
Вимірювання неелектричних величин 19 Вимірювання механічних величин
| Вид материала | Документы |
- Програма для загальноосвітніх навчальних закладів Фізика, 220.44kb.
- Програма для загальноосвітніх навчальних закладів Фізика, 220.77kb.
- Програма для загальноосвітніх навчальних закладів Фізика, 299.35kb.
- Державні будівельні норми україни система забезпечення точності геометричних параметрів, 766.46kb.
- Формат опису модуля, 17.97kb.
- Державне підприємство, 720.5kb.
- 1. Назва модуля, 92.33kb.
- 1. Назва модуля, 79.93kb.
- 2. Т84. Государственные поверочные схемы т 84 Измерения геометрических величин, 3468.15kb.
- Завдання теоретичного туру IІ етапу Всеукраїнської олімпіади з трудового навчання, 108.23kb.
1 2
Розділ 19
ВИМІРЮВАННЯ НЕЕЛЕКТРИЧНИХ ВЕЛИЧИН
19.1. Вимірювання механічних величин
Вимірювання геометричних розмірів. Діапазон лінійних, розмірів надзвичайно широкий: від часток мікрометра (при визначенні товщини тонких плівок або шорсткості поверхні) до сотень і тисяч кілометрів (при вимірюванні відстаней у геодезії, навігації чи астрономії). Діапазон вимірювання кутових розмірів лежить у межах від мінут до 360°.
Для вимірювань і контролю геометричних розмірів у машинобудуванні переважно застосовують індуктивні, контактні та ємнісні перетворювачі. Особливість таких вимірювань полягає в тому, що вимірюють не сам розмір, а лише його відхилення від певного значення, які не перевищують часток міліметра.
На рис. 196 зображено схему пристрою для контролю-лінійних розмірів деталей з допомогою диференційного індуктивного перетворювача малих переміщень. Розміром деталі 1 визначається положення якоря 2, а отже, і відношення опорів Z1 і Z2 котушок 3 та 4, які разом з резисторами R3 і R4 утворюють вимірювальне коло. Індикатором, переміщення є чутливий магнітоелектричний прилад, підімкнений до виходу фазочутливої кільцевої схеми випрямлення. Реостат р призначений для встановлення нуля приладу. Залежність струму в індикаторі від значень опорів перетворювача при переміщенні якоря (прямими і зворотними опорами випрямлячів, індуктивним індикатора та активними індуктивних перетворювачів нехтують) визначають як
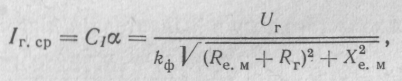
де &ф=1,11 — коефіцієнт форми синусоїдної напруги; СІ — стала індикатора за струмом; а—відхилення покажчика індикатора; Rr — опір індикатора; Re. м і Х&. „ — відповідно активний та індуктивний вихідні опори моста, визначені як

(Хп — індуктивний опір перетворювача; R3 = R4 = R)
де ΔХП—зміна індуктивного опору, спричинена відхиленням досліджуваного розміру від його середнього значення.
Промислові зразки таких приладів мають межі вимірювань ±(0,02 -f- 0,5) мм і поріг чутливості, не більший за ±(0,001 ÷ 0,01) мм.
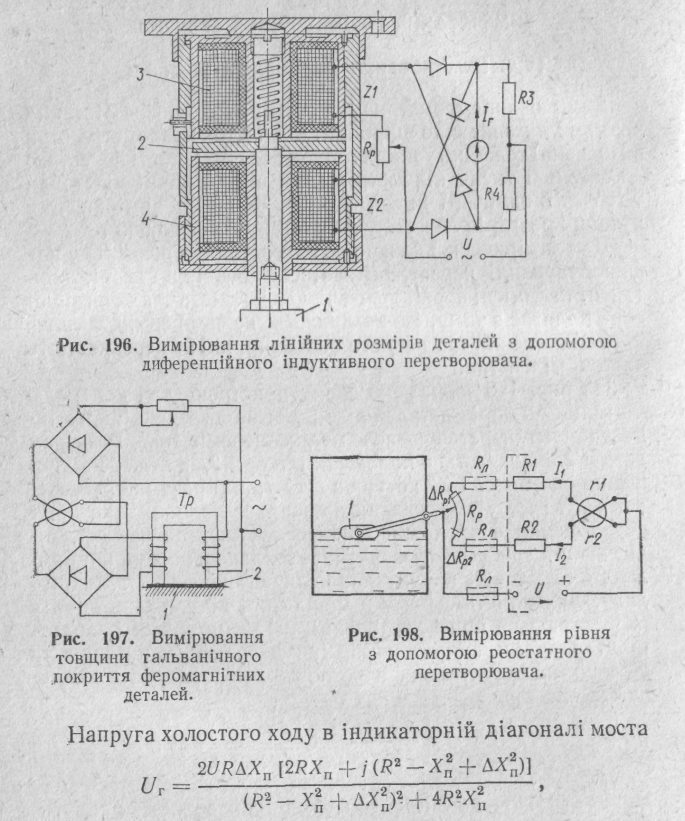
Іншим прикладом застосування індуктивного перетворювача є прилад ТМП-48, призначений для вимірювань товщини гальванічного покриття феромагнітних деталей від
2 до 60 мкм (рис. 197). В ньому застосовується трансформаторний вимірювальний перетворювач Тр з розімкненим магнітним колом, магнітний потік якого замикається через досліджувану деталь 1. Робочий зазор дорівнює вимірюваній товщині неферомагнітного покриття 2. При живленні схеми від стабілізованого джерела або застосуванні логометричного покажчика усувається вплив коливань напруги мережі на результат вимірювання.
