
Сергей Владимирович Пашенцев, канд физ мат наук, профессор кафедры судовождения Мурманского государственного технического университета методические указания
| Вид материала | Методические указания |
- Кузнецов Юрий Валентинович, канд филос наук., доцент кафедры социальной работы Мурманского, 499.52kb.
- Баева Людмила Сандуовна, канд техн наук, профессор, кафедры технологии металлов и судоремонта, 570.28kb.
- Рапницкая Наталья Михайловна, старший преподаватель кафедры финансов, бухгалтерского, 436.36kb.
- Марченко Ирина Сергеевна, старший преподаватель кафедры менеджмента, маркетинга, коммерции, 397.82kb.
- Антропологи я, 357.05kb.
- Александр Эдуардович Кириченко, доцент кафедры Информационных систем Мурманского государственного, 187.69kb.
- В. А. Каймин Информатика Учебник, 2601.15kb.
- В. А. Каймин Информатика Учебник, 2602.83kb.
- В. А. Каймин Информатика Учебник, 2601.27kb.
- Председатель чл кор. Ран, д-р физ мат наук, проф. В. Д. Мазуров Секретарь аспирант, 410.25kb.
КОМИТЕТ по РЫБОЛОВСТВУ РОССИЙСКОЙ ФЕДЕРАЦИИ
МУРМАНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
СУДОВОДИТЕЛЬСКИЙ ФАКУЛЬТЕТ
КАФЕДРА СУДОВОЖДЕНИЯ
Методические указания к выполнению курсовой работы
по дисциплине
“Автоматизация судовождения”
для специальности 180402 “Судовождение ”
(очная и все заочные формы обучения)
“ч.1.Расчет характеристик случайных процессов.
ч.2.Определение параметров движения лоцируемых целей”
МУРМАНСК
2008
УДК 656.61.052.1
ББК 39.471 П-22
Разработчик – Сергей Владимирович Пашенцев, канд. физ.-мат.
наук, профессор кафедры судовождения Мурманского государственного технического университета.
Методические указания рассмотрены и одобрены кафедрой судовождения для издания февраля 2008 года, протокол № 3.
СОДЕРЖАНИЕ
Введение
- Курсовая работа в учебном плане дисциплины
- Содержание курсовой работы
- Оформление курсовой работы
- Указания к выполнению части 1 курсовой работы
4.1 Исходные данные части 1 курсовой работы,: процессы X и Y.
4.2. Построение средних значений процессов и их дисперсий (СКО).
4.3. Построение автокорреляционных функций процессов.
4.4. Построение межпроцессной корреляционной функции.
4.5. Построение спектральных плотностей процессов.
4.6. Построение спектральной плотности процесса на выходе заданного линейного блока.
- Указания к выполнению части 2 курсовой работы.
5.1 Исходные данные части 2 курсовой работы: данные локации 5-ти подвижных целей.
5.2. Определение курса и скорости встречного судна по двум наблюдениям.
5.3. Определение курса и скорости встречного судна по всем наблюдениям.
5.4. Определение параметров кратчайшего сближения.
5.5. Выявление опасных целей.
5.6. Определение необходимого для расхождения маневра.
6. Заключение
7. Список литературы
ВВЕДЕНИЕ
Методические указания предназначены для курсантов судоводительского факультета, выполняющих курсовую работу по дисциплине “Автоматизация судовождения” (АС) в соответствии с учебным планом специальности 180402 “Судовождение”. Целью настоящих указаний является определение основных требований, которые предъявляются к структуре, содержанию и оформлению курсовой работы. Перед выполнением курсовой работы курсант обязан ознакомиться с существом этих требований, содержащих все вопросы, ответы на которые он должен дать при защите курсовой работы.
Курсовая работа выполняет функции завершающего и подводящего итоги этапа обучения дисциплине и выполняется самостоятельно под руководством преподавателей, ведущих на кафедре дисциплину “Автоматизация судовождения ”.
Методическая задача курсовой работы и всего курса АС в целом состоит в привитии понимания, как работает аппаратура автоматизации обработки информации и какие сложные задачи она решает без участия оператора.
1. КУРСОВАЯ РАБОТА В УЧЕБНОМ ПЛАНЕ ДИСЦИПЛИНЫ
- Курсовая работа является заключительным этапом в изучении дисциплины “Автоматизация судовождения”, ее выполнение служит подтверждением практического освоения теоретического материала дисциплины и умения приложить эти знания к жизненно важной задаче безопасного судовождения.
- Допуск к зачету по дисциплине разрешается только при условии успешной защиты настоящей курсовой работы.
