Технический Университет «мами»
| Вид материала | Пояснительная записка |
СодержаниеМосква – 2010 Выбираем индуктивный датчик линейных перемещений типа ДИ-1М 1 - напряжение питания -U Электрические параметры усилителя |
- Технический Университет «мами», 19.15kb.
- Технический Университет «мами», 271.88kb.
- Московский государственный технический университет «мами», 64.38kb.
- Технический Университет «мами», 198.91kb.
- Хроники объединенного фонда электронных ресурсов «наука и образование», 709.89kb.
- Московский государственный технический университет «мами», 103.59kb.
- Московский государственный технический университет, 2934.92kb.
- Осрб 1-36 04 02-2008, 702.53kb.
- Уважаемый коллега!, 100.29kb.
- «Астраханский государственный технический университет», 377.57kb.
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
Московский Государственный Технический Университет «МАМИ»
Факультет «Автоматизация и управление»
Кафедра «Автоматика и процессы управления»
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
К курсовой работе по электронике на тему:
Разработка электронной системы для автоматического контроля и сортировки поршневых колец
Студент: Емельянов Ю.А. /___________/ группа 6-УИ-5
Преподаватель: Харитонов В.И. /_________/
Оценка _______________________Дата:___________________________
МОСКВА – 2010
Задание
на курсовую работу по электронике
Выдано студенту: Емельянову Ю.А. Группа: 6-УИ-5
Выдано: 17 февраля 2010 г. Срок сдачи: 25 мая 2010 г.
- Тема курсовой работы: разработка электронной системы для контроля и управления…
- Исходные данные: номер варианта – 5; измерительная цепь – А:140; тип операционного усилителя – К140УД5Б; количество измеряемых параметров – 6; относительная погрешность квантования (
 )% - 0,5; полный диапазон входного сигнала АЦП (В) – -2,5 до 0; частота среза ФНЧ (ГЦ) – 600.
)% - 0,5; полный диапазон входного сигнала АЦП (В) – -2,5 до 0; частота среза ФНЧ (ГЦ) – 600.
- Выполнить:
- составить структурную схему устройства для автоматического контроля и сортировки поршневых колец
- разработать электрическую принципиальную схему устройства для автоматического контроля и сортировки поршневых колец.
- Пояснительную записку к курсовой работе
- Проектную документацию с использованием САПР («Компас» и MS Word)
- Представить:
- структурную (функциональную) электрическую схему устройства на листе формата А3;
- принципиальную электрическую схему устройства выполнить на листе формата А3;
- пояснительную записку, выполненную строго в соответствии с ГОСТ
Руководитель: Харитонов В.И. _______________
Описание работы САК сортировки поршневых колец.
Систем контроля сортировки поршневых колец является полностью автоматической системой, поскольку
 .
.Поршневые кольца укладываются в загрузочный бункер 6 в определенном положении, ориентированном по замку. Под бункером поступательно-возвратно передвигается каретка 5, которая своими толкателями поочередно захватывает из бункера кольца и подает их на измерительное устройство к датчику.
Поступательно-возвратное движение каретки 5 осуществляется кулисным механизмом 3, который приводится в движение при помощи электродвигателя переменного тока 1, червячного редуктора 2 и ременных передач.
Через зубчатые пары (цилиндрическую, а затем две конических) приводятся в движение валики, снабженные кулачками 11. После того как очередное кольцо поступает на измерительную позицию, нижние кулачки освобождают арретиры 4, поднимающие кольцо 10 и вводят его в два полукольца обоймы 9. Затем верхние кулачки освобождают полукольца обоймы, которые под действием стяжной пружины 8 сжимают контролируемое кольцо до исчезновения зазора в замке. После установки кольца в этом положении включается датчик 7. При этом, если зазор не соответствует заданному допуску, то сработает электромагнит 14, управляющий сортирующим желобом 13.
По окончании контроля и блокировки его сигналов, верхние кулачки освобождают полукольца обоймы, после чего нижние кулачки опускают кольцо на направляющие. Следующее кольцо, поступающее на измерительную позицию, вытолкнет проверенное на сортирующий желоб, а затем в соответствующий приемный желоб 13.
Измерительное устройство выдает сигнал измерительной информации о значении радиальной толщины поршневых колец. Измерительная информация с датчика поступает на вычислительное устройство для обработки, запоминания, отображения и формирования управляющих воздействий.
Информация с датчика поступает в блок измерительных преобразователей для масштабирования, преобразования, линеаризации, фильтрации. С помощью временного мультиплексирования ввод информации в микроконтроллер осуществляется одним быстродействующим АЦП от датчиков Д1, Д2, Д3, Д4, Д5, Д6. К АЦП подключен источник опорного напряжения REF и генератор G, задающий время преобразования.