Методи вимірювання рівня рідин в межах від сантиметрів до кількох метрів найчастіше грунтуються на застосуванні поплавків і масштабних перетворювачів їх переміщень у вигляді важільних або ремінних передач. Порівняно невеликі вихідні переміщення вимірюють з допомогою реостатних індуктивних перетворювачів.
Найпростішими і найпоширенішими є реостатні рівнеміри (рис. 198), які використовують в автомобілях, літаках тощо. Поплавок / міститься в баку з рідиною і механічно зв'язаний з повзунком реохорда Rp. При зміні положення повзунка змінюється відношення струмів /!//2 у рамках логометра, що зумовлює відхилення його покажчика. Резистори R1 і R2 установлюють певний діапазон вимірювань.
Знаючи межі діапазону відношень струмів логометра (І1/І2)Макс (І1/І2)мін опори рамок r1 i r2 , а ткож І1мін та І2min — мінімальні струми рамок, потрібні для стійкої роботи логометра, можна знайти значення опорів R1 і R2
3 рівнянь:
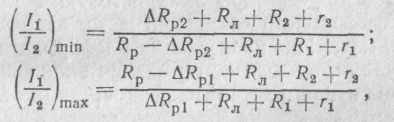
де Rр — опір реохорда, ΔR1 і ΔRp2—частини опору реохорда, що визначаються межами переміщення повзунка реохорда, Rл опір лінії; U — напруга живлення схеми, значення якої має задовольняти умови

Аналогічну вимірювальну схему можна використати для вимірювань кутових переміщень з допомогою реостатного перетворювача.
Поріг чутливості реостатних перетворювачів дорівнює 10—20 мінут.
Вимірювання відстаней, які проходять наземні рухомі об'єкти, найчастіше здійснюється перетворенням числа обертів колеса, що котиться по шляху, на кількість електричних імпульсів. При цьому використовують електронні лічильники кількості імпульсів.
Великі відстані (у авіації і ракетній техніці) вимірюють радіолокаційним методом, який полягає у вимірюванні часу проходження радіоімпульсу від передавача до об'єкта і назад до приймача. Для вимірювання відстаней у кілька сотень метрів застосовують акустичну локацію.
Вимірювання механічних сил, напружень і деформацій. Вимірювання відносної деформації Δl/l і механічного напруження а в межах сталого значення модуля пружності Е є одним і тим самим завданням, оскільки для кожного матеріалу
Для вимірювань механічних напружень і деформацій найчастіше застосовують тензорезистори, які наклеюють на об'єкт. Металевими тензорезисторами вимірюють відносні деформації від 0,002 до 2%, а напівпровідниковими —до 0,1%. Дротяними тензорезисторами, закріпленими на кінцях бази, вимірюють деформації до 6—10%. Через малу інерційність тензорезистори використовують для вимірювань змінних деформацій у діапазоні частот від О до ЮОкГц.
Оскільки механічне напруження і деформація є векторними величинами, тензорезистор має бути наклеєний на поверхню досліджуваної деталі вздовж напрямку їх дії. При цьому
де k —відносна чутливість перетворювача; єк—відносна зміна опору.