- СОДЕРЖАНИЕ КУРСОВОЙ РАБОТЫ
2.1. Формулировка задания для курсовой работы
Задание для курсовой работы выдается индивидуально для каждого курсанта. Оно генерируется специальной программой из пакета «Рабочее место преподавателя АС» и гарантирует тем самым оригинальность данных каждой работы.
Сама работа состоит из двух частей, задания по которым генерируются отдельно.
В части 1 данные состоят из ста наблюдений двух случайных процессов, снятых через 1 сек. Следует произвести обработку этих результатов и построить ряд характеристик этих процессов и процессов, связанных с ними.
В части 2 данные состоят из результатов ряда наблюдений радиолокационных пеленгов и дистанций для пяти движущихся целей. Следует определить параметры движения этих целей, выделить из них самые опасные в отношении расхождения, и указать необходимые маневры для предупреждения аварийной ситуации.
Исходные данные, выдаваемые для выполнения курсовой работы, приведены в Приложении №1.
2.2. Состав курсовой работы
Курсовая работа состоит из текста, отражающего производимые вычисления и пояснения к ним и иллюстративного графического материала в виде графиков всех вычисленных функций и характеристик.
- Текстовая часть курсовой работы
Текстовая часть работы включает в себя:
- титульный лист, оформленный согласно Приложению №2,
- оглавление с указанием номеров разделов,
- формулировку заданий на части 1 и 2 курсовой работы, сгенерированных специальной программой,
- расчет необходимых характеристик, выполненных в любом пакете, например, в доступном для всех пакете Exel.
Каждый этап расчета должен предваряться соответствующими общими формулами, и лишь затем по ним производится сам расчет с указанием подставленных данных.
- Графическая часть курсовой работы.
Графическая часть работы включает в себя:
- построение ряда графиков для характеристик случайных процессов (ч.1),
- построение планшета с нанесением на него целей (ч.2).
2.5.Выполнение курсовой работы базируется на задании, которое формирует индивидуально для каждого курсанта программный комплекс “Рабочее места преподавателя АС”.
3. ОФОРМЛЕНИЕ КУРСОВОЙ РАБОТЫ
3.1.Курсовая работа оформляется в виде брошюры включающей титульный лист, текст на форматных листах, графики характеристик процессов на бумаге стандартного формата А4, радиолокационного планшета с целями в формате А4.
3.2.Каждый раздел работы начинается с нового листа, нумерация листов проекта должна быть сквозной. Шрифт для основного текста Times New Roman Cyr, размер 14 пунктов.
3.3.Текстовая часть проекта выполняется по ГОСТ 2.105-95 "'Общие требования к текстовым документам" и может быть выполнена от руки, на пишущей машинке или распечатана на принтере.
3.4.Графики и иные иллюстрации (см.п.2.4) размещаются на отдельных листах, обозначаются как рисунки (Рис.), имеют подрисуночное наименование, сквозную нумерацию в пределах проекта и следуют за текстом, в котором впервые дается ссылка на данную иллюстрацию.
3.5.Результаты расчетов сводятся в таблицы, размещаемые под текстом, в котором впервые дается на них ссылка, имеют название перед самой таблицей, отражающее ее содержание, и сквозную нумерацию в пределах курсовой работы.
3.6.Ссылки на использованные литературные источники и нормативную документацию должны выполняются в соответствии с ГОСТ 7.32-91.
3.7. Оглавление курсовой работы располагается после титульного листа, именуется как "Содержание" и состоит из номеров и названий разделов с указанием номеров страниц.
3.8.Список использованной литературы оформляется в соответствии с ГОСТ 7.32-91 и приводится на последней странице работы.
4. Указания к выполнению части 1 курсовой работы
«Расчет характеристик случайных процессов»
Выполнение этой части курсовой работы предусматривает владение курсантом математическим аппаратом обработки случайных процессов и умение применять этот аппарат на практике. Все расчеты подобного рода описаны в лекциях по курсу АС и не содержат ничего принципиально нового.
4.1 Исходные данные для выполнения курсовой работы
Индивидуальные исходные данные задачи ч.1 заданы в электронной форме, и состоят из ряда значений амплитуды процессов X и Y, полученных в наблюдениях через 1 сек. Всего задано 1024 значений. Сами задания генерируются специальной программой индивидуально для каждого курсанта. В работе эти данные можно занести в таблицу и показать в виде Приложения №1.
4.2. Обработка полученных данных.
Задание, ч.1:
Обработать процессы и найти их средние значения и СКО.
Построить автокорреляционные функции этих процессов.
По автокорреляциям построить спектральные плотности процессов.
Построить межпроцессную корреляцию и соответствующую спектральную плотность.
