
«Геофизика»
| Вид материала | Тезисы |
- «Научно-производственная фирма «Геофизика», 290.7kb.
- На основе сейсмических исследований, 251.94kb.
- Повышение эффективности выработки трудноизвлекаемых запасов нефти месторождений в заключительной, 293.03kb.
- Повышение эффективности эксплуатации скважин электроцентробежными насосами после гидравлического, 237.59kb.
- Геолого-геофизическое доизучение ромашкинского нефтяного месторождения на поздней стадии, 406.7kb.
- Совершенствование метрологического обеспечения нейтронного каротажа нефтегазовых скважин, 347.82kb.
- Развитие системы метрологического обеспечения геофизических исследований в нефтегазовых, 824kb.
- Сейсмогеологическое прогнозирование залежей углеводородов в нижнепермских отложениях, 294.71kb.
- Программа курса для студентов 2-3 курсов специальности 020302 геофизика Составитель, 144.01kb.
- Совершенствование эксплуатации скважин установками электроцентробежных насосов с эжектором, 205.08kb.
В.Ш. Дубинский, Ксиаоминг Танг, Даг Паттерсон,
Киаттисак Петписит («Бэйкер Хьюз», г. Хьюстон, США)
За последние двадцать лет нефтедобывающие и сервисные компании совершили огромный рывок в расширении возможностей акустического каротажа на кабеле. Помимо стандартных методик замера параметров продольных и поперечных волн, накопленные новые знания позволили создать технологии для получения качественных кросс-дипольных измерений скоростей поперечных волн, а также оценивать азимутальную анизотропию, определять направления градиента напряжений и трещин в горной породе. Анализ акустического интервального времени для продольных и поперечных волн (Dtp, Dts) в режиме реального времени дает ценный вклад в геолого-геофизические модели. В сочетании с поверхностными сейсмическими данными эти модели используются для вычисления кривой распределения давления вдоль ствола скважины и оценки свойств пласта в режиме реального времени. Это, в свою очередь, обеспечивает оперативные данные по стабильности ствола скважины и рекомендации по изменениям программы подачи бурового раствора в процессе бурения. Все это позволяет оптимизировать конструкцию и процесс строительства скважины, а также сэкономить временные затраты на бурение и предупредить возможные осложнения.
Основная проблема, стоящая сегодня перед разработчиками систем акустического каротажа в процессе бурения (LWD), состоит в необходимости обеспечения качественных измерений величин продольной и поперечной акустических скоростей в различных формациях при высоком уровне вибраций и шумов, связанных с бурением. Эти условия заведомо значительно хуже условий при каротаже на кабеле.
В данном докладе описана современная скважинная аппаратура для проведения качественного акустического каротажа во время бурения. Она включает в себя 4-сегментный пьезоэлектрический источник, способный функционировать в различных режимах излучения - монопольном, дипольном и квадрупольном. Приемная антенна состоит из набора элементарных приемников, распределенных группами вдоль оси прибора, с азимутальным охватом 360 градусов, по 4 приемника на каждом уровне.
В системе использованы прогрессивные методы обработки сигналов, позволяющие уменьшить негативное воздействие факторов бурения.
Конструкция прибора. Описываемая система LWD для каротажа во время бурения монтируется на утяжелённых бурильных трубах (УБТ). Она состоит из излучателя и принимающих элементов с полным азимутальным охватом. Рис. 1 показывает общий вид конструкции прибора.
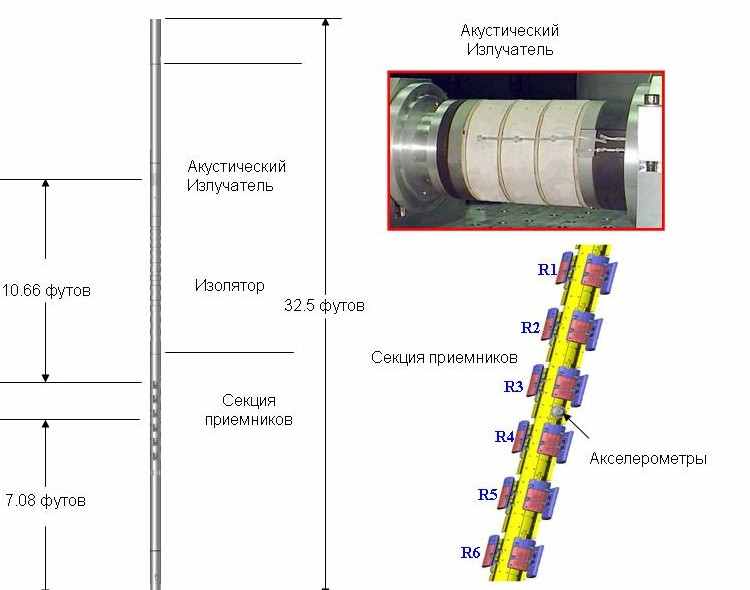
Рис. 1. Общий вид конструкции прибора
Вся система состоит из трех частей: передатчик, изолятор и секция приемников.