Для вимірювань механічних сил і тисків використовують методи з безпосереднім перетворенням вимірюваної величини на електричний сигнал або з проміжним перетворенням вимірюваної величини на механічне напруження. В приладах, які базуються на першому методі, використовують магнітопружні та п'єзоелектричні .перетворювачі. Останні застосовують лише для вимірювання змінних сил і тисків,
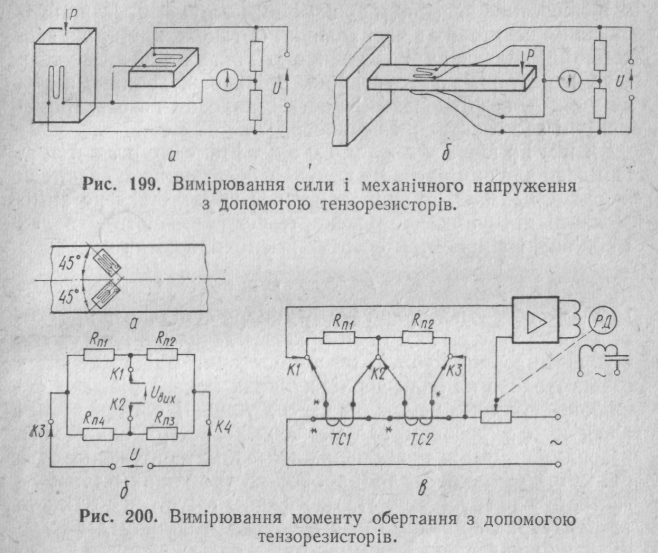
що змінюються з частотою, не меншою ніж 5 Гц. У приладах другої групи проміжне перетворення вимірюваної величини на механічне напруження може здійснюватись тензорезисторами, закріпленими безпосередньо на деталі, що досліджується, або на спеціальних пружних елементах (пружинах, мембранах і т. п.). Для вимірювань зміни опору тензорезистор найчастіше вмикається в мостову схему. Щоб зменшити температурну похибку, в сусіднє плече моста вмикається аналогічний компенсаційний тензорезистор, який має бути наклеєний на той самий матеріал і перебувати в ідентичних температурних умовах, але не деформуватися під дією вимірюваної величини (рис. 199,а). Із зміною температури опори робочого і компенсаційного перетворювачів зміняться на однакову величину і рівновага моста не порушиться. В окремих випадках вдається розмістити на об'єкті два тензорезистори, які мають однакові деформації протилежних знаків (рис. 199,6). При цьому не тільки досягається температурна компенсація, а й удвоє підвищується чутливість.
Живлення вимірювальних схем з тензорезисторами може здійснюватись постійним або змінним струмами. Для вимірювання незмінних в часі величин (а також змінних з частотою, не більше за 1 Гц) широко використовують мости і компенсатори з автоматичним зрівноважуванням, а для змінних —незрівноважені мости з виходом на електромеханічні або електронні осцилографи.
Вимірювання моментів обертання. Прилади для вимірювання моментів обертання називаються торсіометрами. Принцип їх роботи грунтується на вимірюванні дотичних напружень т, що виникають у валах і пов'язані з моментом обертання співвідношенням
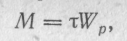
де Wp = лг3/2— полярний момент опору суцільного круглого вала з радіусом г. Для вимірювань дотичних напружень можна використовувати тензорезистори, які наклеюють безпосередньо на вали досліджуваних механізмів, а у випадках, коли це неможливо,— на пружні елементи, які з'єднують з робочим валом. Тензорезистори наклеюють вздовж напрямків найбільших дотичних напружень, тобто під кутом 45° до осі вала (рис. 200,а). Вмиканням тензорезисторів у два сусідні плеча моста забезпечується не тільки температурна компенсація, а й усунення впливу деформацій згину на результат вимірювання, оскільки знаки і значення деформацій обох перетворювачів однакові.
Найважливішою частиною таких торсіометрів є струмознімач, що з'єднує тензорезистори з електричним колом. Його виготовляють у вигляді контактного кільця, насадженого на вал, і контактної щітки. Значний вплив на результат вимірювань можуть мати варіації перехідних опорів контактів і контактні термо-е. р. с., які виникають під дією нагрівання рухомих контактів від тертя. Щоб зменшити цей вплив, щітки і кільця виготовляють з матеріалів, що мають у парі малі перехідний опір і термо-е. р. с., а також застосовують відповідні вимірювальні схеми. Наприклад, значного зменшення впливу варіації опорів контактів можна добитись, якщо розмістити на валу чотири тензорезистори Rn1…., R4 і з'єднати їх так, щоб опори контактів К.1...К.4 додавались лише до опорів джерела живлення та індикатора моста, не впливаючи на значення опорів його плечей (рис. 200,6). Щоб усунути дію паразитних термо-е. р. с., вимірювальні схеми треба живити змінним струмом. У схемі автоматичного компенсатора змінного струму
(рис. 200,в) вплив варіацій перехідних опорів і контактних е. р. с. на результат вимірювань незначний. Зміни опорів контактів Kl, К2, К.З у вторинному колі трансформаторів струму TCI, TC2 спричинюють зміни як вторинного, так і первинного струму. Оскільки коефіцієнт трансформації при цьому не змінюється, то ці зміни не впливають на покази приладу.
Похибка вимірювання моментів обертання з допомогою наклеєних тензорезисторів може не перевищувати ±(14-2)% при попередньому градуюванні вала з наклеєними тензорезипорів Без такого градуювання похибка перевищує ±(5÷10)%
Широко застосовуються для вимірювання моментів обертання методи, що грунтуються на вимірюванні кута скручування пружних елементів (спеціальної пружної муфти, вала) з допомогою індуктивних, індукційних та інших перетворювачів.
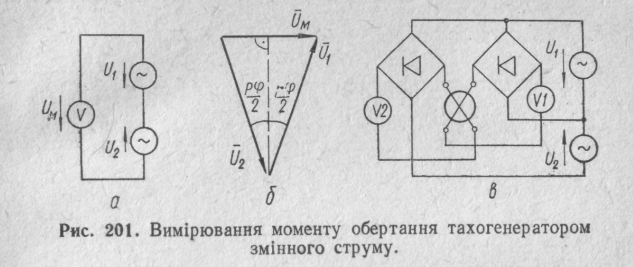
Обертаючий момент визначають, вимірюючи різницю напруг двох тахогенераторів змінного струму, насаджених на два кінці вала, що скручується (рис. 201,а). При відсутності моменту обертання напруги тахогенераторів є однакові за модулем і показ вольтметра дорівнює нулю. Під дією моменту обертання вал скручується на кут
де /, d — довжина активної частини і діаметр вала; а — модуль зсуву матеріалу вала.