Определить спектральную плотность процесса Z на выходе из системного блока, на вход которого действует процесс Х. Сам блок задан передаточной функции вида W(p) = (T1p+1)/(T2p + 1), где постоянные Т1 и Т2 заданы указанным преподавателем способом (рис.1). Например, они могут быть связаны с номером Вашей группы и номером в списке группы. Каждый учебный год эта связь меняется.
Рис.1. Прохождение сигнала Х через системный блок
Далее даны формулы для вычисления указанных характеристик случайных процессов. Все они вводятся по определению, т.е. не требуют доказательств.
- Математические ожидания процессов
 , для процесса Y аналогично.
, для процесса Y аналогично.- Дисперсии и СКО процессов
 и СКО
и СКО  , для процесса Y аналогично.
, для процесса Y аналогично.- Автокорреляционные функции процессов
 k = 1,…, N-1, для процесса Y аналогично.
k = 1,…, N-1, для процесса Y аналогично.4) Межпроцессная корреляционная функция
 k = 1,…, N-1.
k = 1,…, N-1.5) Спектральная плотность процессов
 , где k = 1, 2,…, N-1.
, где k = 1, 2,…, N-1.Но, k = (2/Tk) = 2/(k*t), i = i*t, и тогда

Аналогично для процесса Y.
6) Спектральная межпроцессная плотность

7) Спектральная плотность процесса Z, который будет иметь место на выходе блока с передаточной функцией
W(p) = (T1p + 1)/(T2p + 1), если на вход блока подан сигнал Х, вычисляется с помощью соотношения
SZ() = |W(j)|2 * SX()
Вспомните, как находится модуль передаточной функции от комплексного аргумента j (перевод комплексных выражений в числитель и выделение действительной и мнимой частей).
4.3. Построение графиков
После нахождения всех указанных характеристик следует построить их графики. Вычисления и построение графиков проще всего провести в пакете Exel. Разумеется, можно использовать и любой другой математический пакет, которым Вы владеете. Типичный график показан на рис.1 (выполнен в Exel).
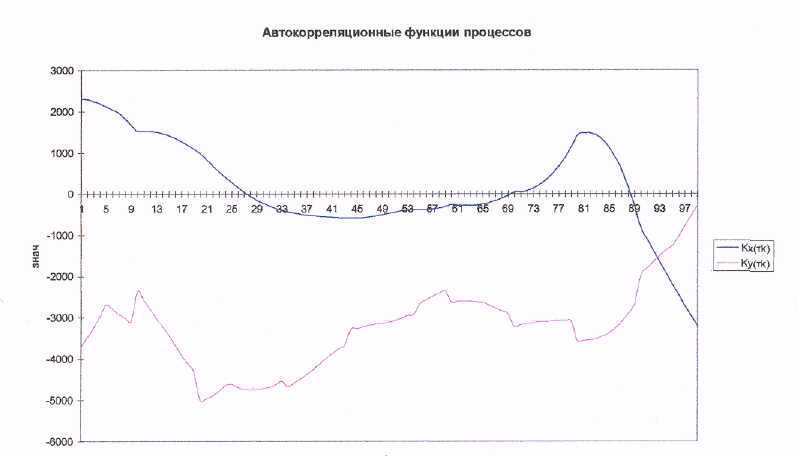
Рис. 1. Автокорреляционные функции процессов
4.4. Выводы
Сделать качественные выводы о характере заданных процессов (частотный состав, стационарность, эргодичность).
5. Указания к выполнению части 2 курсовой работы
«Определение параметров движения лоцируемых целей»
5.1 Исходные данные для выполнения ч.2
Задаются результаты наблюдения 10-и пеленгов и дистанций с помощью РЛС для 5 судов, двигающихся с постоянными скоростями и курсами, а также скорость и курс собственного судна.
Задание, ч.2:
Найти скорость хода и курс каждого судна, а также вычислить дистанции кратчайшего сближения и время до кратчайшего сближения.
Оценить степени опасности каждого из судов и выстроить их в иерархическом порядке по убыванию опасности.
Изобразить перемещения судов на планшете в абсолютной или относительной системе координат.
5.2. Аналитическое определение курса и скорости встречного судна по двум наблюдениям.
Рассмотрим схему относительного движения двух судов. Это значит, что движение нашего судна показано вверх (но это не Норд !), т.е. вся картинка повернута против часовой стрелки на величину курса нашего судна К0 (рис.2). Тем самым, все угловые величины уменьшены на эту же величину и пеленги Р превращаются в курсовые углы Q = P – K0. При этом можно ввести для упрощения угол K* = [(K-K0) -180], см. рис.2.