Модуль передатчика. Передатчик представляет собой цилиндрический пьезоэлектрический кристаллический излучатель, состоящий из трех продольных секций и четырех азимутальных сегментов. Акустическая энергия излучается в скважину и окружающий ее пласт по всем азимутальным направлениям, обеспечивая эффективную передачу энергии в пласт и последующий направленный прием головных продольных и поперечных волн. Основные режимы работы передатчика: монопольный, квадрупольный и дипольный. Источник возбуждает продольные и поперечные волны в широком диапазоне частот, включая полосу от 2 до15 кГц.
Изолятор. Помимо шумов, связанных с бурением, на приемную антенну по бурильной колонне попадает прямой сигнал от излучателя, который является помехой в нашем случае. Оригинальная и эффективная конструкция изолятора, размещенного между секцией приемников и излучателем, обеспечивает ослабление корпусной волны до - 42 dB в диапазоне частот 10-15 кГц. Таким образом, появляется возможность существенного улучшения соотношения сигнал-шум для интересующих нас сигналов, распространяющихся по породе.
Модуль приемников. Модуль приемников состоит из ортогональных пьезоэлектрических датчиков изгибного типа. Индивидуальные приемники (всего их в приборе 24) разбиты на 6 групп, по 4 элемента в каждой, для полного азимутального охвата. Эти группы равномерно распределены по оси прибора и расположены на фиксированном расстоянии 9 дюймов (22,86 см) друг от друга, при этом общая длина приемной антенны составляет 45 дюймов (114,3 см). Сложный многоэлементный приемник позволяет эффективно накапливать и суммировать данные по всем направлениям в разных режимах, оптимально используя динамический диапазон прибора для обеспечения требуемого соотношения «сигнал-шум».
Система также оснащена тремя акселерометрами, размещенными на УБТ в середине приемного модуля. Они используются для измерения осевых, радиальных и крутильных вибраций колонны в процессе бурения. Эти замеры позволяют вести мониторинг процесса бурения и осуществлять дополнительную фильтрацию информационных сигналов, зашумленных вибрациями колонны.
Система управления и электроника. Система автономного контроллерного управления инструментом обеспечивает проведение последовательных измерений в различных режимах и на разных частотах.
Также в состав прибора входит расширяемый модуль памяти размером в несколько гигабайт для записи первичных необработанных сигналов с приемников и акселерометров. Наиболее важные параметры передаются на поверхность при помощи телеметрии по гидроимпульсному каналу связи. Они включают в себя три независимых времени корреляции пиков «сэмбланс» (мера когерентности между сигналами для разных скоростей) и амплитуды этих пиков. Основной параметр - это чаще всего продольное интервальное время распространения (Dtp,), а второй — коэффициент корреляции сэмбланс (QCom), который является показателем качества измерения. Любое из этих измерений можно вывести на экран оператора MWD или бурового мастера в графическом виде в режиме реального времени.
В
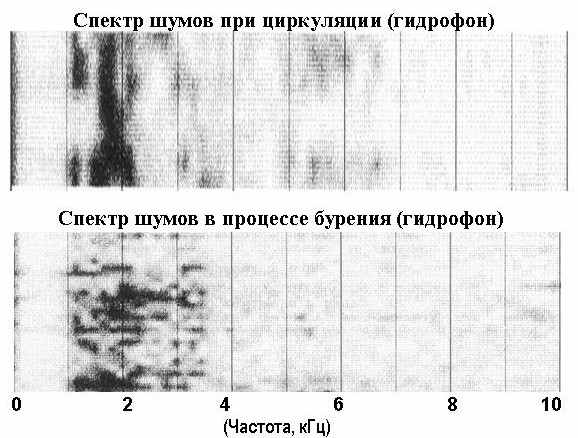 докладе представлены некоторые важные результаты исследований - записи шумов, зарегистрированных как гидрофонами (приемниками), так и акселерометрами (корпусная волна) в интересующих нас частотных диапазонах при бурении и циркуляции бурового раствора (рис. 2).
докладе представлены некоторые важные результаты исследований - записи шумов, зарегистрированных как гидрофонами (приемниками), так и акселерометрами (корпусная волна) в интересующих нас частотных диапазонах при бурении и циркуляции бурового раствора (рис. 2). Рис. 2. Спектры шумов в процессе бурения и при циркуляции раствора
Наиболее интенсивный шум наблюдается в диапазоне частот от 1 до 2.3 кГц с небольшим дополнительным вкладом на частотах от 1.3 кГц до 6.5 кГц включительно. При циркуляции максимальный шумовой сигнал возникает в окрестности 1.7 кГц. В свете этой информации мы можем сделать вывод, что оценка продольных и поперечных скоростей в низкочастотной области представляется существенно более сложной задачей, чем при каротаже на кабеле. К сожалению, интересующая нас область, где мы хотели бы качественно и с минимальным дисперсионным эффектом измерять значения поперечных скоростей, лежит именно в этом частотном диапазоне.