Скручування вала спричинює зсув фаз між напругами тахогенераторів на кут ¥ = рγ, де р —число пар полюсів тахогенератора.
Отже, показ вольтметра залежить від моменту обертання при незмінному значенні U, тобто при незмінній швидкості обертання вала. Щоб усунути залежність показів приладу від швидкості обертання вала, доцільно застосувати магнітоелектричний логометр, увімкнений за схемою на рис. 201,в. Показ логометра визначається відношенням UJU і не залежить від швидкості обертання вала. Слід відзначити, що, вмикаючи послідовно з обмотками логометра додаткові вольтметри VI і V2, ми можемо за їх показами визначити швидкість обертання п і потужність Р, яка передається валом. Показ VI, пропорційний модулю напруги U І, отже, і швидкості, а показ V2 залежить від напруги U2, яка пропорційна потужності. Враховуючи, що Р — Мп;
Для вимірювання великих моментів обертання (наприклад, на валах бурових інструментів) застосовують магніто-пружні трансформаторні перетворювачі, у яких як магніто-пружний елемент, магнітна проникність якого змінюється під дією моменту обертання, використовують сам сталевий вал. Перевага такого методу полягає в тому, що як намагнічуюча, так і вторинна обмотки перетворювача розміщені на нерухомому статорі, чим забезпечується висока надійність. Похибка вимірювання моментів з допомогою серійних пристроїв такого типу не перевищує ±1,5%.
Вимірювання параметрів руху. Основні параметри механічного руху — переміщення, швидкість і прискорення —пов'язані між собою простими диференціальними залежностями, які часто використовують при будові приладів, оскільки вимірювання одного з параметрів
дозволяє знайти інший, використовуючи диференціювання
або інтегрування.
Діапазон швидкостей, який вимірюють електричними засобами, лежить в межах від 10-7 до 1,2 • 104 м/с, прискорень — від 10-6 до
6 • 105 м/с2.
При малих переміщеннях об'єктів відносно опорної точки параметри їх руху вимірюють такими самими методами, як і геометричні розміри. При великих переміщеннях результат вимірювання дістають додаванням дискретних переміщень від однієї мітки до іншої. Наприклад, шлях, пройдений автомобілем, вимірюють числом обертів колеса з допомогою електроконтактних, індукційних або інших
лічильників.
Число обертів за одиницю часу визначається тахометром, який звичайно являє собою генератор постійного або змінного струму. Недоліком тахогенераторів постійного струму є колектор, який може забруднитись і вийти з ладу. Надійнішими є безколекторні тахогенератори змінного струму, у яких е. р. с. знімають з обмоток статора, а ротор виконують з постійних магнітів. Вихідний сигнал таких тахогенераторів вимірюють магнітоелектричним приладом, увімкненим через напівпровідниковий випрямляч.
Вимірювання параметрів вібрацій найчастіше здійснюється з допомогою механічної коливальної системи й перетворювача (індуктивного або ємнісного), що сприймає ці коливання і перетворює їх на електричний сигнал.
Основним параметром руху рідин і газів є витрата кількості речовини, що протікає через повний переріз за одиницю часу. Як малі, так і дуже великі витрати (до кількох тисяч кубометрів за годину) можна вимірювати тепловими витратомірами. Обов'язковим елементом теплових витратомірів є нагрівник, що нагріває ділянку труби (в калориметричних витратомірах) або чутливий елемент термоанемометра. Вихідний сигнал у першому випадку є функцією різниці температур, що вимірюється двома термометрами, розміщеними вздовж труби, у другому випадку — функцією температури термоанемометра. В обох випадках потужність нагрівника треба підтримувати постійною або живити нагрівник і вимірювальну схему від одного джерела.
Оскільки потужність нагрівника при вимірюванні витрат рідин має бути значною через велику теплоємність і теплопровідність рідин, теплові витратоміри використовують в основному для вимірювання витрат газів.
19.2. Вимірювання температури
Методи вимірювання температури можна поділити на контактні, при яких чутливий елемент термометра має безпосередній тепловий контакт з досліджуваним середовищем, і безконтактні, принцип дії яких грунтується на тепловому вимірюванні нагрітих тіл.
При контактних методах вимірювання температури застосовують термометри опору і термоелектричні. Термометрами опору вимірюють температури від —260 до 1300° С (табл. 16). Платинові термометри опору забезпечують найвищу точність вимірювання, завдяки цьому їх використовують для відтворення міжнародної температурної шкали в діапазоні від —183 до 630° С і як зразкові (для перевірки інших засобів вимірювань температури).