Рассматриваем проекции отрезка В1В2 на оси
на ось X (B1xB2x)
D1*sin(Q1) - D2*sin(Q2) = (Vt)*sin[(K-K0) -180] (2.1)
на ось Y(B1yB2y)
D1*cos(Q1) - D2*cos(Q2) - V0t = (Vt)*cos[(K-K0) -180] (2.2)
1) Возводим равенства 1и 2 в квадраты и складываем:
(Vt)2 = [D1*sin(Q1) – D2*sin(Q2)]2 + [D1*cos(Q1) – D2*cos(Q2) - V0t]2
Это равенство дает возможность определить скорость встречного судна:
(V)2 = {[D1*sin(Q1) – D2*sin(Q2)]2 + [D1*cos(Q1) – D2*cos(Q2) - V0t]2} / t2
2) Делим первое уравнение на второе:
tg[(K-K0) -180] = tg(K – K0) =
[D1*sin(Q1) – D2*sin(Q2)] / [D1*cos(Q1) – D2*cos(Q2) - V0t]
Это равенство определяет курс встречного судна.
Итак, для определения скорости и курса встречного судна достаточно двух измерений пеленгов и дистанций с помощью РЛС. Чем дальше отстоят во времени эти измерения, тем точнее результат определения V и K.
Задание: выберете несколько пар базовых точек для определения V и K и сравните результаты. Результаты занесите в сравнительную таблицу.
Табл.1
| № судна | Vпо двум соседним точкам | Vпо двум крайним точкам | Kпо двум соседним точкам | Kпо двум крайним точкам |
| 1 | | | | |
| 2 | | | | |
| 3 | | | | |
| 4 | | | | |
| 5 | | | | |
В ней заносятся скорости и курсы, определенные по двум соседним точкам (любым) и по двум крайним точкам наблюдений.
5.3. Аналитическое определение курса и скорости встречного судна по всем наблюдениям.
САРП определяет скорость и курс сразу по всему набору измерений, применяя метод наименьших квадратов (МНК). Покажем, как можно получить такие формулы.
Пусть встречное судно движется по прямой линии с неизвестными параметрами a и b. Ее уравнение y = ax + b. Координаты точек на этой прямой находим с помощью РЛС, измеряя пеленги и дистанции через равные промежутки времени. По пеленгу и дистанции вычисляются прямоугольные координаты точек:
xk = Dksin(Qk)
yk = Dkcos(Qk) + V0*t*k k = 1, …, N,
где n - общее число измерений.
Суммарное отклонение косвенно измеренных точек до прямой движения судна составляет:
S = (yk – a*xk – b)2
Известным методом наименьших квадратов минимизируем эту сумму, дифференцируя ее по неизвестным параметрам прямой a и b:
S/a = -2(yk – a*xk – b)xk = 0
S/b = -2 (yk – a*xk – b) = 0 (2.3)
Получили линейную систему двух уравнений с неизвестными параметрами прямой линии. Решая эту систему методом Крамера, находим:
a = [N(xk*yk) – (xk)*(yk)] / [N(xk)2 – (xk)2]
b = [N(xk)2*(yk) – (xk)*(xk*yk)] / [N(xk)2 – (xk)2]
Определив параметр прямой a, можно найти курс встречного судна K из простого соотношения: a = tg [90 - (K-K0)].
Найденные таким образом значения скорости и курса добавьте двумя столбцами в табл.2 под названиями Vпо всем точкам и Kпо всем точкам. Сравните качественно все найденные значения скоростей и курсов.
5.4. Определение параметров кратчайшего сближения.
Найдем кратчайшее расстояние между двумя судами и время до их кратчайшего сближения. Для этого запишем уравнение прямой линии движения встречного судна:
X1(t) = D1*sinQ1 – Vt*sin(K*)
Y1(t) = D1*cosQ1 – Vt*cos(K*)
Уравнение линии пути собственного судна очень простое (т.к. оно движется вдоль оси Y):
X0(t) = 0
Y0(t) = V0*t
Тогда квадрат расстояния между двумя судами в зависимости от времени t записывается так:
[D01(t)]2 = [X1(t) - X0(t)]2 + [Y1(t) - Y0(t)]2 =
= [D1*sinQ1 – Vt*sin(K*)]2 + [D1*cosQ1 – Vt*cos(K*) - V0*t]2
Находим минимум этого расстояния, дифференцируя его квадрат по t и приравнивая производную к нулю:
d[D01(t)]2 /dt = -2{ [D1*sinQ1 – Vt*sin(K*)] Vsin(K*) +
+ [D1*cosQ1 – Vt*cos(K*) - V0*t ](Vcos(K*) + V0)} = 0
Рис. 2. Схема относительного движения двух судов.
