
Курсовая работа по дисциплине " Основы систем искусственного интеллекта" Тема: Опыт успешного применения нейронных сетей для различных задач спзкр. 99314 01 81 01
| Вид материала | Курсовая |
- Системы искусственного интеллекта, 58.18kb.
- Заочный Государственный Университет Внастоящее время все большее применение в разработке, 64.47kb.
- Ульяновский Государственный Технический Университет Кафедра вычислительной техники, 216.41kb.
- Ю. Н. Шунин Лекции по теории и приложениям искусственных нейронных сетей,Рига,2007, 190.96kb.
- Я. А. Трофимов международный университет природы, общества и человека «Дубна», Дубна, 71.95kb.
- Нейронные сети: основные положения, 111.38kb.
- Которая состоится 20 марта 2012 года в Москве. Конференция посвящена актуальным проблемам, 27.29kb.
- Программа дисциплины основы искусственного интеллекта (дпп. Ф. 10) для специальностей, 126.28kb.
- Нейрокомпьютерная техника: Теория и практика, 2147.23kb.
- Направления работы, 178.78kb.
1.6.2. Анализ технического задания
Изучение содержательной части задачи. Учитывая малое количество (12 - за 12 месяцев 1998 г.) наборов экспериментальных данных, на первом этапе исследования было проведено изучение представленных показателей. В результате ряд следующих показателей был исключен из дальнейшего рассмотрения:
- объем реализации по линии бюджета - поскольку данные являются неполными, содержат пропуски;
- затраты - поскольку более целесообразно рассматривать основные составляющие затрат: затраты на материалы и заработную плату;
• объем реализованной продукции - так как он связан жесткой аналитической зависимостью с другими показателями (прибыль = объем реализованной продукции - затраты);
- численность - из-за постоянства этого показателя в течение года;
- цена единицы продукции - фактор малоинформативен;
- рентабельность - этот показатель исключен по тем же причинам, что объем реализованной продукции.
В результате для дальнейшего анализа оставлены факторы:
- затраты на материалы;
- объем заработной платы;
- производительность;
- курс доллара США.
Выбор метода исследования. Учитывая, что в рассматриваемой ситуации ни о каких вероятностных предпосылках говорить не приходится (данных мало, скорее всего по годам объект исследования - нестационарен, не понятно, как определить генеральную совокупность и соответствующий закон распределения), в данном случае неприменимы известные статистические методы исследования. В соответствии с этим, в качестве метода исследования принят нейросетевой подход с использованием в качестве инструментального средства пакета NeuroPro.
1.6.3. Анализ данных
В соответствии с отобранными показателями и выходной величиной (валовой прибылью) с помощью МS Ехсеl, составляется таблица вида табл. 2. При ее подготовке указывается числовой формат ячеек с двумя знаками после запятой, а сама таблица сохраняется в формате Dbase, например, с именем Предприятие.dbf
Таблица 2
| Материалы | Зар. плата | Производство | Курс $ | Прибыль |
| 53,00 | 122,00 | 6003,00 | 6,00 | 99,20 |
| 58,00 | 126,00 | 5002,00 | 6,10 | 29,10 |
| 44,00 | 126,00 | 4474,00 | 6,10 | -41,60 |
| 63,00 | 104,00 | 4798,00 | 6,10 | 51,30 |
| 38,00 | 112,00 | 5273,00 | 6,20 | 111,90 |
| 32,00 | 74,00 | 3410,00 | 6,20 | 8,40 |
| 41,00 | 102,00 | 4237,00 | 6,20 | 54,70 |
| 33,00 | 76,00 | 2673,00 | 7,90 | -3,60 |
| 45,00 | 123,00 | 4406,00 | 16,10 | -45,40 |
| 50,00 | 117,00 | 4711,00 | 16,00 | 30,10 |
| 39,00 | 107,00 | 4833,00 | 17,90 | 65,50 |
| 58,00 | 218,00 | 5253,00 | 20,10 | -149,30 |
Будем полагать, что сеть содержит один скрытый слой при числе входов - 4, числе выходов - 1; требуемое число нейронов N рассчитывается по формулам, где в данном случае N = 12, N = 4, N = 1. При расчете получаем значение N = 0,52; округляя, принимаем число нейронов N = 1.
В программе НейроПро создаем нейронную сеть, после чего ее обучаем, в нашем случае это приведет к выдаче таблицы вида рис. 1.
