контроллер. Сигналы запросов от любых устройств (контроллеров или функциональных модулей), установленных на нормальных станциях, поступают на разъем управляющей станции, откуда основным контроллером они ретранслируются по линиям АL дополнительной магистрали ко всем контроллерам в крейте.
В многоконтроллерном крейте вопросы приоритета использования основной магистрали могут разрешаться между контроллерами двумя способами или, как говорят, с помощью двух различных протоколов.
Протокол R/G (от английского Request/Grant-Запрос/ Разрешение).
При этом способе определения приоритета используются три основных сигнала:
- Сигнал Запрос RQ передается по сквозной линии связи дополнительной магистрали ко всем контроллерам. Кроме того, линия RQ этой магистрали проходит напрямую через контроллеры к специальному разъему RQ на передних панелях контроллеров.
- Сигнал Разрешение G передается последовательно с выходного разъема передней панели GО одного контроллера на входной разъем GI другого. Соединения для сигнала G выполняются кабельными связями между разъемами GO и GI всех контроллеров (рис. 4.2).
- Сигнал Запрет запросов R1 передается по сквозной линии связи дополнительной магистрали к каждому контроллеру.
Организация приоритетности контроллеров на использование основной магистрали крейта по протоколу R/G организуется следующим образом. На передней панели контроллера, которому задан заранее наивысший приоритет, разъемы RQ и GI соединяются кабельной связью. Разъем GО этого же контроллера соединяется кабелем с разъемом GI следующего по приоритетности контроллера. Такого рода соединения выполняются между всеми последующими контроллерами вплоть до контроллера, обладающего самым низким приоритетом в данном крейте. На рис. 4.2 показаны соединения разъемов GО и GI для частного случая, когда наивысшим приоритетом среди всех контроллеров крейта обладает основной контроллер.
Контроллер, который в произвольный момент времени запрашивает разрешения работы с основной магистралью крейта, генерирует поступление на линию связи RQ дополнительной магистрали сигнала Запрос RQ. Этот сигнал поступает во все контроллеры крейта, в том числе и в контроллер с наивысшим приоритетом, в котором он сразу же поступает на вход GI. В том случае, если этот контроллер в данный момент времени не запрашивает работы с магистралью, он вырабатывает на выходном разъеме GО сигнал, поступающий на вход GI следующего по этой цепочке соединений контроллера. Первый же контроллер, который также генерирует сигнал Запрос RQ не пропускает далее сигнал GI или, что то же самое, не вырабатывает сигнала на разъеме GО передней панели. Соединения от контроллера к контроллеру через разъемы GI —GО образуют цепь, по которой сигнал Запрос RQ будет распространяться каждый раз до контроллера с более высоким приоритетом, которому в этом случае и передается управление основной магистралью крейта. Контроллер, получивший право управления основной магистралью крейта, генерирует на дополнительную магистраль сигнал Запрет RI, сообщая всем остальным контроллерам, что он получил управление магистралью, а затем снимает свой сигнал Запрос RQ с дополнительной магистрали. В ответ на получение сигнала Запрет RI другие контроллеры также снимают с дополнительной магистрали свои сигналы Запрос RQ. После того как контроллер, получивший управление основной магистралью, заканчивает операции на этой магистрали, он снимает сигнал Запрет RI с дополнительной магистрали и управление основной магистралью крейта будет предоставлено следующему по приоритетности контроллеру.
В том случае, если несколько контроллеров одновременно запрашивают управление магистралью крейта, управление предоставляется тому контроллеру, который обладает наивысшим приоритетом, определяемым его позицией в цепочке разрешений GI — GI (см. рис. 4.2).
Протокол АСL14
При этом способе задания приоритета лишь одному из всех контроллеров в крейте, которым может быть как основной, так и дополнительный контроллер, отдается наивысший приоритет в любой момент времени для управления магистралью крейта. Только этот контроллер может генерировать сигнал АСL на соответствующую линию связи дополнительной магистрали. Контроллер, генерирующий сигнал АСL, обладает абсолютным приоритетом. При получении сигнала АСL контроллер, который в данный момент времени управляет магистралью, прерывает либо заканчивает свою операцию до начала цикла контроллера, выставившего сигнал АСL.