Это линейное относительно времени уравнение легко решается и дает время до кратчайшего сближения в отсчете от момента первого измерения пеленга и дистанции:
tкр = {[D1*sinQ1]V*sin(K*) + [D1*cosQ1](Vcos(K*) + V0)} /
{[V*sin(K*)]2 + [V*cos(K*) + V0]2}
После некоторых преобразований можно получить более удобное выражение:
tкр = D1{V*cos(Q1 - K*) + V0*cosQ1)} / {V2 + V02 + 2V* V0*cosK*} (2.4)
После нахождения этого момента времени, надо подставить его в формулу для дистанции и получить дистанцию кратчайшего сближения. Это удобнее сделать численно, хотя можно вывести соответствующую формулу.
Промежуточная формула выглядит так:
Dкр2 = D12 – 2D1[V0cosQ1 + Vcos(Q1 – K*)]*tкр + (V02 + V2 + 2V0VcosK*)tкр2
Самостоятельно: Выведите окончательную формулу для кратчайшего сближения (их может быть несколько - разных).
Скорость судна с учетом всех измеренных точек находим так. Вычисляем расстояние между первой и последней точками на прямой, которые соответствуют двум крайним наблюдениям:
S2 = (x1 – xN)2 + [(а*x1 + b) – (а*xN + b)]2 = (x1 – xN)2 * (1 + a2)
Это расстояние пройдено за время T = t*N. Значит, скорость судна равна
V = S/t*N. В ее определении участвуют все наблюдаемые точки, т.к. с их помощью были найдены параметры прямой а и b.
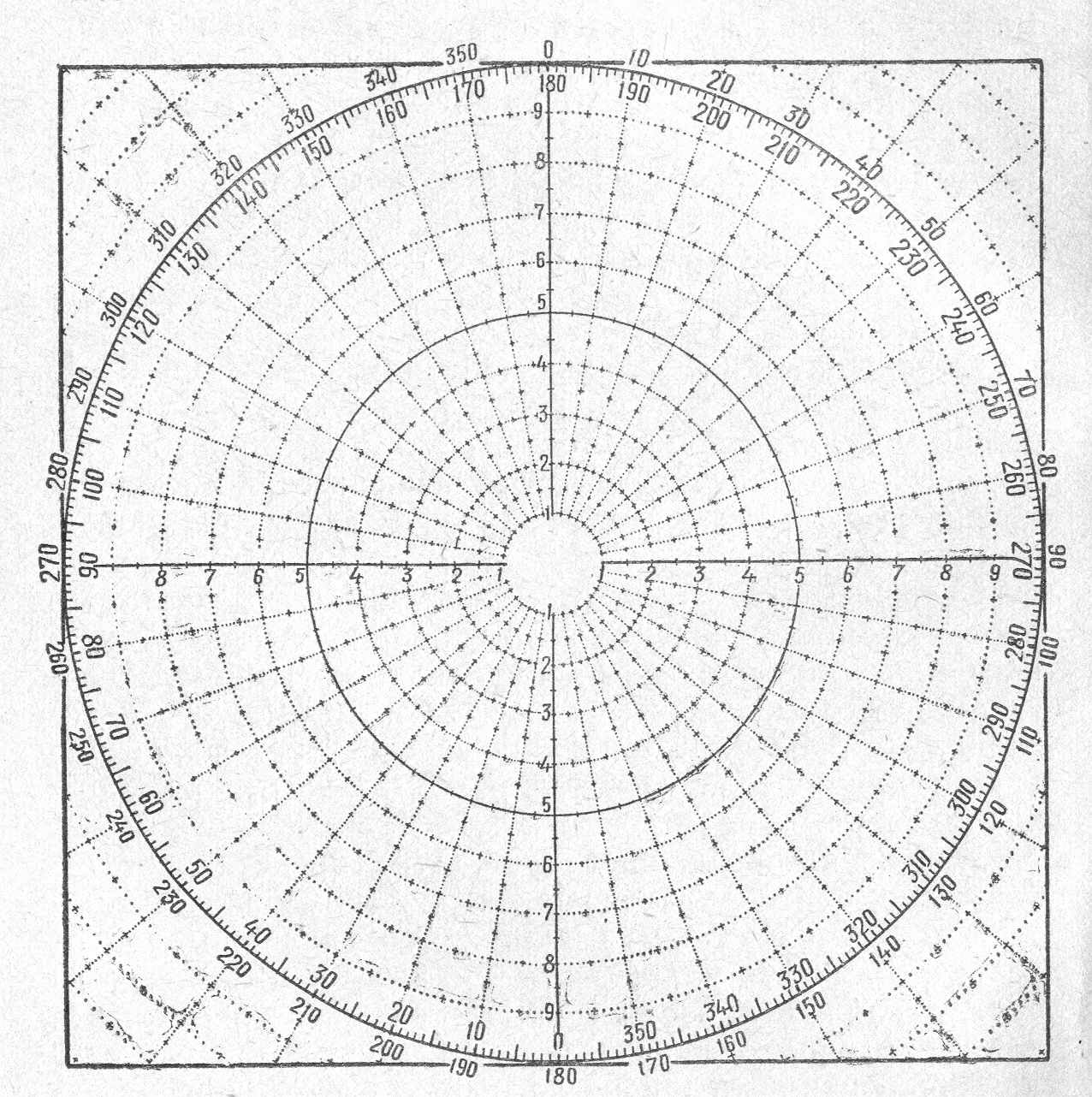
5.5. Графическое определение элементов движущихся целей (ЭДЦ) по пеленгам и дистанциям на маневренном планшете
Сделать это можно следующим образом. Свое судно принять в центре планшета условно неподвижным (точка М), точка а – положение цели в начальный момент наблюдений. Проложить вектор своей скорости Vм из точки М (рис. 3).. По результатам измерения пеленгов и дистанций определить скорость и курс цели. Проложить вектор скорости V цели также из точки М


Vм
Vr
V

ЛОД
а
б
М
Рис. 3. Определение ЭДЦ на маневренном планшете.