Микроконтроллер осуществляет управления мультиплексором, переключая на вход АЦП сигнал от обрабатываемого датчика, а также поддерживает интерфейс связи с АЦП. Источник опорного напряжения REF определяет допустимый диапазон входного напряжения и влияет на шумовые характеристики преобразования.
Микроконтроллер устанавливает соответствие сигналов с датчиков заданным нормам, формирует управляющие сигналы и представляет информацию в удобном для оператора виде.
Для управления исполнительным устройством ИУ используется цифроаналоговый преобразователь ЦАП. Поскольку ИУ потребляет большой ток и требует высокого напряжения, то на входе ИУ устанавливаем операционный усилитель.
Выбор датчиков
Датчик - это устройство, воспринимающее внешнее воздействие (измеряемую величину). Выдает эквивалентный электрический сигнал (заряд, ток, напряжение и т.д.), являющийся функцией этой измеряемой величины y=f(x), где х - входная измеряемая величина, y – выходной сигнал датчика.
Основой любого датчика является чувствительный элемент, преобразующий неэлектрические внешние воздействия в электрические сигналы.
В соответствии с физическим принципом, положенным в основу преобразования информации, различают следующие типы чувствительных элементов:
- резистивные
- электромагнитные
- гальваномагнитные
- пьезоэлектрические
- емкостные
- тепловые
- оптические
По принципу преобразования исследуемого параметра в электрический сигнал датчики бывают пассивные (параметрические) и активные (генераторные). Параметрические датчики используют электрическую энергию блока питания, а генераторные непосредственно преобразуют энергию исследуемого процесса в электрический сигнал.
Выбираем индуктивный датчик линейных перемещений типа ДИ-1М
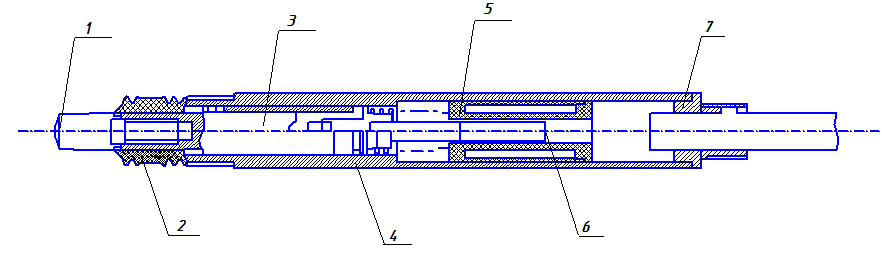
1 – измерительный наконечник
2 - измерительный шток
3 - сепаратор с шарами
4 – корпус
5 - катушки индуктивности
6 – якорь
7 – заделка кабеля
Технические данные датчика:
Рабочий диапазон перемещения……………………………… 1 мм
Максимальный диапазон………………………………………. 3 мм
Измерительное усилие………………………………………… 150 г
Число катушек…………………………………………………. 2
Напряжение питания………………………………………… 3 В
Частота………………………………………………………… 8000 Гц
Чувствительность……………………………………………. 0.5 мВ/мм
Изделие считается годным, если величина неточностей изготовления менее 0.1 мм. Изделие считается бракованным, если величина неточностей изготовления более 0.1 мм.
Индуктивный датчик удерживается с помощью винта в требуемом положении, обеспечивая его неподвижность.
В индуктивном датчике используется зависимость величины коэффициента самоиндукции реактивной катушки от измерения зазора в магнитной цепи.
Основными деталями датчика являются два электромагнита и железный якорь, измерительный стержень и выводковый шнур. Прибор включается в сеть переменного тока через трансформатор и стабилизатор напряжения. Измеряемая заготовка может быть определена концентричностью в некоторых пределах.
Операционный усилитель К140УД5Б
Операционным усилителем (ОУ) называют усилитель напряжения, предназначенный для выполнения различных операций над аналоговыми сигналами при работе в цепях с отрицательной обратной связью (ООС), в состав которых могут входить сопротивления (R), емкости (С), индуктивности (L), диоды, транзисторы и другие элементы.
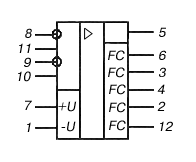
1 - напряжение питания -Uп;
2,3,4,6,12 - коррекция;
5 - выход;
7 - напряжение питания +Uп;
8,9 - входы инвертирующие;
10,11 - входы неинвертирующие;
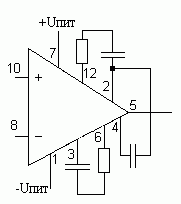
Схема включения
Электрические параметры усилителя
| Обозначе-ние | Электрические параметры | Допуск | К140УД5Б | Размерность |
| К | Коэффициент усиления напряжения | > | 1000 | В/мВ |
 | Напряжение источника питания |  10% 10% | 12 | В |
 | Диапазон выходных напряжений |  | +6,5; -4,5 | В |
 | Напряжение смешения нуля | < | 5 | мВ |
 | Ток потребления | < | 12 | мА |
 | Входной ток | < |  | нА |
 | Разность входных токов | < |  | нА |
 | Входное сопротивление | > | 0,003 | МОм |
 | Выходное сопротивление | < | 700 | Ом |
 | Температурный дрейф напряжения смещения | < | 10 | мкВ/0С |
 | Частота единичного усиления | > | 10 | мГц |
 | Синфазное входное напряжение | | 6 | В |
 | Дифференциальное входное напряжение | | 3 | В |
 | Скорость нарастания выходного напряжения | | 6 | В/мкс |
 | Сопротивление нагрузки |  | 5 | кОм |
| t | Температура окружающей среды | - | -10…+70 | ° C |
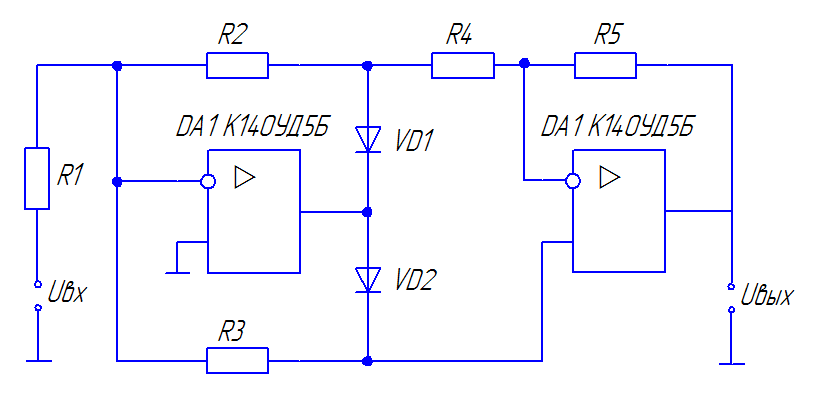
Генератор синусоидальных колебаний по схеме моста Вина
Исходные данные:
fср = 600 Гц
ПД 010 В
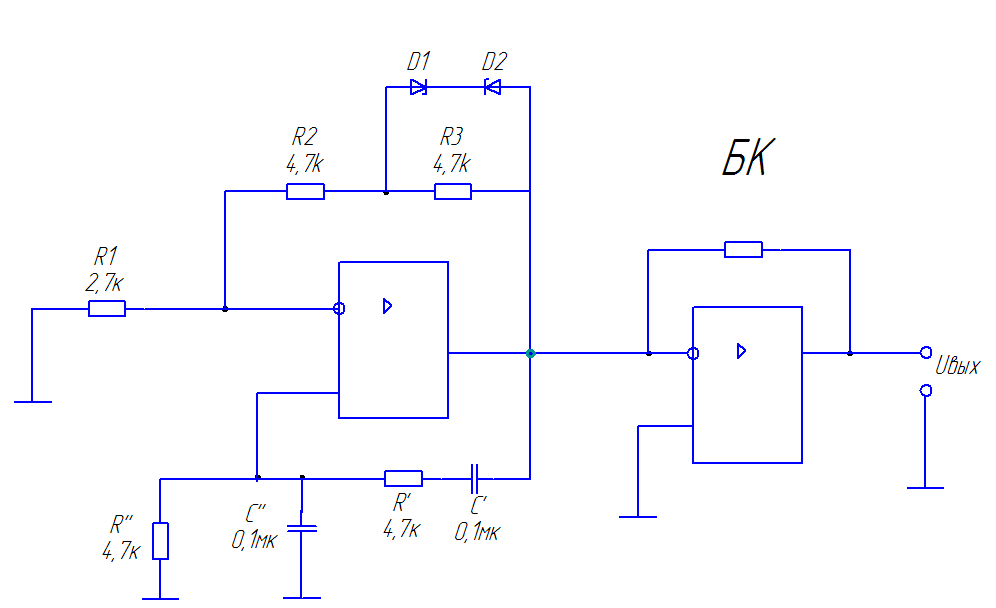
Генератор выполнен на микросхеме К140УД5Б.
В качестве частотно-зависимой цепи используется мост Вина, включенный ПОС:

На этой частоте коэффициент положительной обратной связи x=1/3 и фазовый сдвиг, вносимый цепью этой связи, равен 0. Поэтому для возникновения колебаний необходим неинвертирующий усилитель с коэффициентом усиления k=1/x=3. Для того чтобы генерация возникла и не сорвалась, этот коэффициент должен несколько превышать 3. При этом однако в отсутствии стабилитронов D1 и D2 амплитуда выходного напряжения будет нарастать вплоть до Uвых m=Uнас, где Uнас=Uпит = 12 В.
В установившемся режиме форма выходного напряжения будет отличаться от синусоиды, появятся горизонтальные участки, где Uвых = Uнас . При этом указанные участки будут тем шире, чем больше коэффициент усиления превышает 3. В пределе при высоком коэффициенте усиления кривая будет иметь трапецеидальную форму, приближающуюся к прямоугольной.
Включение стабилитронов D1 и D2 в цепь ООС делает последнюю нелинейной, что позволяет ограничить амплитуду на требуемом уровне. При малых значениях напряжения Uвых напряжение на диодах Uп меньше напряжения стабилизации Uст, сопротивление R3 не зашунтировано диодами. Сопротивления R1,R2,R3 выбираются так, чтобы коэффициент усиления К=1+
 был больше 3, вследствие чего амплитуды выходного напряжения и пропорционального ему напряжения на диодах Uд возрастают. При достижении напряжением Uд амплитудного значения, равному напряжению стабилизации Uст, и соответствующему ему амплитудного значения Uвых, тот или иной диод открывается, или пара стабилитронов шунтирует сопротивление R3. Вследствие этого выходное напряжение будет изменяться, но уже в противоположном направлении, возрастая (по модулю) до амплитудного значения другого знака. Включение стабилитрона предотвратит насыщение. Таким образом, колебания установятся с амплитудов Uвых m= (R1+R2+R3)/R3 , что следует из закона Ома.
был больше 3, вследствие чего амплитуды выходного напряжения и пропорционального ему напряжения на диодах Uд возрастают. При достижении напряжением Uд амплитудного значения, равному напряжению стабилизации Uст, и соответствующему ему амплитудного значения Uвых, тот или иной диод открывается, или пара стабилитронов шунтирует сопротивление R3. Вследствие этого выходное напряжение будет изменяться, но уже в противоположном направлении, возрастая (по модулю) до амплитудного значения другого знака. Включение стабилитрона предотвратит насыщение. Таким образом, колебания установятся с амплитудов Uвых m= (R1+R2+R3)/R3 , что следует из закона Ома.Расчет:
1. Необходим генератор, обеспечивающий частоту колебаний, равную:
fг = 10*fср = 10*600 = 6000 Гц
Для моста Вина частота генерации определяется по формуле:
fг=