Этот протокол захвата управления магистралью введен для тех контроллеров, которые по условиям работы не могут ожидать предоставления управления магистралью в течение задержки, связанной с особенностью предоставления управления по протоколу R/G.
§ 4.3. СИСТЕМА СОМРЕХ
Интенсификация научных исследований и возрастание сложности физического эксперимента требуют нового подхода к аппаратурной и программной организации вычислительных комплексов.
Как уже отмечалось, наиболее популярной среди экспериментаторов, доступной и хорошо зарекомендовавшей себя при практическом использовании является система КАМАК. Комитетом ESONE проводится постоянная работа по развитию этой системы с учетом новых требований, предъявляемых современным измерительным системам в связи с широким использованием при их разработке микропроцессорных устройств и микросхем большой степени интеграции.
Для того чтобы по возможности максимально использовать преимущества, которые дает применение микропроцессоров в составе электронной аппаратуры, серьезное внимание уделяется оптимизации выбора магистрали связи между отдельными компонентами системы. Конструкция и логика использования магистрали крейта КАМАК были предложены в начале 70-х годов и, естественно, не рассчитаны на построение многопроцессорных систем в рамках одного крейта. С современной точки зрения стандартное использование магистрали крейта обладает рядом существенных недостатков, которые снижают эффективность использования микропроцессоров в составе функциональных модулей. Прежде всего, слишком малое (всего 16) значение возможных субадресов внутри модуля или, как говорят, малая величина адресного пространства в модуле, поскольку для передачи кодов субадресов на магистрали крейта выделены всего лишь четыре линии связи. Это обстоятельство не позволяет осуществлять прямую адресацию по магистрали отдельных ячеек памяти ОЗУ больших объемов, необходимость использования которых в многопроцессорных системах очевидна.
Недостаточная гибкость в идентификации источников запросов в крейте приводит к затратам довольно большого времени на их поиск и обслуживание.
Длительность цикла на магистрали в 1 мкс, принятая в системе КАМАК, не удовлетворяет использованию современных быстродействующих микросхем. Кроме того, синхронность цикла снижает скорость обмена по магистрали и затрудняет обмен между устройствами с различным быстродействием.
Стандарт СОМРЕХ, который принят комитетом ЕSONE, определяет новое использование существующей магистрали крейта с целью устранения большинства недостатков «классической» системы КАМАК, ограничивающих применение современной элементной базы при разработке функциональных модулей. Поскольку стандарт СОМРЕХ не изменяет конструктивов и магистрали крейта, он допускает совместное использование существующих модулей КАМАК и модулей, разрабатываемых в рамках нового стандарта. Естественно при этом, что в контроллер крейта должны быть заложены возможности управления магистралью как по обычному протоколу обмена, определенного логическим стандартом КАМАК, так и по протоколу стандарта СОМРЕХ. В табл. 4.2 показано использование линий магистрали крейта в соответствии со стандартом СОМРЕХ. Перед всеми обозначениями линий и сигналов, передаваемых по ним, в системе СОМРЕХ используется символ Е (от английского Extended).
В новом стандарте в отличие от системы КАМАК использована двунаправленная шина данных, для которой выделены линии связи ЕR1—ЕR24. Освободившиеся при этом линии EW1 — ЕW24 применяются как шина адреса. В системе СОМРЕХ возможны два вида адресации - географическая и логическая. При географической (позиционной) адресации, так же как и в системе КАМАК, адрес крейта. Модуль в этом случае адресуется по индивидуальным для каждой станции линиям N.
Линии ЕW1 — ЕW24 используются в этом случае для передачи двоичного кода адреса элементов внутри модуля, т. е. фактически как линии субадреса в системе КАМАК.