Основные режимы работы прибора поясняются на рис. 3:
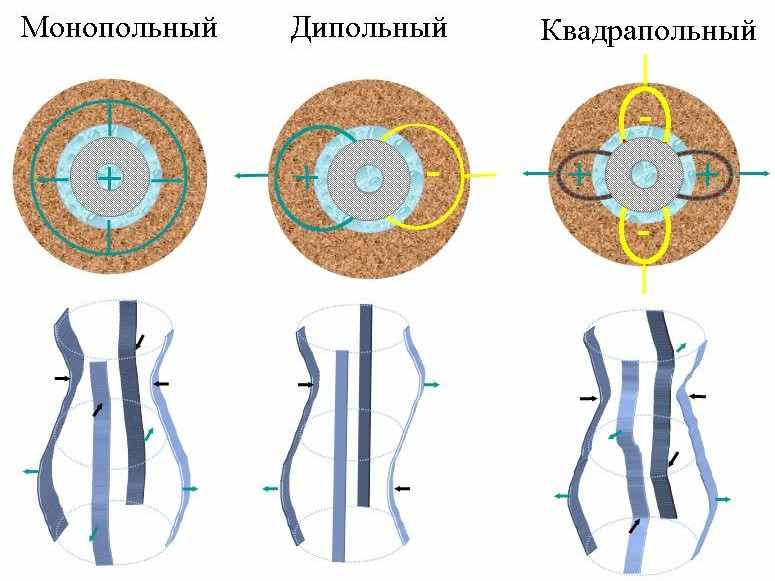
Рис 3. Основные режимы работы акустического излучателя
Монопольный всенаправленный акустический сигнал (продольная волна сжатия) формируется за счет одновременного синхронного возбуждения всех сегментов пьезоэлектрического цилиндра. В этом режиме формируется продольная головная волна: высокая частота 10-15 кГц используется для «быстрой» породы и низкая частота 2-4 кГц - для «медленной» породы. В случае «быстрой» породы возможно возникновение преломленной сдвиговой волны, что позволяет в одном режиме получить значения как для продольной, так и для поперечной составляющих акустического сигнала. В случае очень медленных пород (с интервальным временем распространения в районе 200 мксек/фут (655 мксек/м), может наблюдаться дисперсия по скорости в несколько процентов, которую необходимо корректировать (алгоритмы и методика введения поправок имеются).
Квадрупольный режим излучения используется для измерения скорости поперечной волны. В этом режиме сегменты акустического излучателя возбуждаются в фазе / противофазе попарно, при этом два противоположных сегмента всегда работают в фазе. Несмотря на традиционное использование дипольного режима для измерения скорости поперечной волны в каротаже на кабеле, ситуация с LWD совершенно иная. Массивная колонна (УБТ) с маленьким просветом между колонной и породой порождает смешанные моды и вносит существенную дисперсию (до 20-25 %) при измерении Dts в дипольном режиме. Кроме того, ввиду асимметричности излучения (изгибная мода) формируется мощная корпусная волна, которая нередко подавляет информативную составляющую сигнала по породе. Детальное аналитическое и численное моделирование подтвердило неоспоримые преимущества квадрупольного режима (рис. 4):
- Отсутствие или минимальная (единицы процентов) дисперсия при измерении поперечной скорости в «медленной» породе на низкой частоте в районе 2 кГц (режим 1);
- Отсутствие какой-либо дисперсии при измерении в «быстрой» породе на высокой частоте в районе 7-8 кГц (режим 2);
- Кроме того, при квадрупольном возбуждении практически отсутствует корпусная волна, так как происходит компенсация непосредственно при возбуждении на излучателе. Остаточная корпусная волна при квадрупольном режиме может иметь место только при существенном перекосе или эксцентриситете прибора внутри скважины.
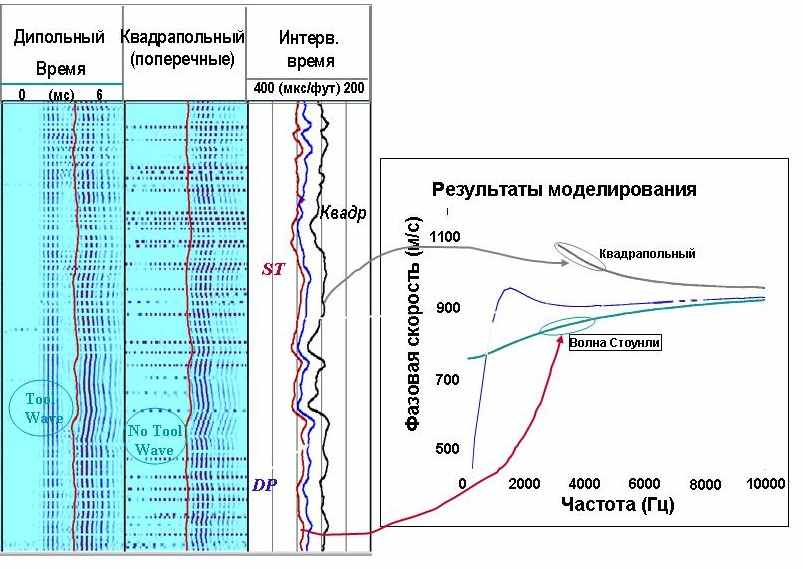
Рис.4. Квадрупольный режим для измерения поперечной скорости Vs