В первой колонке - результаты, используемые при обучении, во второй - прогноз сети. Как видно, точность прогноза не очень высока, что объясняется малым объемом обучающей выборки из-за невыполнения условия значительной малости числа оставленных показателей по сравнению с объемом выборки.
-
№
ПРИБЫЛЬ
Ответ сети
1
99.2
75,46696
2
29.1
25,37945
3
-41.6
-37,86896
4
51.3
57,77771
5
111.9
73.04070
6
8.4
62.51123
7
54.7
50.95356
8
-3,6
-10.095
9
-45.4
-46,23219
10
30.1
34.66064
11
65.5
65.54205
12
-149,3
-140,7247
Рис. 1. Результаты тестирования нейронной сети
Окно, отражающее результаты анализа имеет вид: (рис. 2).
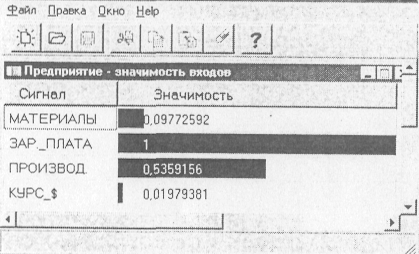
Рис. 2. Значимость факторов
Очевидно, наибольшее влияние на ежемесячную прибыль предприятия оказывает общий объем месячной заработной платы сотрудников. Вдвое меньше влияет производительность. Расходы на материалы и курс доллара США на прибыль практически не влияют. Данный вывод завершает проведенное исследование и может быть использован руководством предприятия для принятия каких-либо решений.
- Применение нейросетевых технологий в промышленности и машиностроении
Большие возможности открывает перед машиностроением применение теории сетей с нейроподобными элементами и развитие нейросетевых технологий.
В настоящее время можно говорить о том, что достаточно глубоко разработана формальная теория нейронных сетей. Решение различных задач в нейросетевом логическом базисе становится возможным на основе использования более 30-летнего научного задела в этом направлении. Количество таких задач возрастает стремительными темпами, особенно с увеличением их размерности. Сегодня можно говорить об универсальности нейросетевых технологий, о том, что любую задачу можно решить с их использованием [26].
Можно выявить достаточно много областей применения нейросетевой технологии для решения задач машиностроения. Перечислим наиболее важные задачи.
В области технической подготовки производства:
1.Разработка технологических справочников.
2.Разработка вычислительных алгоритмов и их реализация.
3.Разработка диагностических программных средств.
4.Разработка систем контроля качества.
5.Разработка систем автоматизированного нормирования.
6.Разработка систем мониторинга и управления технологическими процессами.
7.Разработка советчиков машиностроителя (технолога, руководителя предприятия или его подразделения).
8.Разработка систем адаптивного управления технологическими, экономическими и организационными процессами.
9.Прогнозирование технических характеристик новых изделий машиностроительного производства.
10.Маркетинговые исследования.
11.Разработка интеллектуальных САПР.
12.Разработка интеллектуальных тренажеров.
13.Создание компьютерных систем (сетей) по Lon Work - технологии.
Кратко рассмотрим конкретные примеры по применению НС в машиностроении и промышленности.
- Экспресс-нормирование времени механообработки с использованием нейросетей
Рассмотрено использование нейросетевых технологий для повышения качества технологической подготовки производства изделий тяжелого машиностроения путем экспресс-расчета норм времени на механическую обработку [6].
Предлагается для каждого выходного компонента построить отдельную сеть, что позволит:
1. Упростить функцию, реализуемую сетью, что уменьшит размеры сети и облегчит ее настройку;
- Сократить размерность функции ошибки и снизить количество локальных минимумов в ее поверхности;
- Исключить эффект, когда при обучении нейросети каждый выход пытается настроить сеть под себя, мешая тем самым другим выходам.
Обучение сетей производится методом обучения "с учителем" по данным технологических процессов изготовления деталей, составленных ранее на предприятии.
Применение предложенной методики позволяет учесть особенности конкретного предприятия (состав и характеристики оборудования, вспомогательное время и др.). При этом значительно сокращаются затраты времени и трудоемкость нормирования операций.