В случае использования логической адресации по старшим разрядам адресной шины ЕW20 — ЕW24 передается базовый адрес модуля, а по младшим разрядам — внутренний адрес элементов в модуле. При логической адресации адрес модуля не зависит от его местоположения в крейте. Значение базового адреса задается каждому модулю либо программно, либо с помощью переключателей и перемычек в самом модуле.
| Обозначение линий | Назначение линий | Источник сигнала |
| EW1-EW24 ES1 ES2 EQ EA1, EA2, EA4, EA8 ER1 – ER24 EX EZ EC | Передача адреса Значения адреса и операции установлены Команда принята Данные установлены Конец блока данных Передача данных Вектор прерывания установлен Установка в начальное состояние Сброс | Контроллер Контроллер Модуль Модуль, контроллер Контроллер Модуль, контроллер Модуль, контроллер Модуль со старшим запросом Контроллер Контроллер |
Таблица 4.2. Назначение линий связи магистрали крейта в системе COMPEX
Линии EA1, EA2, EA4 используются в различных режимах адресации для расширения адресного поля модуля и для вспомогательных целей при адресации.
По линии EA8 может передаваться сигнал конца блочной передачи данных при обмене массивом информации между модулем и контроллером крейта.
Назначение сигналов состояния X, Q и управляющих сигналов Z, C, I практически такое же как и в системе KAMAK.
В системе СОМРЕХ введено использование дополнительных операций (табл. 4.3) из числа зарезервированных ранее для развития системы КАМАК. Операция F(13) применяется как операция чтения, а F(29) — как операция записи только при географической адресации. Соответственно операции F(15) и F(31) используются как операции чтения и записи только при логической адресации модулей. В системе СОМРЕХ используется более гибкая и быстрая организация обработки L-запросов функциональных модулей крейта.
| Операция | Тип адресации | Использование |
| F(13)-чтение F(29)-запись F(15)-чтение F(31)-запись F (7) –передача вектора прерывания | Географическая » Логическая » » | EW1 – EWi-адрес, i<25 ER1 – ER24-данные и статус модуля EW1 – EW24-адрес ER1 – ER24-данные и статус модуля ER1 – ER24-вектор прерывания |
Таблица 4.3. Использование дополнительных операций в системе COMPEX
Система СОМРЕХ рассчитана на использование многих управляющих устройств в крейте. В этом смысле она представляет собой такой же многоконтроллерный крейт, который был рассмотрен предыдущем параграфе, но с более удобной организацией для использования микросхемной техники. Все вопросы приоритетности использования магистрали крейта разрешаются через дополнительную гибкую магистраль и по тому же принципу и протоколу обмена, т. е. так же, как и в многоконтроллерном крейте.
В заключение следует отметить, что система СОМРЕХ к середине 80-х годов не получила столь широкого признания, как система КАМАК. Это связано, в частности, с тем обстоятельством, что большинство экспериментальных задач в области физических исследований могут решаться с использованием системы КАМАК в разных ее конфигурациях, а столь активных разработок, как в первые годы развития системы КАМАК, в системе СОМРЕХ не проводится.
§ 4.4. СИСТЕМЫ FASTBUS
Новая электронная модульная система высокого быстродействия FASTBUS разработана главным образом для автоматизации измерений в физике высоких энергий. При разработке системы учтены последние достижения в области элементной базы приборостроения, а также опыт создания электронных модульных систем, ориентированных на использование многих источников управления.
В отличие от системы КАМАК, где для объединения таких компонентов, как модули и крейты, в единую систему используются различные структуры - магистраль крейта и магистраль ветви, в системе FASTBUS применяется один единственный элемент, называемый сегментом. Сегмент представляет собой магистраль для
обмена информацией между модулями и между управляющими модулями разных сегментов. Эта магистраль может содержать до 26 разъемов для подключения модулей. Конструкционно сегмент выполняется либо в виде магистрали специального крейта, либо в виде кабеля, с разъемами для соединений между крейтами. Например, для подключения модулей используется сегмент крейта, а для объединения крейтов применяется кабельный сегмент. Важно и то обстоятельство, что структура самого сегмента для различных уровней объединения одна и та же. Это уменьшает количество специальных модулей (типа интерфейсов, контроллеров), необходимых для объединения отдельных структур системы FASTBUS в единый комплекс и упрощает программирование системы.