Соединить концы проложенных векторов скоростей и получить вектор скорости относительного перемещения судов V. Из точки а начального положения цели проложить линию относительного движения – ЛОД. Опустить перпендикуляр на нее из центра планшета М с основанием в точке б. Длина этого перпендикуляра Мб равна дистанции кратчайшего сближения.
Время до момента кратчайшего сближения находим так. Измерим расстояние между точками а и б. Разделим полученное значение на относительную скорость цели Vr. В результате получим tкр. Можно оперировать расстояниями в кабельтовых, временем в минутах, или расстояниями в милях и временем в часах.


Vм
Vr
V

ЛОД
в
М

а
Vм
б
г
Рис. 4. Определение ЭДЦ на маневренном планшете по двум отметкам цели а и в.
Можно определить ЭДЦ с помощью другого графического построения, использую положение на экране (планшете) двух отметок цели. В качестве таковых для большей точности результатов следует брать “крайние” измерения, т.е. в первой (а) и последней (в) точках выбранного промежутка времени (рис. 4).
Везде, где на рис. 4 показаны векторы скоростей цели V, собственного судна Vм и относительной скорости их перемещения V, можно оперировать соответствующими расстояниями, пройденными за некоторое время t: V*t, Vм*t, V*t.
Произведите все эти построения на двух маневренных планшетах, определите параметры движения целей и сравните результаты с аналитическим расчетом.
Контрольный пример.
Измерены дистанция и пеленг цели и получены результаты:
T1 = 1026 D1 = 7.5 м П1 = 66.5
T2 = 1029 D2 = 6.0 м П2 = 61.0
Вычислите с помощью формул и графических построений ЭДЦ и сравните с правильными результатами:
Vц = 28 уз Kц =288.2 Dкр = 2.64 м tкр = 9 м 54 с
5.6. Выбор прядка целей для сопровождения
Произведя расчеты одним из способов, и определив для выбранных целей кратчайшее расстояние и время до кратчайшего сближения, ставим цели на сопровождение в порядке их опасности с точки зрения обучающегося. Именно последовательность выбора целей оценивается тренажерной системой и от нее во многом зависит оценка результатов тренажа.
Опасной считается цель, для которой Dкр меньше некоторого заданного расстояния Dз безопасного расхождения для данных условий плавания.
Критерием безопасности служит величина дистанций расхождения D3. Практикой мореплавания выработаны следующие безопасные дистанции:
- для открытого моря D3 = 20 - 30 каб;
- для стесненных условий плавания D3 = 7 - 15 каб;
- на фарватерах не менее полуширины фарватера, двигаться вблизи его правой кромки.
Дистанцию расхождения 20 каб целесообразно принимать тогда, когда упрежденная дистанция около 50 каб. На 30 каб можно рассчитывать маневр расхождения в тех случаях, когда обеспечивается упрежденная дистанция более 70 каб. С тем чтобы иметь больше времени для оценки ситуации и расчетов можно уменьшить ход судно или остановиться.
Среди целей с примерно одинаковыми дистанциями кратчайшего сближения также существует своя иерархия опасных целей. Более опасны в данный момент те из целей, для которых время до кратчайшего сближения меньше. Ими следует заниматься в первую очередь и решать задачу выбора и расчета маневра для безопасного расхождения.