- Система автоматического управления автомобилем на основе НС
В настоящее время существует достаточно много экспериментальных систем автоматического управления автомобилем [7]. Одна из таких систем, ALVINN (Autonomous Land Vehicle In a Neural Network), построена с помощью ИНС и предназначена для управления грузовым автомобилем. Автомобиль снабжен многочисленными датчиками и видеокамерами, лазерным сканирующим устройством, автоматической навигационной системой, большим количеством компьютеров.
Для ориентации на местности используется полносвязная трехслойная сеть прямого распространения, которая обрабатывает поступающие от видеокамер цветовые сигналы, образующие поле 30х32 (или 45х48) пикселей. Скрытый слой образует 9 нейронов, а выходной - 45. При движении автомобиля по разным улицам сеть использует различные перестраиваемые весовые коэффициенты.
Используемое при движении автомобиля изображение с целью повышения контрастности дороги предварительно обрабатывается и передается на входы сети. ИНС рассчитывает путь, и выходные сигналы являются командами для необходимого поворота рулевого колеса. В системе используется 45 градаций поворота руля от "резко вправо" до "резко влево". При движении автомобиля со скоростью 90 км/ч и более выходные сигналы сети вычисляются 15 раз в секунду, т.е. управление автомобилем происходит в реальном времени.
Для обучения сети ей предъявляются обработанные изображения соответствующих дорог, полученные во время движения автомобиля, управляемого водителем. Для распознавания различных препятствий на пути движения (деревьев, строений и т.д.) используются трехмерные изображения, полученные с помощью лазеров. Кроме того, осуществлялось тестирование системы для различных типов дорог и разных погодных условий.
Автомобиль, снабженный описанной системой, успешно проехал в автоматическом режиме свыше 150 км. со скоростью 90 км/час и более.
- Нейросетевое прогнозирование качества термообработки сталей и сплавов [8]
Традиционные методы металлографического исследования, основанные на визуальном анализе фотографий микрошлифов образцов, позволяют качественно оценить структуры сталей. Однако указанный анализ может быть значительно усовершенствован, в том числе для применения в автоматизированных системах. Это становится возможным на основе моделирования визуальных характеристик фотографий микроструктуры сталей в связи с их физико-механическими свойствами. Нами разработана методика такого моделирования. Особенности методики изложены в данной работе.
Исходные положения состоят в следующем. Имеется микрошлиф образца стали. Необходимо определить отдельные характеристики технологии его изготовления, в том числе физико-механические свойства (например - твердость). В конечном итоге это позволяет составить заключение об особенностях технологии производства данного образца и выполнить прогноз его свойств. Кроме того, возникает возможность проводить экспертизу тех изделий, которые вызвали, например, разрушение какого-либо ответственного механизма или машины, а также вскрыть особенности технологии изготовления изделий, составляющие ноу-хау конкурирующей фирмы.
Преимущество предложенной методики моделирования состоит в том, что количество и состав показателей и характеристик можно изменять, но принцип исследований и применения останется тот же.
2.4. Применение нейрокомпьютеров в энергетических системах
Ниже представлен перечень основных задач, решаемых нейрокомпьютерами в современных энергетических системах [9]:
- предсказание нагрузки;
- прогнозирование температуры окружающей среды с целью прогнозирования нагрузки;
- управление потоками электроэнергии в сетях;
- обеспечение максимальной мощности;
- регулирование напряжения;
- диагностика энергосистем с целью определения неисправностей;
- оптимизация размещения датчиков для контроля безопасности энергосистем;
- мониторинг безопасности энергосистем; є обеспечение защиты трансформаторов;
- обеспечение устойчивости, оценка динамического состояния и диагностика генераторов;
- управление турбогенераторами;
- управление сетью генераторов;
- управление мощными переключательными системами.
Перечень задач применения нейрокомпьютеров в системах управления энергетическими системами постоянно растет.
- Система нейронного управления печью
Система управления печью разработана японской фирмой Omron Inc. [3]. Система представляет собой трехканальный медный цилиндр. Печь представляет собой миниатюрную модель устройств, применяемых в промышленности для формовки пластмассовых изделий. В такой печи требуется контролировать температуры от 100С до 3000С в трех каналах. В состав системы управления входит модуль датчиков, плата параллельного интерфейса ввода-вывода (ПВВ), микрокомпьютер NEC PC-9801F и исполнительное устройство. Мощность нагревателей - 280 Вт для меньшего цилиндра ("канал1") и 1,2 кВт для двух других цилиндров (каналы 2 и 3).