 RC=
RC= =
= = 2,65 · 10‾ 5
= 2,65 · 10‾ 5 Используя номинальный ряд Е24, принимаем:
R’ = R’’ = R = 6,8 кОм
C’ = C’’ = C = 3,9 пФ
Примем R1=5,6 кОм, R2=6,8 кОм, R3=6,8 кОм.
Напряжение стабилизации на паре стабилитронов D1 и D2 Uст= ±4,2 В.
2. Убедимся, что коэффициент усиления до включения стабилитронов больше 3, а после включения меньше 3.
До включения стабилитронов:
К = 1+
 > 3
> 3К = 1+
 > 3
> 3После включения стабилитронов:
К = 1+
 < 3
< 3К = 1+
Таким образом, в приведенной схеме возникнут автоколебания.
3. Амплитуда колебаний:

Выбор и расчет измерительной схемы
Изменение измеряемой величины преобразуется в электрический сигнал с помощью чувствительного элемента датчика. ЧЭ включается в измерительную схему, питаемую от генератора с мостом Вина.
Измерительная схема преобразует сигнал, полученный от ЧЭ в процессе изменения в вариации амплитуды (амплитудная модуляция).
Выбираем параметрическую измерительную схему для включения ЧЭ: высокой точностью и малой чувствительностью к помехам являются мостовые схемы.
Выбираем комбинированный мост с двумя рабочими ЧЭ - L1 и L2.