После того как цели для сопровождения оператором выбраны, система проводит те же вычисления, выдает на индикацию по каждой выбранной цели ее курс, скорость и параметры кратчайшего сближения. При этом оператор может сравнить с ними результаты своих предварительных расчетов. Система производит иерархическую расстановку целей и сравнивает ее с иерархией, определенной и введенной оператором. Сравнение результатов системой дает оценку этапа выбора целей, и эта оценка записывается в протокол тренажа по разделу маневрирования.
Произведя вычисления скорости и курса движущихся целей по всем точкам и параметров кратчайшего сближения, их следует занести в сводную таблицу вида табл.2. Однако, сортировать цели следует по степени опасности. Более опасной является цель, кратчайшее расстояние с которой меньше, время до кратчайшего сближения также меньше. Именно по этому принципу следует расположить цели-суда в табл.2. В этом порядке ими следует заниматься при решении проблемы маневра расхождения, если он потребуется.
Готовьтесь ответить на вопрос: что означает отрицательное значение кратчайшего расстояния, времени до кратчайшего сближения?
Табл.2
| № судна | Vпо всем точкам | Кпо всем точкам | Dкр | tкр |
| 1 | | | | |
| 2 | | | | |
| 3 | | | | |
| 4 | | | | |
| 5 | | | | |
5.7. Маневрирование в целях безопасного расхождения
Если дистанция кратчайшего сближения оказывается меньше дистанции безопасного расхождения в данных условиях, то следует предпринять маневр для расхождения, предварительно рассчитав его.
Маневр расхождения выполняют изменением курса, изменением скорости или одновременным изменением курса и скорости. Конечным результатом маневра должно быть изменение направления линии относительного движения (ЛОД) цели. Это изменение должно быть значительным настолько, чтобы оно могло быть обнаружено встречным судном. Поэтому согласно Правилу 8 МППСС «следует избегать ряда последовательных небольших изменений курса и/или скорости». Однако даже значительные, но безрасчетные изменения курса и скорости не всегда уменьшают опасность столкновения. Например, на рис. 5, а показано, что изменение своего вектора скорости от значения Vм0 (Ма0) до Vм1 (Ма1} не изменило опасный относительный курс сближения, а лишь уменьшило относительную скорость сближения (при векторе скорости цели VK = Mb). На рис. 5, б видно, что сравнительно небольшое изменение только курса изменило направление ЛОД.