Для вимірювань температури термометрами опору найчастіше застосовують магнітоелектричні логометри, а також кезрівноважені і автоматичні мости й потенціометри.
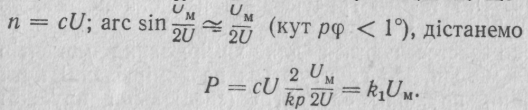
Найпростішу схему вимірювання температури з допомогою термометра і магнітоелектричного логометра наведено на рис. 202, а. Для зменшення впливу опорів з'єднувальних ліній на результати вимірювання застосовують трипровідне під'єднання термометра до логометра. Опір лінії глз, який вмикають у коло живлення логометра, не впливає на його покази, а опори ліній гл\ і Лп2 додаються до опорів у паралельних колах рамок, внаслідок чого значно зменшується вплив опорів цих ліній на покази логометра. У приладах серійного виробництва використовується схема (рис. 202, б), де опори ліній rлі і rл2 додаються до опорів двох сусідніх плечей моста і при rп1 = rл2; R± = R2 та Rt = R3 вплив температурних змін опорів цих ліній взаємно компенсується. Із зміною опору термометра рівність Rt = /?3 порушується, але вплив опорів ліній залишається досить малим, тому що їх значення е значно меншими від значень опорів плечей моста. Крім цього, опори ліній rл1 і rЛ2 підганяють до певного значення (2,5 або 7,5 Ом), яке враховують при градуюванні приладу і вказують на його шкалі. Значення опорів R1 — R4 залежать від меж вимірювання температури і параметрів термометра й логометра. Для комленсації температурної похибки логометра опір Rt виконують частково з міді.
Вимірювання температури з допомогою незрівноважених потенціометрів і мостів здійснюють за схемами, пода-
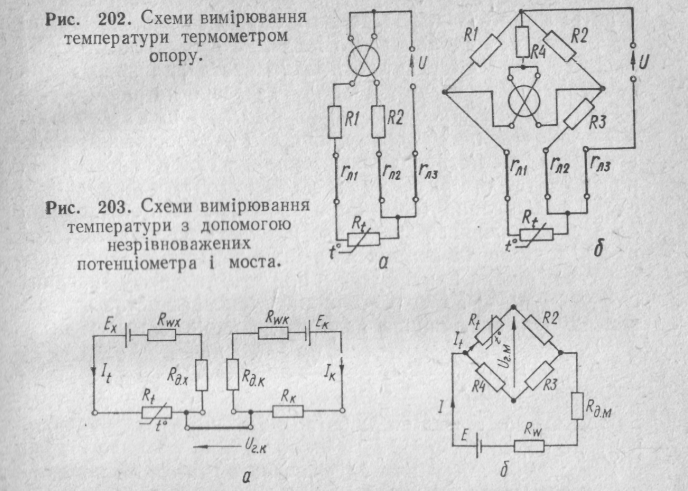
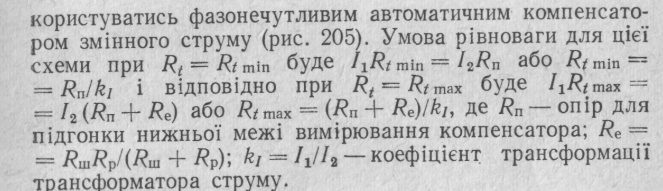
ними на рис. 203, де Ех, Eк, Е, Rwx, RWK і Rw — е. p. c. та внутрішні опори стабілізованих джерел напруги. Для компенсаційної (рис. 203, а) та мостової (рис. 203,6) схем відповідно маємо

де Rt0 — початкове значення опору термометра, при якому Ur. к = ur.m = 0; ΔRt — приріст опору термометра від зміни вимірюваної температури.
Для обмеження струмів у термометрах та компенсаційному опорі RK введено опори Rдх , Rдк та Яд.м - Для зменшення впливу з'єднувальних ліній на результат вимірювання в компенсаційній схемі застосовують чотирипровідне під'єднання термометрів, а в мостовій — три- або чотирипровідне. При трипровідному під'єднанні як і в схемі на рис. 202, б, опори R2 і R3 вибирають однаковими, а при чотирипровідному краще брати R2 = R4 = R.
Як покажчики температури у незрівноважених мостах і потенціометрах доцільно застосовувати вузькопрофільні магнітоелектричні мілівольтметри.