Все шины магистрали-сегмента - двунаправленные, что позволяет передавать информацию между любыми модулями в сегменте в обоих направлениях. В целях достижения большего быстродействия уровни сигналов на магистрали соответствуют уровням микросхем с эмиттерно-связанной логикой. Благодаря этому время цикла на магистрали составляет менее 100 не, т. е. более чем на порядок меньше времени цикла на магистрали крейта КАМАК.
В системе FASTBUS имеется ряд специальных модулей, выполняющих роль интерфейсов связи между отдельными частями системы. Так называемый модуль связи предназначен для связи различных сегментов в соответствии с протоколом обмена, принятым в системе FASTBUS.
Интерфейс центрального процессора служит для подключения всей системы к центральной ЭВМ измерительного комплекса.
Буферный модуль связи применяется для согласования работы устройств с различным быстродействием и для работы на длинные линии связи.
Функциональные модули, предназначенные непосредственно для переработки информации, поступающей от экспериментальной установки, делятся на ведущие и ведомые. Ведущие модули могут инициировать обмен информацией с ведомыми модулями. Ведущими модулями могут быть, например, различные управляющие блоки - источники программного управления обменом с ведомыми модулями. Ведомые модули — это пассивные устройства, например такие, как преобразователи, формирователи, накопители информации и т.п.
В системе FASTBUS используется гибкий принцип связей как между ведомыми и ведущими модулями одного сегмента, так и между ведущими модулями, установленными в разных сегментах. Обмен всегда происходит по принципу запрос - ответ, при котором скорость обмена определяется медленнодействующим устройством. Обмен информацией между модулями, находящимися в различных сегментах, происходит через модули связи. В системе FASTBUS структура организации связей между любыми элементами системы не ограничена и может быть радиальной, древовидной или кольцевой в зависимости от того, какой путь приводит к оптимальным в смысле скорости обмена связям между элементами системы.
Для более гибкого программирования обмена информацией в системе предусмотрены три типа адресации - географическая, логическая и групповая. При географической адресации, как обычно, адрес модуля определяется его расположением в системе. Структура логической адресации аналогична логической адресации в системе СОМРЕХ. При этом младшие разряды 32-разрядного слова адресного кода используются для адресации отдельных функциональных элементов внутри модулей, т. е. фактически как субадреса в системе КАМАК, а старшие разряды — для адресации самих модулей. В том случае, когда по условиям работы необходимо обращение одновременно к группе модулей для выполнения в них однотипных действий, например сброса регистров модулей, используется групповая адресация. Логическая и групповая адресации допускают их различные модификации для более быстрого выполнения необходимых действий в модулях, расположенных в различных сегментах общей системы.
В системе FASTBUS тщательно проработан вопрос установления приоритета на работу с магистралью сегмента между различными модулями, а также предоставление приоритета модулям связи между отдельными сегментами на более высоком, т. е. системном, уровне.
Конструктивные элементы системы FASTBUS разработаны с учетом обеспечения условий работы быстродействующих микросхем с эмиттерно-связанной логикой. Предложены два типа крейтов — тип А и тип W. В крейте типа А используется принудительное воздушное охлаждение, и он предназначен для сравнительно маломощных систем. В крейтах типа W применяется водяное охлаждение, и они рассчитаны на использование в измерительных системах с большим тепловыделением.
Система FASTBUS обладает многими достоинствами перед другими модульными системами благодаря тщательной проработке элементов системы, гибкой организации магистральных связей и высокому быстродействию. Однако в том виде, в котором она реализована для обслуживания некоторых сложных экспериментов в физике высоких энергий, система FASTBUS вряд ли получит широкое распространение, поскольку для большинства применений она представляется во многом избыточной, неоправданно сложной и дорогой.
КОНТРОЛЬНЫЕ ВОПРОСЫ К ГЛАВЕ 4
1. В чем заключаются основные трудности широкого использования нескольких управляющих устройств в одном крейте КАМАК:
а) в ограниченном количестве свободных станций в крейте;
б) в отсутствии доступа ко всем линиям N и L с разъемов нормальных станций магистрали крейта; в трудностях установления приоритета на работу с магистралью для нескольких управляющих устройств;
в) в отсутствии прямого доступа всех управляющих устройств к шине данных и к шине управления?