При наличии достаточного водного пространства изменение только курса предпочтительнее. Однако всякое действие должно быть сделано заблаговременно (Правило 16 МППСС). Заблаговременность маневра корабля определяется упрежденной дистанцией Dy, с которой начинается маневр. Под стесненными условиями понимают акватории с наличием навигационных опасностей или районы, в которых находится более четырех целей в радиусе 5 миль от корабля.
6. Список литературы
Орлов В. А. Автоматизация промыслового судовождения. - М.: Агропромиздат. 1989. -266 с.
- Долматов Б.П., Орлов В.А., Шишло Ю.В. Автоматизация навигационных и промысловых расчетов, Мурманск. книжн. изд., 1977. – 175 с.
- Кондрашихин В.Т. Теория ошибок, Л.: Транспорт, 1969.
- Конспекты лекций по дисциплине «Автоматизация судовождения»
Приложение №1
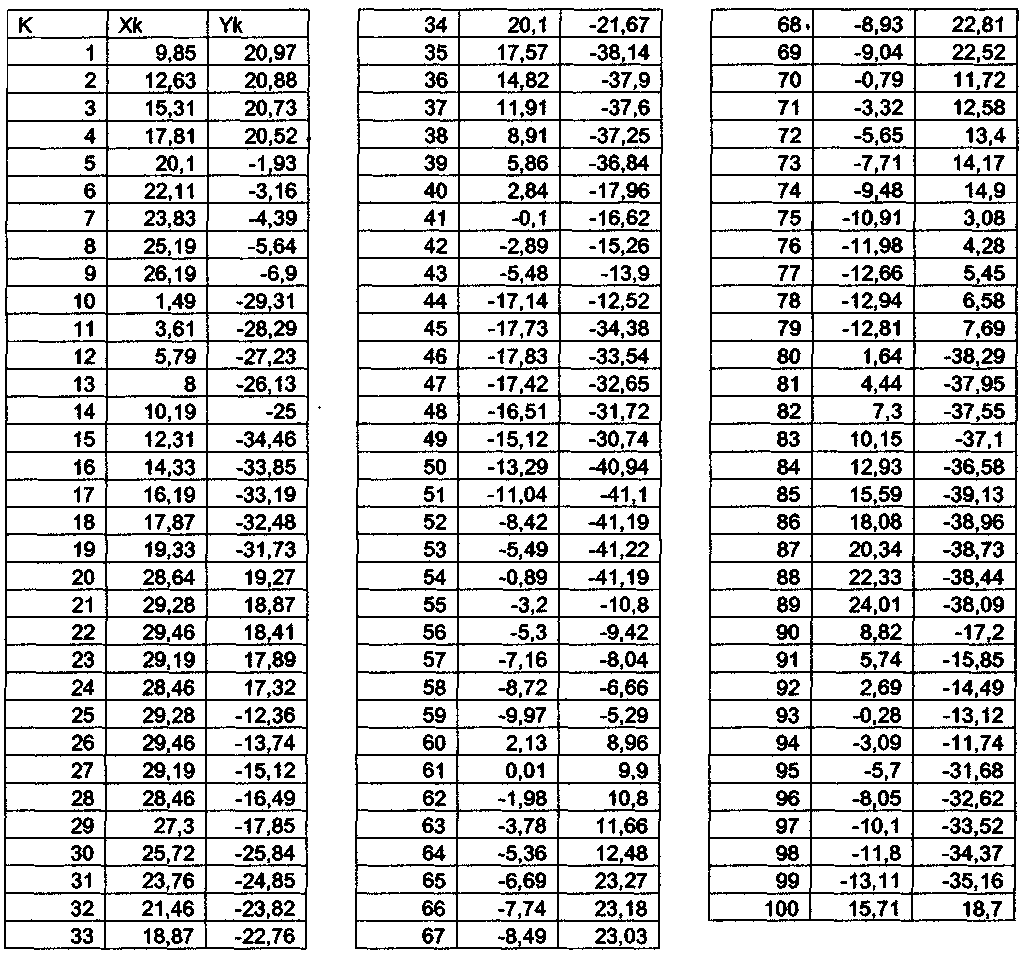
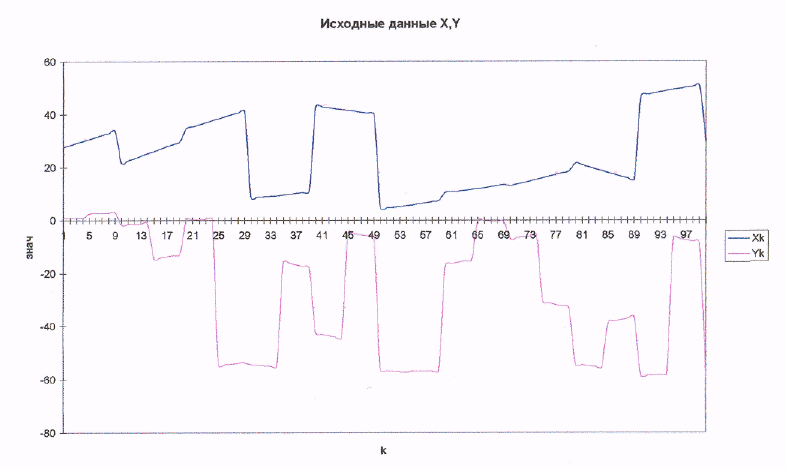
Исходные данные части 1 курсовой работы.
1024 значения результатов наблюдений двух процессов X и Y через 1 сек.
Ниже они приведены в табличной и графической формах (его вы строите сами). Для примера здесь показаны не все значения, а только 100.
ПРИЛОЖЕНИЕ №2
Исходные данные части 2 курсовой работы:
1) Cкорость и курс собственного судна: узл, град
09,98 071,5
2) Наблюдаемые цели-суда: время, дистанция, пеленг - сек, м.мили, град
Судно 1
5 001,540 087,82
10 001,498 087,82
15 001,456 087,82
20 001,414 087,82
25 001,372 087,82
30 001,330 087,82
35 001,288 087,82
40 001,246 087,82
45 001,204 087,82
50 001,162 087,82
Судно 2
5 001,934 084,22
10 001,911 084,29
15 001,888 084,36
20 001,864 084,43
25 001,841 084,51
30 001,818 084,58
35 001,795 084,66
40 001,771 084,74
45 001,748 084,82
50 001,725 084,91
Судно 3
5 001,687 038,66
10 001,641 038,66
15 001,595 038,66
20 001,549 038,66
25 001,503 038,66
30 001,457 038,66
35 001,411 038,66
40 001,365 038,66
45 001,319 038,66
50 001,272 038,66
Судно 4 *
5 002,200 042,53
10 002,140 042,53
15 002,080 042,53
20 002,020 042,53
25 001,960 042,53
30 001,900 042,53
35 001,839 042,53
40 001,779 042,53
45 001,719 042,53
50 001,659 042,53
Судно 5
5 002,083 036,48
10 002,054 036,34
15 002,026 036,20
20 001,998 036,05
25 001,969 035,90
30 001,941 035,75
35 001,913 035,59
40 001,885 035,42
45 001,856 035,25
50 001,828 035,08