Модуль датчиков включает термоэлемент типа К (ТС12-4К) для изменений температуры на выходе цилиндров. Температуры от 0 до 120С смогут измеряться и преобразовываться в цифровую форму с помощью 12-разрядного АЦП (AD6940) с разрешающей способностью 0,2 С. Для включения и выключения нагревателей по управляющим сигналам используются твердотельные тиристоры (Omron G3N-220 B). Эти сигналы модулированы по ширине импульса (ШИМ). Когда управляющий сигнал имеет номинальную величину (100%), нагреватель включается в каждом интервале дискретизации на 6 с непрерывной работы. Основная управляющая программа написана на С++, а подпрограммы управления нагревателями - на Ассемблере (Intel 8086).
III. Применение нейросетевых технологий в диагностике и робототехнике
3.1. Нейронные сети в задачах робототехники

Можно предположить, что в будущем классические системы будут, вероятно, полностью заменены нейронными. В управлении роботами это касается, прежде всего, таких уровней как формализация задачи, планирование движений и регулирование приводов [10]. На рис.1 схематично представлен обзор областей применения нейронных сетей в робототехнике.
Основным признаком интеллектуальности робототехнических систем может считаться их способность самостоятельно решать поставленные задачи на основе сигналов многочисленных сенсоров. Эффективность обработки сигналов с помощью нейронных сетей и их оптимизационные способности позволяют уже сейчас реализовать, например, распознавание голосовых команд, ориентирование в пространстве или определение местоположения и свойств объектов в рабочей зоне.
Рис. 1 Области применения нейросетей в робототехнике
Самый нижний уровень управления роботами занимается вопросами регулирования приводов. Значительные трудности здесь возникают при реализации высокодинамичных свободных перемещений или при реализации взаимодействия робота с объектами (средой). В рамках сотрудничества ДонНТУ и Магдебургского университета проводятся исследования по проблемам интеллектульного управления приводов роботов. Проводимые исследования показывают, что нейронные сети могут быть применены для решения широкого круга задач. Нейрорегулирование тока с компенсацией нелинейных характеристик силового преобразователя в режиме прерывистого тока в приводе шагающего робота рассмотрены в [10.1]. Нейрорегуляторы скорости могут эффективно компенсировать нелинейные взаимовлияния осей роботов и характерные для приводов роботов возмущающие воздействия [10.2, 10.3]. Благодаря этому возможно линейное регулирование положения звеньев робота с высокими динамическими показателями качества. Инверсное преобразование координат и скоростей с помощью нейронных сетей - один из методов получения сигналов заданий и их производных для реализации комбинированного управления в контурах регулирования положения. Найденные решения могут быть распространены и на другие нелинейные системы электроприводов.
3.2. Проведение текстурного анализа ультразвуковых изображений с применением нейронных сетей
В данном разделе показана целесообразность применения нейронных сетей при выполнении сегментации и классификации текстур [11].
Основными критериями выбора способа классификации текстур в данной работе принимаются точность и скорость функционирования алгоритма классификации. В настоящее время основными способами эффективной классификации являются следующие [11.2]:
- классификация, использующая корреляционный анализ;
- классификация, использующая формулу Байеса;
- классификация с помощью искусственных нейронных сетей.
Преимущественно для проведения анализа использовать нейронную сеть с гибридной топологией. Поскольку сети встречного распространения обладают хорошей разрешающей способностью, но при этом используют простые разделяющие поверхности. Таким образом, если предъявить на вход сети встречного распространения результат, полученный от другой нейронной сети с более сложными разделяющими поверхностями, теоретически можно повысить качество проводимой классификации
Для выбора рациональной структуры гибридной нейронной сети может быть предложена следующая методика:
- Задаться набором признаков текстуры (например, набором выбранным в работе [1]).
Построить искусственное изображение, содержащее несколько текстур (например, текстур из альбома Бродаца).
- Получить обучающие выборки для всех данных текстур с учетом выбранного набора текстурных признаков.
- Выполнить обучение исследуемых нейронных сетей.
- Проверить точность классификации построенного изображения обученными сетями.
- Проверить точность классификации зашумленного изображения.
- Выполнить сегментацию и классификацию текстур реального ультразвукового изображения с помощью сети, показавшей наилучший результат.
Таким образом, на основании изложенной выше методики возможен выбор рациональной структуры гибридной нейронной сети для сегментации и классификации текстур ультразвуковых изображений.