2. Что входит в понятие многоконтроллерный крейт:
а) крейт, в котором в качестве контроллера используется устройство, содержащее несколько каналов связи для одновременной работы с различными ЭВМ;
б) крейт, содержащий несколько равноправных контроллеров для связи с различными ЭВМ;
в) крейт, в котором кроме основного контроллера на нормальных станциях располагаются несколько дополнительных контроллеров?
3. В чем отличие основного контроллера крейта от дополнительного:
а) основной контроллер содержит специальные электронные узлы для обеспечения выхода дополнительных контроллеров к линиям N и L магистрали и устанавливающие приоритетность использования магистрали крейта дополнительными контроллерами;
б) основной контроллер взаимодействует с функциональными модулями в крейте, дополнительные контроллеры обмениваются информацией лишь с основным контроллером;
в) дополнительные контроллеры в отличие от основного не предназначены для связи с вычислительными средствами измерительной системы?
4. Каково назначение дополнительной магистрали в крейте:
а) для связи с другими крейтами;
б) для обеспечения возможности выхода дополнительных контроллеров ко всем линиям N и L и передачи сигналов приоритетности использования основной магистрали крейта;
в) для передачи дополнительных сигналов, управляющих взаимодействием вспомогательных контроллеров с функциональными модулями с целью увеличения скорости передачи информации?
5. Каковы особенности использования протокола ACL для обмена информацией в многоконтроллерном крейте:
а) протокол ACL позволяет одному наиболее приоритетному контроллеру в любой момент времени «захватить» управление основной магистралью крейта;
б) позволяет ускорить обмен информацией между двумя заранее выделенными контроллерами в крейте;
в) контроллер, выставивший сигнал ACL, обладает наинизшим приоритетом на работу с магистралью крейта?
6. Что представляет собой система СОМРЕХ:
а) новая электронная модульная система, которую предполагается использовать взамен системы КАМАК;
б) новая система, ориентированная на узкую область применения;
в) новая система, ориентированная на широкое использование в модулях микропроцессорной техники; реализуется на базе крейта и магистрали КАМАК, допускает совместное использование модулей КАМАК и СОМРЕХ?
7.Каковы особенности использования магистрали крейта при обмене информацией по протоколу СОМРЕХ:
а) магистраль используется так же, как в системе КАМАК, за исключением линий W, которые используются для передачи кода адреса модуля;
б) Практически все линии магистрали крейта используются иначе, чем в системе КАМАК, в соответствии с протоколом обмена, принятым в системе СОМРЕХ;
в) магистраль используется иначе только при обмене массивами информации?
8. Какие возможности для адресации функциональных модулей предусмотрены в системе СОМРЕХ:
а) сохранен способ адресации, принятый в системе КАМАК;
б) используется только логическая адресация. Коды адресов модулей передаются по линиям EW1 — EW24;
в) имеется возможность использования как географической, т. е. принятой в системе КАМАК, так и логической адресации?
9. Каково назначение электронной модульной системы FASTBUS:
а) одна из новых модульных систем широкого применения, рассчитанная на использование микропроцессорной элементной базы;
б) узкоспециализированная система для автоматизации технологических процессов и некоторых жестких алгоритмов работы научных экспериментальных установок;
в) система высокого быстродействия, ориентированная на использование многих источников управления, которая предназначена для использования в первую очередь в отдельных сложных экспериментах физики высоких энергий?
10. Что понимается под термином сегмент в системе FASTBUS:
а) специальный управляющий модуль, обеспечивающий протокол обмена информацией в системе FASTBUS;
б) представляет собой единую магистраль, реализуемую в различных конструктивных вариантах. Используется как для обмена информацией между модулями в крейте, так и между отдельными крейтами;
в) стандартная часть всех модулей, предназначенная для обеспечения обмена информацией между ними?