Спрощену схему автоматичного моста для вимірювань температури термометром опору наведено на рис. 204, де Rt — термометр опору; Rp — реохорд; Rш — шунт реохорда; ЕП — електронний підсилювач; РД — реверсивний двигун. Для зменшення впливу опорів з'єднувальних ліній на результат вимірювання також застосовують трипровідну схему під'єднання термометра та обмежують опори ліній rл\ і rЛ2 до певного значення. Найчастіше роблять R2 = R3, тоді повна компенсація опорів ліній є в початковій точці шкали приладу (tmin) при мінімальному значенні опору Rt — Rmin. Отже, рівняння рівноваги моста матиме вигляд (враховуючи, що RK = RpRm/(RP + Rui))

Звідси видно, що зміна опорів ліній на однакову величину не порушить рівноваги моста. В інших точках шкали зміна опорів ліній викликає незначну похибку. Умову рівноваги моста для точки /тах можна подати як
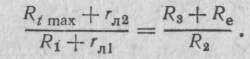
Максимальне значення струму термометра визначається за формулою

Ці три рівняння і умова R2 = R3 дають змогу при певних значеннях Rtmin , Rtmax, rл1 = rn2 = гл, Rp, U та Ітmin знайти значення опорів Re, Rlt R2, Rm і R3, які потрібні для забезпечення певного діапазону вимірювань температури. Зауважимо, що коли в результаті розрахунку дістають Re > Rp, то в схему треба ввести додатковий опір R6, прийняти його рівним, наприклад, 200 Ом і повторювати розрахунок доти, поки Re Rp.
У мостових схемах можна достатньо зменшити вплив з'єднувальних ліній лише при Rt ≥ 10 Ом.
Для вимірювання менших опорів термометрів (наприклад, при вимірюванні температур до — 260° С або при застосуванні термометрів з опором чутливого елемента 0,1 — 1 Ом для вимірювань високих температур) можна
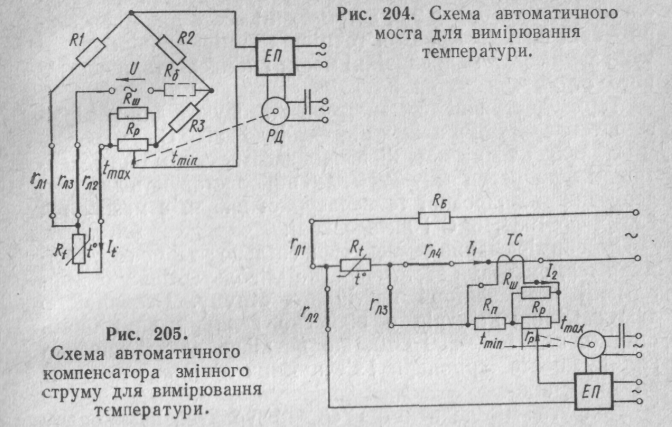
Опори ліній не впливають на показ приладу, тому що лінії гл2 і гл3 включено у вхідне коло підсилювала, де в момент компенсації струм дорівнює нулю, а опори rл1 і rл4 можуть впливати лише на значення струмів І1 і І2 а не на коефіцієнт трансформації Rп.
При певних значеннях І1, І2, Rtmin i Rtmax з приведених вище рівнянь можна знайти значення опорів Rn, Re, а також і Rm. Значення опору R6, який обмежує струм у термометрі, визначають з формули

де Rtcp = (Rтmах + Rtmin)/2; Rтр— еквівалентний вхідний опір трансформатора струму з урахуванням вторинного навантаження Rn + Re.
Логометричні вимірювачі температури випускають класів точності від 0,2 до 2,5; автоматичні мости і компенсатори — від 0,25 до 1,5. Для точніших вимірювань температури застосовують прецизійні мости і компенсатори постійного струму.
Термоелектричні термометри застосовують для вимірювань температури в межах від —200 до 2500° С.
Найвищу точність вимірювань забезпечують термоелектричні термометри типу ТПП, які використовують для відтворення міжнародної температурної шкали в межах від 630,74 до 1064,46° С і як зразкові.
Для вимірювання температури спільно з термоелектричними термометрами застосовують мілівольтметри або автоматичні компенсатори постійного струму. Особливістю таких мілівольтметрів є відносно великий внутрішній опір (понад 100—500 Ом), що потрібно для зменшення впливу опорів термопари і з'єднуючих ліній на результат вимірювання.
Напруга мілівольтметра Umv з урахуванням опору термопари rt і сумарного опору ліній гл зв'язана з електрорушійною силою термопари E залежністю

Звідси видно, що напруга за показом мілівольтметра дорівнює е. р. с. термопари незалежно від опорів її ліній при умові Rmv »(rt+rл). Практично досить, щоб Rmv»500 (rt + гл)/К, Де К — клас точності мілівольтметра. Якщо ця умова не виконується, то сумарний опір термопари і ліній з допомогою додаткового резистора підганяють до певного значення зовнішнього опору (0,6; 1,6; 5 або 15 Ом), який враховують при градуюванні мілівольтметра в °С і вказують на його шкалі.
Повністю усувають вплив опорів ліній, вимірюючи е. р. с. термопар компенсаційним методом, що зумовлюється відсутністю струму в лініях у момент рівноваги компенсатора.