Расчет:
Для начала найдём индуктивность L по формуле:
 , где
, гдеN – это количество витков;
d – диаметр катушки, см.;
l – длина намотки, см.
По справочнику берем N = 5000 , d = 0,004 см, l = 92,3 см



 - служат для балансировки моста.
- служат для балансировки моста. Примем

Рассчитаем выходное напряжение:

Датчик выполнен из высокотехнологичных материалов:
сердечник шихтованный, L1 и L2 имеют высокую добротность (
 ), а следовательно
), а следовательно , и поэтому:
, и поэтому: , где
, где  =
= - напряжение питания моста.
- напряжение питания моста.Для индуктивного датчика:
Поскольку допуск на размер равен 90мкм, задаемся предельным значением отклонения
 = 0,15*0,043 Гн =
= 0,15*0,043 Гн =
Тогда:

Выбор и расчет измерительного усилителя
Измерительные усилители предназначены для нормализации сигнала после измерительных схем, приведения его к стандартному уровню.
Напряжение внутренней диагонали мостовой схемы необходимо усилить до величины, которая соответствует максимальному входному напряжению аналого-цифрового преобразователя равно Uпит АЦП =10 В, напряжение с датчика при этом
Uвых.m = 0,81 В.
В справочных данных на ОУ К140УД5Б напряжение питания Uи.п.= ±12 В.
Типовая схема инструментального усилителя на К140УД5Б:

Расчет:

Положим
Напряжение на выходе усилителя при этом определяется по формуле:
Uвых =
По таблице 2 принимаем R2=100кОм, R1=10кОм, R3=10кОм

По ГОСТу принимаем
 тогда
тогда 
Напряжение на выходе усилителя:
 .
.Аналоговый выходной сигнал усилителя рассчитан на подачу на вход АЦП. Уровень этого сигнала согласован с входным диапазоном АЦП.
Выбор демодулятора
Демодулятор устанавливают на выходе усилителя, поэтому приведенный ко входу усилителя дрейф нуля пренебрежно мал. Демодулятор обеспечивает получение постоянного (медленно меняющегося) напряжения или тока. Для уменьшения погрешностей преобразования, обусловленных нелинейностью ВАХ диодов, в точных выпрямителях используют операционные усилители.
В зависимости от того, какой параметр переменного напряжения надо измерить, различают демодуляторы среднего значения, амплитудные, действующего значения, фазовые и частотные.
Пассивный демодулятор среднего значения выполнен в виде двух диодов VD1 и VD2. Данная схема является нефазочувствительной (НФЧВ).
Поскольку сигнал не требует усиления, то
R1=R2
Uвых = Uвх = 10 В.
Выбор и расчет активного фильтра 2-го порядка
Аналоговые активные фильтры на основе ОУ подключают к выходу демодулятора.
Фильтры низких частот (ФНЧ) используются для выделения постоянной составляющей выходного напряжения, нейтрализации помехи и улучшения качества сигнала.
ФНЧ пропускают полезный сигнал на выход, фильтруя при этом высокочастотные сигналы.

Исходные данные:
fср = 600 Гц
K0=2,5
Расчет:
Принимаем C=C1=C2
При этом C=
Принимаем R1=R2=R
При этом:

Округляем до табличного значения R = 2,7 кОм
Запишем формулу для определения коэффициента усиления в полосе пропускания
 = 2,5
= 2,5Отсюда определим значения сопротивлений R3, R4:


Выбираем из номинальных значений ряда Е24:
R4 = 6,8 кОм
R3 = 4,7 кОм
Выбор мультиплексора.
Для коммутации аналоговых сигналов после ФНЧ устанавливают аналоговый мультиплексор (АМХ). Он осуществляет выборку в соответствии с кодом адреса одного из нескольких входов и подключает его к выходу.
Следовательно будем использовать мультиплексор на 8 разрядов и 3 адресных входа:
n = 3
Nинф = 2 n = 8
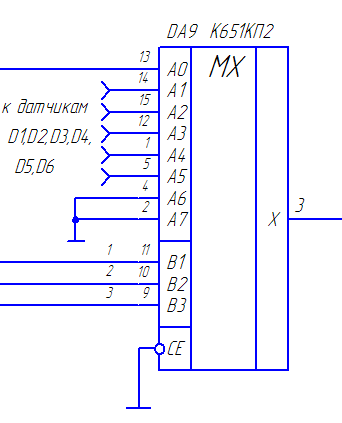
Составим таблицу истинности:
| Адресные входы | | |||
| А0 | А1 | А2 | Выход,Y | |
| 0 | 0 | 0 | X1 | |
| 0 | 0 | 1 | X2 | |
| 0 | 1 | 0 | X3 | |
| 0 | 1 | 1 | X4 | |
| 1 | 0 | 0 | X5 | |
| 1 | 0 | 1 | X6 | |
| 1 | 1 | 0 | X7 | |
| 1 | 1 | 1 | X8 | |
Запишем логическое выражение:

Выбор аналого-цифрового преобразователя.
Сущность аналого-цифрового преобразования сигнала состоит в быстром и точном измерении величины аналогового сигнала и последующее представление его в цифровой форме - обычно в позиционный двоичный код (ПДК). Процессы квантования и кодирования представляют собой основную операцию аналого-цифрового преобразования. Приборы, в которых измеренная аналоговая величина преобразуется в дискретную, называются аналого-цифровыми преобразователями.
Исходные данные:
ПД = 0÷10 В
 = 0,5
= 0,5 Расчет:
Определим разрядность АЦП:
Выбираем по таблице ближайшее значение разрядности n=8.
Для определения времени преобразования
 воспользуемся Теоремой Котельникова:
воспользуемся Теоремой Котельникова: , где
, где  – частота дискретизации
– частота дискретизацииОтсюда определим шаг дискретизации:
Время преобразования:
Тактовая частота взятия выборок:

Определим шаг квантования Q:
 =39 мВ
=39 мВМетодическая погрешность квантования:

Проверим, выполняется ли условие минимизации апертурной погрешности АЦП:
Условие минимизации выполняется, следовательно АЦП обладает достаточным быстродействием и не требует подключения устройства выборки и хранения (УВХ).
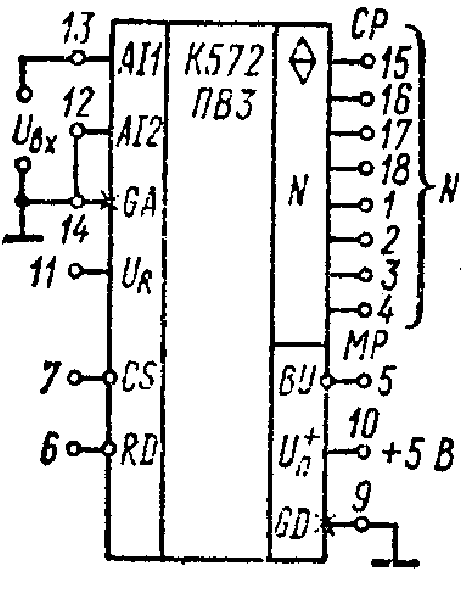
В соответствии с полученными параметрами, выбираем восьмиразрядный АЦП последовательного приближения К572ПВ3. Находим его данные по справочнику.
Микросхема К572ПВ3 представляет собой 8-ми разрядный АЦП последовательного приближения, сопрягаемый с микропроцессором. Связь с микропроцессорами осуществляется в режиме записи и преобразования данных. В качестве управляющих сигналов используется сигнал адресации СS, выдаваемый всеми микропроцессорами, и сигнал считывание/запись RD.
Разрешающая способность:
В состав ИС входят 8-разрядный цифро-аналоговый преобразователь, компаратор напряжения, регистр последовательного приближения, логическая схема управления и синхронизации, выходные схемы с тремя состояниями для согласования с внешней шиной.
АЦП имеет два одинаковых входа АI1и AI2, соединенных внутренними резисторами с одним и тем же входом компаратора. На этот же вход компаратора подается выходной ток цифро-аналогового преобразователя, управляемого регистром последовательного приближения.
Микросхема К572ПВ3 обладает достаточным быстродействием и не требует подключения устройства выборки и хранения (УВХ). Микросхема выполняет функцию 8-разрядного аналого-цифрового преобразования однополярного входного сигнала (от 0 до 10 В).
Список используемой литературы:
- Курс лекций по дисциплине «Электроника», прочитанные проф. В.И. Харитоновым, 2010
- Методические указания по выполнению курсовой работы по электронике №1695, МГТУ «МАМИ, 2003
- В.И. Харитонов «Управление техническими системами», Москва, 2010
- Б.К. Нестеренко «Интегральные операционные усилители», Москва, 1982
- Б.Г. Федорков «Микросхемы ЦАП и АЦП», Москва, 1990
- В.С. Гутников «Интегральная электроника в измерительных устройствах»
- В.С. Нестеренко «Интегральные операционные усилители»
- Э.И. Гитис « Аналого-Цифровые Преобразователи»