Коливання температури вільних кінців термопар значно впливають на результат вимірювання температури з допомогою термоелектричних термометрів. Практично вільними від цього впливу є лише термоелектричні термометри типу ТВР і ТПР, е. р. с. яких майже не залежить від зміни температури вільних кінців у межах від О до 300° С. Усувають цей вплив термостатуванням віль-
них кінців термопар і введенням відповідних поправок, що може виконуватись автоматично з допомогою схем з термозалежними елементами. Зокрема, вимірявши е. р. с. термопари E'-s при температурах робочого /р і вільних U кінців, для знаходження вимірюваної температури за градуювальними таблицями (складеними для tB == 0° С) до виміряного значення е. р. с. треба додати поправку Д.£т, що дорівнює е. р. с. термопари при температурі робочого кінця tp = tB і вільних кінців — 0° С:

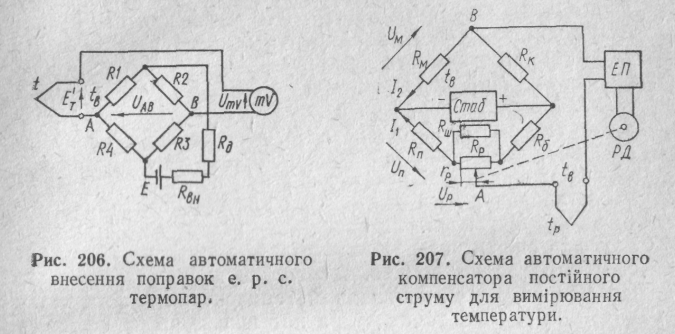
Один із способів автоматичного внесення поправок залежно від температури вільних кінців термопар ілюструється з допомогою схеми на рис. 206. В цій схемі між термопарою і вторинним приладом вмикають незрівноважений міст, що складається з манганінових резисторів R2, R3 і R4 та резистора з міді R1, який знаходиться в однаковим температурних умовах з вільними кінцями термопари. Параметри моста підбирають так, щоб при певному значенні температури вільних кінців (наприклад, 0° С) він знаходився в рівновазі, а при відхиленні температури вільних кінців від цього значення в діагоналі А —В виникала напруга що дорівнює поправці Л.ЕТ до значення е. р. с. термопари Для схеми на рис. 206 напругу uab визначають за формулою

де Е і £?„„ — значення е. р. с. і внутрішнього опору джерела живлення моста; R і а—значення опору при 0°С і температурного коефіцієнта мідного резистора R1, Rд — опір підгоночного резистора.
Автоматичні компенсатори постійного струму для вимірювання температури в комплекті з термоелектричними термометрами будують за схемою, зображеною на рис. 207, де Rp — опір реохорда; Rn і Rm — опори для підгонки відповідно початку й кінця шкали при градуюванні приладу; Re і rk — опори для встановлення робочого струму компенсатора; RM — мідна або нікелева котушка опору, яка призначена для автоматичної компенсації зміни термо- е. р. с. термоелектричного термометра, що спричинюється коливанням температури tB його вільних кінців. Щоб температура котушки завжди дорівнювала tB, її розміщують усередині приладу в місці під'єднання вільних кінців.
Значно впливають на точність вимірювань температури контактним методом умови теплообміну між перетворювачем і досліджуваним середовищем, тому що вихідна величина перетворювача визначається температурою його чутливого елемента, яка може відрізнятись від температури досліджуваного середовища залежно від умов теплообміну. Для зменшення впливу на цю різницю відводу тепла за рахунок теплопровідності арматури термометра при вимірюванні температури газів і рідин у трубопроводах термометри слід розташовувати вздовж осі трубопроводу робочим кінцем назустріч потоку. Це забезпечує мінімальний градієнт температури по довжині термометра в зоні чутливого елемента. Для зменшення втрат тепла чутливим елементом через наявність випромінювання треба зменшувати різницю між температурами чутливого елемента і стінками трубопроводу (застосовують теплоізоляцію трубопроводу).
Вимірювання температури безконтактним методом. Прилади для вимірювання температури, принцип дії яких грунтується на використанні енергії випромінювання нагрітих тіл, називаються пірометрами. Важлива позитивна властивість цих приладів полягає в тому, що вони не спотворюють температурного поля досліджуваного об'єкта і не мають принципових обмежень для розширення меж вимірювань високих температур. Пірометри можна поділити на яскравісні, радіаційні, колірні.
Яскравісні пірометри — це прилади, у яких на вузькій ділянці спектра порівнюються яскравості досліджуваного
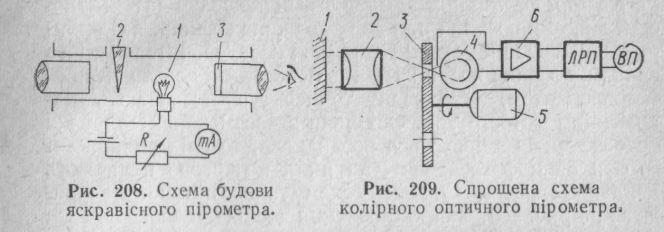
об'єкта і зразкового випромінювача. Зразковим джерелом яскравості найчастіше є лампа розжарювання / з плоскою (не скрученою в спіраль) вольфрамовою ниткою, що проектується на фоні досліджуваного об'єкта (рис. 208). Якщо яскравість нитки є менша від яскравості досліджуваного об'єкта, то вона виглядає темною на світлому фоні, а коли більша, то світлішою. Якщо яскравості будуть однакові, то нитки не буде видно на фоні розжареного тіла. Для вирівнювання яскравостей змінюють значення струму лампи з допомогою реостата. При цьому шкала амперметра градуюється в ° С (для точніших вимірювань струму користуються компенсаційним методом). Оскільки нитку лампи можна нагрівати лише до температури 1400° С, то для вимірювань більш високих температур застосовують світлофільтр 2, який послаблює інтенсивність випромінювання об'єкта. В деяких конструкціях для вирівнювання яскравостей при постійному значенні струму лампи користуються пересувним світлофільтром із змінною густиною, так званим оптичним клином. Тоді температурну шкалу наносять на пристрій для зміни положення оптичного клина. В приладах з ручним зрівноважуванням момент співпадання яскравостей визначається експериментатором візуально, а в приладах з автоматичним зрівноважуванням—з допомогою фотоелемента. Щоб порівнювати інтенсивності випромінювання в спектрі монохроматичних променів, у пірометрі застосовують червоний світлофільтр 3, який пропускає промені з довжиною хвилі 0,62 мкм і більше. Око людини чутливе до променів з довжиною хвилі до 0,73 мкм, тому порівнюють інтенсивності випромінювання у вузькому спектрі —0,62÷О,73 мкм.
Серійні яскравісні пірометри призначені для вимірювань температур від 700 до 6000° С. Похибка вимірювання може не перевищувати ±(0,6-г-2)%.
Колірні пірометри вимірюють відношення інтенсивностей випромінювання при двох довжинах хвиль, які вибирають у червоній та синій ділянках спектра. Інтенсивність випромінювання кожної з хвиль можна вимірювати певним, фотоелементом, вимірювану температуру визначають відношенням фотострумів. Оскільки з часом характеристики фотоелементів змінюються неоднаково, то слід використовувати один фотоелемент, на який почергово попадають хвилі двох довжин. Спрощену схему такого пірометра зображено на рис. 209. Випромінювання досліджуваного об'єкта 1 фокусується об'єктивом 2 і попадає на фотоелемент 4 через отвори в диску 3 з світлофільтрами, які виділяють дві (або чотири) ділянки спектра. Диск обертається з допомогою двигуна 5.
Таким чином, випромінювання всіх ділянок спектра сприймається і підсилюється одним і тим самим фотоелементом 4 та підсилювачем 6, завдяки чому нестабільність їх параметрів не впливає на результат вимірювання відношення інтенсивності випромінювання.
Сигнали з підсилювача попадають почергово на вхід дічильно-розв'язувального пристрою (ЛРП), який видає результат на вихідний покажчик (ВП).
Перевагами колірних пірометрів є незалежність показів від відстані до досліджуваного об'єкта, а також від поглинання радіації в середовищі між пірометром і досліджуваним об'єктом, якщо коефіцієнт поглинання є однаковим для обох довжин хвиль, їх недоліком є відносна складність.
Прикладом колірного пірометра може бути прилад типу ЦЗП-3, який дає змогу вимірювати температуру в межах 1400—2800° С з похибкою до ±=1 %.
У радіаційних пірометрах вимірюють інтегральне (повне) теплове випромінювання. Приймач інтегрального випромінювання має бути чутливим практично до всіх довжин хвиль, і його виконують у вигляді тонкої металевої пластинки, покритої сажею. Приймач, оптична система (призначена для концентрації потоку енергії на приймач) та інші додаткові пристрої утворюють телескоп радіаційного пірометра, який розміщують у металевому корпусі.
Звичайно температура приймача перетворюється в електричний сигнал з допомогою батареї термопар. Холодні кінці термопар розміщені так, що температура їх близька до температури корпуса телескопа, внаслідок чого зміна температури телескопа може мати суттєвий вплив на результат вимірювання. Для компенсації коливань температури
холодних кінців термопар використовують біметалеві пластинки. Із зміною температури корпуса пластинки деформуються і керують заслінками, що перекривають або розширюють отвір, через який потік енергії випромінювання падає на приймач. Використовують також метод компенсації з допомогою мідного або нікелевого резистора, який шунтує термобатарею.
Температура, виміряна радіаційним пірометром /р, є менша від дійсної температури тіла t через неповне випромінювання. Зв'язок радіаційної температури з дійсною
визначається співвідношенням tр =
 . Оскільки коефіцієнт неповноти випромінювання е може мати значення від 0,1 до 0,9 залежно від об'єкта досліджування, то градуювання пірометрів треба проводити на об'єктах, що ідентичні тим, температура яких вимірюється.
. Оскільки коефіцієнт неповноти випромінювання е може мати значення від 0,1 до 0,9 залежно від об'єкта досліджування, то градуювання пірометрів треба проводити на об'єктах, що ідентичні тим, температура яких вимірюється.Радіаційні пірометри застосовують для вимірювання температури від 20 до 3000° С. Основна похибка таких пірометрів для температури 100° С не перевищує +12° С, для температури 3000° С — +35°С.